
An Investigation of Parameter Tuning in the Random Adaptive
Grouping Algorithm for LSGO Problems
Evgenii Sopov and Alexey Vakhnin
Department of System Analysis and Operations Research,
Reshetnev Siberian State University of Science and Technology,
Krasnoyarsk, Russia
Keywords: Large-Scale Global Optimization, Problem Decomposition, Variable Grouping, Cooperative Coevolution,
Evolutionary Algorithms.
Abstract: Large-scale global optimization (LSGO) is known as one of the most challenging problem for many search
algorithms. Many well-known real-world LSGO problems are not separable and are complex for
comprehensive analysis, thus they are viewed as the black-box optimization problems. The most advanced
algorithms for LSGO are based on cooperative coevolution with problem decomposition using grouping
methods. The random adaptive grouping algorithm (RAG) combines the ideas of random dynamic grouping
and learning dynamic grouping. In our previous studies, we have demonstrated that cooperative coevolution
(CC) of the Self-adaptive Differential Evolution (DE) with Neighborhood Search (SaNSDE) with RAG
(DECC-RAG) outperforms some state-of-the-art LSGO algorithms on the LSGO benchmarks proposed
within the IEEE CEC 2010 and 2013. Nevertheless, the performance of the RAG algorithm can be
improved by tuning the number of subcomponents. Moreover, there is a hypothesis that the number of
subcomponents should vary during the run. In this study, we have performed an experimental analysis of
parameter tuning in the RAG. The results show that the algorithm performs better when using
subcomponents of larger size. In addition, some improvement can be done by applying dynamic group
sizing.
1 INTRODUCTION
Optimization problems with many hundreds or
thousands of objective variables are called large-
scale global optimization (LSGO) problems. LSGO
is known as one of the most challenging problem for
many search techniques from the field of
mathematical programming and evolutionary
optimization. Many well-known real-world LSGO
problems are not separable and are complex for
comprehensive analysis, thus they are viewed as the
black-box optimization problems even the objective
function has analytical representation (using
mathematical formula).
Evolutionary algorithms (EAs) have proved their
efficiency at solving many complex real-world
black-box optimization problems. However, their
performance usually decreases when the
dimensionality of the search space increases. The
most advanced algorithms for LSGO are based on
cooperative coevolution (CC) with problem
decomposition using different grouping methods,
which decomposes LSGO problems into multiple
low-dimensional non-overlapping subcomponents.
Unfortunately, the nonseparability of real-world
LSGO problems excludes a straightforward variable-
based decomposition. There exist at least three types
of subcomponent grouping methods, including:
static, random dynamic and learning dynamic
grouping. The static grouping performs well only for
well-studied LSGO problems with regular
structures. The majority of state-of-the-art LSGO
techniques are based on the random grouping and
the learning-based grouping. The standard random
grouping can be applied to the wide range of
separable and non-separable LSGO problems, but it
does not use any feedback from the search process
for creating more efficient variables combinations.
Many learning dynamic grouping techniques
demonstrates too greedy adaptation, thus performs
well only with separable LSGO problems.
Sopov, E. and Vakhnin, A.
An Investigation of Parameter Tuning in the Random Adaptive Grouping Algorithm for LSGO Problems.
DOI: 10.5220/0006959802550263
In Proceedings of the 10th International Joint Conference on Computational Intelligence (IJCCI 2018), pages 255-263
ISBN: 978-989-758-327-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255

In our previous study, we have proposed a novel
grouping technique that combines the ideas of the
random dynamic grouping and the learning dynamic
grouping. The approach is called the random
adaptive grouping (RAG). In our implementations,
the RAG is combined with cooperative coevolution
(CC) of the Self-adaptive Differential Evolution
(DE) with Neighborhood Search (SaNSDE) (the
whole search algorithm is called DECC-RAG). The
RAG starts with random subcomponents of an equal
predefined size. After some generations of the
DECC (so-called adaptation period), we estimate the
performance of each subcomponent. A portion of the
best subcomponents is saved for the next adaptation
period and for the rest of subcomponents we apply
the random grouping again. Such a feedback forms
different groups of variables and adaptively changes
them during the search.
In this study, we have performed an experimental
analysis of parameter tuning in the RAG. We have
estimated how the performance of the DECC-RAG
depends on the number of subcomponents. And, we
have implemented and investigated a modification
of the RAG with changing number of
subcomponents. In this paper, we will present the
experimental results for the LSGO CEC’10
benchmark only, because of great amount of time-
and resource-costly fitness evaluations.
Nevertheless, we will present and discuss the results
for the LSGO CEC’13 benchmark in our further
works and our presentation of the study.
The rest of the paper is organized as follows.
Section 2 describes related work. Section 3 describes
the proposed approach and experimental setups. In
Section 4 the results of numerical experiments are
discussed. In the Conclusion the results and further
research are discussed.
2 RELATED WORK
There exist a great variety of different LSGO
techniques that can be combined in two main
groups: non-decomposition methods and cooperative
coevolution (CC) algorithms. The first group of
methods are mostly based on improving standard
evolutionary and genetic operations. But the best
results and the majority of approaches are presented
by the second group. The CC methods decompose
LSGO problems into low dimensional sub-problems
by grouping the problem subcomponents. There are
many subcomponent grouping methods, including:
static grouping (Potter and Jong, 2000), random
dynamic grouping (Yang et al., 2008c) and learning
dynamic grouping (Omidvar et al., 2014, Liu and
Tang, 2013).
The first attempt to divide solution vectors into
several subcomponents using the static grouping was
proposed by (Potter and Jong, 1994). The approach
proposed by Potter and Jong decomposes a n-
dimensional optimization problem into n one-
dimensional problems (one subcomponent for each
variable). The CCGA employs CC framework and
the standard genetic algorithm (GA). Potter and Jong
had investigated two different modification of the
CCGA: CCGA-1 and CCGA-2. The CCGA-1
evolves each variable of objective in a round-robin
fashion using the current best values from the other
variables of function. The CCGA-2 algorithm
employs the method of random collaboration for
calculating the fitness of an individual by integrating
it with the randomly chosen members of other
subcomponents. Potter and Jong had shown that
CCGA-1 and CCGA-2 outperforms the standard
GA. Unfortunately, search techniques based on the
static grouping are inefficient for many non-
separable LSGO problems.
One of the most popular and well-studied random
grouping method had been proposed by Yang et al.
(Yang et al., 2007, Yang et al., 2008c) and uses a
DE-based CC method. The approach is called
DECC-G and it is used as a core conception for
many advanced techniques.
The learning dynamic grouping seems to be the
most perspective approach as it collects and uses
feedback information for improving the
decomposition stage. There were proposed a CC
algorithm based on the correlation matrix (Ray and
Yao, 2009), a CC with Variable Interaction Learning
(CCVIL) (Chen et al, 2010), an automated
decomposition approach (DECC-DG) with
differential grouping (Omidvar et al., 2014) and
many others. In our previous studies, we have
proposed the adaptive variable-size random
grouping algorithm (AVS-RG CC) based on the
Population-Level Dynamic Probabilities adaptation
model (Sopov, E., 2018). A good survey on LSGO
and methods is proposed in (Mahdavi et al., 2015).
The DECC-RAG algorithm (Vakhnin and
Sopov, 2018), which is investigated in this study,
combines the RAG approach with CC of the
SaNSDE. The SaNSDE algorithm have been
proposed by (Yang et al, 2008b). We have chosen
this algorithm because of its self-adaptive tuning of
parameters during optimization process. After each
regrouping of variable in the CC stage of the DECC-
RAG, we will deal with new optimization problems,
thus we need to choose a new efficient search
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
256

algorithm for each subcomponent. The SaNSDE
forms an efficient combination of DE’s parameters
(such as the type of mutation, the differential weight
and the crossover probability) in an automated (self-
adaptive) way.
The DECC-RAG operates with subcomponents
of equal size. This limitation excludes such
problems of the grouping methods as uneven
distribution of computational resources between
search algorithms and tuning the minimum and
maximum number of variables in groups. The RAG
divides the n-dimensional solution vector into m s-
dimensional sub-components (m x s = n), thus the
number of subcomponents is a parameter of the
algorithm. In our previous study we have estimated
the performance of the DECC-RAG with m = 10 on
the CEC’10 and CEC’13 LSGO benchmarks. The
experiments have shown that the proposed approach
outperforms on average some state-of-the-art
algorithms such as DMS-L-PSO dynamic multi-
swarm and local search based on PSO algorithm)
(Liang and Suganthan, 2005), DECC-G (cooperative
coevolution with random dynamic grouping based
on differential evolution) (Yang et al, 2008c),
MLCC (Multilevel cooperative coevolution based on
differential evolution) (Yang et al, 2008a) and
DECC-DG DECC-DG (cooperative coevolution
with differential grouping based on differential
evolution) (Omidvar et al, 2014).
It should be noted that the comprehensive
experimental analysis of LSGO algorithms is a
challenging problem because computations are time-
and resource-costly. According to the CEC LSGO
competition rules, the performance of a LSGO
algorithm is evaluated through 25 independent runs
on each benchmark problem using 3x106 fitness
evaluations in each independent run of the algorithm
(Li et al., 2013). In a case of serial computations
using 1 processor, the time for estimating the
performance of one algorithm (or one configuration
of an algorithm) is about 28 hours for LSGO
CEC’10 benchmark and is about 255 hours for
LSGO CEC’13 benchmark. We have implemented
all our numerical experiments using the C++
OpenMP framework for parallel computing. The
time of computations using 16 processors is about 5
hours for LSGO CEC’10 benchmark and is about 22
hours for LSGO CEC’13 benchmark.
3 EXPERIMENTAL SETUPS
The general scheme of the DECC-RAG can be
described by the following pseudo code:
Pseudocode of the DECC-RAG algorithm.
1: Set FEV_max, FEV_global, T,
FEV_local = 0;
2: An n-dimensional object vector is
randomly divided into m
s-dimensional subcomponents;
3: i = 1;
4: Evolve the i-th subcomponent with
SaNSDE algorithm;
5: FEV_local++, FEV_global++;
6: If i < m, then i++, and go to
Step 4 else go to Step 7;
7: Choose the best_solution
i
for each
subcomponents;
8: If (FEV_local < T) then go to
Step 3 else go to Step 9;
9: Choose m/2 subcomponents with the
worse performance and randomly mix
indices of their variables, restart
parameters of SaNSDE for the choosen
m/2 subcomponents, FEV_local = 0;
10: If (FEV_global < FEV_max) go to
Step 3, else go to Step 11;
11: Return the best found solution.
Here FEV_max is maximum number of fitness
evaluations, T is an adaptation period, FEV_local
and FEV_global are counters for fitness evaluation
inside the adaptation period and for the whole
algorithm, respectively.
We use the following general settings for the
experiments:
20 CEC’10 LSGO benchmark problems;
Dimensionality of all problems are D = 1000;
FEV_max is 3x10
6
in each independent run ;
25 independent runs for each benchmark
problem;
The performance of algorithms is estimated
using the median value of the best found
solutions;
Population size for each subcomponent is 50;
Adaptation period T is 3x10
5
;
Number of subcomponents m is {4, 8, 10, 20,
40, 50, 100}. We use the following notation:
DECC-RAG(m);
The DECC-RAG(4-8) algorithm starts with
m=4, and after 4 periods of adaptation (T=4,
FEV=1.2x10
6
) m is changed to 8;
All parameters of the SaNSDE algorithm are
self-adaptive.
An Investigation of Parameter Tuning in the Random Adaptive Grouping Algorithm for LSGO Problems
257
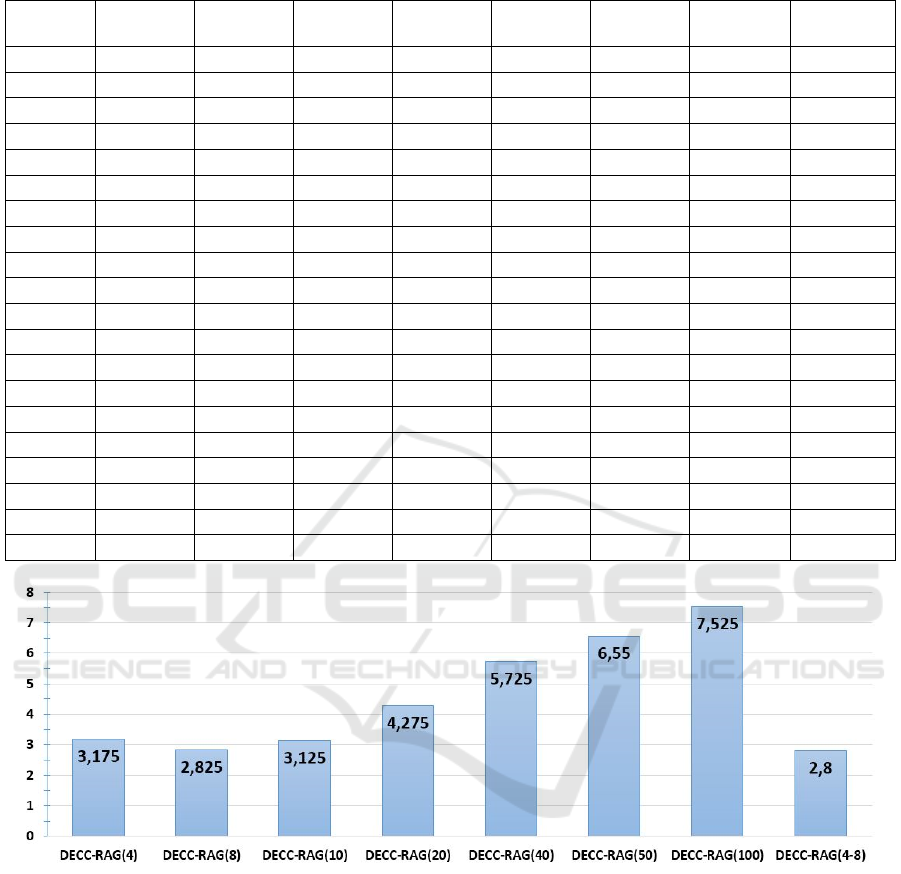
Table 1: The experimental results on the CEC’10 LSGO benchmark problems.
Problem
DECC-
RAG(4)
DECC-
RAG(8)
DECC-
RAG(10)
DECC-
RAG(20)
DECC-
RAG(40)
DECC-
RAG(50)
DECC-
RAG(100)
DECC-
RAG(4-8)
1 7.96E-10 1.02E-17
1.97E-18
3.30E-10 1.61E+02 1.58E+04 1.91E+07 6.55E-14
2 3.00E+03 1.23E+03
7.87E+02
1.82E+03 4.62E+03 5.16E+03 5.85E+03 2.99E+03
3 1.09E+01 2.75E+00 1.49E+00
1.21E-08
1.09E-02 1.45E-01 3.53E+00 1.06E+01
4
6.85E+11
9.67E+11 1.02E+12 2.24E+12 3.45E+12 4.58E+12 8.99E+12 9.35E+11
5 7.96E+07 1.43E+08 1.63E+08 2.27E+08 3.94E+08 4.86E+08 7.00E+08
7.67E+07
6
2.03E+01 2.03E+01
2.04E+01 2.07E+01 1.98E+07 2.00E+07 2.00E+07
2.03E+01
7 5.93E+00 8.76E+00 1.70E+02 5.06E+05 1.08E+08 3.39E+08 3.09E+09
2.00E+00
8
2.09E+04
1.03E+07 2.36E+07 4.07E+07 1.17E+08 1.47E+08 3.01E+08 2.76E+06
9
4.22E+07
5.46E+07 6.60E+07 1.15E+08 1.97E+08 2.31E+08 3.44E+08 4.40E+07
10 4.98E+03 3.70E+03 3.24E+03
2.11E+03
5.27E+03 8.85E+03 1.17E+04 4.89E+03
11
1.11E+02
2.15E+02 2.16E+02 2.35E+02 2.35E+02 2.35E+02 2.35E+02 1.15E+02
12 2.73E+04 9.05E+03
8.68E+03
2.51E+04 9.51E+04 1.32E+05 3.34E+05 1.38E+04
13 1.33E+03 1.69E+03
1.30E+03
2.92E+03 1.06E+04 3.32E+04 2.20E+05 2.09E+03
14 1.70E+08 1.70E+08 2.00E+08 4.07E+08 1.09E+09 1.40E+09 3.09E+09
1.61E+08
15 5.78E+03 5.27E+03 5.00E+03
4.32E+03
1.29E+04 1.36E+04 1.53E+04 5.73E+03
16 2.79E+02 4.11E+02 4.28E+02 4.29E+02 4.29E+02 4.29E+02 4.28E+02
2.63E+02
17 2.22E+05
1.46E+05
1.67E+05 3.91E+05 9.90E+05 1.27E+06 1.74E+06 1.80E+05
18
3.81E+03
4.92E+03 5.95E+03 9.74E+03 1.18E+05 1.07E+05 1.01E+05 5.80E+03
19 1.86E+06 1.98E+06 2.20E+06 4.41E+06 1.29E+07 1.56E+07 1.57E+07
1.68E+06
20 2.29E+03 1.91E+03 1.82E+03 1.13E+03
1.04E+03
1.06E+03 2.97E+03 2.16E+03
Figure 1: The DECC-RAG(m) ranking.
The experimental results for the DECC-RAG(m)
are presented in Table 1. Figure 1 shows the results
of ranking the investigated algorithms (ranks are
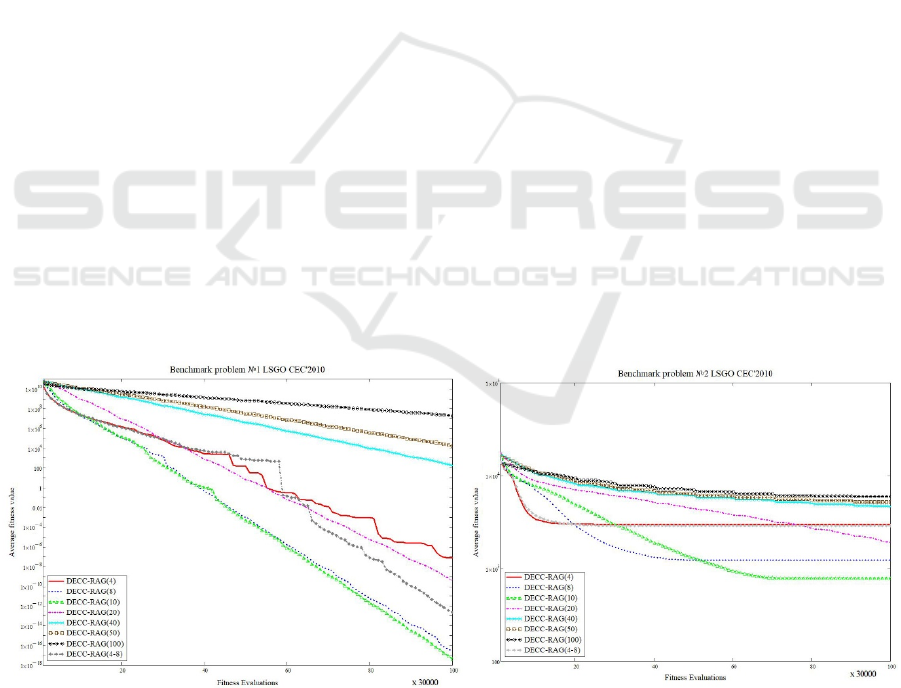
averaged over the benchmark problems). Figures 3-
12 demonstrate the convergence of the best-found
solutions of each algorithm averaged over 25
independent runs.
As we can see from the Table 1, the DECC-RAG
algorithm performs better with small number of
subcomponents, which contains large number of
variables. This means that the approach is able to
provide an efficient decomposition of a problem and
to form efficient combinations of variables in
subcomponents. The best results are achieved by the
DECC-RAG(8), DECC-RAG(4) and DECC-
RAG(10). At the same time, we can see in the
Figures 3-12 that different configurations of the
algorithm have different speeds of the convergence.
Some configurations have good convergence at the
early stages of the search process, but have worse
the best-found value. Some configurations
demonstrate low convergence speed, but are able to
improve the best-found value at the finally stage of
the search process. Thus, we can conclude that the
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
258
dynamic sizing of subcomponents may improve the
performance of the algorithm.
The DECC-RAG(4-8) is a straightforward
approach of changing the number of subcomponents
during the run of the algorithm. As we can see in the
Figure 1, this configuration has taken the best
average rank over the benchmark.
In real-world LSGO problems, the best settings
for the algorithms are unknown beforehand and the
m value can be chosen at random. Our hypothesis is
that the dynamic sizing is more preferable than the
random choice of m. The performance of the random
choice of m can be estimated by evaluating the
average performance of all configurations. We have
compared the DECC-RAG(4-8) with the following
average values:
The average of 4 and 8 for establishing the
difference in the performance against the
random choice of m=4 and m=8;
The average of 4, 8, 10 and 20, because we
have found that lower values of m perform
better;
The average of 4, 8, 10, 20, 40, 50, 100 for
investigating the random choice of m.
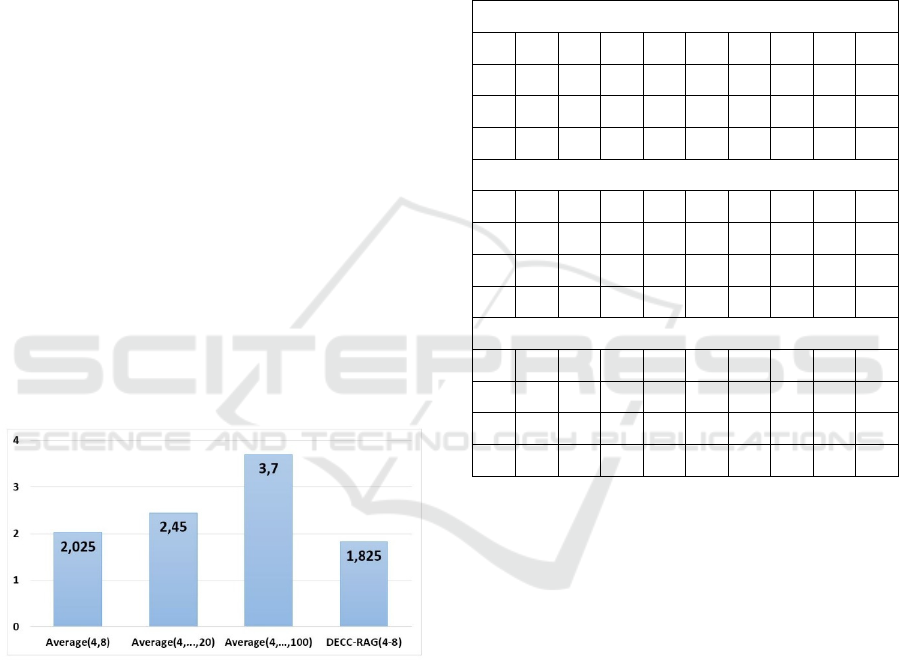
Figure 2 shows the results of ranking the DECC-
RAG(4-8) and the estimated performance of random
choice of m.
Figure 2: Comparison of ranks for the DECC-RAG(4-8)
and the average of DECC-RAG(m).
Table 2 contains the results of Mann–Whitney U
test with p-value equal to 0.05. We use the following
notations in Tables 2: the sign “<” means that the
first algorithm outperforms the second one,
otherwise the sign “>” is used, and the sign “≈” is
used when there is no statistically significant
difference in the results.
As we can see from the results, the dynamic
sizing is more preferable than the random choice
when the optimal value of m is unknown. Also, we
can see from Table 1 that the dynamic sizing
(DECC-RAG(4-8)) is better than the best
configuration of the DECC-RAG(m) with m=8.
It is obvious that the dynamic sizing can be
implemented with other combinations of parameter
m. Moreover, we can use not only deterministic
schemes, but we can change sizes adaptively using a
feedback. We will design and investigate these
approaches in our further works.
Table 2: Results of Mann–Whitney U test for
the DECC-RAG(4-8) vs Average(m).
DECC-RAG (4-8) vs Average (4, 8)
F
1
F
2
F
3
F
4
F
5
F
6
F
7
F
8
F
9
F
10
< > > ≈ < ≈ < < < >
F
11
F
12
F
13
F
14
F
15
F
16
F
17
F
18
F
19
F
20
< < ≈ < > < ≈ > < ≈
DECC-RAG (4-8) vs Average(4, 8, 10, 20)
F
1
F
2
F
3
F
4
F
5
F
6
F
7
F
8
F
9
F
10
< > > < < < < < < >
F
11
F
12
F
13
F
14
F
15
F
16
F
17
F
18
F
19
F
20
< < ≈ < > < < ≈ < >
DECC-RAG (4-8) vs Average(4, 8, 10, 20, 40, 50, 100)
F
1
F
2
F
3
F
4
F
5
F
6
F
7
F
8
F
9
F
10
< < > < < < < < < <
F
11
F
12
F
13
F
14
F
15
F
16
F
17
F
18
F
19
F
20
< < < < < < < < < >
4 CONCLUSIONS
In this study, we have presented the investigation of
tuning the number of subcomponents in the random
adaptive grouping algorithm that combines the ideas
of random dynamic grouping and learning dynamic
grouping for solving LSGO problems. The
experimental results have shown that the algorithm
is able to provide an efficient decomposition of a
problem and to form efficient combinations of
variables in subcomponents, thus performs better
when using subcomponents of larger size. We have
also demonstrated that the dynamic sizing is more
preferable than choosing the number of
subcomponents at random, and the straightforward
scheme DECC-RAG(4-8) outperforms the best
configuration of the DECC-RAG. In our further
works, we will investigate other settings of the
proposed approach and other schemes of the
dynamic sizing of subcomponents.
An Investigation of Parameter Tuning in the Random Adaptive Grouping Algorithm for LSGO Problems
259
ACKNOWLEDGEMENTS
This research is supported by the Ministry of
Education and Science of Russian Federation within
State Assignment № 2.1676.2017/ПЧ.
REFERENCES
Chen, W. et al., 2010. Large-scale global optimization
using cooperative coevolution with variable
interaction learning, in Parallel Problem Solving from
Nature, PPSN XI, Springer, pp. 300–309.
Li, X., Tang, K., Omidvar, M.N., Yang, Zh., Qin, K.,
2013. Benchmark functions for the CEC 2013 special
session and competition on large-scale global
optimization, Technical Report, Evolutionary
Computation and Machine Learning Group, RMIT
University, Australia.
Liang, J.J., Suganthan, P.N., 2005. Dynamic multi-swarm
particle swarm optimizer, in Proceedings - 2005 IEEE
Swarm Intelligence Symposium, SIS 2005, pp. 127–
132.
Liu, J., Tang, K., 2013. Scaling up covariance matrix
adaptation evolution strategy using cooperative
coevolution, in Intelligent Data Engineering and
Automated Learning – IDEAL 2013, pp. 350–357.
Mahdavi, S., Shiri, M.E., Rahnamayan, Sh., 2015.
Metaheuristics in large-scale global continues
optimization: A survey, in Information Sciences, vol.
295, pp. 407–428.
Omidvar, M.N. et al., 2014. Cooperative co-evolution with
differential grouping for large scale optimization,
IEEE Transactions on Evolutionary Computation,
18(3), pp. 378–393.
Potter, M.A., De Jong, K.A., 1994. A cooperative
coevolutionary approach to function optimization,
LNCS, vol. 886, pp. 249–257.
Potter, M.A., De Jong, K.A., 2000. Cooperative
Coevolution: An Architecture for Evolving Coadapted
Subcomponents, Evolutionary Computation, 8(1), pp.
1–29.
Ray, T., Yao, X., 2009. A cooperative coevolutionary
algorithm with correlation based adaptive variable
partitioning, in IEEE Congress on Evolutionary
Computation, 2009 (CEC’09), pp. 983–989.
Sopov, E., 2018. Adaptive Variable-size Random
Grouping for Evolutionary Large-Scale Global
Optimization, in Proceedings of ICSI 2018, LNCS
10941, pp. 1–10.
Vakhnin, A., Sopov, E, 2018. A novel method for
grouping variables in cooperative coevolution for
large-scale global optimization problems, in the 15th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO 2018), pp. 1-8.
Yang, Z., Tang, K., Yao, X., 2007. Differential evolution
for high-dimensional function optimization, in IEEE
Congress on Evolutionary Computation, IEEE CEC
2007, pp. 3523–3530.
Yang, Z., Tang, K., Yao, X. 2008a. Multilevel cooperative
coevolution for large scale optimization, in 2008 IEEE
Congress on Evolutionary Computation, CEC 2008,
pp. 1663–1670.
Yang, Z., Tang, K., Yao, X., 2008b. Self-adaptive
differential evolution with neighborhood search, in
2008 IEEE Congress on Evolutionary Computation,
CEC 2008, pp. 1110–1116.
Yang, Z., Tang, K., Yao, X., 2008c, Large scale
evolutionary optimization using cooperative
coevolution, Information Sciences, 178(15), pp. 2985–
2999.
Figure 3: Convergence of the best found for benchmark problems 1 and 2.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
260
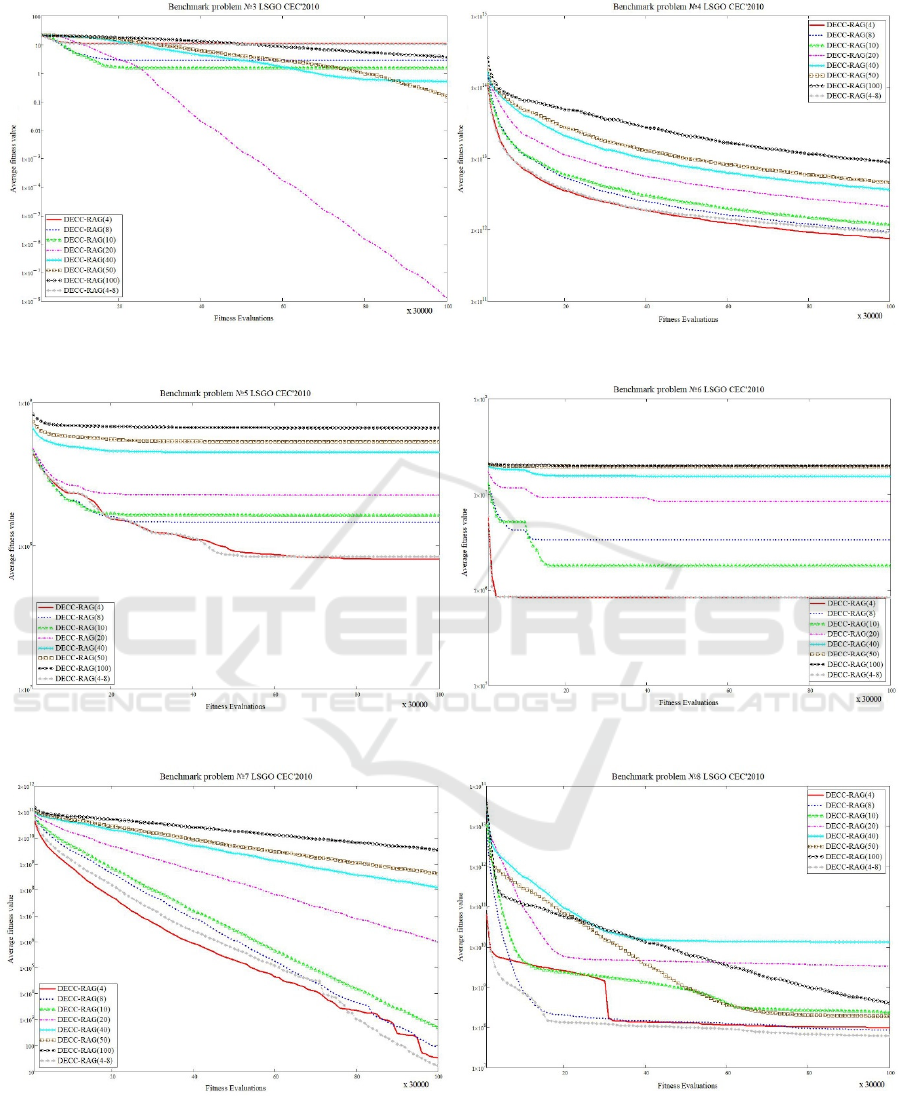
Figure 4: Convergence of the best found for benchmark problems 3 and 4.
Figure 5: Convergence of the best found for benchmark problems 5 and 6.
Figure 6: Convergence of the best found for benchmark problems 7 and 8.
An Investigation of Parameter Tuning in the Random Adaptive Grouping Algorithm for LSGO Problems
261
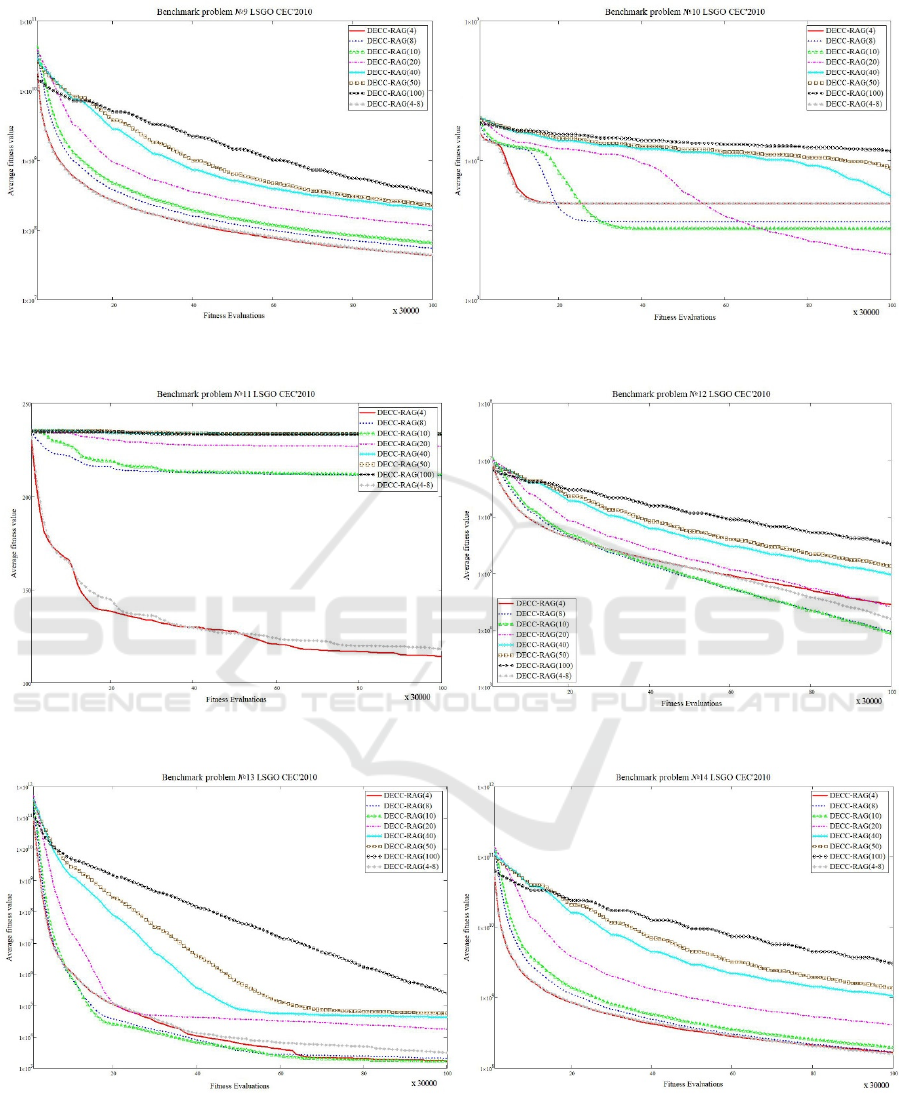
Figure 7: Convergence of the best found for benchmark problems 9 and 10.
Figure 8: Convergence of the best found for benchmark problems 11 and 12.
Figure 9: Convergence of the best found for benchmark problems 13 and 14.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
262
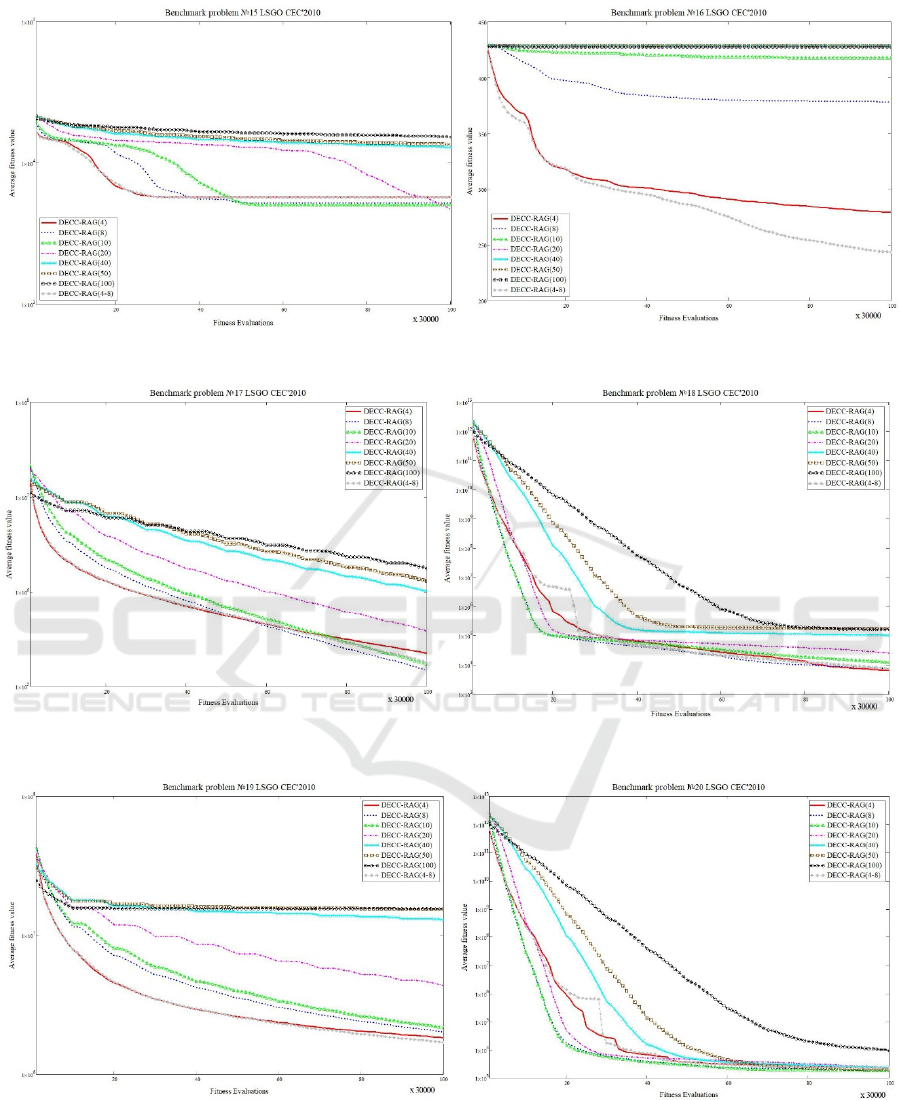
Figure 10: Convergence of the best found for benchmark problems 15 and 16.
Figure 11: Convergence of the best found for benchmark problems 17 and 18.
Figure 12: Convergence of the best found for benchmark problems 19 and 20.
An Investigation of Parameter Tuning in the Random Adaptive Grouping Algorithm for LSGO Problems
263
