
A Fully Object-space Approach for Full-reference Visual Quality
Assessment of Static and Animated 3D Meshes
Zeynep Cipiloglu Yildiz
1
and Tolga Capin
2
1
Computer Engineering Dept., Manisa Celal Bayar University, Manisa, Turkey
2
Computer Engineering Dept., TED University, Ankara, Turkey
Keywords:
Visual Quality Assessment, Animation, Geometry, Contrast Sensitivity Function, Manifold Harmonics.
Abstract:
3D mesh models are exposed to several geometric operations such as simplification and compression. Several
metrics for evaluating the perceived quality of 3D meshes have already been developed. However, most
of these metrics do not handle animation and they measure the global quality. Therefore, a full-reference
perceptual error metric is proposed to estimate the detectability of local artifacts on animated meshes. This
is a bottom-up approach in which spatial and temporal sensitivity models of the human visual system are
integrated. The proposed method directly operates in 3D model space and generates a 3D probability map that
estimates the visibility of distortions on each vertex throughout the animation sequence. We have also tested
the success of our metric on public datasets and compared the results to other metrics. These results reveal a
promising correlation between our metric and human perception.
1 INTRODUCTION
3D mesh modeling and rendering methods have ad-
vanced to the level that they are now common in 3D
games, virtual environments, and visualization appli-
cations. Conventional way of improving the visual
quality of a 3D mesh is to increase the number of
vertices and triangles. This provides a more detailed
view; nevertheless, it also leads to a performance
degradation. As a result, we need a measure for es-
timating the visual quality of 3D models, to be able
to balance the visual quality of 3D models and their
computational time.
Most of the operations on 3D meshes cause certain
distortions on the mesh surface and requires an esti-
mation of the distortion. For instance, 3D mesh com-
pression and streaming applications require a trade-
off between the visual quality and transmission speed.
Watermarking techniques introduce artifacts and one
should guarantee the invisibility of these artifacts.
Most of the existing 3D quality metrics omit the tem-
poral aspect which is challenging.
Yildiz et al. (Yildiz and Capin, 2017) propose a
perceptual visual quality metric devised for dynamic
meshes. They measure the 3D spatiotemporal re-
sponse at each vertex by modeling Human Visual Sys-
tem (HVS) processes such as contrast sensitivity and
channel decomposition. Their framework follows a
principled bottom-up approach and produces encour-
aging results. In their method, they first construct
an intermediate representation for the dynamic mesh,
which is a 4D space-time (3D+time) volume called
spatiotemporal volume. However, 4D nature of this
representation makes the framework computationally
inefficient.
In this work, we build on top of the framework
in (Yildiz and Capin, 2017) and remove the neces-
sity for the spatiotemporal volume. Thus we make
the perceptual pipeline in (Yildiz and Capin, 2017)
fully mesh-based. In this method, we benefit from
the eigen-decomposition of a mesh since eigenvalues
are identified as natural vibrations of a mesh (Botsch
et al., 2010, Chapter 4) and hence, they are directly
related to the geometric quality of the mesh. We
also compare our results to the method in (Yildiz
and Capin, 2017), in terms of both accuracy and ef-
ficiency.
2 RELATED WORK
We can categorize the methods for mesh quality as-
sessment as perceptual and non-perceptual methods.
Non-perceptual methods such as Euclidean distance,
Hausdorff distance, root-mean squared error, etc., rely
Yildiz, Z. and Capin, T.
A Fully Object-space Approach for Full-reference Visual Quality Assessment of Static and Animated 3D Meshes.
DOI: 10.5220/0007245001690176
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 169-176
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
169

on purely geometric measurements without consider-
ing human visual perception; thus they are not cor-
related with the human perception. On the other
hand, perceptually-based metrics incorporate mech-
anisms of HVS. Comprehensive surveys on general
mesh quality assessment methods can be found in
(Bulbul et al., 2011) and (Lavou
´
e and Mantiuk, 2015);
whereas surveys on perceptual quality metrics are
presented in (Lin and Jay Kuo, 2011) and (Corsini
et al., 2013).
Image-based perceptual metrics operate in 2D
image space by using rendered images of the 3D
mesh while evaluating the visual quality. These met-
rics generally employ HVS models such as Contrast
Sensitivity Function (CSF), which maps spatial fre-
quency to visual sensitivity. Most common image
quality metric is Visible Difference Prediction (VDP)
method which produces a 2D local visible distortions
map, given reference and test images (Daly, 1992).
Similarly, Visual Equivalence Detector method out-
puts a visual equivalence map which demonstrates
the equally perceived regions of two images (Rama-
narayanan et al., 2007).
Curvature and roughness of a surface are widely
employed for describing surface quality. GL1 (Karni
and Gotsman, 2000) and GL2 (Sorkine et al., 2003)
are roughness-based metrics that use Geometric
Laplacian of the mesh vertices. Lavoue et al. (Lavou
´
e
et al., 2006) measure structural similarity between
two mesh surfaces by using curvature for extracting
structural information. This metric is improved with
a multi-scale approach in (Lavou
´
e, 2011). Two def-
initions of surface roughness are utilized for deriv-
ing two error metrics called 3DW PM1 and 3DWPM2
(Corsini et al., 2007). Another metric called FMPD is
also based on local roughness derived from Gaussian
curvature (Wang et al., 2012). Curvature tensor differ-
ence of two meshes is used for measuring the visible
errors between two meshes (Torkhani et al., 2014). A
novel roughness-based perceptual error metric, which
incorporates structural similarity, visual masking, and
saturation effect, is proposed by Dong et al. (Dong
et al., 2015). There are also recent studies that lever-
age machine learning methods for mesh quality as-
sessment (Yildiz et al., 2018). A metric specific to the
validation of human body models is also proposed in
(Singh and Kumar, 2017).
The literature survey shows that most of the ex-
isting visual quality metrics do not take the temporal
effects into account. Moreover, they are mostly con-
cerned with the global quality of the meshes rather
than the local visibility of distortions. These issues
were already addressed by (Yildiz and Capin, 2017).
The main objective of this study is to remove the ne-
cessity for a spatiotemporal volume in that method;
thus making the pipeline fully object-space.
3 APPROACH
In this mesh-based approach, almost the same steps
in (Yildiz and Capin, 2017) exist with several adap-
tations for 3D. The method is applied on the mesh
vertices, not on the spatiotemporal volume represen-
tation. However, this introduces a restriction for the
reference and test meshes to have the same number of
vertices, since the computations are done per vertex.
The steps of the method are displayed in Figure 1.
Frames for reference and test animations go through
the same processing pipeline and the difference be-
tween these results gives us the per vertex visible dif-
ferences prediction map. Details of each step are ex-
plained below.
3.1 Preprocessing
In this step, illumination calculation and vertex veloc-
ity estimation are performed as in the spatiotemporal
volume approach. Instead of the spatiotemporal vol-
ume calculation, Manifold Harmonics Basis (MHB)
are computed and stored to feed the Channel Decom-
position step of the proposed approach.
Illumination Calculation. Vertex shades are com-
puted using Phong reflection model with only diffuse
and ambient components. Most of the user experi-
ments for measuring the visual quality of 3D meshes
in the literature, use such a simple shading scheme.
Calculation of MHBs. Calculation of MHBs is a
costly operation since it requires eigen-decomposition
of the mesh Laplacian. Fortunately, once they are
computed; there is no need to recalculate them.
For a triangle mesh of n vertices, a function basis
H
k
, called MHB is calculated. The k
th
element of the
MHB is a piecewise linear function with values H
k
i
defined at i
th
vertex of the surface, where k = 1...m
and i = 1...n (Vallet and L
´
evy, 2008). MHB is com-
puted as the eigenvectors of discrete Laplacian of
¯
∆
whose coefficients are given in Eq. 1.
¯
∆
i j
= −
cotβ
i j
+ cotβ
0
i j
q
|v
∗
i
||v
∗
j
|
(1)
where β
i j
and β
0
i j
are two angles opposite to edge de-
fined by vertices i and j, v
∗
refers to the circumcentric
dual of simplex v, and |.| denotes the simplex volume.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
170
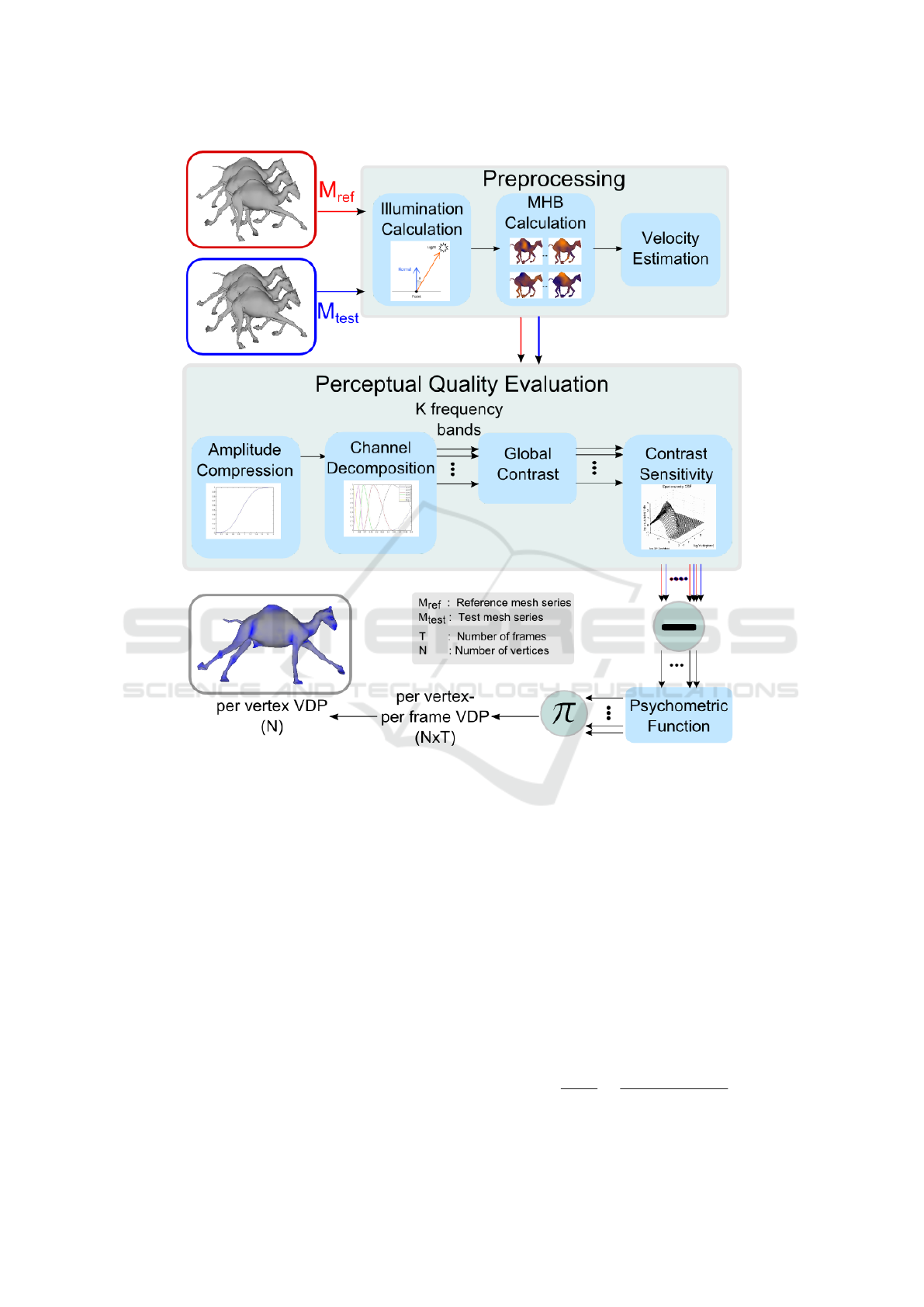
Figure 1: Method overview.
Velocity Estimation. In this step, we calculate the
velocity of each vertex at each frame and apply
smooth pursuit compensation as described in (Yildiz
and Capin, 2017). The aim of smooth pursuit com-
pensation is to handle temporal masking effect which
refers to the diminution in the visibility of distortions
as the speed of the motion increases.
3.2 Perceptual Quality Evaluation
All the steps of this method are similar to the
corresponding steps in the spatiotemporal volume
approach, except the Channel Decomposition step
which is totally different. To keep the paper
self-contained, however, all the steps are explained
shortly. Except the Channel Decomposition step, all
the steps follow the same procedures described in the
previous work, with the exception that equations are
applied per vertex instead of per voxel, since they are
not applied on the spatiotemporal volume.
Amplitude Compression. The purpose of this step
is to model the photoreceptor response to luminance
which “forms a nonlinear S-shaped curve, centered at
the current adaptation luminance and exhibits a com-
pressive behavior while moving away from the cen-
ter” (Aydin et al., 2010).
We apply the local amplitude nonlinearity model
by Daly (Daly, 1992) per vertex as in Eq. 2, where i is
the vertex index, t is the frame number, R(i,t)/R
max
is the normalized response, L(i,t) is the luminance
value of the vertex, and b = 0.63 and c
1
= 12.6 are
empirical constants.
R(i,t)
R
max
=
L(i,t)
L(i,t) + c
1
L(i,t)
b
(2)
A Fully Object-space Approach for Full-reference Visual Quality Assessment of Static and Animated 3D Meshes
171

Channel Decomposition. Our primary visual cor-
tex is known to be selective to certain spatial frequen-
cies and orientations (Aydin et al., 2010). Cortex
Transform (Daly, 1992) is commonly used for mod-
eling this visual selectivity mechanism of HVS.
The most important distinction of our approach
lies in the implementation of this step. In the Chan-
nel Decomposition step of the framework in (Yildiz
and Capin, 2017), Cortex Transform is used to filter
the spatiotemporal volume with DoM (Difference Of
Mesa) filters in the frequency domain. While convert-
ing the spatiotemporal volume to frequency domain,
Fourier Transform (FT) is used. However, FT requires
voxelization of the mesh surface. Manifold Harmon-
ics can be considered as the generalization of Fourier
analysis to surfaces of arbitrary topology (Vallet and
L
´
evy, 2008). Hence, we employ Manifold Harmon-
ics for applying DoM filter on the mesh and obtain 6
frequency channels as in the spatiotemporal volume
based approach.
In the processing pipeline of Manifold Harmon-
ics, firstly, Manifold Harmonics Basis is calculated
for the given triangle mesh of N vertices, which is al-
ready performed in the preprocessing step of our im-
plementation. Then the geometry is transformed into
frequency space by the help of Manifold Harmonics
Transform (MHT), which corresponds to projecting x
into MHB by solving for the coefficients ˜x
k
given in
Eq. 3. Frequency space filtering is performed by mul-
tiplying the coefficients calculated in MHT step by a
frequency space filter F(w) (Eq. 4). Lastly, the mesh
is transformed back to the geometric space using in-
verse Manifold Harmonics Transform (MHT
−1
). In
its simplest form, MHT
−1
is performed using Eq. 5;
however if a filtering is performed, we use Eq. 4 to
obtain filtered values denoted by x
F
i
. For a more de-
tailed explanation of MHT, please refer to (Vallet and
L
´
evy, 2008) and (Botsch et al., 2010, Chapter 4).
˜x
k
=
N
∑
i=1
x
i
D
ii
H
k
i
(3)
x
F
i
=
m
∑
k=1
F(w
k
) ˜x
k
H
k
i
(4)
x =
m
∑
k=1
˜x
k
H
k
(5)
One can discover the similarity between the process-
ing pipeline of Manifold Harmonics and frequency
domain filtering used in (Yildiz and Capin, 2017).
MHT and MHT
−1
correspond to Fourier and Inverse
Fourier Transform, respectively. We construct DoM
filters displayed in Figure 2 to be used as the fre-
quency space filters (F(w)). The equations for calcu-
lating DoM filters can be found in (Aydin et al., 2010)
and (Yildiz and Capin, 2017).
Figure 2: Difference of Mesa (DOM) filters. (x-axis: spatial
frequency in cycles/pixel, y-axis: response).
Note that the notation in Eq 3-5 was given assum-
ing that the geometry of the mesh will be filtered. It
is also possible to filter other attributes of the mesh.
For instance, for filtering the color values, we need to
replace x, y, z values with r, g, b values. In our case,
we need filtering the color values of the mesh with
DoM filters.
Figure 3 depicts the six frequency channels gen-
erated by applying Cortex Transform on an image,
while Figure 4 includes the outputs of the Channel
Decomposition step of our mesh-based approach for
the hand mesh. One can notice the parallelism be-
tween these results as the frequency decreases from
channel 1 to 6 and finer details are captured in the
high frequency bands.
Global Contrast. Contrast values in each fre-
quency band is calculated using the global contrast
definition in Eq. 6 (Myszkowski et al., 2000); as the
sensitivity to a pattern is determined by its contrast
rather than its intensity. In the equation, C
k
contains
the contrast values and I
k
contains the luminance val-
ues in channel k, respectively.
C
k
=
I
k
− mean(I
k
)
mean(I
k
)
(6)
Contrast Sensitivity. The next step is to filter each
frequency channel with the Contrast Sensitivity Func-
tion (CSF). Since our model is designed for animated
meshes, we use the spatiovelocity CSF which mea-
sures the sensitivity of HVS with respect to spatial
frequency and velocity.
Each frequency band is weighted with the spa-
tiovelocity CSF in Eq. 7 (Kelly, 1979). Inputs to the
CSF are vertex velocities in each frame and the center
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
172
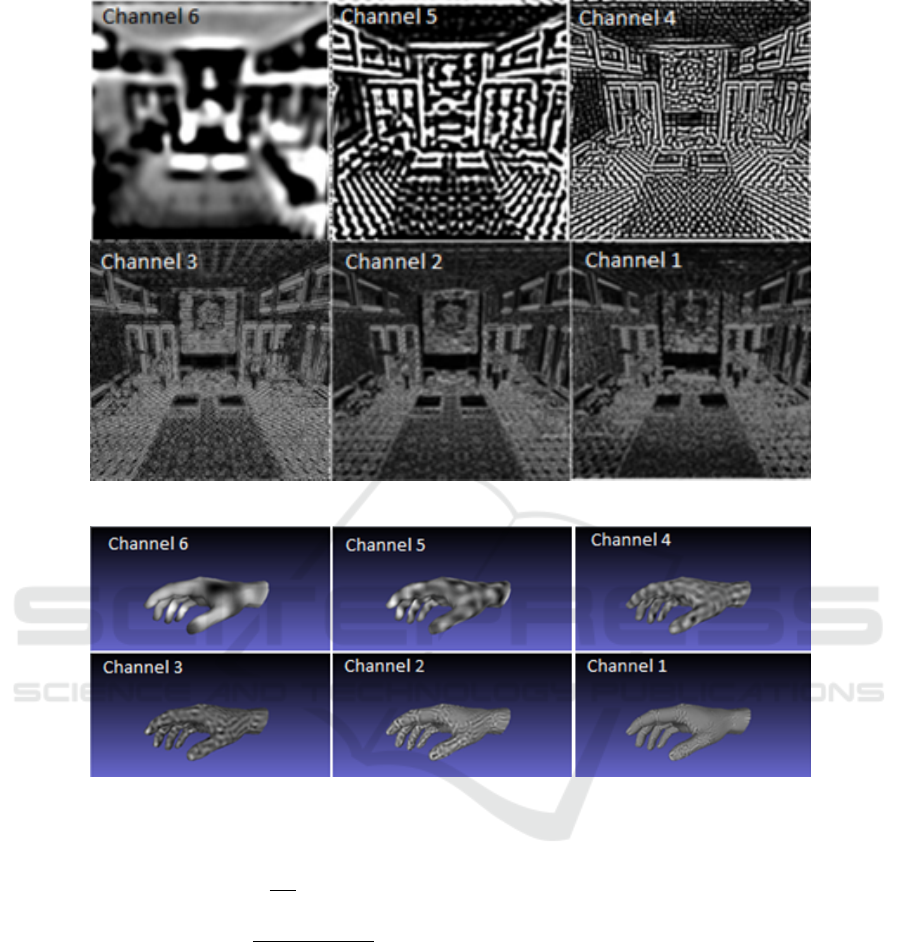
Figure 3: Application of Cortex Transform on an image (Image courtesy of Karol Myszkowski).
Figure 4: Output of the Channel Decomposition step for the hand mesh.
spatial frequency of each frequency band.
CSF(ρ,v) = c
0
(6.1 + 7.3| log(
c
2
v
3
) |
3
)×
c
2
v(2πc
1
ρ)
2
× exp(−
4πc
1
ρ(c
2
v + 2)
45.9
) (7)
where ρ is the spatial frequency in cycles/degree, v is
the velocity in degrees/second, and c
0
= 1.14, c
1
=
0.67,c
2
= 1.7 are empirically set coefficients.
Error Pooling. Both reference and test animations
go through the above steps. K frequency bands for
each sequence are generated in this pipeline. Then the
difference between test and reference pairs for each
band is passed to a psychometric function which maps
the perceived contrast (C
0
) to probability of detection
using Eq. 8 (Aydin et al., 2010). Then each band is
combined using the probability summation formula
(Eq. 9) (Aydin et al., 2010).
P(C
0
) = 1 − exp(−| C
0
|
3
) (8)
ˆ
P = 1 −
K
∏
k=1
(1 − P
k
) (9)
ˆ
P contains the detection probabilities of each vertex
per frame. We merge the probability maps of each
frame into a single map, by averaging the values of
vertices over the frames. This gives a per vertex visi-
ble difference prediction map for the animated mesh.
4 RESULTS
In this section, the performance of the proposed ap-
proach is evaluated from accuracy and processing
time perspectives, compared to other methods.
A Fully Object-space Approach for Full-reference Visual Quality Assessment of Static and Animated 3D Meshes
173

4.1 Accuracy
In this section, we evaluate the performance of our
metric compared to the state-of-the-art metrics. Our
metric is applicable on both static and dynamic
meshes and generates a 3D local distortion map.
However, most of the publicly available datasets mea-
sure the global visual quality. Therefore, we first mea-
sure the performance of our metric on detecting local
distortions using the dataset constructed by Yildiz and
Capin (Yildiz and Capin, 2017), which contains local
distortion maps for distorted animations with respect
to four reference animations. The dataset is composed
of four different mesh sequences with number of ver-
tices changing from 8K to 42K.
As the performance measurement, we use Spear-
man Rank Order Correlation Coefficient (SROCC)
between metric results and mean opinion score
(MOS) values. Table 1 lists SROCC values for both
our metric and the metric proposed in (Yildiz and
Capin, 2017).
We also compare our global metric results to the
common metric results on LIRIS/EPFL General Pur-
pose dataset (Lavou
´
e et al., 2006), which is used as
benchmark in many mesh processing studies. Table
2 includes SROCC values for each model and met-
ric. Both the local and global results show that our
mesh-based approach achieves good and almost the
same correlation values with the metric in (Yildiz and
Capin, 2017).
4.2 Processing Time
We also measured the running time of our metric
compared to the previous work (Yildiz and Capin,
2017), for several meshes. Measurements are per-
formed on a 3.3 GHz PC. As depicted from Figure 5,
running time of our algorithm is almost proportional
to the number of vertices of the mesh; which is rea-
sonable because the algorithm operates per vertex.
Note that these meshes are selected to illustrate the
dependency of the running time of the algorithm on
the number of vertices. Note also these results ignore
the preprocessing times.
We know that the running time depends on the
number of voxels for the spatiotemporal volume ap-
proach (Yildiz and Capin, 2017) and it depends on
the number of vertices in our approach. Keeping this
observation in mind, we see that the spatiotemporal
volume approach runs faster for the horse and camel
animations, although the number of vertices is less
than the number of voxels in these cases. This is due
to the domination of manifold harmonics calculations
for small meshes in our approach. However, the share
Figure 5: Processing time (in seconds) of one frame for sev-
eral meshes.
of these calculations diminishes as the number of vox-
els gets much higher than the number of vertices.
4.3 Discussion
Concisely, both approaches produce comparable re-
sults from the accuracy perspective. On the other
hand, we can deduce from the computational time
measurements that our mesh-based VQA method is
more efficient than the spatiotemporal volume-based
method for large meshes (i.e. # vertices > 25K).
Nevertheless, it is important to remind that mesh-
based approach confines the reference and test meshes
to have the same number of vertices. Thus, for
large meshes without connectivity changes, our mesh-
based approach is preferable because of its efficiency,
with the expense of Manifold Harmonics Basis calcu-
lations as a preprocessing.
It is also important to note a design issue in the
MHB calculations of our method. Calculation of the
MHBs for meshes with high number of vertices is a
problem due to its space complexity. To overcome
this problem, cotangent weight and delta matrices in
Eq. 1 are stored as sparse matrices which enables a
significant amount of reduction in the memory space.
We have also adopted the idea in (Song et al., 2014),
where eigen-decomposition is performed on the sim-
plified version of the mesh and the results are mapped
to the original mesh using a kd-tree structure, for
mesh saliency calculations. Following this process,
for large meshes (#vertices > 25K, in our implemen-
tation), the Channel Decomposition step (Section 3.2)
is applied on the simplified versions of the meshes
and the results are expanded to the original size us-
ing a kd-tree representation. For mesh simplifica-
tion, we employ the quadric edge collapse decimation
method of MeshLab’s implementation (Cignoni et al.,
2008), with boundary-preserving option is set. Al-
though the accuracy results are close to the spatiotem-
poral volume-based approach, performing MHB cal-
culations on reduced meshes may degrade the results
and further verification is required for this choice.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
174
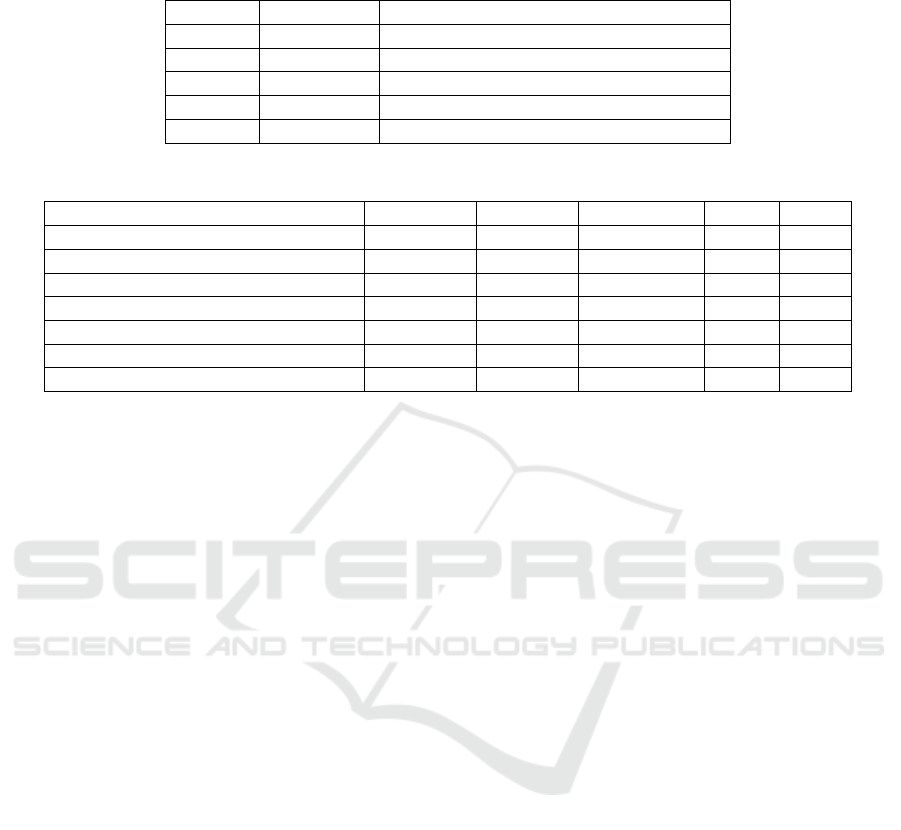
Table 1: The performance of our metric on detecting local distortions compared to the metric proposed in (Yildiz and Capin,
2017). SROCC values are given in percentages (%).
Our metric The metric in (Yildiz and Capin, 2017)
Camel 84 83
Elephant 63 65
Hand 73 71
Horse 70 70
Overall 73 72
Table 2: Spearman correlation coefficients in percentages (%) for each model and metric (highest values are marked).
Armadillo Dinosaur RockerArm Venus Mean
MSDM (Lavou
´
e et al., 2006) 84 70 88 86 82
3DWPM2 (Corsini et al., 2007) 71 47 29 26 43
3DWPM1 (Corsini et al., 2007) 64 59 85 68 69
GL1 (Karni and Gotsman, 2000) 68 5 2 91 42
GL2 (Sorkine et al., 2003) 76 22 18 89 51
Yildiz et al. (Yildiz and Capin, 2017) 86 79 88 89 86
Our metric 86 78 88 90 86
5 CONCLUSION
The aim of this paper is to provide a general-purpose
visual quality metric for estimating the local and
global distortions in both static and animated meshes.
The method extends the costly framework in (Yildiz
and Capin, 2017) to fully operate in 3D object space.
Our approach incorporates both spatial and tempo-
ral sensitivity of the HVS. The algorithm outputs a
3D probability map of visible distortions. The most
significant contribution of our method is that we em-
ploy manifold harmonics transformation to propose
a principled way for modeling the visual selectivity
mechanism of HVS on 3D surfaces. According to our
experimental evaluations, our metric gives promising
results compared to its counterparts.
Our method shares the advantages of the metric in
(Yildiz and Capin, 2017): It incorporates the effect of
temporal variations; which is omitted by most of the
studies in the literature. The algorithm can be used
for measuring the quality of both static and dynamic
meshes. In addition to these, our method is computa-
tionally more efficient in certain cases.
The main drawback of our method is the require-
ment of fixed connectivity mesh pairs. As a future
work, we intend to relax this constraint by first apply-
ing a vertex correspondence algorithm. Moreover, a
more extensive user study, considering the effects of
several parameters, is needed.
REFERENCES
Aydin, T. O.,
ˇ
Cad
´
ık, M., Myszkowski, K., and Seidel, H.-P.
(2010). Video quality assessment for computer graph-
ics applications. In ACM Transactions on Graphics
(TOG), volume 29, page 161. ACM.
Botsch, M., Kobbelt, L., Pauly, M., Alliez, P., and L
´
evy, B.
(2010). Polygon Mesh Processing. CRC press.
Bulbul, A., C¸ apin, T. K., Lavou
´
e, G., and Preda, M. (2011).
Assessing Visual Quality of 3-D Polygonal Models.
IEEE Signal Processing Magazine, 28(6):80–90.
Cignoni, P., Corsini, M., and Ranzuglia, G. (2008). Mesh-
lab: an open-source 3D mesh processing system.
ERCIM News, (73):45–46.
Corsini, M., Gelasca, E., Ebrahimi, T., and Barni, M.
(2007). Watermarked 3-D mesh quality assessment.
IEEE Transactions on Multimedia, 9(2):247–256.
Corsini, M., Larabi, M.-C., Lavou
´
e, G., Pet
ˇ
r
´
ık, O., V
´
a
ˇ
sa,
L., and Wang, K. (2013). Perceptual metrics for static
and dynamic triangle meshes. In Computer Graph-
ics Forum, volume 32, pages 101–125. Wiley Online
Library.
Daly, S. J. (1992). Visible differences predictor: an algo-
rithm for the assessment of image fidelity. In Proceed-
ings of SPIE/IS&T Symposium on Electronic Imag-
ing: Science and Technology, pages 2–15. Interna-
tional Society for Optics and Photonics.
Dong, L., Fang, Y., Lin, W., and Seah, H. S. (2015).
Perceptual quality assessment for 3D triangle mesh
based on curvature. IEEE Transactions on Multime-
dia, 17(12):2174–2184.
Karni, Z. and Gotsman, C. (2000). Spectral compression
of mesh geometry. In Proceedings of the 27th an-
nual conference on Computer graphics and interac-
tive techniques, pages 279–286. ACM Press/Addison-
Wesley Publishing Co.
A Fully Object-space Approach for Full-reference Visual Quality Assessment of Static and Animated 3D Meshes
175

Kelly, D. (1979). Motion and vision. ii. stabilized spatio-
temporal threshold surface. Journal of the Optical So-
ciety of America, 69(10):1340–1349.
Lavou
´
e, G. (2011). A multiscale metric for 3D mesh vi-
sual quality assessment. In Computer Graphics Fo-
rum, volume 30, pages 1427–1437. Wiley Online Li-
brary.
Lavou
´
e, G., Gelasca, E. D., Dupont, F., Baskurt, A., and
Ebrahimi, T. (2006). Perceptually driven 3D distance
metrics with application to watermarking. In Optics &
Photonics, pages 63120L–63120L. International So-
ciety for Optics and Photonics.
Lavou
´
e, G. and Mantiuk, R. (2015). Quality assessment in
computer graphics. In Visual Signal Quality Assess-
ment, pages 243–286. Springer.
Lin, W. and Jay Kuo, C.-C. (2011). Perceptual visual qual-
ity metrics: A survey. Journal of Visual Communica-
tion and Image Representation, 22(4):297–312.
Myszkowski, K., Rokita, P., and Tawara, T. (2000).
Perception-based fast rendering and antialiasing of
walkthrough sequences. IEEE Transactions on Visu-
alization and Computer Graphics, 6(4):360–379.
Ramanarayanan, G., Ferwerda, J., Walter, B., and Bala,
K. (2007). Visual equivalence: towards a new stan-
dard for image fidelity. In Proceedings of ACM
SIGGRAPH, SIGGRAPH ’07, New York, NY, USA.
ACM.
Singh, S. and Kumar, S. (2017). A pipeline and met-
ric for validation of personalized human body mod-
els. In Proceedings of the 12th International Joint
Conference on Computer Vision, Imaging and Com-
puter Graphics Theory and Applications - Volume
1: GRAPP, (VISIGRAPP 2017), pages 160–171. IN-
STICC, SciTePress.
Song, R., Liu, Y., Martin, R. R., and Rosin, P. L. (2014).
Mesh saliency via spectral processing. ACM Transac-
tions on Graphics (TOG), 33(1):6.
Sorkine, O., Cohen-Or, D., and Toledo, S. (2003). High-
pass quantization for mesh encoding. In Symposium
on Geometry Processing, pages 42–51. Citeseer.
Torkhani, F., Wang, K., and Chassery, J.-M. (2014). A
curvature-tensor-based perceptual quality metric for
3D triangular meshes. Machine Graphics and Vision,
23(1-2):59–82.
Vallet, B. and L
´
evy, B. (2008). Spectral geometry process-
ing with manifold harmonics. Computer Graphics Fo-
rum, 27(2):251–260.
Wang, K., Torkhani, F., and Montanvert, A. (2012). A
fast roughness-based approach to the assessment of
3D mesh visual quality. Computers & Graphics,
36(7):808–818.
Yildiz, Z. C. and Capin, T. (2017). A perceptual quality
metric for dynamic triangle meshes. EURASIP Jour-
nal on Image and Video Processing, 2017(1):12.
Yildiz, Z. C., Oztireli, A. C., and Capin, T. (2018). A ma-
chine learning framework for full-reference 3d shape
quality assessment. The Visual Computer.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
176
