
Optical Flow Augmented Semantic Segmentation Networks
for Automated Driving
Hazem Rashed
1
, Senthil Yogamani
2
, Ahmad El-Sallab
1
, Pavel K
ˇ
r
´
ı
ˇ
zek
3
and Mohamed El-Helw
4
1
CDV AI Research, Cairo, Egypt
2
Valeo Vision Systems, Ireland
3
Valeo R&D DVS, Prague, Czech Republic
4
Nile University, Cairo, Egypt
Keywords:
Semantic Segmentation, Visual Perception, Dense Optical Flow, Automated Driving.
Abstract:
Motion is a dominant cue in automated driving systems. Optical flow is typically computed to detect moving
objects and to estimate depth using triangulation. In this paper, our motivation is to leverage the existing
dense optical flow to improve the performance of semantic segmentation. To provide a systematic study, we
construct four different architectures which use RGB only, flow only, RGBF concatenated and two-stream
RGB + flow. We evaluate these networks on two automotive datasets namely Virtual KITTI and Cityscapes
using the state-of-the-art flow estimator FlowNet v2. We also make use of the ground truth optical flow in
Virtual KITTI to serve as an ideal estimator and a standard Farneback optical flow algorithm to study the
effect of noise. Using the flow ground truth in Virtual KITTI, two-stream architecture achieves the best results
with an improvement of 4% IoU. As expected, there is a large improvement for moving objects like trucks,
vans and cars with 38%, 28% and 6% increase in IoU. FlowNet produces an improvement of 2.4% in average
IoU with larger improvement in the moving objects corresponding to 26%, 11% and 5% in trucks, vans and
cars. In Cityscapes, flow augmentation provided an improvement for moving objects like motorcycle and train
with an increase of 17% and 7% in IoU.
1 INTRODUCTION
Semantic image segmentation has witnessed tremen-
dous progress recently with deep learning. It provi-
des dense pixel-wise labeling of the image which le-
ads to scene understanding. Automated driving is one
of the main application areas where it is commonly
used (Horgan et al., 2015). The level of maturity in
this domain has rapidly grown recently and the com-
putational power of embedded systems have increa-
sed as well to enable commercial deployment. Cur-
rently, the main challenge is the cost of constructing
large datasets as pixel-wise annotation is very labor
intensive. It is also difficult to perform corner case
mining as it is a unified model to detect all the ob-
jects in the scene. Thus there is a lot of research to
reduce the sample complexity of segmentation net-
works by incorporating domain knowledge and other
cues where-ever possible. In this work, we explore
the usage of motion cues via dense optical flow to im-
prove the accuracy.
Majority of semantic segmentation algorithms
mainly rely on appearance cues based on a single
image and do not exploit motion cues from two con-
secutive images. In this paper, we address the usage
of dense optical flow as a motion cue in semantic seg-
mentation networks. In particular for automotive sce-
nes, the scene is typically split into static infrastruc-
ture and set of independently moving objects. Motion
cues which needs two consecutive frames could parti-
cularly improve the segmentation of moving objects.
The contributions of this work include:
• Construction of four CNN architectures to syste-
matically study the effect of optical flow augmen-
tation to semantic segmentation.
• Experimentation on two automotive datasets na-
mely Virtual KITTI and Cityscapes.
• Ablation study on using different flow estimators
and different flow representations.
The rest of the paper is organized as follows:
Section 2 reviews the related work in segmentation,
computation of flow and role of flow in semantic
segmentation. Section 3 details the construction of
Rashed, H., Yogamani, S., El-Sallab, A., K
ˇ
rížek, P. and El-Helw, M.
Optical Flow Augmented Semantic Segmentation Networks for Automated Driving.
DOI: 10.5220/0007248301650172
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 165-172
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
165

four architectures to systematically study the effect of
augmenting flow to semantic segmentation networks.
Section 4 discusses the experimental results in Vir-
tual KITTI and Cityscapes. Finally, section 5 provi-
des concluding remarks.
2 RELATED WORK
2.1 Semantic Segmentation
A detailed survey of semantic segmentation for au-
tomated driving is presented in (Siam et al., 2017a).
We briefly summarize the relevant parts focused on
CNN based methods which are split into mainly three
subcategories. The first (Farabet et al., 2013) used
patch-wise training to yield the final classification.
In(Farabet et al., 2013) an image is fed into a Lap-
lacian pyramid, each scale is forwarded through a
3-stage network to extract hierarchical features and
patch-wise classification is used. The output is post
processed with a graph based classical segmentation
method. In (Grangier et al., 2009) a deep network was
used for the final pixel-wise classification to alleviate
any post processing needed. However, it still utilized
patch-wise training.
The second subcategory (Long et al., 2015)(Noh
et al., 2015)(Badrinarayanan et al., 2015) was focu-
sed on end-to-end learning of pixel-wise classifica-
tion. It started with the work in (Long et al., 2015)
that developed fully convolutional networks (FCN).
The network learned heatmaps that was then upsam-
pled with-in the network using deconvolution to get
dense predictions. Unlike patch-wise training met-
hods this method uses the full image to infer dense
predictions. In (Noh et al., 2015) a deeper deconvo-
lution network was developed, in which stacked de-
convolution and unpooling layers are used. In Seg-
net (Badrinarayanan et al., 2015) a similar approach
was used where an encoder-decoder architecture was
deployed. The decoder network upsampled the fea-
ture maps by keeping the maxpooling indices from
the corresponding encoder layer.
2.2 Optical Flow in Automated Driving
Systems
Flow estimation is very critical for automated driving
and it has been a standard module for more than ten
years. Due to computational restriction, sparse op-
tical flow was used and it is replaced by Dense Op-
tical Flow (DOF) in recent times. As flow is alre-
ady computed, it can be leveraged for semantic seg-
mentation. Motion estimation is a challenging pro-
blem because of the continuous camera motion al-
ong with the motion of independent objects. Mo-
ving objects are the most critical in terms of avoi-
ding fatalities and enabling smooth maneuvering and
braking of the car. Motion cues can also enable ge-
neric object detection as it is not possible to train
for all possible object categories beforehand. Clas-
sical approaches in motion detection were focused
on geometry based approaches (Torr, 1998)(Papazo-
glou and Ferrari, 2013)(Ochs et al., 2014)(Menze and
Geiger, 2015)(Wehrwein and Szeliski, 2017). Howe-
ver, pure geometry based approaches have many li-
mitations, motion parallax issue is one such exam-
ple. A recent trend (Tokmakov et al., 2016)(Jain
et al., 2017)(Drayer and Brox, 2016)(Vijayanarasim-
han et al., 2017)(Fragkiadaki et al., 2015) for learning
motion in videos has emerged. CNN based optical
flow has produced state of the art results. FlowNet
(Ilg et al., 2016) was a simple two stream structure
which was trained on synthetic data.
There has been many attempts to combine appea-
rance and motion cues for various tasks. Jain et. al.
presented a method for appearance and motion fusion
in (Jain et al., 2017) for generic foreground object
segmentation. Laura et. al. (Sevilla-Lara et al., 2016)
leverages semantic segmentation for customizing mo-
tion model for various objects. This has been com-
monly used in scene flow models. Junhwa et. al (Hur
and Roth, 2016) uses optical flow to provide tempo-
rally consistent semantic segmentation via post pro-
cessing. MODNet (Siam et al., 2017b) fuses optical
flow and RGB images for moving object detection.
FuseNet (Hazirbas et al., 2016) is the closest to the
work in this paper where they augmented semantic
segmentation networks with depth. They show that
concatenation of RGBD slightly reduces mean IoU
and two-stream network with cross links show an im-
provement of 3.65 % IoU in SUN RBG-D dataset.
Motion is a complementary cue of color and its role
is relatively less explored for semantic segmentation.
Our motivation is to construct simple baseline archi-
tectures which can be built on top of current CNN ba-
sed semantic segmentation. More sophisticated flow
augmentation architectures were proposed in (Nilsson
and Sminchisescu, 2016) and (Gadde et al., 2017), ho-
wever they are computationally more intensive.
3 SEMANTIC SEGMENTATION
MODELS
In this section, we discuss the details of the four diffe-
rent semantic segmentation networks used in this pa-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
166

per. We construct two flow augmented architectures
namely RGBF network (Figure 1 (c)) which does con-
catenation and two-stream RGB+F network (Figure 1
(d)). RGB only and flow only architectures serve as
baselines for comparative analysis.
(a) Input RGB
(b) Input Flow
(c) Input RGBF
(d) Two Stream RGB+F
Figure 1: Four types of architectures constructed and tested
in the paper. (a) and (b) are baselines using RGB and Flow
only. (c) and (d) are flow augmented semantic segmentation
architectures.
Table 1: Quantitative evaluation on Virtual KITTI data for
our four segmentation networks.
Network Type IoU Precision Recall F-Score
RGB 66.47 78.23 75.6 73.7
F 42 63.92 55.28 55.76
RGBF (concat) 65.33 82.37 73.77 75.85
RGB + F (2-stream add) 70.52 83 76.4 78.9
3.1 One-stream Networks
An encoder-decoder architecture is used for perfor-
ming semantic segmentation. Our network is ba-
sed on FCN8s (Long et al., 2015) architecture, af-
ter which the remaining fully connected layers of the
VGG16 are transformed to a fully convolutional net-
work. The first 15 convolutional layers are used for
feature extraction. The segmentation decoder follows
the FCN architecture. 1x1 convolutional layer is used
followed by three transposed convolution layers to
perform up-sampling. Skip connections are utilized to
extract high resolution features from the lower layers
and then the extracted features are added to the par-
tially upsampled results. The exact same one stream
architecture is used for both RGB-only and flow-only
experiments. We use the cross-entropy loss function
as shown below. where q denotes predictions and p
denotes ground-truth. C
Dataset
is the set of classes for
the used dataset.
3.2 RGBF Network
The input to this network is a 3D volume containing
the original RGB image concatenated with the flow
map. Several optical flow representations have been
studied experimentally to find the best performing in-
put, namely Color wheel representation in 3 channels,
magnitude and direction in 2 channels, and magni-
tude only in 1 channel. It was found that an input of
4 channels containing RGB image concatenated with
optical flow magnitude performs the best (Refer to Ta-
ble 2 and 3). The flow map is normalized from 0 to
255 to have the same value range as the RGB. The
first layer of the VGG is adapted to use the input of
four channels and the corresponding weights are ini-
tialized randomly. The rest of the network utilizes the
VGG pre-trained weights. In case of Virtual KITTI,
we make use of flow ground truth as one of the in-
puts. This is done to simulate a near-perfect flow esti-
mator which can be achieved by state-of-the-art CNN
based algorithms and eliminate the variability due to
estimation errors. In case of cityscapes, we make use
of OpenCV Farneback function where the magnitude
of the flow vectors are computed as
√
u
2
+ v
2
where
u and v are the horizontal and vertical flow vectors
output from the function. The magnitude is then nor-
malized to 0-255. In both the datasets, we also make
use of the state-of-the-art flow estimator FlowNet v2
(Ilg et al., 2017).
3.3 Two Stream (RGB+F) Network
Inspired from (Simonyan and Zisserman, 2014)(Jain
et al., 2017)(Siam et al., 2017b), we construct a two
stream network which utilizes two parallel VGG16
encoders to extract appearance and flow features se-
parately. The feature maps from both streams are fu-
sed together using summation junction producing en-
coded features of same dimensions. Then the same
decoder described in the one-stream network is used
to perform upsampling. Following the same approach
as the one-stream network, skip connections are used
to benefit from the high resolution feature maps. This
network produces the best performance among the
four as discussed in the experiments section. Howe-
ver, the two stream network is computationally more
complex with more parameters relative to the RGBF
network. The main difference is the fusion at the en-
coder stage rather than early fusion in RGBF network.
Optical Flow Augmented Semantic Segmentation Networks for Automated Driving
167
Table 2: Semantic Segmentation Results on Virtual Kitti (Mean IoU) for different DOF (GT) representations.
Type Mean Truck Car Van Road Sky Vegetation Building Guardrail TrafficSign TrafficLight Pole
RGBF (GT-Color Wheel) 59.88 41.7 84.44 40.74 93.76 93.6 66.3 49.43 52.18 61.21 49.61 21.52
RGBF (GT-Mag & Dir) 58.82 45.12 82.3 30.04 90.25 94.1 60.97 56.48 51.48 58.74 49.7 26.01
RGBF (GT-Mag only) 65.32 70.73 80.16 48.33 93.59 93.3 70.79 62.04 67.86 55.13 55.48 31.92
RGB+F (GT-3 layers Mag only) 67.88 35.7 91.02 24.78 96.47 94.06 88.72 74.4 84.5 69.48 68.95 34.28
RGB+F (GT-Color Wheel) 70.52 71.79 91.4 56.8 96.19 93.5 83.4 66.53 82.6 64.69 64.65 26.6
Table 3: Semantic Segmentation Results (Mean IoU) on CityScapes for different DOF (Farneback) representations.
Type Mean Bicycle Person Rider Motorcycle Bus Car Train Building Road Truck Sky TrafficSign
RGBF (Mag only) 47.8 52.63 55.82 31.08 22.38 39.34 82.75 22.8 80.43 92.24 20.7 81.87 44.08
RGBF (Mag & Dir) 54.6 57.28 58.63 33.56 18.49 56.44 87.6 41.15 84.41 95.4 31.8 87.86 44.26
RGBF (Color Wheel) 57.2 61.47 62.18 35.13 22.68 54.87 87.45 36.69 86.28 95.94 40.2 90.07 51.64
RGB+F (3 layers Mag only) 62.1 65.15 65.44 32.59 33.19 63.07 89.48 43.6 87.88 96.17 57.2 91.48 55.76
RGB+F (Color Wheel) 62.56 63.65 66.3 39.65 47.22 66.24 89.63 51.02 87.13 96.4 36.11 90.64 60.68
Table 4: Semantic Segmentation Results (Mean IoU) on Virtual KITTI dataset.
Type Mean Truck Car Van Road Sky Vegetation Building Guardrail TrafficSign TrafficLight Pole
RGB 66.47 33.66 85.69 29.04 95.91 93.91 80.92 68.15 81.82 66.01 65.07 40.91
F (GT) 42 36.2 55.2 20.7 62.6 93.9 19.54 34 15.23 51.5 33.2 29.3
RGBF (GT) 65.328 70.74 80.2 48.34 93.6 93.3 70.79 62.05 67.86 55.14 55.48 31.9
RGB+F (GT) 70.52 71.79 91.4 56.8 96.19 93.5 83.4 66.53 82.6 64.69 64.65 26.6
F (Flownet) 28.6 24.6 47.8 14.3 57.9 68 13.4 4.9 0.8 31.8 18.5 6.6
RGB+F (Flownet) 68.84 60.05 90.87 40.54 96.05 91.73 84.54 68.52 82.43 65.2 63.54 26.54
Table 5: Semantic Segmentation Results (Mean IoU) on Cityscapes dataset.
Type Mean Bicycle Person Rider Motorcycle Bus Car Train Building Road Truck Sky TrafficSign
RGB 62.47 63.52 67.93 40.49 29.96 62.13 89.16 44.19 87.86 96.22 48.54 89.79 59.88
F (Farneback) 34.7 34.48 37.9 12.7 7.39 31.4 74.3 11.35 72.77 91.2 19.42 79.6 11.4
RGBF (Farneback) 47.8 52.6 55.8 31.1 22.4 39.34 82.75 22.8 80.43 92.24 20.7 81.87 44.08
RGB+F (Farneback) 62.56 63.65 66.3 39.65 47.22 66.24 89.63 51.02 87.13 96.4 36.1 90.64 60.68
F (Flownet) 36.8 32.9 50.9 26.8 5.12 25.99 75.29 15.1 65.16 90.75 25.46 50.16 29.14
RGBF (Flownet) 52.3 54.9 58.9 34.8 26.1 53.7 83.6 40.7 79.4 94 28.1 79.4 45.5
RGB+F (Flownet) 62.43 64.2 66.32 40.9 40.76 66.05 90.03 41.3 87.3 95.8 54.7 91.07 58.21
RGB+F network also has the advantage of being able
to re-use pre-trained image encoders as it is decoupled
from flow.
4 EXPERIMENTS
In this section, we present the datasets used, experi-
mental setup and results.
4.1 Datasets
We had the following criteria for choosing the seman-
tic segmentation datasets for our experiments. Fir-
stly, the dataset has to be for automotive road sce-
nes as our application is focused on automated dri-
ving. Secondly, we needed a mechanism to have
the previous image for computational of optical flow.
We chose two datasets namely Virtual KITTI (Gai-
don et al., 2016) and Cityscapes (Cordts et al., 2016)
datasets which satisfy the above criteria. Cityscapes
is a popular automotive semantic segmentation data-
set developed by Daimler. It comprises of 5000 ima-
ges having full semantic segmentation annotation and
20,000 images with coarse annotations. We only use
the fine annotations in our experiment and evaluated
performance on the validation set that comprises of
500 images. We also chose Virtual KITTI dataset for
obtaining ground truth for flow which can be used as
a proxy for a perfect flow estimator. It is a synthe-
tic dataset that consists of 21,260 frames generated
using Unity game engine in urban environment un-
der different weather conditions. Virtual KITTI provi-
des many annotations of which two are utilized in our
approach namely dense flow and semantic segmenta-
tion. We split the dataset into 80% training data and
20% testing data. The semantic information is given
for 14 classes including static and moving objects.
4.2 Experimental Setup
For all experiments, Adam optimizer is used with a
learning rate of 1e
−5
. L2 regularization is used in
the loss function with a factor of value of 5e
−4
to
avoid over-fitting the data. The encoder is initialized
with VGG pre-trained weights on ImageNet. Dropout
with probability 0.5 is utilized for 1x1 convolutional
layers. Input image resolution of 375x1242 is used
for Virtual KITTI and 1024x2048 is used for Citysca-
pes which is downsized to 512x1024 during training.
Intersection over Union (IoU) is used as the perfor-
mance metric for each class separately and an average
IoU is computed over all the classes. In addition to
IoU, precision, recall and F-score were calculated for
Virtual KITTI dataset.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
168

4.3 Experimental Results
We provide several tables of qualitative evaluation on
the two datasets and discuss the impact of various
classes due to flow augmentation. We also provide
video links on outputs of the four architectures on test
sequences in both datasets. In case of Virtual KITTI,
we use the synthetic flow annotation as input. This is
used to simulate a perfect flow estimator so that it can
act as a best case baseline. Then it is compared with
FlowNet v2 algorithm. In case of Cityscapes, we use
a commonly used dense optical flow estimation algo-
rithm namely Farneback’s algorithm in OpenCV 3.1
with default parameters. We intentionally use this al-
gorithm to understand the effects of relatively noisy
flow estimations and compare it with FlowNet v2.
Table 1 shows the evaluation of our four architec-
tures on Virtual KITTI dataset with different metrics.
Flow augmentation consistently provides impro-
vement in all four metrics. There is an improvement
of 4% in IoU, 4.3% in Precision, 4.36% in Recall and
5.89% in F-score. Tables 2 and 3 shows a quantitative
comparison of different DOF representations in
RGBF and RGB+F architectures for both VKITTI
and Cityscapes datasets. Results show that Color
Wheel based representation in RGB+F architecture
provides the best capability of capturing the motion
cues and thus the best semantic segmentation accu-
racy. For all the following experiments, we make use
of Color Wheel representation format for flow.
Table 4 shows detailed evaluation for each class
separately. Although the overall improvement is in-
cremental, there is a large improvement for certain
classes, for example, trucks, van, car show an impro-
vement of 38.14%, 27.8% and 5.8% respectively. Ta-
ble 5 shows the evaluation of our proposed algorithm
on Cityscapes dataset and shows a marginal impro-
vement of 0.1% in overall IoU. However there is a
significant improvement in moving object classes like
motorcycle and train by 17% and 7% even using noisy
flow maps. It is important to note here that the average
IoU is dominated by road and sky pixels as there is no
pixel frequency based normalization and the obtained
improvement in moving object classes is still signi-
ficant. Figure 2 and Figure 3 illustrates qualitative
results of the four architectures on Virtual KITTI and
Cityscapes respectively. Figure 2 (f) shows better de-
tection of the van which has a uniform texture and
flow cue has helped to detect it better. Figure 2 (h)
shows that flownet provides good segmentation for
the moving van, however fusion in Figure 2 (i) still
needs to be improved. Figure 3 (f) and (h) illustrate
better detection of the bicycle and the cyclist after
augmenting DOF. These examples visually verify the
accuracy improvement obtained as shown in Table 4
and Table 5. Unexpectedly, Table 5 shows that Far-
neback and FlowNet v2 provides similar results, ho-
wever FlowNet shows better results for some classes
like Truck. One of the design goals in this work is
to have a computationally efficient model, our most
complex architecture namely RGB+F runs at 4 fps
on a TitanX Maxwell architecture GPU. Autonomous
driving systems need real-time performance and bet-
ter run-time can be obtained by using a more efficient
encoder instead of the standard encoder we used in
our experiments.
Semantic segmentation results in test sequences of
both datasets for all the four architectures along with
ground truth and original images are shared publicly
in YouTube. The Virtual KITTI results are available
in
1
and Cityscapes results are available in
2
. We in-
cluded flow only network to conduct an ablation study
to understand what performance flow alone can pro-
duce. To our surprise, it produces good results espe-
cially for road, vegetation, vehicles and pedestrians.
We noticed that there is degradation of accuracy re-
lative to RGB baseline whenever there is noisy flow.
It would be interesting to incorporate a graceful de-
gradation via a loose coupling of flow in the network.
In spite of flow only network showing good perfor-
mance, the joint network only shows incremental im-
provement. It is likely that the simple networks we
constructed do not effectively combine flow and RGB
as they are completely different modalities with dif-
ferent properties. It could also be possible that the
RGB only network is implicitly learning geometric
flow cues. In our future work, we plan to understand
this better and construct better multi-modal architec-
tures to effectively combine color and flow.
4.4 Future Work
The scope of this work is to construct simple archi-
tectures to demonstrate the benefit of flow augmen-
tation to standard CNN based semantic segmentation
networks. The improvement in accuracy obtained and
visual verification of test sequences shows that there
is still a lot of scope for improvement. Flow and co-
lor are different modalities and an explicit synergistic
model would probably produce better results compa-
red to learning their relationships from data. We sum-
marize the list of future work below:
(1) Understand the effect of different encoders of va-
rying complexity like Resnet-10, Resnet-101, etc.
1
https://youtu.be/4M1lS2-2w5U
2
https://youtu.be/VtFLpklatrQ
Optical Flow Augmented Semantic Segmentation Networks for Automated Driving
169
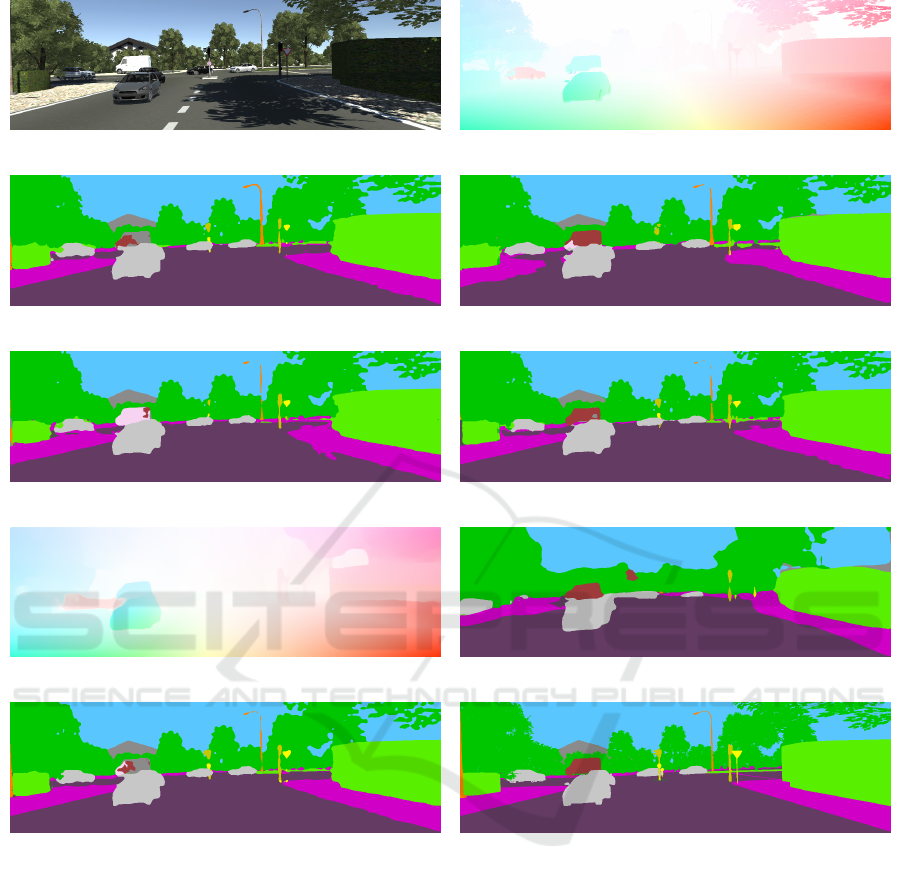
(a) Input Image (b) Input DOF (Ground Truth)
(c) RGB only (d) Flow only (Ground Truth)
(e) RGBF (Ground Truth) (f) RGB + F (Ground Truth)
(g) Input DOF ( FlowNet) (h) Flow only ( FlowNet)
(i) RGB+F ( FlowNet) (j) Ground Truth
Figure 2: Qualitative comparison of semantic segmentation outputs from four architectures on Virtual KITTI dataset.
(2) Evaluation of state-of-the-art CNN based flow es-
timators and joint multi-task learning.
(3) Construction of better multi-modal fusion archi-
tectures.
(4) Auxiliary loss induced flow feature learning in se-
mantic segmentation architecture.
(5) Incorporating sparsity invariant metrics to handle
missing flow estimates.
5 CONCLUSION
In this paper, we explored the problem of leveraging
flow in semantic segmentation networks. In applica-
tions like automated driving, flow is already compu-
ted in geometric vision pipeline and can be utilized.
We constructed four variants of semantic segmenta-
tion networks which use RGB only, flow only, RGBF
concatenated and two-stream RGB and flow. We eva-
luated these networks on two automotive datasets na-
mely Virtual KITTI and Cityscapes. We provided
class-wise accuracy scores and discussed them quali-
tatively. The simple flow augmentation architectures
demonstrate a good improvement for moving object
classes which are important for automated driving.
We hope that this study encourages further research
in construction of better flow-aware networks to fully
utilize its complementary nature.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
170
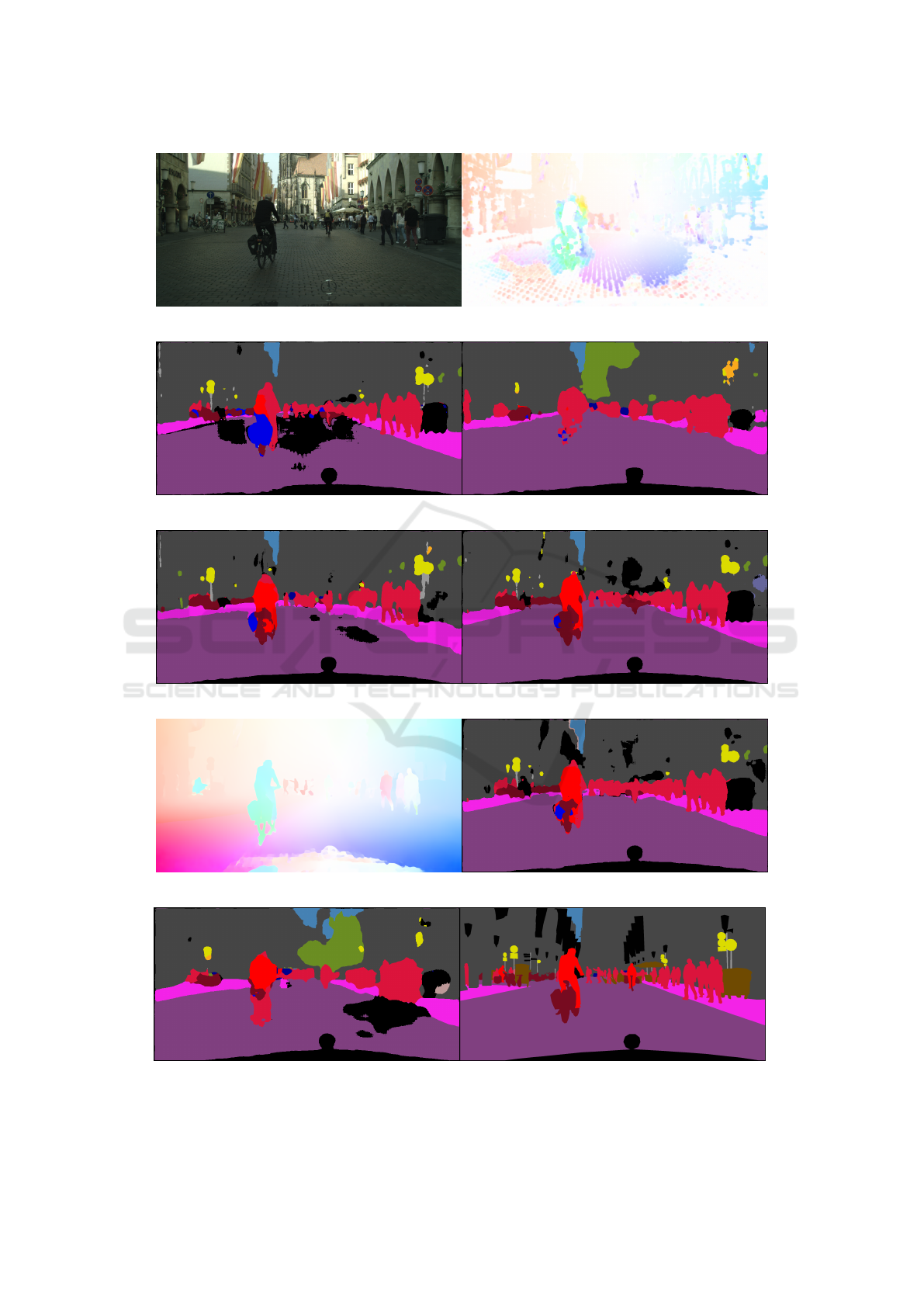
(a) Input Image (b) Input DOF (Farneback)
(c) RGB only output (d) Flow only (Farneback)
(e) RGBF output (Farneback) (f) RGB + F (Farneback)
(g) Input DOF ( FlowNet)
(h) RGB + F ( FlowNet)
(i) DOF only (FlowNet)
(j) Ground Truth
Figure 3: Qualitative comparison of semantic segmentation outputs from four architectures on Cityscapes dataset.
Optical Flow Augmented Semantic Segmentation Networks for Automated Driving
171

REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2015).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. arXiv preprint
arXiv:1511.00561.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzwei-
ler, M., Benenson, R., Franke, U., Roth, S., and
Schiele, B. (2016). The cityscapes dataset for se-
mantic urban scene understanding. arXiv preprint
arXiv:1604.01685.
Drayer, B. and Brox, T. (2016). Object detection, tracking,
and motion segmentation for object-level video seg-
mentation. arXiv preprint arXiv:1608.03066.
Farabet, C., Couprie, C., Najman, L., and LeCun, Y.
(2013). Learning hierarchical features for scene labe-
ling. IEEE transactions on pattern analysis and ma-
chine intelligence, 35(8):1915–1929.
Fragkiadaki, K., Arbelaez, P., Felsen, P., and Malik, J.
(2015). Learning to segment moving objects in vi-
deos. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 4083–
4090.
Gadde, R., Jampani, V., and Gehler, P. V. (2017). Seman-
tic video cnns through representation warping. CoRR,
abs/1708.03088, 8:9.
Gaidon, A., Wang, Q., Cabon, Y., and Vig, E. (2016). Vir-
tual worlds as proxy for multi-object tracking analy-
sis. In CVPR.
Grangier, D., Bottou, L., and Collobert, R. (2009). Deep
convolutional networks for scene parsing. In ICML
2009 Deep Learning Workshop, volume 3. Citeseer.
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2016). Fusenet: Incorporating depth into semantic
segmentation via fusion-based cnn architecture. In
Asian Conference on Computer Vision, pages 213–
228. Springer.
Horgan, J., Hughes, C., McDonald, J., and Yogamani, S.
(2015). Vision-based driver assistance systems: Sur-
vey, taxonomy and advances. In Intelligent Transpor-
tation Systems (ITSC), 2015 IEEE 18th International
Conference on, pages 2032–2039. IEEE.
Hur, J. and Roth, S. (2016). Joint optical flow and tem-
porally consistent semantic segmentation. In Euro-
pean Conference on Computer Vision, pages 163–177.
Springer.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2016). Flownet 2.0: Evolution of optical
flow estimation with deep networks. arXiv preprint
arXiv:1612.01925.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2017). Flownet 2.0: Evolution of op-
tical flow estimation with deep networks. In IEEE
conference on computer vision and pattern recogni-
tion (CVPR), volume 2, page 6.
Jain, S. D., Xiong, B., and Grauman, K. (2017). Fusion-
seg: Learning to combine motion and appearance for
fully automatic segmention of generic objects in vi-
deos. arXiv preprint arXiv:1701.05384.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 3431–3440.
Menze, M. and Geiger, A. (2015). Object scene flow for au-
tonomous vehicles. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 3061–3070.
Nilsson, D. and Sminchisescu, C. (2016). Semantic vi-
deo segmentation by gated recurrent flow propagation.
arXiv preprint arXiv:1612.08871, 2.
Noh, H., Hong, S., and Han, B. (2015). Learning deconvo-
lution network for semantic segmentation. In Procee-
dings of the IEEE International Conference on Com-
puter Vision, pages 1520–1528.
Ochs, P., Malik, J., and Brox, T. (2014). Segmentation of
moving objects by long term video analysis. IEEE
transactions on pattern analysis and machine intelli-
gence, 36(6):1187–1200.
Papazoglou, A. and Ferrari, V. (2013). Fast object segmen-
tation in unconstrained video. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 1777–1784.
Sevilla-Lara, L., Sun, D., Jampani, V., and Black, M. J.
(2016). Optical flow with semantic segmentation and
localized layers. In Proceedings of the IEEE Confe-
rence on Computer Vision and Pattern Recognition,
pages 3889–3898.
Siam, M., Elkerdawy, S., Jagersand, M., and Yogamani, S.
(2017a). Deep semantic segmentation for automated
driving: Taxonomy, roadmap and challenges. arXiv
preprint arXiv:1707.02432.
Siam, M., Mahgoub, H., Zahran, M., Yogamani, S., Ja-
gersand, M., and El-Sallab, A. (2017b). Modnet:
Moving object detection network with motion and
appearance for autonomous driving. arXiv preprint
arXiv:1709.04821.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
In Advances in neural information processing sys-
tems, pages 568–576.
Tokmakov, P., Alahari, K., and Schmid, C. (2016). Le-
arning motion patterns in videos. arXiv preprint
arXiv:1612.07217.
Torr, P. H. (1998). Geometric motion segmentation and mo-
del selection. Philosophical Transactions of the Royal
Society of London A: Mathematical, Physical and En-
gineering Sciences, 356(1740):1321–1340.
Vijayanarasimhan, S., Ricco, S., Schmid, C., Sukthankar,
R., and Fragkiadaki, K. (2017). Sfm-net: Learning
of structure and motion from video. arXiv preprint
arXiv:1704.07804.
Wehrwein, S. and Szeliski, R. (2017). Video segmentation
with background motion models. In BMVC.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
172
