
Superpixel-wise Assessment of Building Damage from Aerial Images
Lukas Lucks, Dimitri Bulatov, Ulrich Th
¨
onnessen and Melanie B
¨
oge
Fraunhofer Institute of Optronics, System Technologies and Image Exploitation
Gutleuthausstr. 1, 76275 Ettlingen, Germany
Keywords:
Damage Detection, Superpixels, Feature Extraction, Random Forest, Classification.
Abstract:
Surveying buildings that are damaged by natural disasters, in particular, assessment of roof damage, is chal-
lenging, and it is costly to hire loss adjusters to complete the task. Thus, to make this process more feasible,
we developed an automated approach for assessing roof damage from post-loss close-range aerial images and
roof outlines. The original roof area is first delineated by aligning freely available building outlines. In the
next step, each roof area is decomposed into superpixels that meet conditional segmentation criteria. Then,
52 spectral and textural features are extracted to classify each superpixel as damaged or undamaged using a
Random Forest algorithm. In this way, the degree of roof damage can be evaluated and the damage grade
can be computed automatically. The proposed approach was evaluated in trials with two datasets that differed
significantly in terms of the architecture and degree of damage. With both datasets, an assessment accuracy of
about 90% was attained on the superpixel level for roughly 800 buildings.
1 INTRODUCTION
According to the United States National Centers
for Environmental Information (NCEI) and National
Oceanic and Atmospheric Administration (NOAA),
2017 was the most expensive year of losses since
1980
1
. A total of 16 weather and climate disaster
events caused US$ 306.2 billion of damage that had
to be covered by insurance companies. In many cases,
handling insurance claims and carrying out loss adjus-
tment is sometimes more expensive than the loss it-
self. A loss adjuster has to be routed through a dama-
ged city to reach each building in a portfolio. Depen-
ding on the severity of the natural disaster, the degree
of urbanization, and the development of the area, it
sometimes takes weeks to locate an insured building.
Then, to identify the roof damage, the loss adjuster
usually has to climb onto the roof; this tends to be a
bottleneck in the damage assessment of a building.
However, policyholders need to be paid as soon
as possible so that they can begin repairs. Hence, in-
surance companies are extremely interested in (1) re-
ducing the time-consuming steps required and (2) au-
tomating the process as much as possible to predict
losses faster. In this study, we focus on the damage
caused by storms such as Hurricane Irma. Close-
1
https://www.ncdc.noaa.gov/billions/overview,
03/12/2018
range aerial images of the roof structures are obtai-
ned in a high-throughput manner as many buildings
can be imaged in a single flight. These aerial images
are then analyzed to estimate the percentage of dama-
ged roof area. In this way, although the opinions of
loss adjusters cannot be replaced completely, automa-
ted localization of roof damage simplifies the process,
eliminates the need for the time-consuming and dan-
gerous task of climbing onto roofs, and accelerates
the assessment of buildings with different degrees of
damage. Moreover, this approach will provide better
insight into the situation and help insurance compa-
nies set priorities accordingly.
Image-based detection of damage or other anoma-
lies is a pattern recognition problem. Here, we le-
verage state-of-the-art tools for the analysis of pat-
terns and textures. We present a detailed review of
relevant literature and introduce the proposed work-
flow for automatic estimation of roof damage. The
developed method is tested on two different portfolios
after Hurricane Irma; the images in the datasets are
post-loss (i.e., post-event) images and are often avai-
lable in high resolution. An outline of the roof area
is also required; building footprints are often availa-
ble from cadastral offices or freely available databases
such as Open Street Map (OSM). Because of registra-
tion errors in images and non-nadir views, the outlines
have to be adjusted to roof polygons as a preproces-
sing step in the algorithm. Next, superpixel decompo-
Lucks, L., Bulatov, D., Thönnessen, U. and Böge, M.
Superpixel-wise Assessment of Building Damage from Aerial Images.
DOI: 10.5220/0007253802110220
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 211-220
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
211

sition of the roof area is applied to reduce the compu-
tation time required for the subsequent classification
step. To perform classification, three features are con-
sidered: unfiltered image channels, filter banks, and
morphological profiles. Moreover, higher-level featu-
res are also assessed to extract the straight lines and
repetitive texture patterns associated with roofs. The
features are collected and classified superpixel-wise
using the Random Forest classifier. The only user
interaction is to select training regions to define re-
ferences of damaged and undamaged building parts.
Finally, each superpixel is assigned to either the da-
maged or undamaged class. These results can be used
to localize roof damage and compute the grade of da-
mage for an entire building.
2 RELATED WORK
An obvious approach is to determine the amount of
damage from pre- and post-loss data. Several such
approaches have been proposed. Block-wise damage
assessment was conducted by considering differen-
ces in the average intensities and variances of ima-
ges (Zhang et al., 2002). In another study (Tomow-
ski et al., 2010) of a relatively small and rural region
in Darfur, Sudan, four different cost functions were
applied to four texture parameters; thus, in total, 16
responses were analyzed.
As machine-learning methods are implemented to
integrate multiple features and identify appropriate
thresholds user-determined thresholds have become
less popular. Various studies have investigated mor-
phological profiles, structural and radiometric featu-
res (Pesaresi et al., 2007) or correlation coefficients
from a co-occurrence matrix (Rathje et al., 2005).
Another study (Gueguen and Hamid, 2015) also ge-
nerated data with annotated geo-referenced relevant
changes on the ground that is now freely available
and often used as training data for semi-supervised
techniques. However, all images in this dataset must
be re-sampled to a uniform scale, resulting in rather
low resolution. To deal with certain radiometric pro-
perties in the images that are substantially different,
different approaches have been used: assessing the
damage object-wise rather than pixel-wise to analyze
linear segments (Huyck et al., 2005) or measure cer-
tain metrics such as the normalized differential vege-
tation index (NDVI) (Gamba et al., 2007), segment
properties (Im et al., 2008), etc.
Another study (Tu et al., 2017) used pre-event
satellite images only to localize the buildings, pro-
jecting the building footprints onto a high-resolution
post-event image. To correlate both buildings in sa-
tellite images and buildings in aerial images, the aut-
hors applied Support Vector Machines (SVMs) over
the composed hue, saturation, value (HSV) indexes
of the pixels and the 128 entries of the dense Scale-
Invariant Feature Transform (SIFT) descriptor.
Moreover, (Fujita et al., 2017) applied Convolu-
tional Neural Networks (CNNs) to analyze pairs of
pre- and post-event color images if available or only
post-event images where pre-event images were not
available. The training data were annotated manually
and all available images were stored within a data-
set, which contained images of several buildings that
were destroyed by flooding. However, it was impos-
sible to assess the intermediate damage grades in this
dataset using the proposed approach. Two important
trends can be observed in (Tu et al., 2017) and (Fujita
et al., 2017): first, using recent techniques, pre-event
images are not necessary and, second, these techni-
ques rely on high-dimensional spaces of features wit-
hout explicit semantic meaning. A good example
of these high-dimensional feature spaces is a CNN,
which represent a universal framework that provides
suitable solutions to a wide class of problems, inclu-
ding the assessment of roof damage from aerial ima-
ges as considered herein (Fujita et al., 2017; Vetrivel
et al., 2017; Cooner et al., 2016). However, CNNs
crucially depend on a huge amount of training data for
the affected regions, which cannot always be retrieved
rapidly. Recently, significant progress has been achie-
ved in the pixel-wise collection of results using CNNs
(see (Maggiori et al., 2016) for a detailed discussion
of these methods).
Many studies have shown a well-designed appro-
ach with a standard classifier can produce results si-
milar to those obtained using CNNs (Fujita et al.,
2017; Cooner et al., 2016) and emphasized the neces-
sity of using three-dimensional (3D) features to im-
prove the results (Vetrivel et al., 2017). For these re-
asons, we will postpone the implementation of CNNs
to future work and, instead, pursue an alternative stra-
tegy.
The study of (Sirmacek and Unsalan, 2009) is
one example for approaches that rely only on post-
event images and model assumptions rather than on
large training datasets. The model assumption is
that shadows are missing around destroyed buildings.
Thus, the challenge is to distinguish between buil-
dings with and without shadowed regions. Howe-
ver, this method does not recognize whether roof ti-
les have been blown away by the wind and shadows
can often be mistaken for other objects, necessitating
relatively large datasets of features. In a subsequent
study (Ma and Qin, 2012), spectral, spatial, and mor-
phologic features were combined to achieve building-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
212

wise detection rates around 90%. Other studies (Ra-
sika et al., 2006; Gerke and Kerle, 2011) have focu-
sed on the detection of damage from images taken at
oblique angles. The previously mentioned study of
(Vetrivel et al., 2017) focused on localizing damage.
In this approach, the image is subdivided into super-
pixels, which are approximately equally-sized image
segments that ideally coincide with the image edges.
Around every superpixel, a patch is formed and sub-
jected to CNN-based evaluation. At the same time,
3D features resulting from the eigenvectors of the
structure tensors of different radii are calculated in a
point cloud and projected onto the superpixels. Mo-
reover, to integrate features from different modalities,
a multiple-kernel-learning framework (Vetrivel et al.,
2017) was investigated. Based on the findings, the
authors reported that it is very difficult to differentiate
some complex textures from damage without consi-
dering 3D features.
Two main conclusions can be drawn from these
prior studies: First, high-resolution aerial images can
be used for precise localization of roof damage and,
thus, can greatly support the loss evaluation that is
traditionally carried out by loss adjusters. In addi-
tion, recently developed classification techniques can
be used to conduct damage assessment sufficiently
using only post-event images. However, due to vari-
ation between different natural disasters, it is difficult
to determine a priori which type of destruction will
occur (Dell’Acqua and Gamba, 2012). Hence, large
and sophisticated pre-trained databases are of limited
usefulness. To cope with this, our algorithm is desig-
ned to compensate for a small number of training ex-
amples by using a hand-tailored, purpose-based, and
quickly extractable feature set.
3 DAMAGE DETECTION
A successful damage detection and other important
components of the algorithm depend on several steps,
including roof outlining supported by free geographic
data, superpixel decomposition, selection of training
data, and classification. The result can be transfered
into a task-specific damage grading.
3.1 Generating Roof Outlines from
Building Footprints (Alignment)
The analysis process requires roof outlines enclosing
the areas of interest. This outline must fit the roof
outline and must not include the surrounding ground.
For many cities, freely available building footprints
exist, such as those from Open Street Map. Howe-
ver, in many cases, the building outlines do not satisfy
these requirements. In the absence of precisely fitting
roof outlines, freely available building outlines may
be aligned to the actual roof outline as follows.
Let J denote the region of interest in an airborne
RGB image, including a building and the surrounding
area, and let P be the footprint of this building. We
are looking for a transformation ϕ to align P with
the roof of the building such that the corresponding
edges of the transformed building outline P (ϕ) coi-
ncide with the roof outline in J . In our case, ϕ is a
two-dimensional translation but, in general, it may be
necessary to use six- or even eight-dimensional vec-
tors to represent affine or projective transformations.
In addition, all pixels of the image patch in J are labe-
led as inside, outside, and border depending on their
position according to P (ϕ); this label mask is denoted
as M (= M (P )). Since the freely available building
outlines and roofs overlap approximately, we assume
that these data provide a sufficient starting point for
the objective function.
The objective function achieves two purposes.
First, a modification of the mutual-information
function is applied to assess the dominant color, f ∈
R
3
, sampled from a 3D histogram over the color va-
lues of all pixels in J labeled as inside according to
M . Second, we ensure that the norm of the image gra-
dient is significantly higher at the border pixels than
at pixels inside P (ϕ). Thus, the overall cost function
can be expressed as follows:
E(ϕ) =
∑
p∈M (P (ϕ))
{αw
f
(M (p))
k
J
f
(p)
k
+ (1 − α) ˜w
∇
(M (p))
k
∇J (p)
k
}, (1)
where k·k is the L
1
norm, which is applied to achieve
robustness with respect to outliers, ˜· denotes Gaussian
smoothing, and α = 0.5 is a balance parameter, which
may be adjusted depending on the distinctiveness of f
(e.g., higher for red if most buildings in the area have
red roofs and lower for green and gray since these
colors are typically associated with vegetation and
streets, respectively). Furthermore, J
f
(p) = J (p) − f
is computed for each channel; w
f
is equal to 1 inside
P (ϕ) and 0 otherwise. Finally, w
∇
is equal to −1 at
the border of P , ε = 0.01 inside, and 0 outside. Equa-
tion (1) can be minimized by applying the gradient-
free Nelder-Mead method as in (Lagarias et al., 1998).
3.2 Superpixels
The damage grade is derived directly from the amount
of damaged roof area. To locate damaged roof patches
as precisely as possible, the roof area is subdivided
Superpixel-wise Assessment of Building Damage from Aerial Images
213

into small sub-areas. Each sub-area is classified as
either undamaged or damaged.
A suitable choice for sub-areas is derived by a su-
perpixel decomposition of the building mask. Super-
pixels (Jiang et al., 2015) are small image entities that
include several image pixels and they typically group
pixels of uniform color, texture, etc. Although su-
perpixel computation can be time-consuming, the re-
sults are certainly worth the effort because the extrac-
ted features gain robustness and they are invariant to
changes in the image resolution. Further, the com-
putation of superpixels reduces the classification time
since fewer entities need to be evaluated. Finally, as
introduced in Sec. 3.3, high-level features can be in-
corporated as the use of superpixels implies that the
data describe regions and neighborhood relations.
For superpixel decomposition, we follow the im-
plementation of compact superpixels as described in
(Veksler et al., 2010), which is based on the use of
Graph Cuts (Boykov et al., 2001). This approach
involves minimizing an energy function, which con-
sists of a data term that prohibits a superpixel from
leaving the area that was initially reserved for it and
a smoothness term that ensures that the superpixels
have compact borders. Although newer and faster
methods exist, this tool was used here because the
parameter settings had already been validated and
the risk of under-segmentation is quite low. After
segmentation, several quite fast post-processing steps
are necessary: tiny superpixels are merged with their
neighbors, any superpixels that lie outside of or on the
border of the roof outline are removed, and topologi-
cally consistent and surjective labeling is enforced.
The key to detecting damaged roof areas lies in
evaluating of a variety of properties (see Sec. 3.3) for
each superpixel, which allows to classify them either
as undamaged or damaged.
3.3 Features and Classification
Features summarize the properties of each superpixel,
taking into account all varieties of roof types and da-
mages such as blown-away shingles, collapsed areas,
etc., and are used to differentiate between damaged
and undamaged parts of a roof. The most obvi-
ous of these features are the unfiltered color chan-
nels of a red-green-blue (RGB) image and combi-
nations thereof, such as the saturation, NDVI, and
opponent gaussian color space (OGCS) (Geusebroek
et al., 2001). Here, differential morphological pro-
files, which are very popular in remote sensing due
to their invariance under changes in the contrast and
shape of a characteristic region, were applied. The
MR8 filter bank (Varma and Zisserman, 2005) offers
rotational invariance and facilitates the detection of
edges and blobs. Entropy as an indicator for homo-
genity and therewith intactness of a superpixel is also
evaluated. Each of these features is computed pixel-
wise but the obtained values are grouped to derive the
mean and variance for each superpixel. The use of
superpixels results in the inclusion of high-level fea-
tures such as lines and recurring structures. For ex-
ample, a long line on the roof indicates a proper edge,
while short lines of differing orientations are charac-
teristic of damage. Similarly, a regular texture pat-
tern is a strong indicator of an undamaged superpixel
even if the average gradient norm is high. To enhance
the superpixels near long edges, straight line seg-
ments with minimum lengths of 1.5 m are computed
in the image, rasterized and, finally, intersected with
the superpixels. The number of line segments run-
ning through a superpixel is denoted as the lineness
(Bulatov et al., 2011). To further characterize tex-
ture properties, a modified version of the HOG (his-
togram of oriented gradient) features was used (Dalal
and Triggs, 2005). The gradient orientations weighted
by their occurrence are collected modulo π, discreti-
zed into 0.1π steps, normalized, smoothed as in (Pohl
et al., 2017), and sorted in ascending order. Finally,
the cumulative distribution is evaluated. Only the first
three entries of the histogram are used to highlight the
superpixels with only a few dominant gradient orien-
tations. The three buildings in Fig. 1 show selected fe-
atures and their corresponding values (alarm rates) at
the superpixels. The features clearly delineate the da-
maged sections of the roof from the undamaged ones.
In addition, the roof edges and texture salience can be
detected.
Altogether 52 features were considered to deter-
mine whether the roof area covered by one superpixel
is damaged or not. To make this decision, a Random
Forest classifier (Breiman, 2001) with suitable trai-
ning data was used. The number of trees was estima-
ted by adding trees to the Random Forest and analy-
zing the out-of-bag error. It was found that from about
40 trees the error did not significantly change (less
than 0.5%) with further trees. Hence, the amount of
trees for the classification was limited to that number.
The advantages of the Random Forest algorithm are
its robustness against redundant features and its effi-
ciency during calculations because of parallelization.
The Random Forest algorithm supplies a probability
for each prediction. In our case, this output corre-
sponds to the probability that a superpixel is damaged
or not damaged. Hence, a superpixel with a proba-
bility of less than 0.5 is classified as undamaged and
others are classified as damaged.
Tests involving forward feature selection have
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
214
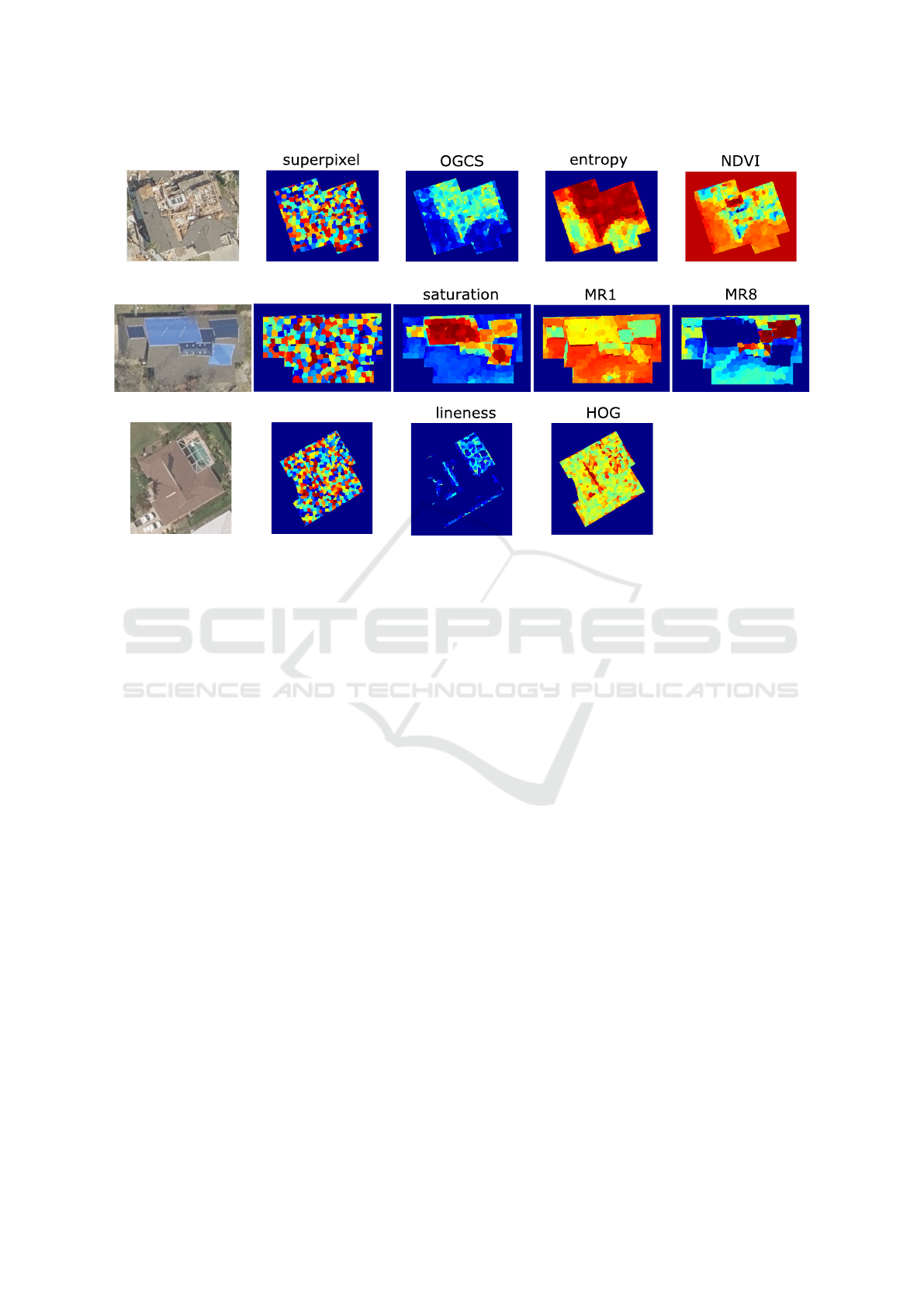
Figure 1: Alarm rates of selected features shown for three exemplary buildings. The first seven feature images clearly delineate
the damaged parts of the roof from undamaged areas. The lineness and HOG reliably indicate the positions of roof edges and
the texture salience.
shown that not all feature were necessary. However,
in order not to perform too many modifications in our
algorithm, we relied on the robustness of the classifier
with respect to the redundant and irrelevant features
(Genuer et al., 2010; Warnke and Bulatov, 2017).
3.4 Training Data
The selection of training data is an essential step for
reliable classification. Hence, it is important to in-
clude appropriate representatives of as many situati-
ons as possible in the training set, including different
types of damage, such as blown-away shingles and
broken roofs, as well as different types of undama-
ged roofs, such as solar panels, areas of sound roof
material, intact pools, air conditioners, and other su-
perstructures (as illustrated in Fig. 2). The occlusion
of roofs by trees is an ambiguous problem as it can
range from branches covering the view of the roof or
small branches scattered on the roof causing no da-
mage to uprooted trees fallen on the roof and causing
significant damage. As in other cases of ambiguous-
ness, by way of precaution, it was decided to classify
all regions covered by trees as damaged.
The training data must be chosen carefully for
each class. For the undamaged class, as many intact
roof entities as possible, such as solar panels, chim-
neys, air conditioners, and different kinds of roof ma-
terial, should be included in the training data. For
the damaged class, all types of damage should be in-
cluded. It is also necessary to include heterogeneous
structures with different degrees of damage and diffe-
rent types of roof structures. Moreover, incorrect as-
signments of undamaged roof areas as damaged (and
vice versa) may disturb the classification.
The selection of training data is the only step in the
workflow that requires user input. Here, we selected
buildings that were distributed evenly across the data-
set to represent a portfolio. For each building, super-
pixels covering wide parts of the roofs were labeled
as either damaged or undamaged. As many types of
structures as possible were selected from both clas-
ses to be included in the training data. The higher the
inhomogeneity of roofs is (meaning roofs consisting
of various materials or differing strongly in architec-
ture), the more training data are necessary to distin-
guish between damage from different roof materials.
However, the training data do not have to be re-
created for every dataset. In cases with similar ima-
ges and roof types, the training data from different
datasets may be transferable. We will consider this
possibility in Sec. 4.
3.5 Damage Grading
Since the damage is localized by assigning each su-
perpixel to one of the two classes, we are able to com-
pute the corresponding areas of damaged and unda-
Superpixel-wise Assessment of Building Damage from Aerial Images
215

Figure 2: High-resolution images showing different types of damage.
maged roof. Thus, it is possible to determine the ratio
between the total number of pixels in damaged super-
pixels and the number of pixels assigned to the roof
area, which reflects the damage grade of the building.
Depending on the task or for map visualization (see
Fig. 3), these values can further be decomposed into
damage categories: intact, light damage, medium da-
mage, and heavy damage.
4 RESULTS AND DISCUSSION
To demonstrate the usability of the proposed algo-
rithm, we analyzed two different datasets: D1 with
a ground resolution of 7.5 cm, which comprises 421
randomly chosen buildings in the city of Rockport,
Texas, with homogeneous roof structures suffering
heavy damage, and D2 with a ground resolution of
15 cm (sampled up to 5 cm/px), which comprises 416
buildings in Marco Island, Florida, with inhomoge-
neous roof structures and less damage. Both cities
were impacted by Hurricane Irma in 2017. The rela-
tively small number of buildings enabled a qualitative
comparison with a manual reference set generated by
experts. Every superpixel in each data set covered ap-
proximately 0.75 × 0.75 m
2
.
Herein, we evaluated the performance and accu-
racy of the proposed procedure. Moreover, glass roofs
represent a special case that is unique to roof damage
detection in that the subjacent floor is visible in the
aerial images; thus, the algorithm has to deal with
both the floor and roof structure simultaneously; to
test the behavior of the proposed method in this case,
the pools attached to buildings in D2 were also eva-
luated. In addition, the superpixel-wise approach was
compared with a pixel-wise approach, the transfera-
bility of the training data was investigated, and the
potential for using additional classes was explored.
Finally, due to unambiguous boundary values, we ex-
cluded from the evaluation all superpixels (or pixels)
that share a border with the roof outline; thus, we also
evaluated the results of roof boundary registration.
4.1 Accuracy
Precisely fitting roof outlines were available for these
datasets and were used to evaluate the accuracy. This
enabled us to avoid propagating the systematic error
associated with the alignment (see Sec. 3.1).
Representative results from D1 are shown in
Fig. 4. The middle column shows the location maps
of the damage resulting from the assignment of da-
maged or undamaged superpixels. The probability
maps show the certainty of the resulting decisions:
dark blue and dark red indicate classifications of un-
damaged and damaged roofs, respectively, with high
certainty. Interestingly, the white patch of roof on the
lower-left corner in the second example was correctly
classified as damaged, although this patch does not
differ visually from other intact white roof structures.
To assess the accuracy of the procedure, wide
ranges of each building were labeled. A three-fold
cross-validation was applied to all labeled examples
to avoid bias due to the choice of training and tes-
ting data. The available portfolio is divided into trai-
ning data and test data. Note that the partitioning in
these two datasets has to be applied on a building-
wise basis; some buildings are assigned to training
set others to test set. It would also be possible to
use a superpixel-wise partitioning randomly chosen
from each building. But this holds the danger that the
classifier would likely learn samples of each damage
that is present and result in non-representative good
results of damage detection due to an over-fitted clas-
sifier. The validation of all 54517 labeled samples in
D1 revealed a testing accuracy of 89%. The corre-
sponding confusion matrix is given in Table 1. Thus,
it can be concluded that undamaged patches of roof
can be recognized slightly better than damaged pat-
ches.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
216
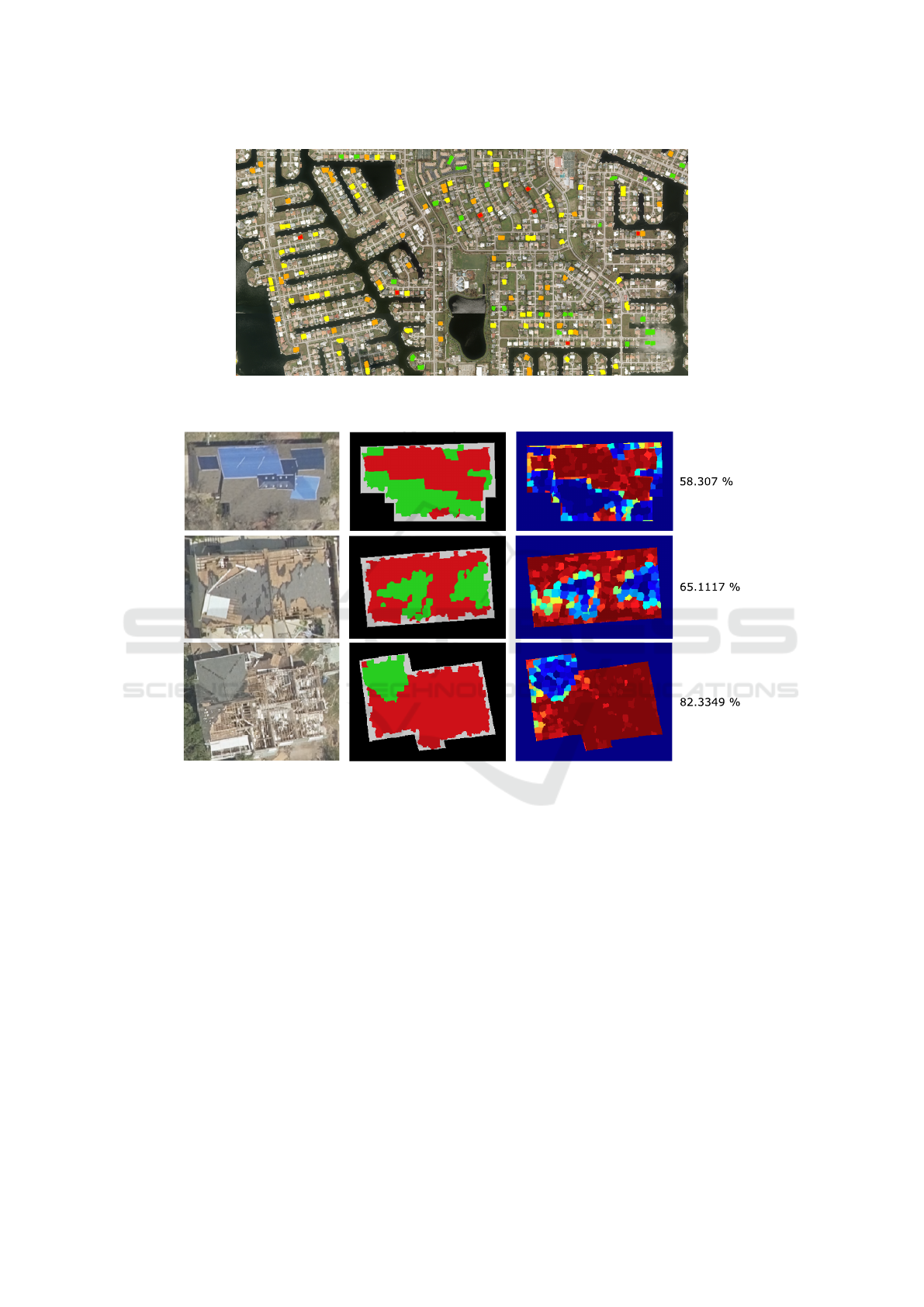
Figure 3: Visualization of damaged buildings on a map. Buildings in the portfolio are colored according to the damage ratio
(green: intact, yellow: light damage, orange: medium damage, and red: heavy damage).
Figure 4: Selected results for D1: (left) orthophoto, (middle) locations of damage, and (right) probability map and damage
grading. Dark red indicates regions that are most likely damaged while dark blue indicates regions that are most likely
undamaged. The proportion of damaged roof area is given by the percentage values to the right.
The roofs in D2 are more diverse, featuring va-
ried structures with different architectures and colors
as well as elevated objects, than those in D1, which
are generally homogeneous. In D2, the roofs are bor-
dered by straight or curved lines and often include
surfaces with many complex orientations. Due to this
structural diversity, a larger amount of training data
is required since distinguishing between roof structu-
res and dam-age is more difficult. Examples of da-
mage localized in D2 are shown in Fig. 5a. The three-
fold cross-validation (see Tab. 1) revealed an over-
all testing accuracy of 91% although only 76% of all
damaged roof patches that are present were recogni-
zed, which is approximately 10% less than that in D1.
Here, only damage to the main roofs (no glass roofs)
was considered. This lower recognition rate can be
attributed to the lower resolution of the images and,
more importantly, the greater inhomogeneity due to
differing architecture and roof colors. Moreover, less
damaged regions are present in the dataset. Hence,
even a lower recognition rate can lead to a high over-
all accuracy.
To further evaluate our method, the results should
be compared with other studies, keeping in mind the
different settings and databases. Another approach
based on neural networks (Vetrivel et al., 2017), the
achieved overall accuracies are sligtly lower (89% or
91% referring to around 93%). However, the diffe-
rences are small, even though the presented method
needs less training data and no additional 3D infor-
mation. Looking at methodes which only rely on pre
and post event images (Thomas et al., 2014), it can be
Superpixel-wise Assessment of Building Damage from Aerial Images
217

Table 1: Confusion matrices for results of damage detection in D1 and D2.
D1 predicted D2 predicted
reference
undam. dam. prec. (%)
reference
undam. dam. prec. (%)
undam. 30672 2109 92.13 undam. 31793 1564 95.31
dam. 4069 17667 81.35 dam. 1906 4998 72.39
acc. (%) 88.17 87.27 88.67 acc. (%) 94.34 76.17 91.38
(a) only main buildings (b) with pools
Figure 5: Damage location maps for several examples in D2.
concluded that the performance are sligtly lower. The
achieved accuracies range from around 68% to 91%,
but it must be noted that the evaluation was done on
the building level and not superpixel-wise, which ma-
kes the comparison difficult.
4.2 Glass Roofs
Swimming pools with glass roofs were attached to se-
veral buildings in D2 and presented a challenge for
the proposed approach. A glass roof provides a nadir-
view of the ground floor. Thus, the entity comprises
both the ground floor and the structure of the glass
roof. This algorithm was not designed for such si-
multaneous evaluation of roof and floor structures. As
aspected, the rate of damage recognition was only ap-
proximately 61%. The detection of destroyed or com-
pletely missing glass structures is understandably dif-
ficult. Nevertheless, impressive results were attained
in this trial: in many cases, the algorithm learned to
differentiate between regular roof grids and destroyed
roof grids so even damage to the glass roof could be
identified in many cases as shown in Fig. 5b. The
overall testing accuracy was 89%, which is compara-
ble to that obtained without considering pools.
4.3 Comparison of Superpixel-wise and
Pixel-wise Evaluation
We also tested a pixel-wise approach and compared
it to the use of superpixels. The evaluation of 100
buildings in D1 required 12570000 pixels to be ana-
lyzed compared to 62600 superpixels. Thus, the num-
ber of superpixels was less than 1% of the number of
pixels and greatly reduces the computational require-
ments. The evaluation of superpixels took only 6%
of the computation time required to evaluate pixels
but provided 10% better accuracy. One example of an
imprecise pixel-wise result is shown in Fig. 6. While
it was initially hypothesized that a pixel-wise loca-
lization would be more effective, the lower accuracy
achieved in the pixel-wise evaluation can be attributed
to the loss of context and neighborhood information
using a pixel-wise approach.
4.4 Multiclass Evaluation
We further analyzed the potential for multi-class eva-
luation in which regions were classified into several
classes that were more specific than damaged and un-
damaged. The damaged class was divided into dama-
ged roofs and pools (glass roofs) and additional clas-
ses, such as solar panels, shadows, and air conditio-
ners, were used for further differentiation in the unda-
maged class. However, this multi-class evaluation did
not affect the accuracy of the proposed method.
4.5 Alignment
To test the performance of the building outline align-
ment introduced in Sec. 3.1, 100 buildings in D2 were
manually selected and the necessary translation para-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
218

Figure 6: Comparison between superpixel-wise and pixel-wise evaluation often leads to a less precise result since information
including neighborhoods and surroundings are omitted.
meters to align the available building outline with the
roof were extracted. The algorithm was run on the
same data and the resulting offsets between building
outline and roof outline were compared. The initial
root-mean-squared error (RMSE) was about 1.58 m
and was reduced to 0.7 m by the alignment, which is
close to the average size of one superpixel. Unfortu-
nately, but understandably, the result differed for non-
damaged and damaged buildings (0.62 and 0.87 m,
respectively). The error in alignment can be attribu-
ted to poor fitting between the roof and the roof out-
line in terms of shape or size and insufficiencies in the
convergence behavior of the optimization.
5 CONCLUSION AND FUTURE
WORK
We presented a semi-automated approach for de-
tection and localization of damaged roof patches in
post-event aerial images. Images of sufficient resolu-
tion and precise outlines of the roofs are required to
carry out the analysis. The roof area is divided into
superpixels, which are then classified as either dama-
ged or undamaged. In this way, the damage can be ra-
ted and localized. Providing training examples for the
classifier constitutes the only interactive step in the
algorithm. Because of a sophisticated choice of fea-
tures, only a small number of training examples are
required, in contrast to previous studies (Fujita et al.,
2017), which rely on large data banks and perform
classification using feature sets of deep neuronal ar-
chitectures.
For future work, the hard choice of a threshold
(in this case, it was set to 0.5) for classifying super-
pixels can be adjusted on the basis of Receiver Opera-
ted Characteristics (ROC) curves. The threshold may
need to be adapted according to its surroundings. It is
possible, though not probable, that an isolated super-
pixel remains undamaged but is surrounded by dama-
ged superpixels. Therefore, corrections using Markov
Random Fields could be useful.
Differentiating between types of roof damage is a
complex challenge that should be investigated further.
In this work, the detected anomalies summarize light
(e.g., lost shingles) and heavy (e.g., collapsed parts
of a roof) damage, with uprooted trees and branches
overlapping a roof causing severe damage. However,
in the current approach, collapsed roofs receive the
same damage grade as those that have lost shingles.
In future work, it would be useful to consider such ty-
pes of damage by e.g. including 3D information and
near-infrared measurements. Nevertheless, the results
obtained by our procedure are extremely important
for insurance companies; it enables them to make a
first quick extrapolation of incurred loss and the sum
insured associated with that to make the money avai-
lable or to contact re-insurance companies.
Finally, even though the proposed approach was
developed in the context of damage detection, the
method and the provided insights of this paper were
useful and could be empolyed for other related appli-
cations, such as roof analysis for installation of solar
panels or roof window detection.
REFERENCES
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 23(11):1222–1239.
Breiman, L. (2001). Random Forests. Machine learning,
45(1):5–32.
Bulatov, D., Solbrig, P., Gross, H., Wernerus, P., Repasi,
E., and Heipke, C. (2011). Context-based urban ter-
rain reconstruction from UAV-videos for geoinforma-
tion applications. ISPRS-International Archives of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, 3822:75–80.
Cooner, A. J., Shao, Y., and Campbell, J. B. (2016). De-
tection of urban damage using remote sensing and ma-
chine learning algorithms: Revisiting the 2010 Haiti
earthquake. Remote Sensing, 08-00868(10):1–17.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings of the
Superpixel-wise Assessment of Building Damage from Aerial Images
219

IEEE Conference on Computer Vision and Pattern Re-
cognition, volume 1, pages 886–893. IEEE.
Dell’Acqua, F. and Gamba, P. (2012). Remote sensing
and earthquake damage assessment: Experiences, li-
mits, and perspectives. Proceedings of the IEEE,
100(10):2876–2890.
Fujita, A., Sakurada, K., Imaizumi, T., Ito, R., Hikosaka,
S., and Nakamura, R. (2017). Damage detection from
aerial images via convolutional neural networks. In
Machine Vision Applications (MVA), 2017 Fifteenth
IAPR International Conference on, pages 5–8. IEEE.
Gamba, P., Dell’Acqua, F., and Odasso, L. (2007). Object-
oriented building damage analysis in VHR optical sa-
tellite images of the 2004 tsunami over Kalutara, Sri
Lanka. In Urban Remote Sensing Joint Event, 2007,
pages 1–5. IEEE.
Genuer, R., Poggi, J.-M., and Tuleau-Malot, C. (2010). Va-
riable selection using random forests. Pattern Recog-
nition Letters, 31(14):2225–2236.
Gerke, M. and Kerle, N. (2011). Automatic structu-
ral seismic damage assessment with airborne oblique
pictometry
c
imagery. Photogrammetric Engineering
& Remote Sensing, 77(9):885–898.
Geusebroek, J.-M., Van den Boomgaard, R., Smeulders, A.
W. M., and Geerts, H. (2001). Color invariance. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 23(12):1338–1350.
Gueguen, L. and Hamid, R. (2015). Large-scale damage
detection using satellite imagery. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1321–1328.
Huyck, C. K., Adams, B. J., Cho, S., Chung, H.-C., and
Eguchi, R. T. (2005). Towards rapid citywide damage
mapping using neighborhood edge dissimilarities in
very high-resolution optical satellite imagery Appli-
cation to the 2003 Bam, Iran, earthquake. Earthquake
Spectra, 21(S1):255–266.
Im, J., Jensen, J., and Tullis, J. (2008). Object-based change
detection using correlation image analysis and image
segmentation. International Journal of Remote Sen-
sing, 29(2):399–423.
Jiang, L., Lu, H., My, V. D., Koch, A., and Zell, A.
(2015). Superpixel segmentation based gradient maps
on RGB-D dataset. In IEEE International Conference
on Robotics and Biomimetics (ROBIO), pages 1359–
1364. IEEE.
Lagarias, J. C., Reeds, J. A., Wright, M. H., and Wright,
P. E. (1998). Convergence properties of the Nelder–
Mead Simplex method in low dimensions. SIAM Jour-
nal on Optimization, 9(1):112–147.
Ma, J. and Qin, S. (2012). Automatic depicting algorithm
of earthquake collapsed buildings with airborne high
resolution image. In Geoscience and Remote Sensing
Symposium (IGARSS), 2012 IEEE International, pa-
ges 939–942. IEEE.
Maggiori, E., Tarabalka, Y., Charpiat, G., and Alliez, P.
(2016). Fully convolutional neural networks for re-
mote sensing image classification. In Geoscience and
Remote Sensing Symposium (IGARSS), 2016 IEEE In-
ternational, pages 5071–5074. IEEE.
Pesaresi, M., Gerhardinger, A., and Haag, F. (2007). Rapid
damage assessment of built-up structures using VHR
satellite data in tsunami-affected areas. International
Journal of Remote Sensing, 28(13-14):3013–3036.
Pohl, M., Meidow, J., and Bulatov, D. (2017). Simplifica-
tion of polygonal chains by enforcing few distinctive
edge directions. Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), 10270
LNCS:3–14.
Rasika, A., Kerle, N., and Heuel, S. (2006). Multi-scale
texture and color segmentation of oblique airborne vi-
deo data for damage classification. In Proceedings
of ISPRS Midterm Symposium 2006 Remote Sensing:
From Pixels to Processes, pages 08–11.
Rathje, E. M., Woo, K.-S., Crawford, M., and Neuen-
schwander, A. (2005). Earthquake damage identifica-
tion using multi-temporal high-resolution optical sa-
tellite imagery. In Proceedings of the IEEE on Ge-
oscience and Remote Sensing Symposium, volume 7,
pages 5045–5048. IEEE.
Sirmacek, B. and Unsalan, C. (2009). Damaged building
detection in aerial images using shadow information.
In 4th International Conference on Recent Advances
in Space Technologies, pages 249–252. IEEE.
Thomas, J., Kareem, A., and Bowyer, K. W. (2014). Au-
tomated poststorm damage classification of low-rise
building roofing systems using high-resolution aerial
imagery. IEEE Transactions on Geoscience and Re-
mote Sensing, 52(7):3851–3861.
Tomowski, D., Klonus, S., Ehlers, M., Michel, U., and
Reinartz, P. (2010). Change visualization through a
texture-based analysis approach for disaster applicati-
ons. In ISPRS Proceedings on Advanced Remote Sen-
sing Science, volume XXXVIII, pages 263–269.
Tu, J., Li, D., Feng, W., Han, Q., and Sui, H. (2017). De-
tecting damaged building regions based on semantic
scene change from multi-temporal high-resolution re-
mote sensing images. ISPRS International Journal of
Geo-Information, 6(5):131.
Varma, M. and Zisserman, A. (2005). A statistical approach
to texture classification from single images. Internati-
onal Journal of Computer Vision, 62(1-2):61–81.
Veksler, O., Boykov, Y., and Mehrani, P. (2010). Super-
pixels and supervoxels in an energy optimization fra-
mework. Proceeding on European Conference on
Computer Vision, pages 211–224.
Vetrivel, A., Gerke, M., Kerle, N., Nex, F., and Vosselman,
G. (2017). Disaster damage detection through syner-
gistic use of deep learning and 3D point cloud features
derived from very high resolution oblique aerial ima-
ges, and multiple-kernel-learning. ISPRS Journal of
Photogrammetry and Remote Sensing.
Warnke, S. and Bulatov, D. (2017). Variable selection
for road segmentation in aerial images. International
Archives of the Photogrammetry, Remote Sensing &
Spatial Information Sciences, 42.
Zhang, J.-F., Xie, L.-L., and Tao, X.-X. (2002). Change
detection of remote sensing image for earthquake-
damaged buildings and its application in seismic di-
saster assessment. Journal of Natural Disasters,
11(2):59–64.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
220
