
TempSeg-GAN: Segmenting Objects in Videos Adversarially using
Temporal Information
Saptakatha Adak
1
and Sukhendu Das
2
Visualization and Perception Lab,
Indian Institute of Technology Madras, Chennai - 600036, India
Keywords:
Video Object Segmentation, Generative Adversarial Network (GAN), Deep Learning.
Abstract:
This paper studies the problem of Video Object Segmentation which aims at segmenting objects of interest
throughout entire videos, when provided with initial ground truth annotation. Although, variety of works in
this field have been done utilizing Convolutional Neural Networks (CNNs), adversarial training techniques
have not been used in spite of their effectiveness as a holistic approach. Our proposed architecture consists
of a Generative Adversarial framework for the purpose of foreground object segmentation in videos coupled
with Intersection-over-union and temporal information based loss functions for training the network. The
main contribution of the paper lies in formulation of the two novel loss functions: (i) Inter-frame Temporal
Symmetric Difference Loss (ITSDL) and (ii) Intra-frame Temporal Loss (IFTL), which not only enhance the
segmentation quality of the predicted mask but also maintain the temporal consistency between the subsequent
generated frames. Our end-to-end trainable network exhibits impressive performance gain compared to the
state-of-the-art model when evaluated on three popular real-world Video Object Segmentation datasets viz.
DAVIS 2016, SegTrack-v2 and YouTube-Objects dataset.
1 INTRODUCTION
Video Object Segmentation has emerged as a popu-
lar field of research in Computer Vision in the recent
decade. The popularity of this domain mainly lies in
its profound impact in the domains of bio-medical re-
search, self-driving cars, video editing, robotics, etc.
The recent years have noticed a dramatic advance in
Autonomous Driving where instance segmentation in
videos have found a huge scope through tasks like
segmenting lanes in roads, detecting obstacles in the
path of motion, segmentation of street signs, etc. With
the recent advancement of deep learning techniques,
there has been many works based on Convolutional
Neural Networks (CNNs) which not only have impro-
ved the performance for problems like image classifi-
cation (Krizhevsky et al., 2012; Simonyan and Zis-
serman, 2014), object detection (Ren et al., 2015;
Redmon et al., 2016), etc., but also in the field of
image segmentation (Maninis et al., 2016; Caelles
et al., 2017; Voigtlaender and Leibe, 2017), using
pre-trained weights of image recognition models on
ImageNet (Deng et al., 2009). The major disadvan-
tage of these CNNs are their hunger for large training
data. Recently, approaches based on Generative Ad-
versarial Networks (GAN) (Goodfellow et al., 2014)
have also been used for the task of image segmenta-
tion (Souly et al., 2017; Luc et al., 2016).
In Video Object Segmentation (VOS), with the in-
troduction of pixel-level annotated DAVIS 2016 (Pe-
razzi et al., 2016) dataset, a shift from segmentation
using bounding box tracking (Li et al., 2016; Wang
and Yeung, 2013; Perazzi et al., 2017) to pixel-level
tracking (Caelles et al., 2017; Voigtlaender and Leibe,
2017) has been noticed. Deep CNNs pre-trained
on large image classification datasets show decent
performance in VOS (Caelles et al., 2017; Perazzi
et al., 2017) and other related tasks like single-object
tracking (Bertinetto et al., 2016; Nam and Han, 2016)
and back-ground modeling (Braham and Van Droo-
genbroeck, 2016; Wang et al., 2017). Among these,
Caelles et al. (Caelles et al., 2017) shows promising
result in VOS, by fine-tuning the pre-trained CNN
with the initial frame of the target video. But, this
method fails to adapt to the drastic appearance chan-
ges in the subsequent frames of the video sequen-
ces. To cope up with this problem, some recent met-
hods have solved the task in the temporal domain
using optical flow (Tsai et al., 2016; Khoreva et al.,
2017), spatio-temporal MRFs (Bao et al., 2018), gui-
ded mask propagation (Wug Oh et al., 2018; Cheng
et al., 2018), etc. In our work, we have followed
Adak, S. and Das, S.
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information.
DOI: 10.5220/0007254302210232
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 221-232
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
221
a GAN based approach for semi-supervised instance
segmentation of an object of interest throughout the
video along with the usage of two temporal informa-
tion based objective functions for end-to-end training
of the network.
To summarize, the novelty of this paper lies in
• an adversarial training based framework
(TempSeg-GAN) to generate segmentation
masks using the initial ground-truth and genera-
ted masks in videos (refer to section 2),
• use of a encoder-decoder model with skip con-
nections as generator network in the proposed ar-
chitecture,
• variation in discriminator training by adding enco-
der module between generator and discriminator,
such that the encoded output of the generator is
used as an input for the discriminator,
• incorporation of two temporal information based
loss functions which not only enhances the seg-
mentation quality of predicted masks but also sta-
bilizes the motion features between them.
The proposed Inter-frame Temporal Symmetric Dif-
ference Loss (ITSDL) is calculated between predicted
and optical flow warped target mask, formed from the
ground-truth mask of previous time step. Thus, it
not only captures motion features between consecu-
tive frames but also enhances the segmentation qua-
lity by minimizing the erroneously identified pixels
in the predicted masks (section 3). The Intra-frame
Temporal loss (IFTL) along with its long-range vari-
ant (L-IFTL) generally preserve the temporal relati-
onship between the generated masks (section 4).
2 TEMPORALLY AIDED
SEGMENTATION NETWORK
The proposed network for Video Object Segmentation
consists of two sub-networks: (i) the Generator (G)
and (ii) the Discriminator (D). The generator G ge-
nerates images close to the ground-truth by extracting
features from the true data distribution p
data
, thereby
making it difficult for the discriminator to differen-
tiate between generated and real images. Whereas,
the discriminator D, is optimized to predict whether
the generated output is synthetic or real. This process
of alternate learning of the two sub-networks in this
framework is similar to the two player min-max ga-
mes (Goodfellow et al., 2014). The overall objective
function for simultaneous minimizing the loss at G
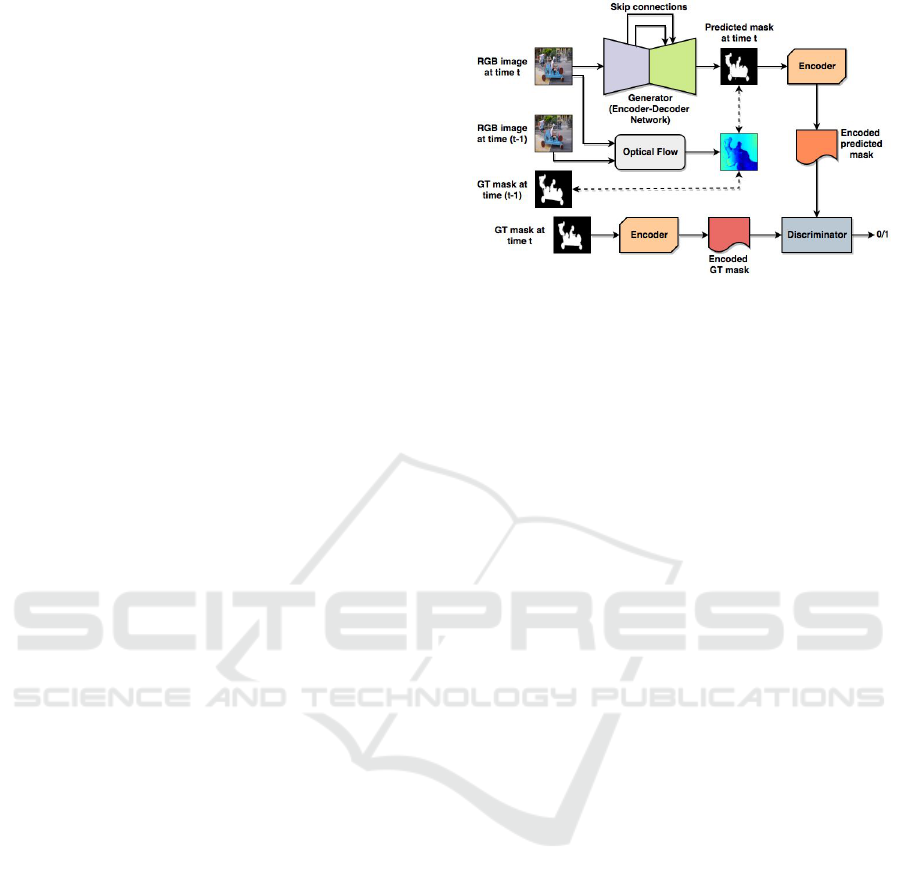
Figure 1: Proposed TempSeg-GAN architecture. GT de-
notes the ground-truth and L9999K refers to the Inter-frame
Temporal Symmetric Difference Loss (L
IT SDL
) estimation
using GT mask at time t, predicted mask at time (t − 1)
and optical flow vectors between RGB input images at time
(t − 1) and t.
and maximizing the distinguisher D is as follows:
min
G
max
D
u(G,D) =E
x∼p
data
[log(D(x))]
+ E
z∼p
z
[log(1 − D(G(z)))]
(1)
where, x is a real image from the true distribution
p
data
and z is a vector sampled from an uniform or
Gaussian random distribution p
z
. Since our work is
based on videos, a sequence of video frames are pro-
vided as an input to the network and is trained using
two novel loss functions which provides temporal as-
sistance. The adversarial loss employed in this paper
is a variant of that in equation 1, as an additional en-
coder module is implemented between the generator
and the discriminator.
The proposed architecture of Temporally aided
Segmentation GAN (TempSeg-GAN) is illustrated in
figure 1. The generator of the model is an encoder-
decoder structure consisting of convolutional modu-
les coupled with pooling and unpooling layers (Zeiler
and Fergus, 2014) with ReLU non-linearity. Batch-
normalization (Ioffe and Szegedy, 2015) and dropout
have also been incorporated in this network. The
contracting path of the encoder captures the context,
while the symmetric expanding path of the decoder
localizes the information precisely. Following “U-
net” (Ronneberger et al., 2015), skip connections are
added between each layer i and (n − i), where n de-
notes the total number of layers. The skip connection
concatenates all feature maps of layer i with those at
the (n − i)
th
layer and aids in sharing low-level infor-
mation like prominent edge details, etc. between the
initial and final layers of the generator network. The
input to the encoder-decoder like generator are frames
of videos of dimension (W
0
×H
0
×3) passed indepen-
dently in a sequential manner, while the output is a
segmentation map of dimension (W
0
×H
0
×1), corre-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
222

sponding to each frame of input. The predicted output
and the ground-truth mask are then encoded with two
separate encoders of same configuration (see figure
1). Each encoder is formed of convolutional layers
combined with pooling modules to down-sample the
input. The encoded predicted and ground-truth mask
obtained as output from the encoder form the input for
the discriminator, which is a collection of convoluti-
onal modules with fully-connected layers at the end
to generate 0 or 1, denoting synthetic or real data re-
spectively.
The main difference between the proposed
TempSeg-GAN model and the traditional one (Good-
fellow et al., 2014) is that the encoder modules have
been used to encode the output of the generator and
the ground-truth before passing it into the discrimina-
tor, instead of using the generator output directly. The
motivation behind the encoding mask lies in the fact
that, the discriminator will be able to distinguish be-
tween the real and synthetic outputs more efficiently
in the projected feature space than in the RGB image
space. The details of the network architecture is men-
tioned in section A of the Appendix.
2.1 TempSeg-GAN training
Our proposed GAN framework follows the training
of the conventional generative adversarial networks
with a few variations. The generator G in the adver-
sarial network is a segmentation model that predicts
the mask considering the joint data distribution of the
input video frame (I) and its corresponding ground-
truth mask (Y ). On the other hand, the discrimina-
tor D distinguishes between predicted and the origi-
nal mask, thus facilitating the training procedure by
minimizing the dissimilarity between the prediction
and the ground-truth. The objective function of the
adversarial training is as follows:
min
θ
G
max
θ
D
∑
I
L
bce
(Y,O
G
(I; θ
G
))
− λ
L
bce
(1,O
D
(O
E
(Y );θ
D
))
+ L
bce
(0,O
D
(O
E
(O
G
(I; θ
G
));θ
D
))
(2)
where θ
G
and θ
D
are generator and discriminator
parameters respectively; L
bce
represents the binary
cross-entropy loss; O
G
and O
D
denote the generator
and discriminator output respectively; O
E
(X) refers
to the encoded segmented mask output of the input
X; 1 and 0 denotes the discriminator labels when the
input is from the ground-truth Y and the generator
O
G
(I; θ
G
) respectively and λ is a regularization pa-
rameter.
Thus, the adversarial objective function for the ge-
nerator, obtained by minimizing equation 2 w.r.t. θ
G
,
is as follows
L
G
adv
(I) =min
θ
G
∑
I
L
bce
(Y,O
G
(I; θ
G
))
+ λL
bce
(1,O
D
(O
E
(O
G
(I; θ
G
));θ
D
))
(3)
where, the first term deals with the consistency of the
predicted segmentation with the target mask at each
position, while the unfitting structure between output
and ground-truth is penalized with the help of the se-
cond term.
Again, equation 2 is minimized w.r.t. θ
D
and the
adversarial discriminator loss function is achieved as
follows
L
D
adv
= min
θ
D
∑
I
L
bce
(1,O
D
(O
E
(Y );θ
D
))
+ L
bce
(0,O
D
(O
E
(O
G
(I; θ
G
));θ
D
))
(4)
where, O
E
(O
G
(I; θ
G
)) and O
E
(Y ) are the encoded
predicted and target masks fed into the discrimi-
nator, which is trained in such a way that it clas-
sifies (O
E
(I), O
E
(Y )) into class 1 and class 0 for
(O
E
(O
G
(I; θ
G
)),O
E
(Y )).
Though the theoretical foundation of this alternate
optimization process of generator and discriminator
is logically firm and well-established, in reality it is
susceptible to mode collapse leading to instabilities
in training. To overcome this implicit instability and
produce better predicted segmented masks, two novel
loss functions based on Intersection-over-Union (IoU)
and optical flow vectors (refer to section 3, 4) have
been formulated and are used in addition to the exis-
ting conventional adversarial losses described in eqns.
3 and 4. The flow vectors are obtained by passing
consecutive RGB input frames through the FlowNet
2.0 (Ilg et al., 2017) optical flow generation module
during training.
3 INTER-FRAME TEMPORAL
SYMMETRIC DIFFERENCE
LOSS
Unlike images, the advantage of the videos lie in the
fact that it provide a latent space of data distribution
by combining the temporal information with the spa-
tial one. CNNs are capable of capturing short-range
consistencies in the spatial domain, which only forms
a small part of the rich input data. Thus, to maintain
the temporal coherency between the masks along with
enhancing the segmentation quality, an Intersection-
over-Union (IoU) based temporal objective function
has been incorporated. It measures the region of simi-
larity between the predicted mask (
ˆ
Y ) and the ground-
truth mask (Y ), by computing the number of overlap-
ping pixels. In other words, it gives an idea of the
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information
223

Algorithm 1: optical f low warp(P
t−1
,W
∗
t−1
,
ˆ
P
t
)
Input: Ground-truth mask patch (P
t−1
) at time t − 1, Predicted mask patch (
ˆ
P
t
) at time t, Optical flow
vector map patch (W
∗
t−1
).
Output: Optical flow warped ground-truth mask patch (P
∗
t
) at time t of dimension same as
ˆ
P
t
.
// s = height and width of
ˆ
P
t
// s + 4 = height and width of P
t−1
and W
∗
t−1
1 Initialize: patch P
∗
t
with each pixel value equal to 0.;
2 for u = 0 to s + 4, i ← u + 1 do
3 for v = 0 to s + 4, j ← v + 1 do
/* (u,v) is the spatial location of pixel at time (t − 1). */
4 u
0
← u +V
u
∆t;
5 v
0
← v +V
v
∆t;
/* V
u
and V
v
are horizontal and vertical flow vectors of (u,v) obtained from
W
∗
t−1
, (u
0
,v
0
) is the new spatial location of (u,v) at time t. Here, ∆t = 1.
*/
6 Label(u
0
,v
0
) ← Label(u,v);
/* The label of (u
0
,v
0
) is updated with that of (u, v). */
7 if (u
0
,v
0
) lies within the patch P
∗
t
then
8 Update corresponding pixel value of P
∗
t
with Label(u
0
,v
0
).
9 end
10 end
11 end
number of mispredicted pixels present in the estima-
ted mask compared to the ground-truth. To formulate
the function in a patch-wise manner, we calculate the
number of mispredicted pixels (|M
p
|) in a patch of the
segmented mask. The set of mispredicted pixels (M
p
)
for class c ∈ {0, 1} obtained by using symmetric dif-
ference of the two vectors p
p
p and
ˆ
p
p
p, is as follows:
M
M
M
p
(p
p
p,
ˆ
p
p
p) = {p
p
p
k
= c,
ˆ
p
p
p
k
6= c} ∪ {p
p
p
k
6= c,
ˆ
p
p
p
k
= c}
∀k = 1,· ·· ,s
2
(5)
where,
ˆ
p
p
p denotes the vector of predicted labels in the
patch
ˆ
P, with top-left pixel index (i, j), of the estima-
ted mask (
ˆ
Y ) and p
p
p is the vector of ground-truth labels
in the corresponding patch P of the target mask (Y );
p
p
p,
ˆ
p
p
p ∈ {0, 1}
s
2
; s is the height and width of the patches
P and
ˆ
P.
In Video Object Segmentation, we implement the
symmetric difference by extracting non-overlapping
patches of dimension s × s (1 < s ≤ 4), represented
by
ˆ
P
t
{i, j, s}, where (i, j) is the top-left index of the
patch, from the predicted mask at time t and then
evaluating the number of mislabeled pixels with the
corresponding target patch P
∗
t
{i, j, s} at same time t.
The mechanism of formation of the target patch from
the ground-truth patch at time (t − 1), denoted by
P
t−1
{i − 2, j − 2,s + 4}, by warping with optical flow
vector patch W
∗
t−1
{i − 2, j − 2, s + 4}, at time (t − 1),
is explained step-wise in Algorithm 1.
In simpler terms, we calculate the symmetric dif-
ference score between small portions of the pre-
dicted mask and the corresponding optical flow war-
ped ground-truth mask. According to our assumption,
the motion features are effectively transfered from the
ground-truth mask of the previous time step to the
warped target mask of current time step using opti-
cal flow vectors. Thus the motion related features can
be well approximated with the low resolution patches
both in the spatial as well as temporal domains. The
smoothness of the features are also guaranteed, un-
less there is a sudden change of scene or rapid mo-
vement in the videos. Computing the loss function
in a patch-wise manner enhances the attention over
small disjoint sections formed as a result of occlusi-
ons, in the segmented masks, which are often ignored
when estimated globally.
The Inter-frame Temporal Symmetric Difference
score for each patch (IT SD
patch
) of a predicted mask
with top-left index (i, j) is denoted as:
IT SD
patch
=
|M
M
M
p
∗
|
|{
ˆ
p
p
p
k
= 1} ∪ M
M
M
p
∗
|
(6)
which estimates a ratio of mispredicted pixels to the
total number of pixels for the patch having top-left
pixel index (i, j) (refer to line 11 in algorithm 2).
The step-by-step procedure of evaluating the
ITSD score by matching the corresponding local pat-
ches of the estimated and optical flow warped masks
is explained in algorithm 2. The objective function
modeled by calculating the ITSD score for the gene-
rator (G) network not only minimizes the score for
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
224

Algorithm 2: Inter-frame Temporal Symmetric Difference score to estimate the similarity between optical flow war-
ped ground-truth mask(s) and predicted mask(s).
extract patch(X
t
,a,b,d) is used to extract a patch of dimension d × d starting from the top-left pixel index (a,b) of
the frame X
t
at time t.
Input: Ground-truth masks (Y), Predicted masks (
ˆ
Y ), Optical flow vector maps (W)
Output: Inter-frame Temporal Symmetric Difference score (Score
IT SD
)
// s = height and width of an patch on the mask
// S = height and width of the masks
// t = current time
// T = Number of masks predicted
1 Initialize: Score
ISD
= 0;
2 for t = 1 to T do
3 for i = 0 to S, i ← i + s do
4 for j = 0 to S, j ← j + s do
5
ˆ
P
t
← extract patch(
ˆ
Y
t
,i, j,s);
6 P
t−1
← extract
patch(Y
t−1
,i − 2, j − 2, s + 4);
7 W
∗
t−1
← extract patch(W
t−1
,i − 2, j − 2, s + 4);
8 P
∗
t
← optical f low warp(P
t−1
,W
∗
t−1
,
ˆ
P
t
) (refer to Algo. 1);
9
ˆ
p
p
p ← vector of predicted labels of pixels obtained from the patch
ˆ
P
t
;
10 p
p
p
∗
← vector of labels of pixels obtained from the patch P
∗
t
;
11 M
M
M
p
∗
← {p
p
p
∗
k
= 1,
ˆ
p
p
p
k
= 0} ∪ {p
p
p
∗
k
= 0,
ˆ
p
p
p
k
= 1}, ∀k = 1, ·· · ,s
2
(see eqn. 5);
/* M
M
M
p
∗
denotes the set of mislabeled pixels in the
ˆ
p
p
p compared with p
p
p
∗
*/
12 Score
IT SD
← Score
IT SD
+
|M
M
M
p
∗
|
|{
ˆ
p
p
p=1}∪M
M
M
p
∗
|
(see eqn. 6);
13 end
14 end
15 Score
IT SD
←
Score
IT SD
/
b
S
/s
c
2
; // Average over all the patches
16 end
17 S core
IT SD
←
Score
IT SD
/T ; // Average over all the masks
batch inputs but also maintains the temporal data dis-
tribution by stabilizing the motion features generated
by the network with the help of flow vectors. The loss
function, L
IT SDL
is defined as:
L
IT SDL
(Y,
ˆ
Y ) = Score
IT SD
(Y,
ˆ
Y ) (7)
where,
ˆ
Y and Y represents the predicted and optical
flow warped mask, and Score
IT SD
denotes the mean
symmetric difference score over all the masks, obtai-
ned using the process mentioned in algorithm 2.
4 INTRA-FRAME TEMPORAL
LOSS
The ITSD Loss, mentioned in section 3, estimates the
motion features that change slowly with respect to
time using the local symmetric difference measures
which in turn also enhances the segmentation quality.
Thus to maintain the temporal relationship between
the frames globally, we introduce the idea of Intra-
frame Temporal Loss over the network output masks.
A few works (Goroshin et al., 2015; Mobahi et al.,
2009) in the recent past exploits the idea of the tempo-
ral coherence to learn the motion features. Assuming
slow variation of motion features over time, we consi-
der 2 consecutive frames
ˆ
Y
t
and
ˆ
Y
t+1
as temporal pair,
where
ˆ
Y
t
and
ˆ
Y
t+1
are TempSeg-GAN generated out-
put masks at time t and t +1 respectively with value of
the discriminator (D) outputs, q
t
and q
t+1
being equal
to 1 for both the masks. The slow variation of motion
features is modeled through an objective function as
L
IFT L
(
ˆ
Y ,
−→
q )
=
T −1
∑
t=0
d
δ
(
ˆ
Y
t
,
ˆ
Y
t+1
,q
t
× q
t+1
)
=
T −1
∑
t=0
q
t
× q
t+1
× d(
ˆ
Y
t
,
ˆ
Y
t+1
)
+ (1 − q
t
× q
t+1
) × max(0,δ − d(
ˆ
Y
t
,
ˆ
Y
t+1
))
(8)
where, T is the total time duration of the masks
generated by the network, q
t
∈ {0,1} gives the value
of the discriminator output, d(x,y) is the measure for
eucledian distance and δ is a positive constant. Thus
speaking in simpler terms, equation 8 minimizes the
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information
225

intra-frame distance between the predicted masks
which have been generated correctly while penalizing
the disparity between the incorrectly predicted frames
with a positive margin δ.
Long-range Intra-frame Temporal Loss: Though
the IFT Loss maintains the temporal consistency
between the consecutive frames, it does not guarantee
the same for the long term frames. Thus, to keep the
stability intact in the spatio-temporal feature space
a Long-range Intra-frame Loss (L-IFTL) is incorpo-
rated by extending the IFT Loss as an estimation of
the distance between initial predicted mask (
ˆ
Y
0
) and
all other predicted masks (
ˆ
Y
t
) at time t(> 0). The
proposed loss is defined as
L
L−IFT L
(
ˆ
Y ,
−→
q )
=
T
∑
t=1
d
δ
(
ˆ
Y
0
,
ˆ
Y
t
,q
0
× q
t
)
=
T
∑
t=1
q
0
× q
t
× d(
ˆ
Y
0
,
ˆ
Y
t
)
+ (1 − q
0
× q
t
) × max(0,δ − d(
ˆ
Y
0
,
ˆ
Y
t
))
(9)
where, the symbols have the same meaning as in
equation 8.
Thus, L-IFT preserves the temporal coherency
among the distant frames by estimating the distance
between the initial and rest of the generated frames.
5 MULTI-COMPONENT
OBJECTIVE FUNCTION
Finally, the overall objective function is formed by
combining the loss functions given in eqns. 7 - 9 with
the adversarial loss (refer to eqn. 3) and the traditional
L
1
objective with respective weights as follows
L
combined
= α
adv
L
G
adv
(I) + α
L
1
L
L
1
(Y,
ˆ
Y ) + α
IT SDL
L
IT SDL
(Y,
ˆ
Y )
+ α
IFT L
L
IFT L
(
ˆ
Y ,
−→
q ) + α
L−IFT L
L
L−IFT L
(
ˆ
Y ,
−→
q )
(10)
where, the weights viz. α
L
1
, α
IT SDL
, α
IFT L
and
α
L−IFT L
are set to 0.25 while α
adv
is kept at 0.1. This
combined loss is minimized during the training of
TempSeg-GAN using Adam optimizer (Kingma and
Ba, 2014).
6 EXPERIMENTAL RESULTS
AND DISCUSSIONS
In this section, we discuss the performance analysis
of our proposed model for video object segmentation
on three popular benchmark real-world datasets. Se-
quences of video frames with corresponding ground-
truth masks are used to train the model. During va-
lidation, the network generates segmented mask of
the object of interest when provided with frames of
video sequences as input. To specify the particular
object to be segmented the model is fine-tuned with
first two annotated frames of the videos. The net-
work generated segmented masks are again used by
our proposed architecture as reference masks to pro-
duce the predicted masks of the next time steps. Op-
tical flow vectors are also calculated using FlowNet
2.0 (Ilg et al., 2017) between the consecutive frames
which helps in formulating the ITSD Loss (described
in section 3). Three metrics: Region similarity (J ),
Contour accuracy (F ) and Temporal (in-)stability (T )
(Perazzi et al., 2016) have been used to compare the
results of our network with the existing state-of-the-
art techniques.
6.1 Datasets
Evaluation of the proposed adversarial training ba-
sed method is done on three benchmark datasets
with challenging characteristics like occlusion, mo-
tion blur, background clutter, change of appearance,
etc.
DAVIS 2016 (Perazzi et al., 2016) consists of 50 high
resolution video sequences with 30 being used for
training and remaining for validation purposes. Sin-
gle or multiple connected objects in each of the 3,455
frames of the dataset are provided with pixel-level
segmentation.
SegTrack-v2 (Li et al., 2013) contains 14 videos with
a total of 947 frames. Sequences with multiple objects
are annotated with instance-level segmentation where
each annotation is treated as an individual object.
YouTube-Objects Dataset (Prest et al., 2012) inclu-
des 126 videos with 10 object classes. The ground-
truth segmentation masks with pixel level accuracy
of ∼4,250 frames have been obtained from (Jain and
Grauman, 2014).
6.2 Evaluation Metric for Segmentation
Three methods (Perazzi et al., 2016) used for quanti-
tative assessment of the predicted masks in compari-
son with the ground-truth masks are as follows : (a)
Region similarity (J ), (b) Contour accuracy (F ) and
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
226

(c) Temporal (in-)stability (T ).
Region similarity (J ) or intersection-over-union
(IoU) measures the similarity in segmentation by
computing the region overlap between the estimated
(
ˆ
Y ) and ground-truth (Y ) masks and is defined as:
J =
|
ˆ
Y ∩Y |
|
ˆ
Y ∪Y |
.
Contour accuracy (F ) gives a measure based on the
precision and recall of the contour points forming the
segmentation boundary.
Temporal (in-)stability (T ) evaluates how smooth
are the motion features in a video, thus measuring the
consistency of sequences of frames over time.
6.3 Performance Analysis of Video
Object Segmentation
The proposed TempSeg-GAN model is first pre-
trained on the ImageNet (Deng et al., 2009) dataset.
During training on DAVIS 2016 (Perazzi et al.,
2016), 30 sequences of annotated video frames
pre-allocated for training purpose has been used.
Augmentation of the frames by random rotation,
flipping and zooming is also done for training, in
such a way that it does not disturb the temporal
consistency among the frames. While validating,
first two frames of each of the remaining 20 video
sequences along with its ground-truth mask is fed
into the GAN to fine-tune the generator before pro-
viding the remaining video frames sequentially into
the network as input to generate the corresponding
segmented masks. Fine-tuning aids in capturing the
appearance of the specific object of interest required
for foreground segmentation. Also, to maintain the
temporal relationship between the predicted masks,
the network-output masks of previous time steps
are used as reference, during generation of next
time step masks, by the framework. A well-tuned
Conditional Random Field (CRF) (Kr
¨
ahenb
¨
uhl and
Koltun, 2011) is used as a post-processing module
on top of our method for fair comparative study of
results among the recent state-of-the-art methods.
Augmentation of the frames at fine-tuning stage
(Test-time augmentation) is also done to improve the
quality of segmentation. TempSeg-GAN++ refers to
the modified version of our baseline model with the
aforementioned add-ons attached.
Ablation Studies on DAVIS 2016
Variations have been made in the proposed archi-
tecture to study its performance and the results
obtained in different cases are exhibited in table
1. First, we remove the fine-tuning based on the
initial frames of the videos and then the output on
the validation set is studied in an unsupervised setup.
Table 1: Ablation study of our proposed method on DAVIS
2016 dataset. Keeping the entire system intact, one varia-
tion is made at a time to see contribution of each module.
The last row consists of the result after adding test-time aug-
mentation and CRF on the top of our base method. The
result of the best configuration is in bold. The right-most
column gives the J
Mean
difference (∆J
Mean
) of different set-
tings in comparison with the baseline method (in row 5).
Aspect System variant J
Mean
∆J
Mean
Training
w/o fine-tune 76.8 -8.3
w/o DAVIS training 68.7 -16.4
w/o ImageNet weights 79.3 -5.8
Loss
L
1
loss 81.2 -3.9
L
1
+ IT SDL 84.6 -0.5
TempSeg-GAN 85.1 -
Add-ons TempSeg-GAN++ 86.3 + 1.2
A substantial decrease in J
Mean
was noticed relying
only on pre-trained ImageNet (Krizhevsky et al.,
2012) weights and DAVIS training data, thus making
fine-tuning indispensable for expanding the tracking
capabilities in the video sequences. Again, relying on
only pre-trained ImageNet weights and fine-tuning,
skipping the training on DAVIS 2016 (Perazzi et al.,
2016) dataset, shows a drastic drop (68.7 J
Mean
)
in the performance of the model. Removing the
pre-trained ImageNet weights results in decrease in
J
Mean
, owing to the loss of scale information. We
argue that tracking a specific object in a video re-
quires a reasonable amount of pre-knowledge which
comes from pre-training the network on ImageNet
(Deng et al., 2009) dataset which consists of ∼10 M
objects belonging to 1000 categories. Thus, these
pre-trained weights assist the model to learn the
general objectness prior, while the training set of
DAVIS 2016 provides an advantage in evaluation by
aiding the model to adapt to the characteristics of
the dataset. The initial frames of the validation set
videos guide the network to track the specific object
of interest throughout the sequences.
The proposed objective functions play an impor-
tant role in the generation of segmentation masks in
the sequence of video frames. Using only L
1
loss
produces holes in the segmented mask and some
of them contain small blobs generated outside the
region of interest causing inaccurate segmentation.
On the other hand, the proposed Inter-frame Tempo-
ral Symmetric Difference Loss (ITSDL), combined
with L
1
and Intra-frame Temporal Loss (IFTL)
produces impressive results (see figure B.2 in the
Appendix), where the ITSDL helps in removing the
blob like artifacts, thereby improving the contours
of the output masks. We also add a well-tuned
post-processing CRF on top of our proposed method
along with augmentation of initial frames during
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information
227
Table 2: Quantitative analysis of TempSeg-GAN in comparison with other existing semi-supervised methods on DAVIS 2016,
YouTube-Objects and SegTrack-v2 datasets. Other results used for comparison are from the respective papers. Best results
are in bold. Values underlined represents the next best results. ↑ = ‘higher the value better’; ↓= ‘lower the value better’.
Method
DAVIS 2016 YouTube-
Objects
SegTrack-
v2
J
Mean
↑ F
Mean
↑ T
Mean
↓ J
Mean
↑ J
Mean
↑
BVS (M
¨
arki et al., 2016) 60.0 58.8 34.7 59.7 58.4
OFL (Tsai et al., 2016) 68.0 63.4 22.2 70.1 67.5
OSVOS (Caelles et al., 2017) 79.8 80.6 37.8 72.5 65.4
Masktrack (Perazzi et al., 2017) 80.3 75.8 18.6 72.6 70.3
RGMP (Wug Oh et al., 2018) 81.5 82.0 13.3 - 71.1
LucidTracker (Khoreva et al., 2017) 80.5 - - 76.2 77.6
FAVOS (Cheng et al., 2018) 82.4 79.5 26.3 - -
OnAVOS (Voigtlaender and Leibe, 2017) 85.7 84.2 18.5 77.4 -
CINM (Bao et al., 2018) 83.4 85.0 28.0 78.4 77.1
TempSeg-GAN (ours) 85.1 83.3 15.1 77.6 76.8
TempSeg-GAN++ (ours) 86.3 85.2 14.2 78.4 77.9
fine-tuning stage to boost the J
Mean
value further.
It is evident from table 1 that, each of the above
factors is important and removing any one of them
causes deterioration in terms of quantitative as well
as qualitative outputs.
Quantitative Analysis with Existing Methods
The major part of our experiments are performed on
the DAVIS 2016 (Perazzi et al., 2016) dataset, which
consists of high-resolution video sequences with all
of their frames annotated with pixel-level segmen-
tation. For DAVIS, 3 metrics: (i) region similarity
in terms of mean Jaccard index (J
Mean
), (ii) mean
contour accuracy (F
Mean
) and (iii) mean temporal
(in-)stability of the segmented masks (T
Mean
), have
been relied upon for evaluation. The validation set
of DAVIS 2016 has been used for computation and
comparison purposes.
We compare our work with a number of recent and
state-of-the-art semi-supervised methods like OnA-
VOS (Voigtlaender and Leibe, 2017), Masktrack (Pe-
razzi et al., 2017), OSVOS (Caelles et al., 2017),
LT (Khoreva et al., 2017), CINM (Bao et al., 2018),
RGMP (Wug Oh et al., 2018), FAVOS (Cheng et al.,
2018), OFL (Tsai et al., 2016) and BVS (M
¨
arki
et al., 2016). The quantitative results of our met-
hod in comparison with other techniques are shown
in table 2. In terms of region similarity J
Mean
, our
baseline TempSeg-GAN w/o adapt model beats all
other existing techniques except OnAVOS (Voigt-
laender and Leibe, 2017) which uses online adap-
tation, test time augmentation and CRF. On using
CRFs and Test-time augmentation on the top of our
base network (TempSeg-GAN++), the result obtai-
ned surpasses OnAVOS. In terms of contour accu-
racy F
Mean
, TempSeg-GAN++ outperforms all other
methods, though the base model falls short when
compared with CINM (Bao et al., 2018) and OnA-
VOS. Temporal (in-)stability measure T
Mean
of both
Temp-GAN and TempGAN++ exhibits dominant per-
formance over all the recent and state-of-the-art semi-
supervised methods except RGMP (Wug Oh et al.,
2018) which used guided mask propagation as a part
of the model (refer column 3 of results under DA-
VIS 2016, in table 2). Thus, the overall performance
of TemSeg-GAN base model along with its modified
variant (TemSeg-GAN++) is better than most of the
existing methods with small exceptions in few cases.
The Inter-frame Temporal Symmetric Difference Loss
(ITSDL) used in our network can be accounted for the
success of our base model which has outperformed
majority of the existing state-of-the-art techniques by
minimizing the number of mispredicted pixels in seg-
mentation. Thus it has not only increased the J
Mean
value, but also has improved the segmented contour
by working on small patches. Again, ITSDL along
with Intra-Frame Temporal Loss (IFTL) and its long-
range variant has contributed to the temporal stability
in between the generated masks. The quantitative re-
sults in table 2 clarifies the effectiveness of our pro-
posed ITSDL and IFTL objective functions.
For complete evaluation, experimentations are
also done on SegTrack-v2 (Li et al., 2013) and
YouTube-Objects (Prest et al., 2012) datasets and
compared our results (refer table 2) with recent state-
of-the-art methods. Due to the lack of proper training
set in YouTube-Objects dataset, the same parameters
as of DAVIS 2016 has been used and the pre-training
step on DAVIS training set is removed to evaluate the
generalization capability of our method. While eva-
luating on this dataset, we have been consistent with
(Khoreva et al., 2017) i.e. the frames in which the ob-
ject of interest are absent has also been included. Both
TempSeg-GAN base network (77.6 J
Mean
) and its mo-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
228
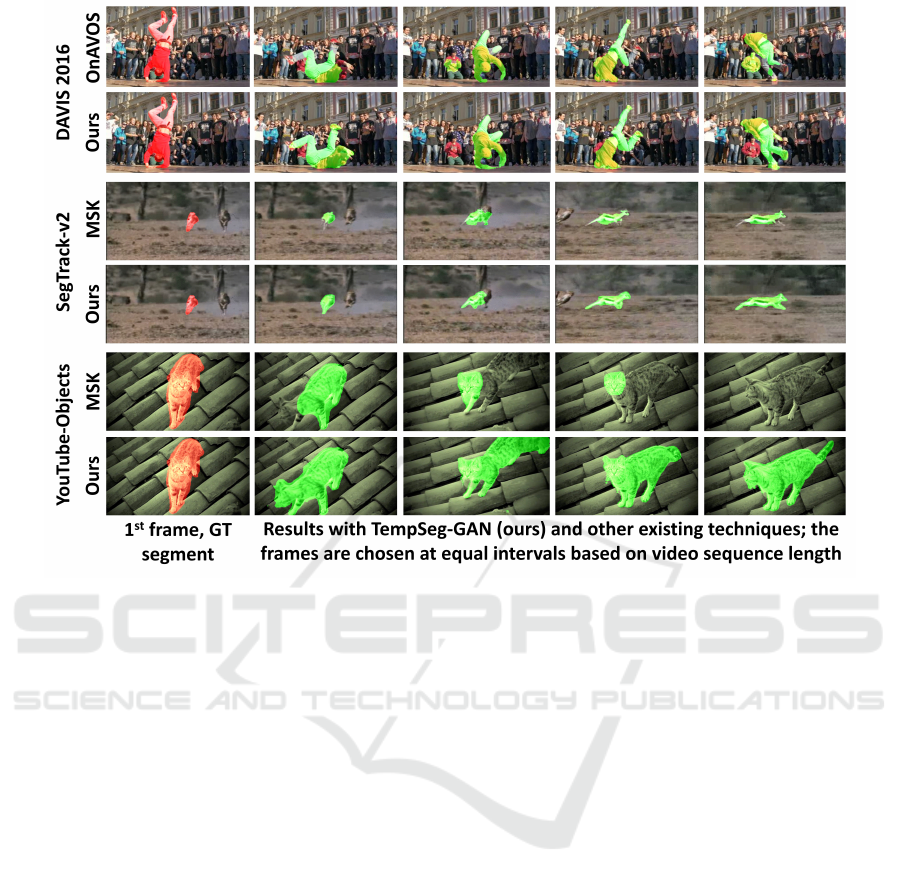
Figure 2: Qualitative results on three benchmark real-world datasets exhibit that our proposed method gives impressive
results in challenging situations like change of appearance, occlusions, background clutter and motion blur, when compared
to OnAVOS (Voigtlaender and Leibe, 2017) and MSK (Perazzi et al., 2017) (best viewed in color).
dified variant (78.4 J
Mean
) give better results than On-
AVOS (refer table 2). TempSeg-GAN++ performs at
par with the state-of-the-art CINM model.
Assessment on the SegTrack-v2 dataset is perfor-
med following the similar choice of setting as done
in recent existing methods (Perazzi et al., 2017; Kho-
reva et al., 2017). Same protocols as of DAVIS 2016
evaluation are carried out by fine-tuning on the ini-
tial frame of the test video sequences. Table 2 shows
that modified version of our base network (TempSeg-
GAN) exhibits promising result in comparison with
the recent state-of-the-art models. The comparative
study of the qualitative results of our proposed net-
work with OnAVOS (Voigtlaender and Leibe, 2017)
and MaskTrack (Perazzi et al., 2017) on three popular
real-world datasets is shown in Figure 2, where our
method performs well in segmenting specific object
of interest under difficult conditions like background
clutter, viewpoint change, motion blur, occlusions and
shape deformation of object. More visual results of
TempSeg-GAN on the three real-world datasets are
shown in figure B.1 of the Appendix.
7 CONCLUSION
The paper proposes a temporally aided Generative
Adversarial Network for the purpose of Video Object
Segmentation. The generator of the model is modi-
fied by implementing an encoder-decoder type archi-
tecture with skip connections, along with a variation
in the discriminator training by introducing an addi-
tional encoder module. Introduction of Inter-frame
Temporal Symmetric Difference Loss (ITSDL) and
Intra-frame Temporal Loss (IFTL) not only provides
a significant improvement in the segmentation results
over the existing state-of-the-art techniques, but also
preserves the motion features among the generated
masks. Quantitative results on three benchmark da-
tasets reveals the superiority of TempSeg-GAN over
other recent state-of-the-art methods. This work can
be effectively implemented to segment traffic signs,
vehicles and other obstacles in the context of autono-
mous cars.
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information
229

REFERENCES
Bao, L., Wu, B., and Liu, W. (2018). Cnn in mrf: Video ob-
ject segmentation via inference in a cnn-based higher-
order spatio-temporal mrf. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 5977–5986.
Bertinetto, L., Valmadre, J., Henriques, J. F., Vedaldi, A.,
and Torr, P. H. (2016). Fully-convolutional siamese
networks for object tracking. In European Conference
on Computer Vision (ECCV), pages 850–865. Sprin-
ger.
Braham, M. and Van Droogenbroeck, M. (2016). Deep
background subtraction with scene-specific convolu-
tional neural networks. In IEEE International Con-
ference on Systems, Signals and Image Processing
(IWSSIP), pages 1–4. IEEE.
Caelles, S., Maninis, K.-K., Pont-Tuset, J., Leal-Taix
´
e, L.,
Cremers, D., and Van Gool, L. (2017). One-shot video
object segmentation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR). IEEE.
Cheng, J., Tsai, Y.-H., Hung, W.-C., Wang, S., and Yang,
M.-H. (2018). Fast and accurate online video object
segmentation via tracking parts.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 248–255. Ieee.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Advan-
ces in Neural Information Processing Systems (NIPS),
pages 2672–2680.
Goroshin, R., Bruna, J., Tompson, J., Eigen, D., and LeCun,
Y. (2015). Unsupervised learning of spatiotemporally
coherent metrics. In IEEE International Conference
on Computer Vision (ICCV), pages 4086–4093.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2017). Flownet 2.0: Evolution of optical
flow estimation with deep networks. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), volume 2, page 6.
Ioffe, S. and Szegedy, C. (2015). Batch normalization:
Accelerating deep network training by reducing in-
ternal covariate shift. In International Conference on
Machine Learning (ICML), pages 448–456.
Jain, S. D. and Grauman, K. (2014). Supervoxel-consistent
foreground propagation in video. In European Con-
ference on Computer Vision (ECCV), pages 656–671.
Springer.
Khoreva, A., Benenson, R., Ilg, E., Brox, T., and Schiele,
B. (2017). Lucid data dreaming for object tracking. In
The 2017 DAVIS Challenge on Video Object Segmen-
tation - CVPR Workshops.
Kingma, D. P. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Kr
¨
ahenb
¨
uhl, P. and Koltun, V. (2011). Efficient inference in
fully connected crfs with gaussian edge potentials. In
Advances in Neural Information Processing Systems
(NIPS), pages 109–117.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in Neural Information Pro-
cessing Systems (NIPS), pages 1097–1105.
Li, F., Kim, T., Humayun, A., Tsai, D., and Rehg, J. M.
(2013). Video segmentation by tracking many figure-
ground segments. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2192–2199.
Li, H., Li, Y., and Porikli, F. (2016). Deeptrack: Lear-
ning discriminative feature representations online for
robust visual tracking. IEEE Transactions on Image
Processing (TIP), 25(4):1834–1848.
Luc, P., Couprie, C., Chintala, S., and Verbeek, J. (2016).
Semantic segmentation using adversarial networks. In
NIPS Workshop on Adversarial Training.
Maninis, K.-K., Pont-Tuset, J., Arbel
´
aez, P., and Van Gool,
L. (2016). Convolutional oriented boundaries. In Eu-
ropean Conference on Computer Vision (ECCV), pa-
ges 580–596. Springer.
M
¨
arki, N., Perazzi, F., Wang, O., and Sorkine-Hornung, A.
(2016). Bilateral space video segmentation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 743–751.
Mobahi, H., Collobert, R., and Weston, J. (2009). Deep le-
arning from temporal coherence in video. In Internati-
onal Conference on Machine Learning (ICML), pages
737–744. ACM.
Nam, H. and Han, B. (2016). Learning multi-domain con-
volutional neural networks for visual tracking. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 4293–4302.
Perazzi, F., Khoreva, A., Benenson, R., Schiele, B., and
Sorkine-Hornung, A. (2017). Learning video object
segmentation from static images. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), volume 2.
Perazzi, F., Pont-Tuset, J., McWilliams, B., Van Gool, L.,
Gross, M., and Sorkine-Hornung, A. (2016). A ben-
chmark dataset and evaluation methodology for video
object segmentation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 724–732.
Prest, A., Leistner, C., Civera, J., Schmid, C., and Ferrari, V.
(2012). Learning object class detectors from weakly
annotated video. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3282–3289. IEEE.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 779–788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems (NIPS), pages 91–99.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
230

Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention
(MICCAI), pages 234–241. Springer.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Souly, N., Spampinato, C., and Shah, M. (2017). Semi su-
pervised semantic segmentation using generative ad-
versarial network. In IEEE International Conference
on Computer Vision (ICCV), pages 5689–5697. IEEE.
Tsai, Y.-H., Yang, M.-H., and Black, M. J. (2016). Video
segmentation via object flow. In Proceedings of the
IEEE Conference on Computer Vision and Pattern Re-
cognition (CVPR), pages 3899–3908.
Voigtlaender, P. and Leibe, B. (2017). Online Adaptation
of Convolutional Neural Networks for Video Object
Segmentation. In British Machine Vision Conference
(BMVC).
Wang, N. and Yeung, D.-Y. (2013). Learning a deep
compact image representation for visual tracking. In
Advances in Neural Information Processing Systems
(NIPS), pages 809–817.
Wang, Y., Luo, Z., and Jodoin, P.-M. (2017). Interactive
deep learning method for segmenting moving objects.
Pattern Recognition Letters, 96:66–75.
Wug Oh, S., Lee, J.-Y., Sunkavalli, K., and Joo Kim, S.
(2018). Fast video object segmentation by reference-
guided mask propagation. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 7376–7385.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European Con-
ference on Computer Vision (ECCV), pages 818–833.
Springer.
APPENDIX
A Network Architecture Details
The details of the generator (G), discriminator (D) and
encoder (E) networks of our proposed TempSeg-GAN
are presented in table A.1 for experimental analysis
. All the convolution layers of G follow ReLU non-
linearity, while batch-normalization and dropout at a
rate of 50% are also included in the network. G is
an encoder-decoder network where skip connections
connect layer i with layer (n −i) by concatenating the
feature maps of former with that of later. Unpooling
layers are also used to upsample the image by a fac-
tor of 2 into higher resolution in terms of both width
and height. G is initialized with pre-trained weights
of ImageNet and the learning rate is fixed to 0.002
for training purpose, which decreases gradually over
time upto 0.0004. The learning rate of the discrimi-
nator (D) network is set to 0.01 and also uses ReLU
non-linearities. For training the entire network, mini-
batches of 50 frames of video sequences were used.
Table A.1: Network architecture details; G, D and E are the
generator, discriminator and encoder networks respectively.
Network G D E
Number
of feature
maps
64, 128,
256, 512,
512, 512,
512, 512,
256, 128,
64
256, 512,
512
64, 128,
256
Kernel si-
zes
5, 3, 3, 3,
3, 3, 3, 3,
3, 3, 5
3, 5, 5 5, 3, 3
Fully con-
nected
N/A 1024, 512 N/A
B Qualitative Results of
TempSeg-GAN
More qualitative results of our TempSeg-GAN base
network on three benchmark real-world datasets viz.
DAVIS 2016, SegTrack-v2 and YouTube-Objects da-
tasets, have been shown in figure B.1.
Additional Illustrations
Apart from figures B.1-B.2, we also provide video
output using .gif format. We perform qualitative eva-
luation on two video clips, one from each of DA-
VIS and SegTrack-v2 respectively. The video outputs
on DAVIS 2016 (DAVIS.gif) and SegTrack-v2 (Seg-
trackv2.gif) contains the comparison of TempSeg-
GAN with the existing state-of-the-art techniques like
OnAVOS (Voigtlaender and Leibe, 2017) and Mas-
kTrack (Perazzi et al., 2017) respectively. Both the vi-
deo clips show the superiority of the TempSeg-GAN
as the result is quite close to the ground-truth.
TempSeg-GAN: Segmenting Objects in Videos Adversarially using Temporal Information
231
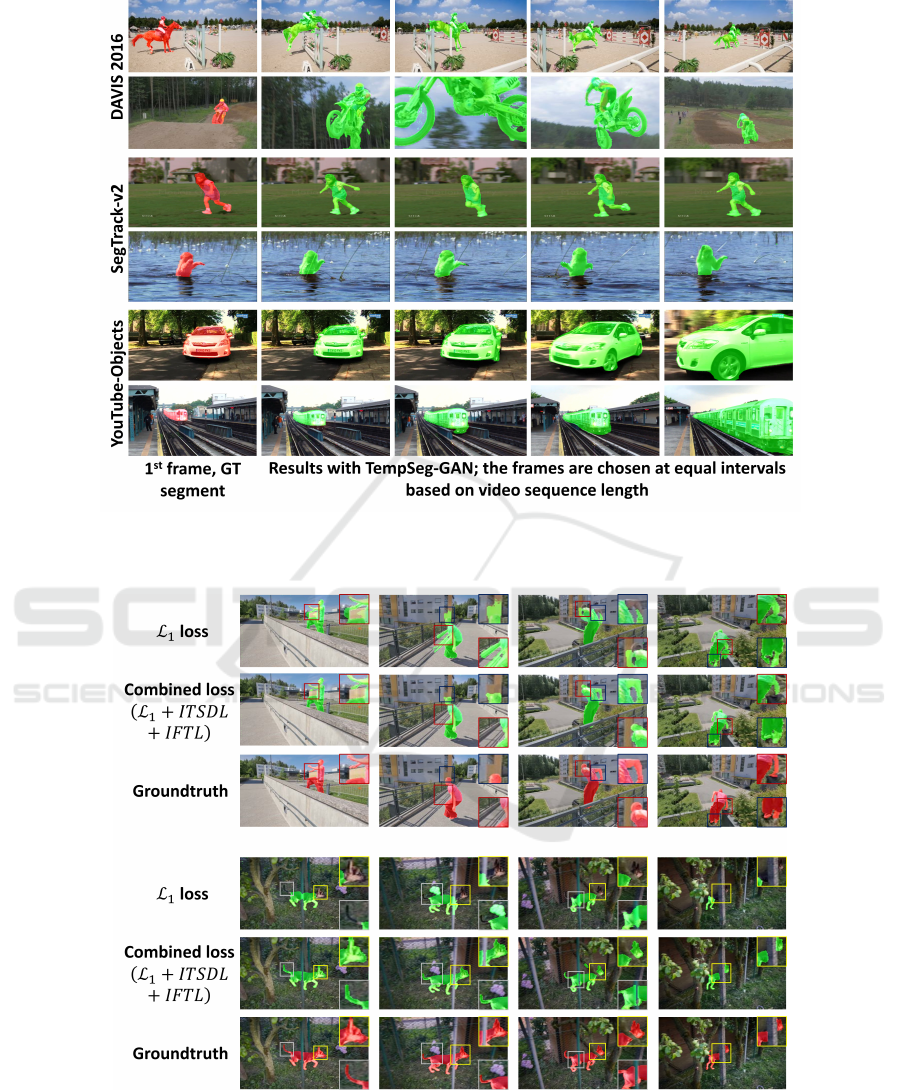
Figure B.1: Qualitative results on three benchmark real-world datasets exhibit that our proposed method gives impressive
results in challenging situations like change of appearance, occlusions, camera view change, background clutter and motion
blur (best viewed in color).
Figure B.2: Comparative study of predicted segmentation results on DAVIS 2016 obtained from our TempSeg-GAN models
using only L
1
loss and Combined (L
1
+ IT SDL + IFT L) loss (refer eqn. 10) respectively. IT SDL and IFT L denotes the pro-
posed Inter-frame Temporal Symmetric Difference Loss (section 3) and Intra-Frame Temporal Loss (section 4) respectively.
Figures in insets show zoomed-in patches for better visibility of the estimated segmented masks in areas with background clut-
ter, occlusion and significant motion blur. Using only L
1
loss produces holes in the segmented mask and some of them contain
small blobs generated outside the region of interest causing inaccurate segmentation. On the other hand, IT SDL + L
1
+IFT L
produces impressive results, where IT SDL helps in removing the blob like artifacts, thereby improving the contours of the
output masks, while IFT L preserves the temporal consistency between the generated masks (best viewed in color).
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
232
