
Convolutional Neural Network for Detection and Classification with
Event-based Data
Joubert Damien
1
, Konik Hubert
3
and Chausse Frederic
2
1
DEA-SAR, Groupe Renault, 1 Avenue du Golf, Guyancourt, France
2
Universit Clermont Auvergne, CNRS, SIGMA Clermont, Institut Pascal, F-63000 Clermont-Ferrand, France
3
Univ Lyon, UJM-Saint-Etienne, CNRS, Tlcom Saint-Etienne, Laboratoire Hubert Curien UMR 5516, F-42023,
Saint-Etienne, France
Keywords:
Event-based Sensor, Convolutional Neural Network, SSD, Faster-RCNN, Transfer Learning.
Abstract:
Mainly inspired by biological perception systems, event-based sensors provide data with many advantages
such as timing precision, data compression and low energy consumption. In this work, it is analyzed how
these data can be used to detect and classify cars, in the case of front camera automotive applications. The
basic idea is to merge state of the art deep learning algorithms with event-based data integrated into artificial
frames. When this preprocessing method is used in viewing purposes, it suggests that the shape of the targets
can be extracted, but only when the relative speed is high enough between the camera and the targets. Event-
based sensors seems to provide a more robust description of the target’s trajectory than using conventional
frames, the object only being described by its moving edges, and independently of lighting conditions. It is
also highlighted how features trained on conventional greylevel images can be transferred to event-based data
to efficiently detect car into pseudo images.
1 INTRODUCTION
Embedded applications still face major issues such
as world perception, energy consumption, learning in
uncontrolled environments, among many others. The
recent progresses made by deep learning approaches
seem promising at first sight as the performance of
many systems have been dramatically increased. But
when these systems have to be implemented in em-
bedded hardware, in order to obtain a sufficient speed
and energy consumption with lower computing po-
wer, some applications are no longer improved. Con-
cerning issues of target detection and classification,
the diversity of user cases make the validation and the
comparison of systems difficult. Most of the time,
some databases such as KITTI (Geiger et al., 2013)
are shared to compare different algorithms. This neg-
lects the sensor, and because of lighting conditions
often make the system misbehave, performances me-
asured on these databases is biased compared to these
of the final system. Currently, the main solution is
to increase the size of the database, but it does not
guarantee that every scenarios are tackled. This issue
can be addressed if the sensor used to acquire data
is independent of the environment. Many conventio-
nal grey level sensors now support an high dynamic
range (HDR) response, but most of the time this latter
dynamically depends on the radiometry of the scene.
Event-based sensors provide a response independent
of the lighting conditions, then it must be investigated
if features they provide can be efficiently used to des-
cribe targets robustly. Detection and classification in
automotive scenarios is one of the most challenging
issue nowadays, with the prospect of the autonomous
vehicle. This paper investigates how event-based sen-
sor can be used with state of the art deep learning
techniques to detect cars, as proposed in a recent work
(Chen, 2017). Our approach will be compared to it
latter. Our main contributions are :
• An analysis of the dynamic of automotive scena-
rios and how it must influence the design of an
event-based detector.
• An event-based data processing technique desig-
ned to build representative features, also used to
train state of the art convolutional neural net-
works.
• An annotation of state of the art dataset to measure
the performances of our method.
This paper is organized as follows : the first
200
Damien, J., Hubert, K. and Frederic, C.
Convolutional Neural Network for Detection and Classification with Event-based Data.
DOI: 10.5220/0007257002000208
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 200-208
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
section shows how event-based systems can increase
detection and classification performances. The se-
cond section explains the process to adapt two state
of the art convolutional neural networks to detect and
classify data provided by an event-based sensor, and
finally the third section presents the results and draws
the conclusions.
2 EVENT-BASED SENSORS
2.1 Neuromorphic Systems
From decades, it is commonly accepted that numeric
sensors and computing systems are mostly synchro-
nous : cameras acquire images with a given framerate
or computers process it with a given clock. One re-
cently popularized embedded application is advanced
driver assistance systems (ADAS), thanks to the de-
velopment of autonomous driving prototypes. Today,
the performance achieved by these systems is not suf-
ficient enough. Every year, the computing power and
the number of sensors (cameras, lidars, radars..) in-
creases, but the human, fitted with ”only” two eyes
and a brain, both being less powerful and less energy
consuming, is still better. The neuromorphic commu-
nity tries to inspire from biology to build smarter sy-
stems with reasonable energy consumption. A funda-
mental difference is how data are processed over time.
In nature, the information is carried asynchronously,
and data bandwidth depends on the relevance of the
data provided. Following these principles, some key
achievements (Liu et al., 2015) have been made re-
cently in the neuromorphism community, and it sup-
poses that the scale of the industrialization will be re-
ached in next years.
2.2 Dynamic Vision Sensors
Many researches have been driven in the medical field
to understand and model how eyes acquire and trans-
fer data to the brain. For example, cat eyes are sensi-
tive to the gradient of the light stimulus, preproces-
sing light information with filters similar to Gabor
ones (Hubel and Wiesel, 1962). The human eye ap-
proximately works alike: some ganglion cells process
in several ways the light collected by rods and co-
nes in order to extract spatio temporal patterns (Mas-
land, 2012). Many attempts have been made to im-
plement these functionalities into chips, some adding
analog spatial filters at pixel level (Ruedi et al., 2003)
while others analogically detect temporal contrast of
light (Delbr
¨
uck and Mead, 1989). A key achievement
was realized with the DVS128 prototype (Lichtstei-
ner et al., 2008), which spread into many applications
domains such as high speed tracking (Delbruck and
Lang, 2013), trajectory estimation (Mueggler et al.,
2015) and pattern detection and classification (Bichler
et al., 2012). Each pixel belonging to this sensor has
the ability to detect and timestamp temporal contrast
variation according to its polarity, and to transfer this
information outside the camera with a microsecond
latency precision.
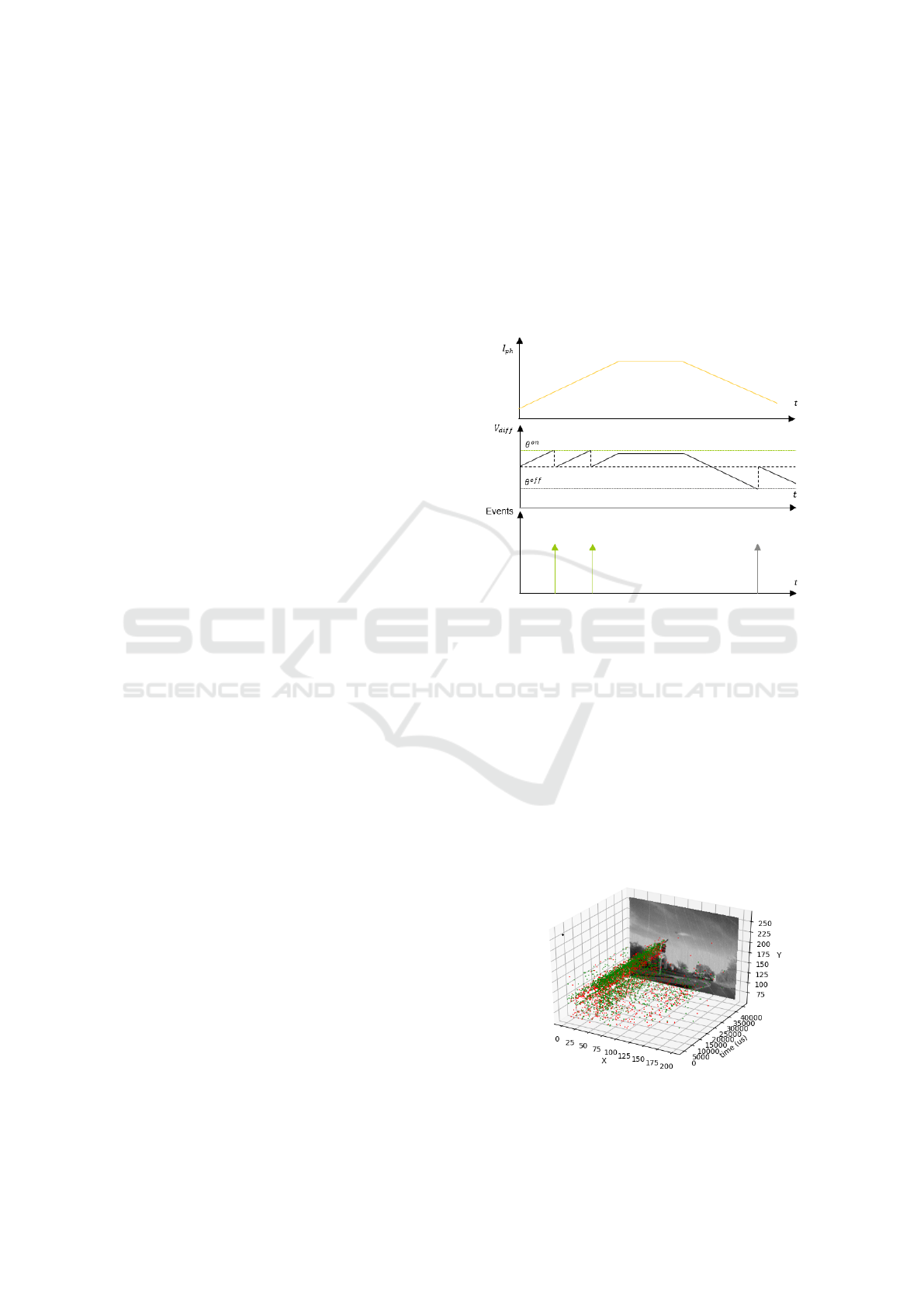
Figure 1: Event-based pixel process to subsample light sig-
nal.
As described in Fig. 1, pixels only react if the flux
they collect will change enough at its surface. Sen-
sors characteristics were analyzed (Lichtsteiner et al.,
2008) (Posch and Matolin, 2011) and directly influ-
ence the quantification of the light signal. When a
pixel detects a change, it generates a spike containing
the change information (x, y, t, p), where (x, y) is the
position in the imager, t the timestamp and p the po-
larity of the change. An example of artificial retina
(or event-based) data is provided in Fig 2. A grey
level measurement has been added to the next gene-
ration of artificial retina to provide more information.
Figure 2: Events generated during 50 ms when the camera
is approaching a road sign. Positive events are in red and
negative in green.
Convolutional Neural Network for Detection and Classification with Event-based Data
201

Two different architectures were proposed: the DA-
VIS (Brandli et al., 2014) and the ATIS (Posch et al.,
2011). Nowadays, these families of sensors benefit
of new manufacturing process such as color filters (Li
et al., 2015) and backside illuminated CMOS archi-
tecture (Son et al., 2017) (Taverni et al., 2018).
3 THE EVENT-BASED
DETECTOR
Since the DVS128, many algorithms have been pro-
posed to detect and track targets in many application
domains. We address the issue of both classify and
detect targets in the same algorithm.
3.1 Related Work
In this section the design of the event-based cars de-
tector and classifier is explained. Such problems have
been massively tackled in conventional grey level
images. The first approaches consisted in extracting
spatial features such as Haar wavelets (Viola et al.,
2003), HOG (Dalal and Triggs, 2005) or SIFT (Lowe,
1999) based descriptor, and then applying a classifier
in the feature space, for example a SVM (Scholkopf
and Smola, 2001) or a boosting tree (Freund et al.,
1996). The features computation and classification
process is no more competitive against new deep le-
arning techniques. Neural networks were studied in
the end of the 90s, but recent improvements in com-
puting capacities make them available for a large part
of the research community in many fields of applica-
tion. Deep learning mostly consists in training a deep
network of artificial neurons backpropagating the er-
ror gradient through the layers. (LeCun et al., 1998).
The network is characterized by its architecture and
topology, but also with the cost function used in the
training process to be adapted to a given task. Deep
learning addressed image classification issues (LeCun
et al., 1998) (Krizhevsky et al., 2012) (Zeiler and Fer-
gus, 2014). In these convolutional neural networks
(CNN) architectures, the first convolutional layers ex-
tract information with Gabor like features (Zeiler and
Fergus, 2014), as works biological vision systems
(Hubel and Wiesel, 1962). In the training process,
both feature extraction and classification are optimi-
zed at the same time. CNN-based networks such as
the VGG (Simonyan and Zisserman, 2014) and the
Inception (Szegedy et al., 2016) model achieve state
of the art results at classifying objects. But classifi-
cation is not enough in automotive applications. The
3D or at least the 2D position of the target is also cru-
cial as it determines how dangerous a scenario can be.
Classification with a neural network is an expensive
operation in computation time and it is not possible
to run classification in a pyramid of multi scale ima-
ges. New architectures were developed to both detect
and classify. One part of the network is dedicated to
object detection and the other part is dedicated to ob-
ject classification. In the R-CNN architecture (Girs-
hick et al., 2014), a region proposal network selects
some relevant regions on which a classifier network
is applied. This entire network is trained with a cost
function taking into account both classification and
detection errors. Many architectures have been pro-
posed to decrease the execution time (Girshick, 2015)
(Ren et al., 2015). In order to address the region pro-
posal and classification at the same time, two network
architectures are now popular : the SSD (Liu et al.,
2016) and the YOLO (Redmon et al., 2016).
Each previous network is efficient with conventional
images, but seems unfitted to use with artificial re-
tina data at first sight because no frames are provi-
ded by DVS sensors. The task of classification in
event based-data is an active field of research. In-
spired by works on conventional images, retina data
space can be projected into spatio temporal feature
space. An interesting work led to descriptors inspi-
red from HOG (Dalal and Triggs, 2005) : the HOTS
(Lagorce et al., 2017) and its improvement, HATS
(Sironi et al., 2018). Some neural network appli-
cations were adapted to process asynchronous retina
data. Asynchronous networks have been developed
in order to manage both spatial and temporal infor-
mation. Biological neurons present a great diversity
of transfer functions (Izhikevich, 2004), then most
of the time a standard simplified leaky integrate and
fire neuron model is implemented. It must be noti-
ced that these Spiking Neural Networks (SNN) were
studied before first artificial retina appeared, and that
they achieve good performances at classifying and
detecting spatio-temporal patterns (Masquelier et al.,
2008). The main difficulty is to implement these net-
works and dedicated hardware, which are still at the
prototype stage.
Another not bio-inspired method consists in building
pseudo images with event-based data, and applying
frame based approach on it (Moeys et al., 2016) (Ma-
queda et al., 2018). In the work of (Chen, 2017),
a reduced version of the Yolo network is trained to
achieve car detection and classification. Let us inves-
tigate how the preprocessing step must be elaborated
in order to train efficiently CNNs.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
202
3.2 Images of Event Activity
Our method does not use the precision of the tem-
poral information encoded into events. We believe
this information is not necessary here, as it could be
in other applications such as spatiotemporal pattern
detection and classification, for example gesture re-
cognition (Amir et al., 2017). The purpose here is to
tackle automotive scenarios where it is crucial to ro-
bustly detect incoming targets. In our approach, the
speed of targets is constant during the detection stage,
it is considered that no relevant information can be ex-
tracted from timing information to detect and classify.
However, after the detection and classification, the ti-
ming information could be used to estimate the tra-
jectory and potential time to collision. In automotive
scenarios, the diversity of target relative speeds is im-
portant then several timing scales must be used. For
example, concerning slow targets, it is not necessary
to quickly detect them, but rather to precisely detect
them and estimate their trajectory.
3.2.1 Integration of Events over Time
In order to track both fast and slow incoming targets,
the activity of the sensor is integrated by using se-
veral temporal windows, as the opposite of the work
of (Chen, 2017), where the integration lasts 10 ms in
order to obtain results at 100 Hz. The number and
the duration of the temporal windows are estimated
depending on the application. In the work presented
here, the constraints of automotive applications obli-
ged us to process the event stream using three diffe-
rent temporal windows : one of 40 ms, t
40
, one of
100 ms, t
100
, and one of 200 ms, t
200
. Detection are
processed in the three pipelines in parallel, in order
to detect fast, normal and slow targets. We suppose
that the detection time is less than the shorter tempo-
ral window (40 ms) in order to start a new detection as
soon as the last t
40
is available. One up to three tempo-
ral windows are used to compute final detection. This
latter is obtained taking the maximum of the detecti-
ons realized in each temporal window. This behavior
is illustrated in Figure 3 to sum up how data are pro-
cessed in our method.
When a pixel detects a change, several events are
generated depending on the slope of the change or
on the parameters of the sensor, as illustrated in Fig.
1. Then targets detected in t
200
may generate more
events in one pixel compared to those of t
40
. We chose
to not count the number of events on each pixel, but
rather to simply set the grey level to one if the last
spike is positive, to zeros if it is negative, and 0.5 if
nothing happened in the time window. Contrary to
(Chen, 2017), we think that preserving the polarity
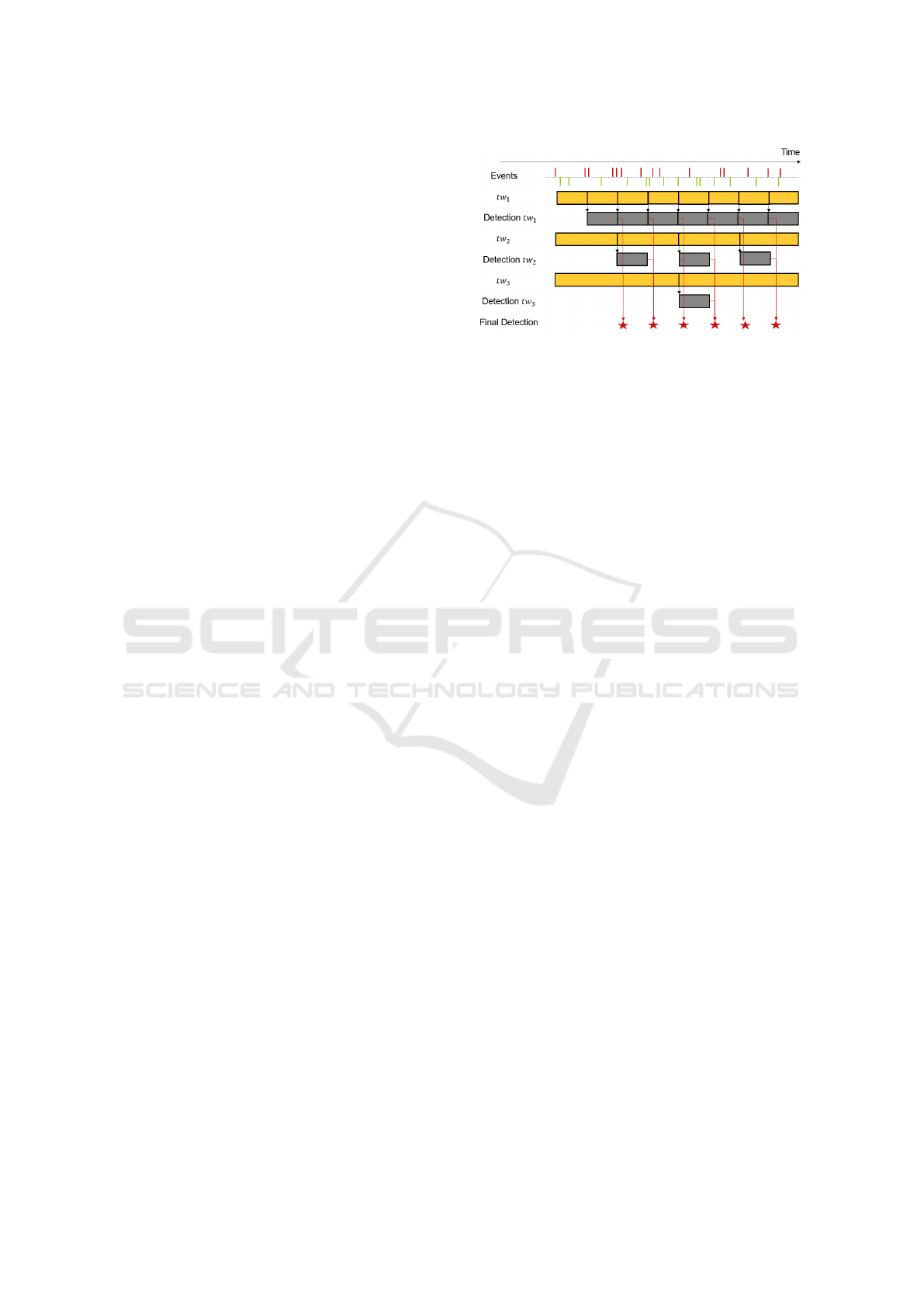
Figure 3: Schematic of the proposed detection architecture
to both detect fast and slow targets. Time windows (in Yel-
low) and detections (in Grey) are obtained in parallel.
will help to detect a shape of car. Fig. 4 shows ima-
ges of events considering two temporal windows.
3.2.2 Network Architecture
It is now investigated how these images can be used
with standard CNN architectures. The well-known
SSD (Liu et al., 2016) and Faster-RCNN (Ren et al.,
2015) networks are here adapted to event-based data.
Both architectures are kept identical. Concerning the
SSD, 11 convolutional layers are trained, the first ones
being initialized as the first layers of the VGG net-
work. From 6 layers at different scale levels, features
are extracted through a convolutional layer whose fil-
ters have a given spatial shape called anchor. These
latter are linked to a softmax classifier to obtain the
class: car or not car, and also adjust the final bounding
box of the object. Then, for each anchor is trained
C +4 filters where C is the number of classes. Concer-
ning the Faster RCNN, the region proposal network
(RPN) which proposed potential regions of interest is
initialized with layers of VGG or ZF networks. Af-
ter the RPN, a small network maps RPN features into
a smaller feature space where two sliding fully con-
nected layers predict both class and position of ob-
jects. A similar anchor process is used to generate the
new feature space.
3.3 Datasets
When applications were developed using the DVS128
sensor, databases were needed to train and test al-
gorithms. The first ones were small (Serrano-
Gotarredona and Linares-Barranco, 2015) or artifi-
cial (Orchard et al., 2015). Larger databases are now
available, but sometimes provided without annotati-
ons. For automotive applications, the DDD17 data-
base (Binas et al., 2017) has been recently proposed,
and contains 12 hours of acquisitions synchronized
with several information of the car such as the steer-
Convolutional Neural Network for Detection and Classification with Event-based Data
203

(a) Grey level Image (b) Image t
40
(c) Image t
100
(d) Image t
200
Figure 4: Image of events in different time windows for the same scene. In this case, where the speed between the two cars is
low, only longer temporal window contains the shape of the car.
ing angle or the GPS position. Our first contribution
was to annotate a part of this dataset in the same man-
ner as (Chen, 2017). A dedicated network, different
from the final detection network, is specially trained
on grey level images from the DDD17 dataset. Du-
ring initialization, a SSD network pre-trained on RBG
images is applied on grey level images in order to
keep only scenes containing cars to obtain a first set
of annotation A
0
.
Around each target detection, 500 ms of event data
are kept in order to generate time windows. Detection
are made every second of the videos acquired by day.
We also annotated 800 grey level images by hand to
build the database A
H
. A first version of the annota-
tion network was trained on A
0
: W
0
and in finetuning
the initial multi-class SSD trained on RGB images on
A
0
. The network W
0
is then applied on the database
to provide a new set of annotations which defines a
new database A
1
. The performance of the network W
0
is also evaluated on A
H
. An iterative specialization
process is then used to increase the performance of
the annotation network. We iterate this process until
the performance of the network into the database A
H
stops to increase and get W
n
. In practice, it takes 3 ite-
rations to converge, and the final network does not de-
tect each car in A
H
, mostly because of lighting condi-
tions (grey level images have a small dynamic range),
and because of small targets. Using W
3
the final da-
tabase is annotated. In this latter, no information is
provided about the scenario, but the diversity of rela-
tive speeds seems not representative enough.
Another similar work has been proposed to build
an annotated event-based automotive database (Sironi
et al., 2018). Authors apply almost the same anno-
tation process to pick relevant data from automotive
scenarios, but they only provide 100 ms of event data
in bounding boxes, half belonging to cars and half be-
longing to the environment. Also, grey level images
are not provided. The aim of this database is to eva-
luate classification performances. In order to adapt
it to measure detection and classification performan-
ces, we randomly positioned these boxes containing
cars in images to generate a pseudo artificial database.
This work has been conducted only for testing pur-
poses. As our network is trained with real images,
we ensure that cars are close to image sensor (in the
range [20% , 80%] of image’s height. Two images of
40 ms are built for each acquisition, then 8790 pseudo
images contain cars and 8790 contains background.
4 EXPERIMENTS
The final detection networks R
SDD
, R
FZF
and R
F V G
are trained on the labeled DDD17 database (Binas
et al., 2017), using ZF or VGG weights at initializa-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
204
tion for the first layers. These filters layers are com-
monly used on color images, and are effective to ex-
tract spatial patterns with high level of abstraction.
For the SSD, the learning rate is set to 0.001 and expo-
nentially decreases with a 0.97 factor. Instead of using
a momentum solver as proposed in the original SSD
architecture, an Adam solver (Kingma and Ba, 2014)
was preferred as it does not diverge at the beginning
with the same learning rate. Using Adam, ε = 0.1, and
the weight decay is 5e
−5
. Data augmentation techni-
ques were not used during the training. The Faster-
RCNN inspired network uses the same training pro-
cesses, as they both converge quickly and efficiently.
We decided to only train the network for car detection,
the resolution of DDD17 image being approximately
a quarter VGA ((346*260 pixels) we estimated that
there are not enough information to separate car from
truck classes.
4.1 DDD17
The final database contains 120k images for training
and validation, and 15k images for testing. One main
drawback of our annotation method is that it also an-
notates event-based data when there is no relative mo-
tion between targets and camera. In this case, there is
almost no event data in each time window.
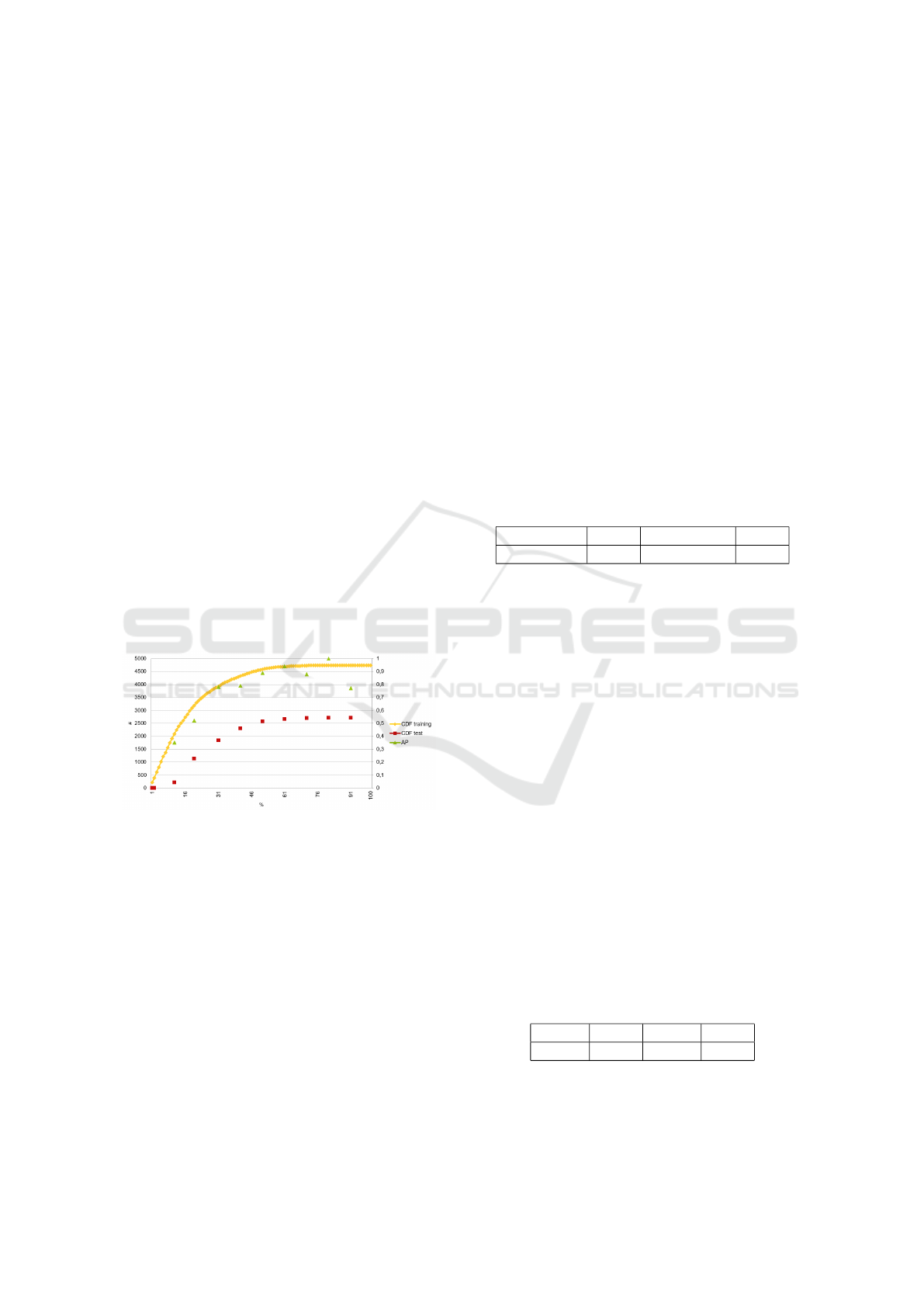
Figure 5: Integration of cumulative distribution function
(CDF) of the percentage of spiking pixels into the bounding
boxes for the training and testing database. Average preci-
sion of the SSD(15 %) on the testing database according to
the activity is also computed: if activity is equal to x %, AP
is computed for BB whose activity is inside ]x − 10%; x].
Figure 5 reveals that most of the pseudo images do
not contain significant information: 75 % of bounding
boxes contains less than 35 % of spiking pixels inside.
In theory, 35% pixels spiking in the box may repre-
sent a 35 % occluded target. We trained the network
with bounding boxes containing more than 35% or 15
% spiking pixels. This method decreases the number
of images in the training database. At the end, 9000
training and 2000 testing images remain considering
bounding boxes with more than 15 % spiking pixels.
Considering bounding boxes with more than 35 %
spiking pixels, it remains 7000 training and 1500 tes-
ting images. Network are trained on both datasets.
The average precision (AP) is computed for each net-
work using the VOC 2007 standard, and is presented
in Table 1. These results not show a significant perfor-
mance difference between the two databases concer-
ning the SSD network. Thus, R
FZF
and R
F V G
have
not been trained on bounding box containing more
than 35 % spiking pixels. The network using the
Faster-RCNN architecture with the ZF weights pro-
vide best AP results, but as illustrated in Figure 6, it
also generates more false detections. However, if a
target generating 14% of spikes inside its bounding
box is detected, it is considered as a false positive in
the previous results. The influence of the activity on
AP is analyzed in Fig. 5 and seems to evolve similarly
to the CDF.
Table 1: Average precision of CNN-inspired networks on
two DDD17 testing databases with different number of
active pixels in bounding boxes.
R
SSD
(35 %) 0.693 R
FZF
(15 %) 0.834
R
SSD
(15 %) 0.698 R
F V G
(15 %) 0.846
4.2 PropheseeNcar
The database is generated as explained in previous
section. SSD results must be filtered to address only
classification. Bounding boxes whose intersection
with the data from Prophesee is more than 50% are
kept. In Table 2 are compared the accuracy: the
R
SSD
(15 %) does not perform the best result on this
database, but this network was not specialized to this
database. Being generated with a different sensor,
using different settings, the average precision result
obtained on this pseudo dataset is almost identical
(0.68) to the average precision obtained on the DV17
database. This indicates that event-based sensors pro-
vide an object representation independent of the sen-
sor, which confirms the assumption that event-based
data can provide more robust and generic target mo-
dels. A more sensitive sensor will be more robust to
low contrast scenes, but the obtained feature repre-
sentation would be the same using our preprocessing
method.
Table 2: Accuracy of the proposed networks versus state of
the art classifiers on the PropheseeNCar database.
R
SSD
0.746 HOTS 0.561
H-first 0.683 HATS 0.902
Convolutional Neural Network for Detection and Classification with Event-based Data
205
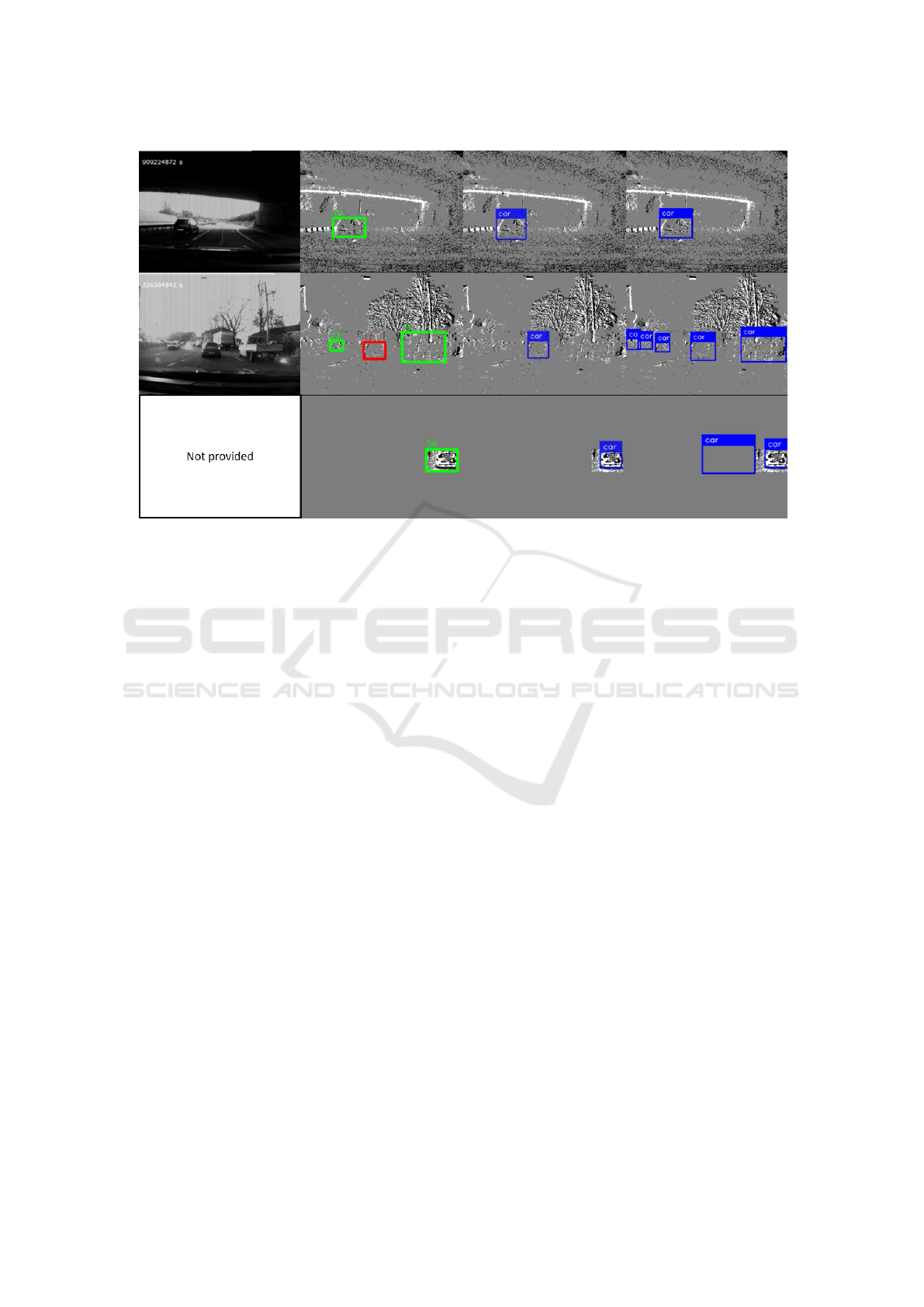
Figure 6: The first column contains grey level images, and the second one draws the ground truth labels on t
40
images. The
red boxes contain less than 15 % of event activity, while in green boxes more than 15 %. Some testing results obtained with
R
SSD
(15 %) are displayed in the third column while the fourth columns contained results from R
FZF
(15 %). The two first
lines correspond to the DDD17 database, while the last lines corresponds to the PropheseeNCar database. Further results are
available online https://youtu.be/r1GqjE0jz58.
5 DISCUSSION
In the evaluation of our networks, the ability to solve
every automotive scenarios is not really estimated.
In order to measure the performance of the network
regarding to the relative speed of targets, it should
be measured performance regarding to relative speed.
This work will be conducted in a future work by rea-
lizing tests on EURO NCAP user cases.
Many layers were used to process the information into
the networks, and it may be studied if a more reasona-
ble number of parameters can be used to achieve de-
tection and classification task at a same performance
level. Finally, the main drawback of our approach is
to determine when the sensor is providing enough in-
formation to realize classification. The true advantage
of event-based sensor, the time information, is neg-
lected in our work, and the pseudo images could also
be obtained by computing the difference between two
conventional frames, and applying a threshold.
6 CONCLUSION
An adaptation of the SSD and the Faster-RCNN archi-
tectures has been proposed in order to process event-
based data for automotive scenarios. The data of a re-
cent published database acquired with a state of the art
silicon retina is labelled with an iterative process. Au-
tomotive constraints influence the way data are packa-
ged before to be processed by the network, in order to
maintain a sufficient level of performance for each re-
lative speed between the camera and the targets. De-
tection performances are measured and confirm re-
sults of how transferable are CNN filters to event-
based pseudo images. It has also been highlighted that
the spiking flow must be carefully analyzed to process
the classification with enough data.
REFERENCES
Amir, A., Taba, B., Berg, D., Melano, T., McKinstry, J.,
Di Nolfo, C., Nayak, T., Andreopoulos, A., Garreau,
G., Mendoza, M., et al. (2017). A low power, fully
event-based gesture recognition system. In Procee-
dings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 7243–7252.
Bichler, O., Querlioz, D., Thorpe, S. J., Bourgoin, J.-P.,
and Gamrat, C. (2012). Extraction of temporally
correlated features from dynamic vision sensors with
spike-timing-dependent plasticity. Neural Networks,
32:339–348.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
206

Binas, J., Neil, D., Liu, S.-C., and Delbruck, T. (2017).
Ddd17: End-to-end davis driving dataset. arXiv pre-
print arXiv:1711.01458.
Brandli, C., Berner, R., Yang, M., Liu, S.-C., and Delbruck,
T. (2014). A 240× 180 130 db 3 µs latency global
shutter spatiotemporal vision sensor. IEEE Journal of
Solid-State Circuits, 49(10):2333–2341.
Chen, N. F. (2017). Pseudo-labels for supervised
learning on event-based data. arXiv preprint
arXiv:1709.09323.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Delbruck, T. and Lang, M. (2013). Robotic goalie with 3 ms
reaction time at 4% cpu load using event-based dyna-
mic vision sensor. Frontiers in neuroscience, 7:223.
Delbr
¨
uck, T. and Mead, C. (1989). An electronic photore-
ceptor sensitive to small changes in intensity. In Ad-
vances in neural information processing systems, pa-
ges 720–727.
Freund, Y., Schapire, R. E., et al. (1996). Experiments with
a new boosting algorithm. In Icml, volume 96, pages
148–156. Bari, Italy.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The kitti dataset. The Internatio-
nal Journal of Robotics Research, 32(11):1231–1237.
Girshick, R. (2015). Fast r-cnn. arXiv preprint
arXiv:1504.08083.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE conference on computer vision and pattern re-
cognition, pages 580–587.
Hubel, D. H. and Wiesel, T. N. (1962). Receptive fields,
binocular interaction and functional architecture in
the cat’s visual cortex. The Journal of physiology,
160(1):106–154.
Izhikevich, E. M. (2004). Which model to use for cortical
spiking neurons? IEEE transactions on neural net-
works, 15(5):1063–1070.
Kingma, D. P. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Lagorce, X., Orchard, G., Galluppi, F., Shi, B. E., and Be-
nosman, R. B. (2017). Hots: a hierarchy of event-
based time-surfaces for pattern recognition. IEEE
transactions on pattern analysis and machine intelli-
gence, 39(7):1346–1359.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, C., Brandli, C., Berner, R., Liu, H., Yang, M., Liu, S.-
C., and Delbruck, T. (2015). An rgbw color vga rol-
ling and global shutter dynamic and active-pixel vi-
sion sensor.
Lichtsteiner, P., Posch, C., and Delbruck, T. (2008). A 128×
128 120 db 15 µs latency asynchronous temporal con-
trast vision sensor. IEEE journal of solid-state cir-
cuits, 43(2):566–576.
Liu, S.-C., Delbruck, T., Indiveri, G., Douglas, R., and
Whatley, A. (2015). Event-based neuromorphic sys-
tems. John Wiley & Sons.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. C. (2016). Ssd: Single shot mul-
tibox detector. In European conference on computer
vision, pages 21–37. Springer.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer vision, 1999. The pro-
ceedings of the seventh IEEE international conference
on, volume 2, pages 1150–1157. Ieee.
Maqueda, A. I., Loquercio, A., Gallego, G., Garcıa, N.,
and Scaramuzza, D. (2018). Event-based vision meets
deep learning on steering prediction for self-driving
cars. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 5419–
5427.
Masland, R. H. (2012). The neuronal organization of the
retina. Neuron, 76(2):266–280.
Masquelier, T., Guyonneau, R., and Thorpe, S. J. (2008).
Spike timing dependent plasticity finds the start of re-
peating patterns in continuous spike trains. PloS one,
3(1):e1377.
Moeys, D. P., Corradi, F., Kerr, E., Vance, P., Das, G., Neil,
D., Kerr, D., and Delbr
¨
uck, T. (2016). Steering a
predator robot using a mixed frame/event-driven con-
volutional neural network. In Event-based Control,
Communication, and Signal Processing (EBCCSP),
2016 Second International Conference on, pages 1–8.
IEEE.
Mueggler, E., Gallego, G., and Scaramuzza, D. (2015).
Continuous-time trajectory estimation for event-based
vision sensors. In Robotics: Science and Systems XI,
number EPFL-CONF-214686.
Orchard, G., Jayawant, A., Cohen, G. K., and Thakor, N.
(2015). Converting static image datasets to spiking
neuromorphic datasets using saccades. Frontiers in
neuroscience, 9:437.
Posch, C. and Matolin, D. (2011). Sensitivity and unifor-
mity of a 0.18µm cmos temporal contrast pixel ar-
ray. In 2011 IEEE International Symposium of Cir-
cuits and Systems (ISCAS), pages 1572–1575. IEEE.
Posch, C., Matolin, D., and Wohlgenannt, R. (2011). A
qvga 143 db dynamic range frame-free pwm image
sensor with lossless pixel-level video compression and
time-domain cds. IEEE Journal of Solid-State Cir-
cuits, 46(1):259–275.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Convolutional Neural Network for Detection and Classification with Event-based Data
207

Ruedi, P.-F., Heim, P., Kaess, F., Grenet, E., Heitger, F.,
Burgi, P.-Y., Gyger, S., and Nussbaum, P. (2003).
A 128/spl times/128 pixel 120-db dynamic-range
vision-sensor chip for image contrast and orienta-
tion extraction. IEEE Journal of Solid-State Circuits,
38(12):2325–2333.
Scholkopf, B. and Smola, A. J. (2001). Learning with ker-
nels: support vector machines, regularization, optimi-
zation, and beyond. MIT press.
Serrano-Gotarredona, T. and Linares-Barranco, B. (2015).
Poker-dvs and mnist-dvs. their history, how they were
made, and other details. Frontiers in neuroscience,
9:481.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sironi, A., Brambilla, M., Bourdis, N., Lagorce, X., and
Benosman, R. (2018). Hats: Histograms of avera-
ged time surfaces for robust event-based object clas-
sification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1731–1740.
Son, B., Suh, Y., Kim, S., Jung, H., Kim, J.-S., Shin, C.,
Park, K., Lee, K., Park, J., Woo, J., et al. (2017). 4.1 a
640× 480 dynamic vision sensor with a 9µm pixel and
300meps address-event representation. In Solid-State
Circuits Conference (ISSCC), 2017 IEEE Internatio-
nal, pages 66–67. IEEE.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2818–2826.
Taverni, G., Moeys, D. P., Li, C., Cavaco, C., Motsnyi, V.,
Bello, D. S. S., and Delbruck, T. (2018). Front and
back illuminated dynamic and active pixel vision sen-
sors comparison. IEEE Transactions on Circuits and
Systems II: Express Briefs, 65(5):677–681.
Viola, P., Jones, M. J., and Snow, D. (2003). Detecting
pedestrians using patterns of motion and appearance.
In null, page 734. IEEE.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European confe-
rence on computer vision, pages 818–833. Springer.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
208
