
Indoor Scenes Understanding for Visual Prosthesis
with Fully Convolutional Networks
Melani Sanchez-Garcia
1
, Ruben Martinez-Cantin
1,2
and Jose J. Guerrero
1
1
I3A, Universidad de Zaragoza, Spain
2
Centro Universitario de la Defensa, Zaragoza, Spain
Keywords:
Image Understanding, Fully Convolutional Network, Visual Prosthesis, Simulated Prosthetic Vision.
Abstract:
One of the biggest problems for blind people is to recognize environments. Prosthetic Vision is a promising
new technology to provide visual perception to people with some kind of blindness, transforming an image to
a phosphenes pattern to be sent to the implant. However, current prosthetic implants have limited ability to
generate images with detail required for understanding an environment. Computer vision play a key role in
providing prosthetic vision to alleviate key restrictions of blindness. In this work, we propose a new approach
to build a schematic representation of indoor environments for phosphene images. We combine computer
vision and deep learning techniques to extract structural features in a scene and recognize different indoor
environments designed to prosthetic vision. Our method uses the extraction of structural informative edges
which can underpin many computer vision tasks such as recognition and scene understanding, being key for
conveying the scene structure. We also apply an object detection algorithm by using an accurate machine
learning model capable of localizing and identifying multiple objects in a single image. Further, we represent
the extracted information using a phosphenes pattern. The effectiveness of this approach is tested with real
data from indoor environments with eleven volunteers.
1 INTRODUCTION
According to the World Health Organization (WHO)
the estimated number of people with moderate to se-
vere visual impairment is 285 million (Pascolini and
Mariotti, 2012). Implantable prosthetic vision has
become a way to stimulate the surviving neurons
in the retina providing a very low visual resolution.
These devices aim to create visual sensations known
as phosphenes through processing the input from a ca-
mera by a computer. As a result, blindness people can
perceive simple patterns in the form of a set of phos-
phenes (Guo et al., 2010). Current commercial im-
plants range from 60 to 1500 electrode arrays, which
corresponds to pseudo-images of less than 40 by 40
pixels. Furthermore, the stimulation of those elec-
trodes is limited in the sense that only few intensity
levels can be identified by the user with slow stimula-
tion and recovery times (Luo and Da Cruz, 2014).
Although progress has been made with these
prostheses, there are currently some restrictions such
as limited visual acuity due to biological challenges,
manufacturing constraints and physical restraints (Ei-
ber et al., 2013). The low bandwidth of these prost-
heses causes the loss of visual information perceived
like color, texture, brightness and edges, which is es-
sential for blind people to carry out daily tasks such
as navigate and walk safely (Vergnieux et al., 2014)
or object recognition and localization (Mac
´
e et al.,
2015). Thus, it becomes of paramount importance to
encode the input information of the environment pro-
perly in a way that it can be transmitted efficiently to
the subject through the phosphene array.
Following the standard practice in the literature,
we use Simulated Prosthetic Vision (SPV) to evaluate
the efficacy of visual perceptions in visual prostheses.
We also assume that the device includes an external
sensor, i.e. a camera, to perceive the scene. Most
of the current approaches of SPV use image proces-
sing techniques to enhance the perceptions preserving
the relevant content of the image (Ayton et al., 2013).
This may help to identify regions of interest and high-
light the location of objects in the scene. Since only
hundreds of pixels are available, both the contrast dif-
ference and the edges become very important in terms
of the details to be represented in the image.
For image understanding and computer vision,
deep learning has recently revolutionized the field
218
Sanchez-Garcia, M., Martinez-Cantin, R. and Guerrero, J.
Indoor Scenes Understanding for Visual Prosthesis with Fully Convolutional Networks.
DOI: 10.5220/0007257602180225
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 218-225
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

Input
image
Structural Informative
Edges (SIE)
Object Mask
Segmentation (OM)
Schematic
representation
(SIE-OM)
Phosphenic image
(SIE-OM)
Phosphenic image
(OM)
R-CNN
FCN-EI
Object label
Figure 1: An overview of our approach. We present a new approach of image processing for Simulated Prosthetic Vision.
From an input image we used Deep Learning algorithms to enhance relevant features in a scene. Structural Informative Edges
(SIE) are generated from (Mallya and Lazebnik, 2015) and Objects Masks Segmentation (OM) are generated from (He et al.,
2017). The extracted information is superimposed (SIE-OM) to subsequently create the phosphenic image.
from the seminal work of (LeCun et al., 1989) to the
groundbreaking results of (Krizhevsky et al., 2012).
Concretely, convolutional neural networks (CNNs)
have achieved state of the art results in different tasks
such as object detection (Anisimov and Khanova,
2017), layout estimation (Dasgupta et al., 2016) and
semantic segmentation (Gu et al., 2017). The use
of deep networks could suppose an advance in SPV
since they can be used to carry out representations
of environments, leading to large improvements in
visual perceptions restored by current low-resolution
implants (Sanchez-Garcia et al., 2018).
The contribution of this paper is twofold. First,
we present a new approach of phosphenic image ge-
neration based on the combination of relevant object
detection and segmentation and the detection of struc-
tural edges in indoor scenes. Our image processing
pipeline is shown in Figure 1. Second, we performed
an experiment with multiple subjects to validate the
performance of our proposal for indoor scene recog-
nition. We also compared the performance of the sub-
jects with a classical method to obtain low bandwidth
information such as edge detection (see Figure 2).
2 PHOSPHENE GENERATION
USING DEEP LEARNING
2.1 Phosphene Generation Strategies
In this work, we focused on the schematic represen-
tation of indoor environments through deep networks.
The goal is to improve the ability to understand unfa-
miliar environments for simulated prosthetic vision.
However, the limitation of the low resolution presen-
ted by the visual prosthesis means that we have to
focus on extracting the most significant information
such as structural edges or simple objects.
We opted to extract the structural informative ed-
ges of indoor scenes that are informative about the
layout of a room. These structural edges are those
formed by the intersections of room faces (two walls,
wall and ceiling, wall and floor). To accomplish this,
we choose a fully convolutional network proposed in
(Mallya and Lazebnik, 2015) for pixel-wise labeling
that learn to predict ’structural informative edges’ for
different structures of indoor scenes. We also used a
new convolutional network approach proposed in (He
et al., 2017) focused on the segmentation of object
instances in order to extract more information from
Indoor Scenes Understanding for Visual Prosthesis with Fully Convolutional Networks
219

Figure 2: Steps of image processing by using classical Canny method. a) Input image, b) contrast and brightness enhancement
c) grayscale histogram equalization, d) canny edge detection, e) image expansion, f) phosphenic image.
the scene through segmentation and later the masks
generation of relevant objects. After structural infor-
mative edges and object segmentation masks are ex-
tracted, we further propose two image enhancement
strategies: - Object mask (OM), and a schematic re-
presentation formed by - Structural Informative Edges
combined with Object mask (SIE-OM) to enhance the
limited visual perception under SPV (Figure 1).
2.2 Structural Informative Edges
In the literature exist different approaches for recove-
ring and predicting the layout of an indoor scene (He-
dau et al., 2012; Schwing et al., 2012). Our idea was
centered on finding edges that are very informative
about the structure of a room. Unfortunately, most of
these edges are not always visible since the presence
of objects in the room occlude them. The neural net-
work proposed in (Mallya and Lazebnik, 2015) is ba-
sed on a Fully Convolutional Network (FCN) where
given an image, it determines the informative edge
map of the image. The idea of using this CNN to
predict informative edges motivates us to extract di-
rectly structural edges of rooms as relevant informa-
tion to understand the layout of the room in a sche-
matic way. For training this FCN, they use the data-
set from (Hedau et al., 2009) which achieve state-of-
the-art results on the LSUN dataset (Mallya and La-
zebnik, 2015). This network has the particularity that
it is trained for two joint tasks. The first task is based
on the prediction of the informative edge map gene-
rating a binary mask of each of the three types of ed-
ges (wall/wall, wall/ceiling, wall/floor) in the layout.
The second trained task is based on the prediction of
geometric contexts labels. This labels correspond to
different room faces plus an object or cluster label. In
this FCN, the total loss is considered as the sum of
the two cross-entropy classification losses: for the in-
formative edge label prediction and for the geometric
context label prediction. Figure 3 (left center) shows
examples of structural informative edges detected on
different indoor scenes.
2.3 Object Mask Segmentation
We also use the Mask R-CNN method (He et al.,
2017) to extract a segmentation mask of objects.
Mask R-CNN goes beyond with the novelty of pro-
viding an object mask after its segmentation, which is
interesting to select and extract objects from the ima-
ges to later represent it under simulated prosthetic vi-
sion. Its approach is summarized in two parts; the
first is centered on a convolutional network used for
the extraction of features on an entire image, and the
second corresponding to the network head for the re-
cognition of bounding box (classification and regres-
sion) and mask prediction. This is illustrated in Figure
3 (center).
For this work, we developed two image processing
strategies for the input scenes.
2.3.1 Object Mask (OM)
For this strategy, we started making a selection of ob-
jects that we considered most relevant in each type
of room to subsequently segment and extract a mask
for each of them by using the framework of (He et al.,
2017). The rest of the information present in the scene
were removed. Figure 3 (center) shows examples of
the extracted masks from the segmentation of the dif-
ferent objects selected for each type of room. The
objects masks extracted from the original images are
used to create a schematic representation of the ind-
oor scene. Then, the pixels were reduce to 40x40 and
they were represented by simple phosphenes pattern
using the approach considered in (Bermudez-Cameo
et al., 2017) (see Figure 4).
2.3.2 Structural Informative Edges and Object
Mask (SIE-OM)
Here, we proposed a new image processing method
based on two neural networks (Mallya and Lazebnik,
2015; He et al., 2017). This method is derived from
OM method but we added the structural informative
edges extracted with (Mallya and Lazebnik, 2015). In
the same way as in the previous method, the pixels
were reduce to 40x40 and they were represented by
the phosphenes pattern. Figure 3 (right center) shows
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
220
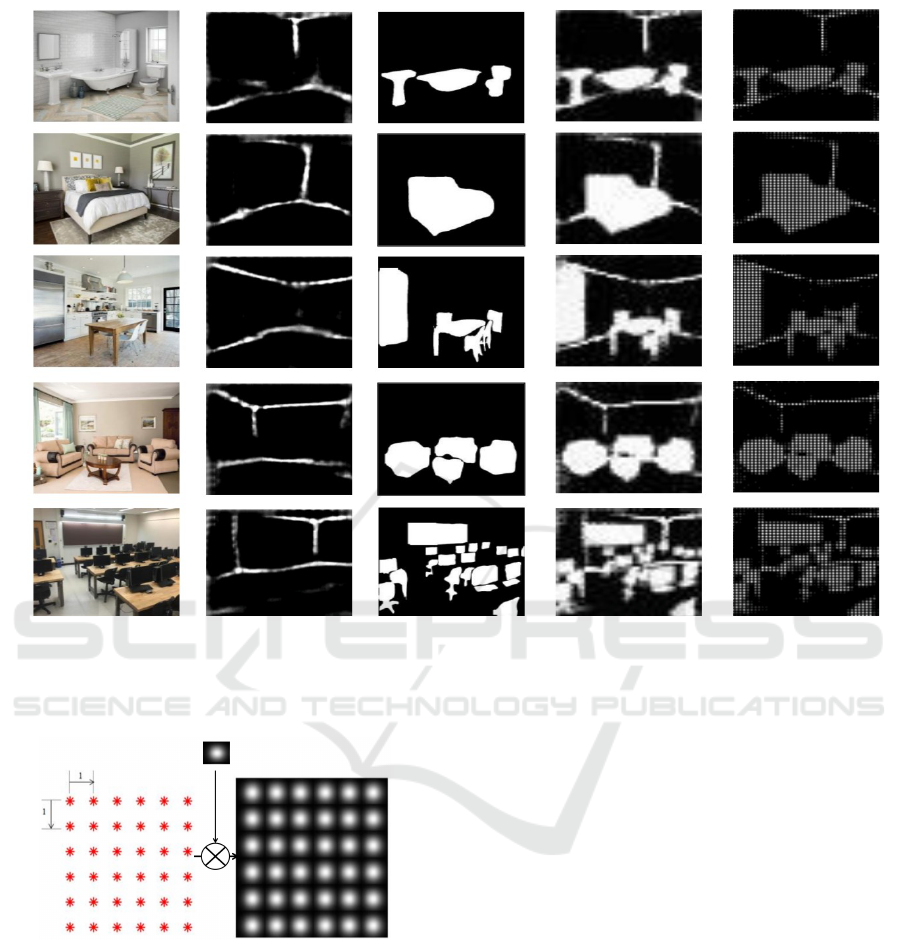
Figure 3: Each row shows an example of indoor scene. The first column shows the input image. The next column shows the
structural informative edges of the room. Column three shows the objects masks (OM) and in the fourth column the results
of the two convolutional neural networks are represented in the same image (SIE-OM). In the last column, the images are
represented by a phosphenes pattern.
Gaussian profile
Figure 4: Simulation of phosphene map. Left: Phosp-
hene configuration to create a square grid. Right: Gaussian
smoothing applied to the square grid.
examples of schematic representation (SIE-OM) of
indoor scenes.
3 EXPERIMENTAL SETUP
3.1 Participants
Eleven subjects (two women and nine men) were vo-
lunteered in the experiment. The subjects were bet-
ween 20 and 36 years old and they were not familiar
with the setup and the SPV.
3.2 Ethics Statement
All of the experimental process were conducted ac-
cording to the ethical recommendations of the Decla-
ration of Helsinki. All subjects were informed about
the purpose of the experiment. They could leave the
study at any time.
3.3 Phosphene Images
Ten indoor images were collected and were cropped
to a size which covered a visual angle of 20
◦
(dia-
gonally) to correspond to epiretinal prostheses (Zhou
et al., 2013). Then, the resolution of the images were
adjusted to 40x40 pixels. We processed five different
types of indoor scenes using the image processing
strategies from Section 2.1. Similarly to many SPV
studies such as in (Chen et al., 2009), phosphenes are
approximated as grayscale circular dots with a Gaus-
sian luminance profile (Figure 4). The representation
Indoor Scenes Understanding for Visual Prosthesis with Fully Convolutional Networks
221
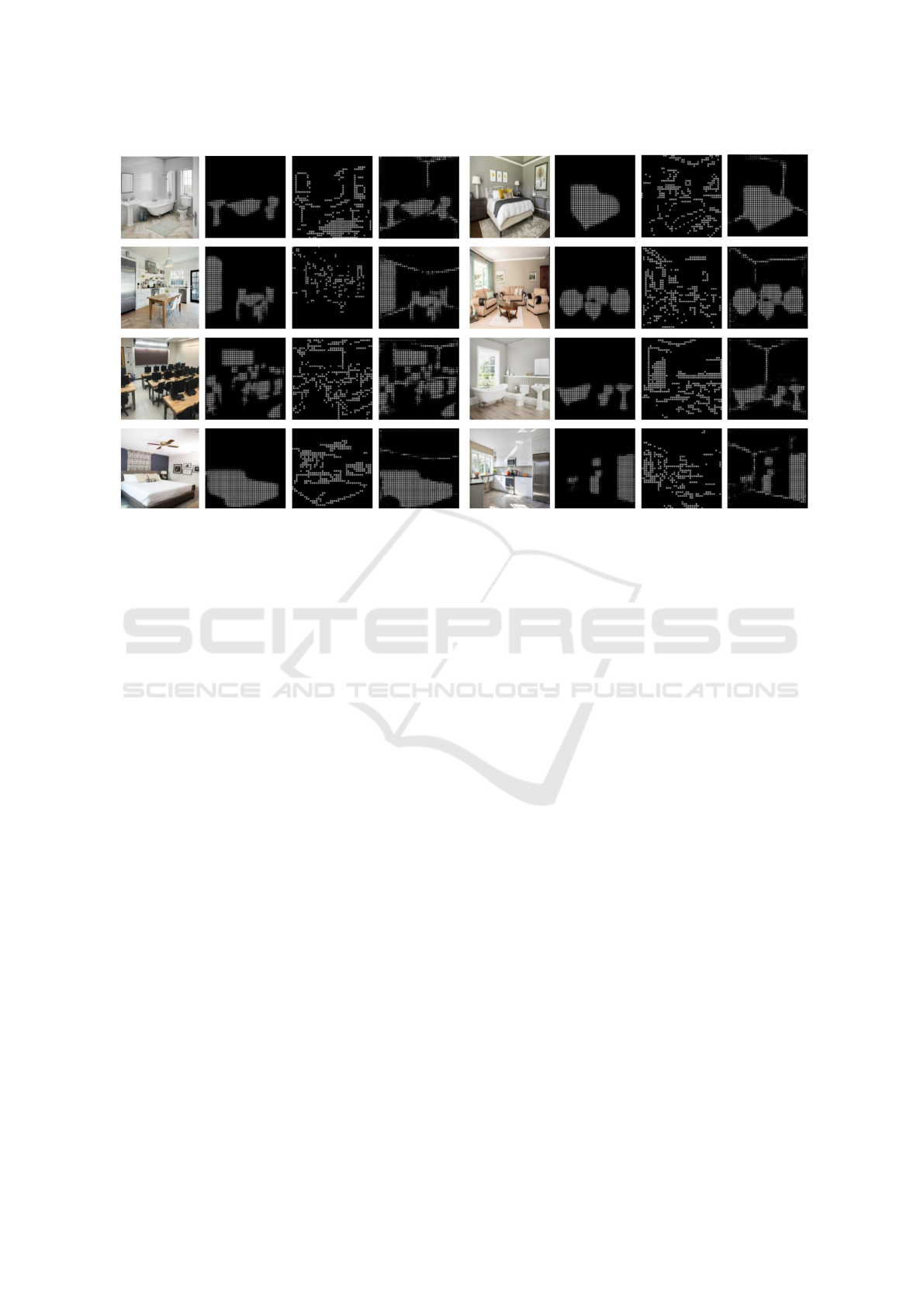
Figure 5: Eight examples of indoor environments represented with 1600 phosphenes. We wanted to show the difference of
using a classic method of image processing and a new approaches based on deep learning techniques. Each column show
original images, images processed by using OM method, images processed by using Canny method and images processed by
our method SIE-OM, respectively.
of the scenes includes six intensity levels of phosp-
henes, to present the structural informative edges and
objects masks in white and gray. Figure 5 gives ex-
amples of phosphenic images processed by some of
the methods described above (OM and SIE-OM).
3.4 Procedure
Subjects had to perform two different tasks based on
object identification and room type recognition with
a sequence of images presented on a monitor. A
brief introduction of different tasks procedures was
given verbally to all the subjects before the experi-
ment. Besides, subjects were informed about the dif-
ferent types of rooms and objects that they were going
to see. But they were not informed about the num-
ber of objects in each image. The global task of the
experiments was to recognize an indoor environment
among five types of rooms and the possible objects
presents in each scene. Our selection of images inclu-
ded bathrooms, bedrooms, kitchens, living rooms and
offices, and the selection of objects was composed by
toilets, sinks, baths, refrigerators, ovens/microwaves,
tables, chairs, TV’s/laptops, beds and couches.
There were two different tasks in the formal tests.
The first task was composed by sixteen images of dif-
ferent indoor environments, each one processed in the
methods presents in this document. The image pre-
sentation sequence was randomized for each subject.
Their task were to recognize different objects in the
phosphenic images. For this, they had to mark with
a cross the boxes in a quiz of the objects identified
in each image. The second task was to identify the
type of room to which each image corresponds, i.e.
they had to determine room types based on what they
were seeing on each phosphenic image. Moreover,
they had to mark with a cross the certainty with which
they were able to recognized it according to the Likert
ranking explained later. After each test image, the
next image was configured consecutively. The time
allotted for each image is limited to 30 seconds. The
whole experiment had an average duration of 15 mi-
nutes per subject.
4 RESULTS
We compared the two methods present in Section 2.1
with a baseline method using classical image proces-
sing tools. This baseline, which we called Canny, is
focused on the Canny Edge Detection algorithm that
it is typically used for image processing in SPV (Do-
wling et al., 2004). The performance of this method
is based on detecting the edges in an image. Here,
the amount of data is significantly reduced, while the
important structural properties of the image are pre-
served. To improve the perception of the information
present in the image, we perform six steps for this
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
222

Table 1: Comparison of responses of the three different methods (Canny, OM and SIE-OM) on object identification and room
type recognition tasks. The assurance of the three methods was evaluated with the Likert ranking.
Method
Object
Identified
Object Not
Identified
% Correct Object
Identification
% Room
Recognized
% Level of Confidence
%C %I %C %I DY PY M PN DN
Canny 7 2 72 17 79 32 0 14 9 23 55
OM 13 5 74 10 87 41 9 32 23 23 14
SIE-OM 13 1 75 10 88 55 27 18 27 5 23
Table 2: Summary of responses of ten images of different indoor environments processed by using SIE-OM method. The
performance is evaluated with the percentage of objects and room types correctly and incorrectly identified. For most of the
images a high percentage of successes was obtained in the identification of objects. In the case of the room type recognition,
the average success result was 58%. The majority of responses were identified with ‘DY’ and ‘PY’, which indicates that the
subjects understood the visualized scenes.
Image Type
Object
Identified
Object Not
Identified
% Correct Object
Identification
% Room
Recognized
% Level of Confidence
%C %I %C %I DY PY M PN DN
Bathroom 1 23 2 68 7 91 64 64 9 18 0 9
Kitchen 2 13 5 67 15 80 55 0 27 36 18 18
Bedroom 3 10 0 90 0 100 82 55 36 0 0 9
Living room 4 7 0 90 3 97 55 9 45 9 27 9
Office 5 20 1 69 10 89 64 0 55 27 9 9
Bathroom 6 28 0 70 2 98 82 82 18 0 0 0
Kitchen 7 17 2 70 11 87 9 18 45 27 9 0
Bedroom 8 4 6 84 6 87 36 45 36 9 9 0
Living room 9 17 1 79 3 96 82 27 55 9 9 0
Office 10 23 2 70 5 93 55 0 36 36 18 9
Total 16 2 76 6 92 58 30 36 17 10 6
method (see Figure 2). To extract the contours with
Canny method we carefully selected the the thres-
holds for each type of room (from 0.25 to 0.4) to pro-
vide optimal performance for each image. In the same
way, we selected each line size for image expansion.
Note that our approach from Section 2.1 is fully auto-
mated requiring no parameter.
The results fall into two main sections: object
identification and room type recognition tasks. To
obtain the results we collected the percentage of ‘Cor-
rect’ (C) and ‘Incorrect’ (I) responses in both tasks.
We also analyzed the responses with the Likert ran-
king; the responses marked as ‘Definitely yes’ (DY),
‘Probably yes’ (PY), ‘Maybe’ (M) and ‘Probably no’
(PN) were assumed as the subject had thought that
they had recognized the type of room related to the
visualized image. It was assumed that the responses
selected as ‘Definitely no’ (DN) meant that subjects
did not understand the type of room witnessed (see
Table 1 and Table 2).
4.1 Object Identification
Canny method had the less percentage of objects iden-
tified correctly, compared to OM and SIE-OM met-
hods. Besides, Canny images had a 55% of ‘DN’ re-
sponses, which suggests that most of the images were
not understood by the subjects. The main reason was
perhaps the Canny method extracts too much infor-
mation that is difficult to understand when the images
have low resolution. This confirmed that this method
is not very useful at low resolutions. In contrast, there
was no significant difference between OM and SIE-
OM. This is due to the way to represent the objects
in the scene was the same for both methods. Furt-
hermore, this suggests that the representation of the
structural informative edges in SIE-OM do not pro-
vide much information in the identification of objects.
Looking at the results obtained only for the SIE-
OM method, the total percentage of correct object
identification task was very high, of 88%. Moreover,
the highest percentage of confidence with which they
had performed the task is distributed among the re-
sponse of ‘DY’ and ‘PY’, which means that subjects
could identify the objects easily.
4.2 Room Type Recognition
SIE-OM method had a higher percentage of correct
responses for the room type recognition (55%) than
the OM (41%) and the Canny method (32%). We also
observed that SIE-OM method had a slightly better
performance than the OM method. This suggest that
given information of structural edges, scenes provide
Indoor Scenes Understanding for Visual Prosthesis with Fully Convolutional Networks
223

Table 3: Confusion matrix results of room type recognition by using SIE-OM method. The results show that some subjects
confused room types due to the similarity of the objects present in them. Even so, high precision was obtained for our
proposed method.
Actual\Predicted Bathroom Kitchen Bedroom Living room Office Total Recall
Bathroom 0.91 0.00 0.00 0.09 0.00 1.00 90.91
Kitchen 0.05 0.45 0.10 0.30 0.10 1.00 45.00
Bedroom 0.00 0.00 0.67 0.33 0.00 1.00 66.67
Living room 0.00 0.00 0.00 0.95 0.05 1.00 95.24
Office 0.00 0.00 0.00 0.20 0.80 1.00 80.00
Total 0.96 0.45 0.77 1.88 0.95 5.00
Precision 94.79 100.00 86.96 50.75 84.42
Figure 6: Correct results of room type recognition task
obtained by the three methods, with responses of ‘DN’ and
without responses of ‘DN’. This suppose an increase in the
results of our approach (SIE-OM).
more information when it comes to recognizing the
type of room. Figure 6 shows the results on Table 1
compared to the results obtained in the same way but
counting as null the responses marked in the Likert
ranking as ‘DN’. This supposed a significant increase
in the successes of the room recognition for SIE-OM
method.
Looking at the results of our method, the average
percentage obtained of correct responses was 58%.
The responses of ‘DY’ comprised 30% of responses
to all images. Instead, responses selected as ‘DN’
comprised only 6%. This means that subjects could
recognize the type of room with a very high certainty
with this method (Table 2). In Table 3 is shown the
confusion matrix to evaluate the accuracy of our mo-
del in the room type recognition. According to the
results obtained for the room classification, many sub-
jects confused kitchen with living room. This was due
to the presence of tables and chairs in both images.
For the same reason, they also confused office with
living room. On the other hand, bedroom was confu-
sed with living room because the similarity of shape
between some beds and couches. Even so, the recall
and precision of our model were very high, reaching
in some cases 100%.
5 CONCLUSION
We introduced a new approach for simulated visual
prosthesis based on computer vision and deep lear-
ning algorithms to understand and recognize five ty-
pes of indoor environments representing the informa-
tion by simple phosphenes pattern. To address this
issue, we used two deep learning techniques propo-
sed by (Mallya and Lazebnik, 2015) and (He et al.,
2017) to extract different relevant information from
the scenes. To verify this method, we compared it to a
classical method of image processing and we studied
the effectiveness of the simulated prosthetic vision.
Our overall research has demonstrated that deep
learning algorithms can make better use of the limi-
ted resolution by highlighting salient features such as
structural edges and object segmentation for simula-
ted prosthetic vision. The results show that the new
approach proposed has a good performance in the re-
cognition of indoor environments even taking it to a
low resolution. As future work we consider enlarge
the number of images to evaluate our method with
subjects.
ACKNOWLEDGEMENTS
This work was supported by project DPI2015-65962-
R (MINECO/FEDER, UE) and BES-2016-078426
(MINECO).
REFERENCES
Anisimov, D. and Khanova, T. (2017). Towards light-
weight convolutional neural networks for object de-
tection. In Advanced Video and Signal Based Surveil-
lance (AVSS), 2017 14th IEEE International Confe-
rence on, pages 1–8. IEEE.
Ayton, L. N., Luu, C. D., Bentley, S. A., Allen, P. J., and
Guymer, R. H. (2013). Image processing for visual
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
224

prostheses: a clinical perspective. In Image Proces-
sing (ICIP), 2013 20th IEEE International Conference
on, pages 1540–1544. IEEE.
Bermudez-Cameo, J., Badias-Herbera, A., Guerrero-Viu,
M., Lopez-Nicolas, G., and Guerrero, J. J. (2017).
Rgb-d computer vision techniques for simulated
prosthetic vision. In LNCS 10255, Pattern Recogni-
tion and Image Analysis, pages 427–436. Springer.
Chen, S. C., Suaning, G. J., Morley, J. W., and Lovell, N. H.
(2009). Simulating prosthetic vision: I. visual models
of phosphenes. Vision research, 49(12):1493–1506.
Dasgupta, S., Fang, K., Chen, K., and Savarese, S. (2016).
Delay: Robust spatial layout estimation for cluttered
indoor scenes. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
616–624.
Dowling, J. A., Maeder, A., and Boles, W. (2004). Mobility
enhancement and assessment for a visual prosthesis.
In Medical Imaging 2004: Physiology, Function, and
Structure from Medical Images, volume 5369, pages
780–792. International Society for Optics and Photo-
nics.
Eiber, C. D., Lovell, N. H., and Suaning, G. J. (2013). At-
taining higher resolution visual prosthetics: a review
of the factors and limitations. Journal of neural engi-
neering, 10(1):011002.
Gu, J., Wang, Z., Kuen, J., Ma, L., Shahroudy, A., Shuai, B.,
Liu, T., Wang, X., Wang, G., Cai, J., et al. (2017). Re-
cent advances in convolutional neural networks. Pat-
tern Recognition.
Guo, H., Qin, R., Qiu, Y., Zhu, Y., and Tong, S. (2010).
Configuration-based processing of phosphene pattern
recognition for simulated prosthetic vision. Artificial
organs, 34(4):324–330.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Computer Vision (ICCV), 2017
IEEE International Conference on, pages 2980–2988.
IEEE.
Hedau, V., Hoiem, D., and Forsyth, D. (2009). Recovering
the spatial layout of cluttered rooms. In Computer
vision, 2009 IEEE 12th international conference on,
pages 1849–1856. IEEE.
Hedau, V., Hoiem, D., and Forsyth, D. (2012). Recove-
ring free space of indoor scenes from a single image.
In Computer Vision and Pattern Recognition (CVPR),
2012 IEEE Conference on, pages 2807–2814. IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in Neural Information Pro-
cessing Systems (NIPS).
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Ho-
ward, R. E., Hubbard, W., and Jackel, L. D. (1989).
Backpropagation applied to handwritten zip code re-
cognition. Neural computation, 1(4):541–551.
Luo, Y. H.-L. and Da Cruz, L. (2014). A review and update
on the current status of retinal prostheses (bionic eye).
British medical bulletin, 109(1):31–44.
Mac
´
e, M. J.-M., Guivarch, V., Denis, G., and Jouffrais, C.
(2015). Simulated prosthetic vision: The benefits of
computer-based object recognition and localization.
Artificial organs, 39(7).
Mallya, A. and Lazebnik, S. (2015). Learning informa-
tive edge maps for indoor scene layout prediction. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 936–944.
Pascolini, D. and Mariotti, S. P. (2012). Global estimates of
visual impairment: 2010. British Journal of Ophthal-
mology, 96(5):614–618.
Sanchez-Garcia, M., Martinez-Cantin, R., and Guerrero,
J. J. (2018). Structural and object detection for phos-
phene images. arXiv preprint arXiv:1809.09607.
Schwing, A. G., Hazan, T., Pollefeys, M., and Urtasun, R.
(2012). Efficient structured prediction for 3d indoor
scene understanding. In Computer Vision and Pattern
Recognition (CVPR), 2012 IEEE Conference on, pa-
ges 2815–2822. IEEE.
Vergnieux, V., Mac
´
e, M. J.-M., and Jouffrais, C. (2014).
Wayfinding with simulated prosthetic vision: Per-
formance comparison with regular and structure-
enhanced renderings. In Engineering in Medicine
and Biology Society (EMBC), 2014 36th Annual Inter-
national Conference of the IEEE, pages 2585–2588.
IEEE.
Zhou, D. D., Dorn, J. D., and Greenberg, R. J. (2013). The
argus
R
ii retinal prosthesis system: An overview. In
2013 IEEE International Conference on Multimedia
and Expo Workshops (ICMEW), pages 1–6. IEEE.
Indoor Scenes Understanding for Visual Prosthesis with Fully Convolutional Networks
225
