
Supervised Spatial Transformer Networks for Attention Learning in
Fine-grained Action Recognition
Dichao Liu
1
, Yu Wang
2
and Jien Kato
3,∗
1
Graduate School of Informatics, Nagoya University, Nagoya City, Japan
2
Graduate School of International Development, Nagoya University, Nagoya City, Japan
3
College of Information Science and Engineering, Ritsumeikan University, Kusatsu City, Japan
Keywords:
Action Recognition, Video Understanding, Attention, Fine-grained, Deep Learning.
Abstract:
We aim to propose more effective attentional regions that can help develop better fine-grained action re-
cognition algorithms. On the basis of the spatial transformer networks’ capability that implements spatial
manipulation inside the networks, we propose an extension model, the Supervised Spatial Transformer Net-
works (SSTNs). This network model can supervise the spatial transformers to capture the regions same as
hard-coded attentional regions of certain scale levels at first. Then such supervision can be turned off, and the
network model will adjust the region learning in terms of location and scale. The adjustment is conditioned
to classification loss so that it is actually optimized for better recognition results. With this model, we are
able to capture attentional regions of different levels within the networks. To evaluate SSTNs, we construct a
six-stream SSTN model that exploits spatial and temporal information corresponding to three levels (general,
middle and detail). The results show that the deep-learned attentional regions captured by SSTNs outperform
hard-coded attentional regions. Also, the features learned by different streams of SSTNs are complementary
to each other and better result is obtained by fusing the features.
1 INTRODUCTION
Action recognition aims to recognize human actions
from a series of observations, such as video clips and
image sequences. Fine-grained action recognition is a
subclass of action recognition. The term fine-grained
is used similarly in (Rohrbach et al., 2012; Singh
et al., 2016), suggesting that discriminative informa-
tion among different action classes is very subtle. As
shown in Fig. 1, an ordinary action recognition task
may require algorithms to distinguish between com-
pletely different actions. Whereas, fine-grained action
recognition task may require the differentiation of dif-
ferent processes in the same activity. Fine-grained
action recognition is important, useful but also very
difficult. One of the main reasons is that the discri-
minative information among different action classes
is very subtle. Thus, it is difficult to obtain enough
clues from such limited information. It would be pre-
ferable to exploit more comprehensive information
(multi-type and multi-level).
It is quite common for fine-grained action recog-
∗
Corresponding author
(a) (b)
Figure 1: Example of action categories of a general action
recognition task (a) (Soomro et al., 2012) and a fine-grained
action recognition task (b) (Rohrbach et al., 2012). It is
obvious that the differences among different classes in the
fine-grained action recognition task are more subtle.
nition that the discriminative information is only con-
tained in certain parts of a frame while the remaining
parts are redundant. Some studies refer such discri-
minative parts as attentional regions and try to uti-
lize attentional regions rather than full frames to deve-
lop recognition algorithm (Cherian and Gould, 2017;
Ch
´
eron et al., 2015). The utilization of attentional re-
gion is effective because attentional regions can pro-
vide more detailed information and help reduce re-
dundancy. However, the problems of current studies
include the following: (1) they mainly utilize hard-
Liu, D., Wang, Y. and Kato, J.
Supervised Spatial Transformer Networks for Attention Learning in Fine-grained Action Recognition.
DOI: 10.5220/0007257803110318
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 311-318
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311

coded approaches (Cherian and Gould, 2017; Ch
´
eron
et al., 2015), and cannot always obtain the “right”
attentional region (most hard-coded methods assume
attentional regions to be person-centric, which is not
true sometimes); (2) they only explore a certain scale
of regions and ignore the possibly discriminative in-
formation shown in other scales.
Focusing on solving these issues, we turn our
eyes to spatial transformer networks (STNs) (Jader-
berg et al., 2015). STNs allow multiple transforma-
tions on input images to make the transformed ima-
ges to be better recognized. We hope to make use of
this capability to learn attentional regions in an end-
to-end style. By doing so, all factors influencing the
performance (including how to locate and recognize
the attentional regions) can be optimized together to-
ward the target of better recognition results. However,
the problem is that it is extremely hard to let STNs to
handle all the intended tasks with the only supervision
signal—category labels, especially when we want to
capture more detailed information.
In this work, we propose supervised spatial trans-
former networks (SSTNs), which has a mechanism
named regressive guiding. Regressive guiding lets
spatial transformers to capture the regions same as
hard-coded attentional regions of certain scales by
regression. With SSTNs, we can first guide the
networks to capture attentional regions (rather than
performing other transformations) of intended sca-
les. Then we turn off regressive guiding and let the
networks to adjust region localization by themselves
(with only categorical information). Finally, the deep-
learned attentional regions from SSTNs will focus on
more meaningful and discriminative parts.
To throughout evaluate the attentional regions
captured by SSTNs, we built SSTNs of six streams,
which captures two types of information (RGB fra-
mes and optical flows) in three levels(detail, middle
and general). Those SSTNs are then proved to be
more effective than the STNs in the same cases for
capturing deep-learned attentional regions. Then for
comparison, we also train six streams of CNNs on the
relevant hard-coded attentional regions (RGB frames
and optical flows from detail to general level). We
then compare the recognition performance between
those SSTNs and CNNs. We first use this SSTNs/
CNNs to extract deep features for every frame in a
video clip and then aggregate those frame-level fea-
tures to be video-level descriptors by temporal cor-
relation pooling (TCP) (Cherian and Gould, 2017).
The results demonstrate that the deep-learned attenti-
onal regions perform better than the hard-coded ones.
The attentional regions captured by SSTNs are more
action-centric rather than person-centric as the hard-
coded ones. The results also show that the six SSTNs
streams are complementary to each other, and fusing
them can bring better performance.
2 RELATED WORKS
Recently, the studies on action recognition has de-
veloped a lot from traditional shallow approaches to
newly-developed deep approaches. Shallow methods
derives the properties using the information contained
in the videos themselves (Wang et al., 2011; Wang
et al., 2013; Dalal et al., 2006), and have been pro-
ved to be effective. However, the deep methods, es-
pecially the CNNs, further boost the performance of
action recognition (Le et al., 2011; Wang et al., 2016;
Simonyan and Zisserman, 2014a; Wang et al., 2015;
Feichtenhofer et al., 2016), such as the two-stream
models (Wang et al., 2016; Simonyan and Zisserman,
2014a; Wang et al., 2015; Feichtenhofer et al., 2016).
In two-stream models, one of the streams is fed with
RGB frames to capture spatial information. The other
is fed with optical flows to capture motion informa-
tion. Our work is also inspired by two-stream models.
We exploit both spatial and temporal information.
In fine-grained visual recognition, discriminative
clues are always very subtle. For avoiding redun-
dancy, some works make effort to find and learn the
regions of interest rather than the entire scenes. Such
effort can be divided into two types, namely hard-
coded attention and deep-learned attention. Hard-
coded attention generally selects the attentional re-
gions before learning them. The selection is always
implemented by solving a certain statistical problem,
which always strongly relays on human’s expert kno-
wledges (Ba et al., 2015). The selected regions can
then be learned by recognition algorithms. Deep-
learned attention is generally implemented with cer-
tain learnable mechanisms designed for attention le-
arning, which can be embedded within the networks.
Such attention-learning models can be trained toget-
her with the recognition networks by standard back-
propagation. For example, (Li et al., 2018) generates
video saliency maps for locating attentions with the
feature maps from VideoLSTM, which is able to si-
multaneously exploit multiple video information (ap-
pearance, motion and attention). By doing so, (Li
et al., 2018) brings relevant spatial-temporal locations
for video-based attentional regions. Another example
is (Sharma et al., 2015), which takes the 7 ×7×1024-
D feature cubes from CNNs as the inputs of their
LSTM-based attention model.
Among those works, our work is mainly inspi-
red by (Jaderberg et al., 2015). For recognizing fine-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
312
grained image, (Jaderberg et al., 2015) proposes the
Spatial Transformer, which can apply multiple trans-
formations on the inputs. The transformation could
possibly make the transformed images to be attenti-
onal regions of the input images. However, for the
video-based case, as we observe that (Jaderberg et al.,
2015) suffers from the mentioned problem, we pro-
pose a supervised variant of (Jaderberg et al., 2015).
The supervising signals are computed from hard-
coded attentional regions obtained by a motion-heavy
strategy that is similar to (Singh et al., 2016; Cherian
and Gould, 2017). The work of (Chen et al., 2016) is
also a supervised variant of (Jaderberg et al., 2015).
However, our work is still very different from (Chen
et al., 2016), because: (1)Beside the categorical la-
bels, (Chen et al., 2016) requires another ground truth,
namely the facial landmarks, which is quite unique for
face detection. However, we only use categorical la-
bels as ground truth. Motion-heavy regions are used
for supervision, which apparently cannot be regarded
as ground truth. (2) (Chen et al., 2016) supervises the
spatial transformer via an FC layer. However, with re-
gressive guiding, we directly supervise by the inten-
ded initial transformation parameters. Our methods
is more direct and easier to theoretically explain as
there is no “black box” (i.e., the FC layer) between
the supervising target and signal. (3) In (Chen et al.,
2016), the supervision module works all the time. In
our work, after the supervision, the supervision mo-
dule is “turned off ”. Thus, in the latter stage, our
work is optimized only towards the target of better
recognition without being influenced by manual sig-
nals. (4) By different initialization, our approach is
able to obtain attentional information of multiple sca-
les, which provide complementary information.
Above-mentioned works are mainly about obtai-
ning the information of single frames. There are
some studies focusing on pooling schemes that aggre-
gate frame-level features into a video-level represen-
tation. Temporal correlation pooling (TCP) (Cherian
and Gould, 2017), for example, is a temporal pool-
ing scheme based on second-order pooling. Besides,
(Cherian et al., 2017b) also tries to analyze higher-
order statistics among frame-level features.
3 APPROACH
3.1 STNs in Attention Learning
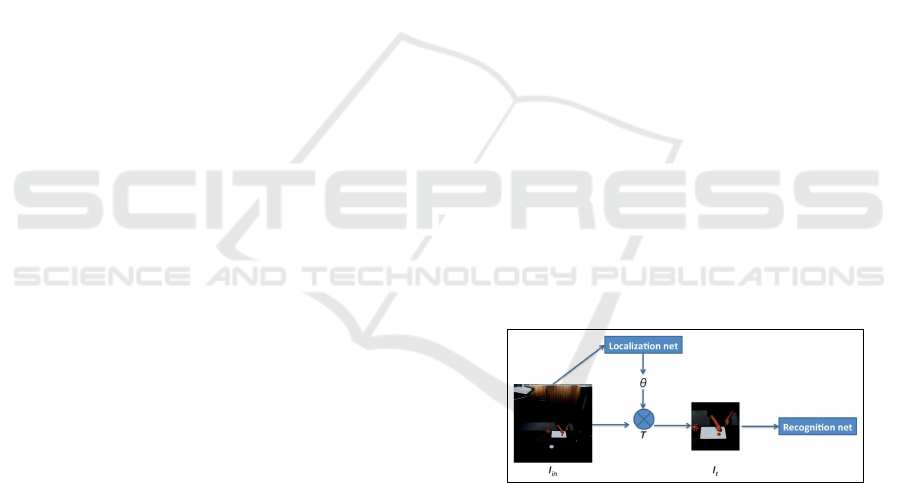
STNs are initially designed for image alignment. As
shown in Fig. 2, STNs can be roughly divided into
two parts: the localization network and the recogni-
tion network. Given an input image I
in
, the localiza-
tion network can learn a set of transformation para-
meters θ = f
loc
(I
in
), where f
loc
denotes the function
of the localization network. Thereafter a sampler T
obtains the transformed image I
t
= T (θ, I
in
), and I
t
will be the input of the recognition network. The
whole structure can be optimized together: thus, the
transformation applied on I
in
will make I
t
better re-
cognized by the recognition network. To obtain I
t
,
T utilizes a parameterized sampling grid. For exam-
ple, assume T (θ, I
in
) applies affine transformation on
I
in
. Thereafter θ =
θ
11
θ
12
θ
13
θ
21
θ
22
θ
23
is an affine trans-
formation matrix. Let G be a regular grid, and I
t
is
defined on it. (x
t
i
, y
t
i
) are the target coordinates of the
i
th
pixel of G. (x
s
i
, y
s
i
) are the sampling coordinates in
I
in
. The transformation is
x
s
i
y
s
i
=
θ
11
θ
12
θ
13
θ
21
θ
22
θ
23
x
t
i
y
t
i
1
(1)
In addition to affine, STNs also allow other trans-
formations, such as cropping, rotation and scaling. In
our work, we hope the spatial transformers to cap-
ture the attentional regions. However, it is hard to
make the localization network automatically “know”
our intention. The networks can hardly automatically
perform the cropping of right scale, rather than other
transformations, when only categorical information is
provided. Furthermore, in many cases, the images
obtained from localization networks are severely dis-
torted. We refer this problem as “Distortion Effect”.
Figure 2: Illustration of STNs. The localization net can
learn a set of transformation parameters θ from input image
I
in
. With θ, sampler T transfers I
in
to I
t
, which will be the
input of the recognition network.
Distortion Effect: As shown in Fig. 3, the pur-
pose of using STNs is to learn the attentional regi-
ons from input frames. However, what we actually
obtain from STNs are distorted images that cannot be
well recognized by the recognition network. This is
because initial parameters of spatial transformer mo-
dules are random. Therefore, at the beginning, the
transformation applied on video frames is meaning-
less. In many cases, especially when we want more
detailed information, however STNs are trained, they
still obtain only distorted images. It is because in such
Supervised Spatial Transformer Networks for Attention Learning in Fine-grained Action Recognition
313

cases, STNs can hardly be optimized with only classi-
fication loss propagated from a recognition network.
Figure 3: Illustration of “Distortion Effect”. We hope to
obtain attentional regions, but only obtained distorted ima-
ges.
3.2 SSTNs
To solve the problem of “Distortion Effect” as well
as capture multi-level attentional regions, we propose
SSTNs, which initialize the localization network with
hard-coded attentional region by regressive guiding.
Then, regressive guiding is turned off and localization
network is jointly trained with recognition network.
Hard-coded Attentional Region Generation: We
utilize optical flows to locate hard-coded attentional
region. p represents a certain frame, whose size is
w × h and w is the long side. O = {o
1
, o
2
, ..., o
l
} are
l optical flows around p. We first compute the mo-
tion value map M by (2). In (2), α and β denote the
spatial location of pixels. We then use a window of
size v × v(w > h > v) to traverse M. Thereafter, we
use the window which has the most motion value to
bound the hard-coded attentional region.
M
α,β
=
1
l
l
∑
i=1
o
2
i,α,β
(2)
Regressive Guiding: As shown in Fig. 4, we initia-
lize the localization network by regression. Let I be
the input image. θ
1
= f
loc
(I), is the transformation
parameters directly computed from the input image
by a localization network. θ
2
is also a set of transfor-
mation parameters and T (θ
2
, I) is equal to the hard-
coded attentional region R
h
. θ
2
can be computed be-
forehand according to the knowledge in Section 3.1
(θ
2
is actually a rotation matrix, and both R
h
and I are
already known). During regressive training, θ
2
is the
regressive objective. The network is trained by redu-
cing the l
1
loss incurred by θ
1
against θ
2
. After the
training, given input images, the localization network
will output approximate R
h
.
We then fuse the initialized localization network
with the recognition network and train them toget-
her (joint training). During the joint training, the net-
works will gradually locate from R
h
to deep-learned
attentional region R
d
, which is more discriminative.
Figure 4: Illustration of the SSTNs. The parts in the black
frame box are the parts that implement regressive guiding.
Inside the black frame box, except the shaded parts, the rest
parts are actually existing parts of STNs. During regres-
sive guiding, the parts outside of the black frame box are
turned off (truncated). After regressive guiding, for further
adjusting the attentional regions, the shaded parts are tur-
ned off and all the other parts are turned on (linked up). In
this figure, θ
1
is the transformation parameters outputted by
localization network. θ
2
is the transformation parameters,
with which the sampler T will output the same region as
hard-coded attentional regions. During regressive guiding,
we use θ
2
as regression target and train the parts in the black
frame box by minimizing the l
1
loss between θ
1
and θ
2
.
(a) (b) (c) (d)
Figure 5: When distinguishing between “cut outside” (a)
and “cut slices” (b), it is obvious that discriminative infor-
mation is mainly contained in detailed region. However, in
some other cases, such as distinguishing between “take out
from drawer” (c) and “take out from fridge” (d), more ge-
neral information, such as the position of human (whether
the person is closer to the fridge or drawer), is also impor-
tant
3.3 Multi-stream SSTNs
When smaller attentional regions can provide more
detailed information, sometimes more general infor-
mation is also crucial (Fig. 5). To provide all-round
information, we apply three levels of attentional regi-
ons, namely detail level, middle level and general le-
vel. Multi-stream networks are developed to learn two
types of information (RGB frames and optical flows)
for each of the three levels of attentional regions (ge-
neral, middle and detail). Thus our whole framework
has totally six streams of SSTNs (Fig. 6).
To obtain different levels of attentional regions,
we first resize the original frame I
ori
(w
ori
× h
ori
) to
I
rs
, whose size is w
rs
× h
rs
(w
ori
, w
rs
are the long si-
des). We then randomly crop a h
rs
×h
rs
part I
crop
from
I
rs
. Then we need to obtain the deep-learned atten-
tional region R
d
with the localization network f
loc
()
and the cropped frame I
crop
. In this work, localization
network and recognition network require the inputs
of the same and definite size (let it be h
in
× h
in
. e.g.,
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
314

224 × 224). Thus, we first downscale (e.g., spatial
pooling or image resizing) I
crop
to I
0
crop
whose size is
h
in
× h
in
. Then we can compute the transformation
parameter θ = f
loc
(I
0
crop
). Then R
d
can be obtained
by R
d
= T (θ, I
crop
). We set up T to output R
d
to be
the size of h
in
× h
in
. θ is initialized by regressive gui-
ding beforehand to make T to capture a region of a
certain scale from I
crop
. It is obvious that the scale is
determined by the sizes of I
crop
and R
d
. Since the size
of R
d
is definite, the scale is actually determined by
h
rs
. Thus, if we set w
rs
and h
rs
to be larger, R
d
will be
more detailed; otherwise, it will be more general.
Therefore, we can initialize multi-level localiza-
tion networks with multi-size I
crop
and the correspon-
ding R
h
. Then the attentional regions can be fine-
tuned according to the classification loss.
3.4 Temporal Correlation Pooling
By far, what we introduced is about exploring infor-
mation from single frames (or a sequence of optical
flows around a single frame). In this section, we intro-
duce how we aggregate the information from different
frames of a video clip.
For this, we mainly apply TCP (Cherian and
Gould, 2017), which is a second-order pooling
scheme for pooling a temporal sequence of features.
Let V = {v
1
, v
2
, ..., v
i
, ..., v
n
} be feature vectors com-
puted from frames P = {p
1
, p
2
, ..., p
i
, ... p
n
} of a vi-
deo clip C. v
n
= {κ
1n
, κ
2n
, ..., κ
ji
, ..., κ
mn
} is a m-
dimensional feature vector of the n
th
frame in C. Tra-
jectory is defined as t
j
= {κ
j1
, κ
j2
, ..., κ
ji
, ..., κ
jn
}, j ∈
{1, 2, ..., m}. TCP summarizes the similarities bet-
ween each pair of trajectories in a symmetric positive
definite matrix S ∈ R
m×m
. For example, the value of
the i
th
row and j
th
column in S could be given by :
S
i, j
= E
dis
(t
i
,t
j
) (3)
where E
dis
denotes Euclidean distance. In our work,
after training the networks, we extract frame-level
deep features and use TCP to pool those features to
obtain video-level features, as shown in Fig. 6.
Figure 6: Structure of the proposed approach. Totally six
streams learns multi-level spatial-temporal features, which
is then pooled and fused into video-level representation.
4 EVALUATION
The evaluation can be mainly divided into two parts.
The first part is to confirm that SSTNs are ef-
fective for capturing deep-learned attentional regions
(Section 4.2). We evaluate multi-level SSTNs and
STNs with localization networks of different parame-
ter sizes. By single-frame validation, we confirm that
SSTNs outperform STNs in every scale. The second
part is to confirm the improvement brought by propo-
sed approach over traditional hard-coded approaches
by all-frame validation (Section 4.3).
4.1 Dataset and Implementation Details
Dataset: To evaluate our approach, we use the MPII
Cooking Activities Dataset (Rohrbach et al., 2012),
which is a dataset of cooking activities. The dataset
contains 5609 clips, 3748 of which are labeled as one
the of 64 distinct cooking activities, and the remaining
1861 are labeled as background activity.
Networks: We utilize the VGG-16 model (Simonyan
and Zisserman, 2014b) for all the recognition net-
works . For localization networks, we utilize VGG-
F, VGG-M (Chatfield et al., 2014) and VGG-16. We
set the batch size as 128 with sub-batch strategy. We
set the dropout ratio as 0.85 for the spatial recognition
networks and 0.5 for the temporal ones. The dropout
ratio of all localization networks are set as 0.5. We
first train the localization network by regressive gui-
ding and pre-train the recognition networks by rand-
omly cropping on I
rs
. At this stage, we set the lear-
ning rate as 10
−3
for localization networks and 10
−4
for recognition networks. We then fuse localization
and recognition networks for joint training. At this
stage, we set the learning rate as 10
−6
for localization
networks and 10
−5
for recognition networks. When
training CNNs directly on hard-coded attentional re-
gions, the learning rate is set as 10
−4
at first and then
10
−5
when training status saturates.
Attentional Region: The original size of frames in
the dataset is 1624 × 1224. Table 1 shows the sizes of
I
rs
, I
crop
and I
0
crop
/ R
h
/ R
d
for different levels. Regar-
ding the downscaling strategy for obtaining I
0
crop
from
I
crop
, we utilize resizing for general level. For middle
and detail level, we respectively add 2× and 4× max
pooling layers before the localization networks.
Temporal Pooling: After completing the training of
networks, we extract FC6 features for every frame in
video clips. We then use TCP to pool the frame-level
features to a video-level representation. However, dif-
fering from (Cherian and Gould, 2017), we use PCA
to reduce the dimension of FC6 features (4096-d to
256-d), rather than block-diagonal kernelized correla-
Supervised Spatial Transformer Networks for Attention Learning in Fine-grained Action Recognition
315
tion pooling (BKCP).
Multi-stream Fusion: As mentioned before, our fi-
nal structure consists of 6 streams. Each stream is
trained separately. Therefore, we obtain six types of
video-level representations by six streams. For each
of the three levels (detail, middle and general), we
concatenate spatial and temporal video-level repre-
sentations and use them to train a linear SVM. Pre-
diction scores from the three SVMs are applied with
average fusion to be the final prediction scores.
Table 1: Size configuration for different levels
Level I
rs
I
crop
I
0
crop
/ R
h
/ R
d
Detail 1189 × 896 896 × 896 224 × 224
Middle 594 × 448 448 × 448 224 × 224
General 340 × 256 256 × 256 224 × 224
4.2 Comparison between SSTNs/ STNs
In this section, we evaluate the classification perfor-
mance of SSTNs by comparing SSTNs with STNs re-
spectively in detail, middle and general levels. For
each level, we respectively utilize VGG-F, VGG-M
and VGG-16 to act as the localization networks of
SSTNs and STNs. For controlling variables, all the
recognition networks are VGG-16. The three dif-
ferent kinds of localization networks are similar in
structures, but different in the depth of layers, the
pixel stride of certain convolutional layers and con-
sequently the size of total parameters. The parameter
sizes of VGG-F, VGG-M and VGG-16 are respecti-
vely about 227M, 384M and 515M.
The main objective of this section is to evaluate
whether and to what extend SSTNs can outperform
STNs in different cases. Then, we can decide how we
can propose more effective deep-learned attentional
regions based on the evaluation results. For speed-
precision trade-off, in this section, we evaluate the
one-vs-all accuracies of different SSTNs and STNs
by randomly selecting a single frame per video, rat-
her than aggregating the information learned from all
the frames of each video. The evaluation results are
shown in Table 2. We also show the regions captured
by different STNs and SSTNs in Fig. 8.
It can be observed that:
Detail Level. The improvements brought by SSTNs
in this level are most noticeable. Whereas the accu-
racy of STNs are very low, suggesting STNs can
hardly capture the information of this level. In con-
trast, for SSTNs, when utilizing the localization net-
works of same size, the accuracies in detail level are
the highest. Moreover, for STNs, the larger the locali-
zation network is, the harder it is to optimize. Conver-
sely, the SSTNs with more parameters in localization
networks have better results.
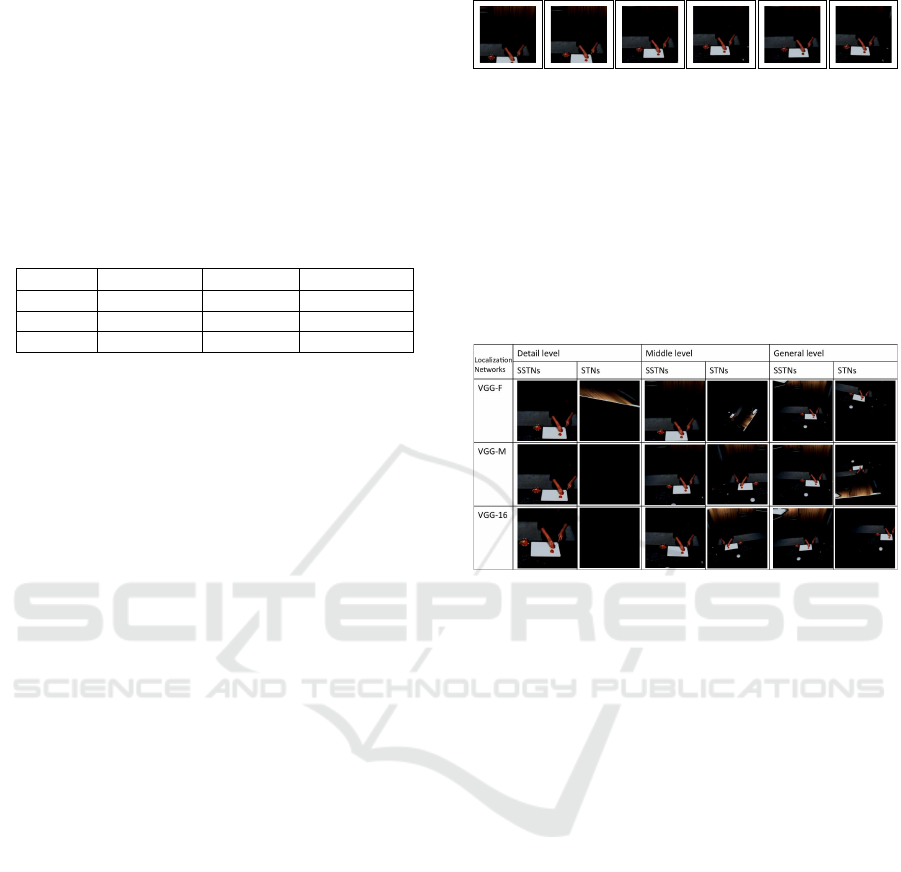
(a) (b) (c) (d) (e) (f)
Figure 7: (a-f) show the middle-level attentional regions
captured by SSTNs during the joint training. (a) is the at-
tentional region captured by the SSTN that is just initialized
by regressive guiding. Thus, (a) can be regarded to be equal
to the hard-coded attentional region. (f) is the attentional
region captured by the SSTN when the joint training is fi-
nished. (b-e) are attentional regions captured by SSTNs in
different stages between (a) and (f). It can be seen that from
(a) to (f), SSTNs gradually focus on more informative regi-
ons with the action-happening region coming to the center
of the scene (from person-centric to action-centric).
Figure 8: Illustration of the deep-learned attentional regi-
ons captured by different SSTNs and STNs after the trai-
ning. Overall, all STNs suffer from Distortion Effect to
some extend. Especially in detail level, “Distortion Effect”
is so severe that STNs can get almost none detail-level in-
formation. On the contrary, SSTNs can capture attentio-
nal regions as intended without being affected by “Distor-
tion Effect”. Among different levels, the detail-level SSTN
mainly captures the objects concerned with the action, such
as hands and knife. The general-level SSTN preserves much
background information and the middle-level SSTN captu-
res the information between the detail and general SSTNs.
Moreover, for SSTNs, in the attentional regions captured by
the larger localization networks, the action-happening place
is more central in the captured scenes.
Middle Level. SSTNs outperform STNs. For
SSTNs, larger localization networks bring better re-
sults. Whereas for STNs, the one using VGG-16 per-
forms worst.
General Level. SSTNs outperform STNs. For
SSTNs, the localization networks with more parame-
ters get better results. However, for STNs, the ones
that use VGG-16 and VGG-F as localization networks
have similar performance while the one using VGG-
M performs much worse than them.
To sum up, SSTNs improve the performance over
STNs. Among the three levels, detail-level infor-
mation is most effective but only can be explored
by SSTNs. Larger localization networks should be
more capable but only SSTNs can release the poten-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
316
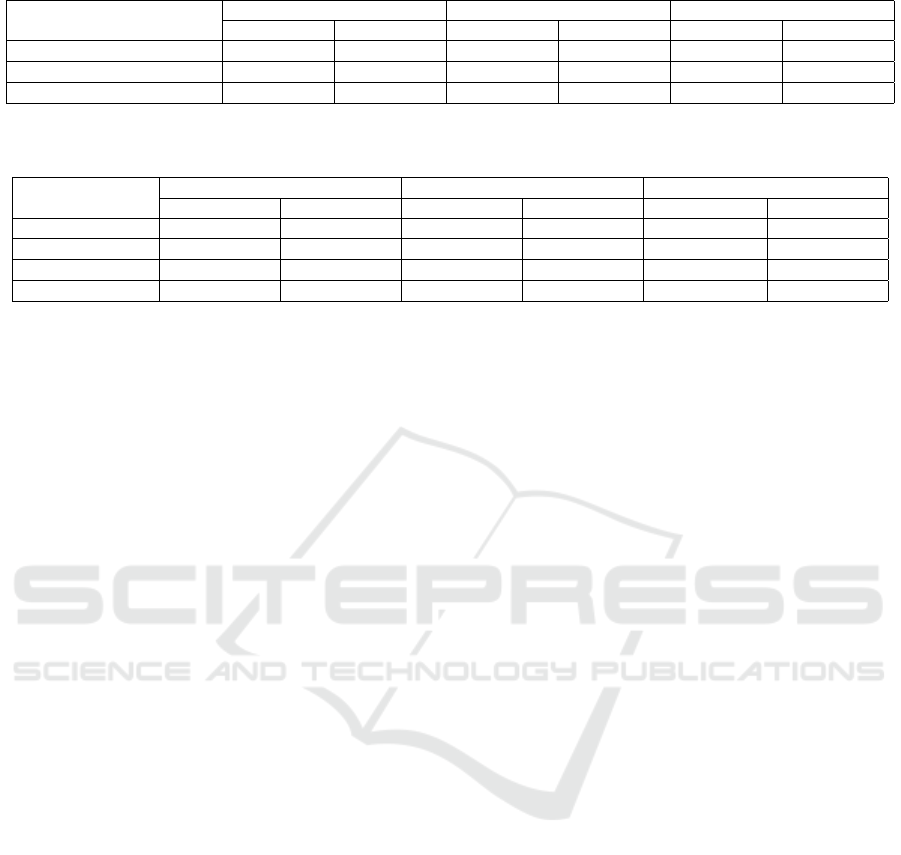
Table 2: Comparison on single-frame classification performance (one-vs-all accuracy) of SSTNs and STNs
Localization networks
Detail level Middle level General level
STNs SSTNs STNs SSTNs STNs SSTNs
VGG-F 10.67% 29.91% 25.53% 28.68% 29.02% 29.41%
VGG-M 7.97% 31.09% 28.68% 29.91% 23.95% 29.46%
VGG-16 6.39% 32.32% 28.38% 30.64% 29.1% 30.1%
Table 3: All-frame classification performance (mAP) comparison between hard-coded (R
h
) and deep-learned (R
d
) attentional
regions. “S + T” denotes concatenating spatial and temporal video-level representations.
Spatial Temporal S + T
R
d
R
h
R
d
R
h
R
d
R
h
General 41.73% 38.98% 54.78% 54.18% 56.51% 56.68%
Middle 50.92% 50.53% 56.23% 52.87% 61.02% 58.96%
Detail 52.75% 51.4% 59.07% 49.18% 62.01% 58.27%
Late fusion 56.08% 55.06% 60.83% 57.38% 63.16% 60.09%
tial. Thus, in the next section, we utilize SSTNs with
VGG-16 as localization network to capture multi-
level deep-learned attentional regions.
4.3 Comparison between Hard-coded/
Deep-learned Attentional Regions
Table 3 shows the mAP results of recognition net-
works trained on hard-coded (R
h
) and deep-learned
(R
d
) attentional regions. It is obvious that R
d
per-
forms better than R
h
in all aspects. In the detail level
of temporal stream, performance is improved mostly
from R
h
to R
d
. Also, it can be inferred that detail-level
R
d
performs better than middle-level R
d
, and middle-
level R
d
performs better than general-level R
d
.
Moreover, the three levels of features are comple-
mentary to each other. With late fusion, the perfor-
mance can be further improved. Fig. 7 uses middle-
level attentional regions as an example, showing the
attentional regions captured by SSTNs during the dif-
ferent stages of joint training. The figure illustrates in
the manner in which SSTNs gradually move the focus
from person-centric to action-centric.
Regarding the state-of-art works (Cherian et al.,
2017a; Cherian and Gould, 2018) on this dataset,
rather than learning more informative features from
each frame, they focus on the pooling schemes for
aggregating information from different frames, which
is not the point we focus on at all. Besides, those
state-of-art performances are achieved by combining
with shallow features. However, in this paper, for
comparing the performance between hard-coded and
deep-learned attentional regions, our evaluation sim-
ply uses a simple version of TCP and does not inte-
grate with shallow features. Therefore, in fact, it is
quite not meaningful to compare our work with the
state-of-art works. However, since those state-of-art
works are about temporal pooling, they are actually
complementary with our work. Since our work intro-
duces an effective approach for capturing more dis-
criminative deep-learned attentional regions, we sup-
pose the recognition results may be further improved
by aggregating the frame-level features obtained from
our approaches by those pooling methods.
5 CONCLUSIONS
We introduce a new extension model of STNs, the
SSTNs. With the mechanism of regressive guiding,
SSTNs are able to let the spatial transformers to un-
derstand their “mission”. Regressive guiding super-
vises spatial transformers to capture multi-level atten-
tional regions according to the hard-coded attentional
regions at first. Then regressive guiding is turned off
and the model is able to adjust to capture more ef-
fective regions. Also, with regressive guiding, spatial
transformers do not suffer from “Distortion Effect”.
It is clear that, the spatial transformers supervised by
the mechanism perform the operation of region cap-
turing while the spatial transformers without the me-
chanism tend to get distorted images. Furthermore,
the SSTNs with larger localization networks capture
more effective attentional regions. The deep-learned
attentional regions help SSTNs to gain better recog-
nition results than the CNNs trained on hard-coded
attentional regions. Moreover, the streams of multi-
stream SSTNs are complementary to each other. The
fusion of them brings better results.
ACKNOWLEDGEMENT
This work is supported by the JSPS Grant-in-Aid for
Young Scientists (B) (No.17K12714), the JST Center
of Innovation Program and PhD Program Toryumon.
Supervised Spatial Transformer Networks for Attention Learning in Fine-grained Action Recognition
317

REFERENCES
Ba, J., Salakhutdinov, R. R., Grosse, R. B., and Frey, B. J.
(2015). Learning wake-sleep recurrent attention mo-
dels. In Advances in Neural Information Processing
Systems, pages 2593–2601.
Chatfield, K., Simonyan, K., Vedaldi, A., and Zisserman,
A. (2014). Return of the devil in the details: Delving
deep into convolutional nets. In British Machine Vi-
sion Conference.
Chen, D., Hua, G., and Wen, F. (2016). Supervised trans-
former network for efficient face detection. In Euro-
pean Conference on Computer Vision, pages 122–138.
Springer.
Cherian, A., Fernando, B., Harandi, M., and Gould, S.
(2017a). Generalized rank pooling for activity recog-
nition. arXiv preprint arXiv, 170402112.
Cherian, A. and Gould, S. (2017). Second-order tempo-
ral pooling for action recognition. arXiv preprint
arXiv:1704.06925.
Cherian, A. and Gould, S. (2018). Second-order temporal
pooling for action recognition. International Journal
of Computer Vision.
Cherian, A., Koniusz, P., and Gould, S. (2017b). Higher-
order pooling of CNN features via kernel linearization
for action recognition. CoRR, abs/1701.05432.
Ch
´
eron, G., Laptev, I., and Schmid, C. (2015). P-cnn: Pose-
based cnn features for action recognition. In Procee-
dings of the IEEE international conference on compu-
ter vision, pages 3218–3226.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appea-
rance. In European conference on computer vision,
pages 428–441. Springer.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2016). Con-
volutional two-stream network fusion for video action
recognition. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1933–1941.
Jaderberg, M., Simonyan, K., Zisserman, A., et al. (2015).
Spatial transformer networks. In Advances in Neural
Information Processing Systems, pages 2017–2025.
Le, Q. V., Zou, W. Y., Yeung, S. Y., and Ng, A. Y. (2011).
Learning hierarchical invariant spatio-temporal featu-
res for action recognition with independent subspace
analysis. In Computer Vision and Pattern Recogni-
tion (CVPR), 2011 IEEE Conference on, pages 3361–
3368. IEEE.
Li, Z., Gavrilyuk, K., Gavves, E., Jain, M., and Snoek, C. G.
(2018). Videolstm convolves, attends and flows for
action recognition. Computer Vision and Image Un-
derstanding, 166:41–50.
Rohrbach, M., Amin, S., Andriluka, M., and Schiele, B.
(2012). A database for fine grained activity detection
of cooking activities. In Computer Vision and Pattern
Recognition (CVPR), 2012 IEEE Conference on, pa-
ges 1194–1201. IEEE.
Sharma, S., Kiros, R., and Salakhutdinov, R. (2015). Action
recognition using visual attention. arXiv preprint
arXiv:1511.04119.
Simonyan, K. and Zisserman, A. (2014a). Two-stream
convolutional networks for action recognition in vi-
deos. In Advances in neural information processing
systems, pages 568–576.
Simonyan, K. and Zisserman, A. (2014b). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Singh, B., Marks, T. K., Jones, M., Tuzel, O., and Shao, M.
(2016). A multi-stream bi-directional recurrent neural
network for fine-grained action detection. In Procee-
dings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 1961–1970.
Soomro, K., Zamir, A. R., and Shah, M. (2012). Ucf101:
A dataset of 101 human actions classes from videos in
the wild. arXiv preprint arXiv:1212.0402.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C.-L. (2011).
Action recognition by dense trajectories. In Computer
Vision and Pattern Recognition (CVPR), 2011 IEEE
Conference on, pages 3169–3176. IEEE.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C.-L. (2013).
Dense trajectories and motion boundary descriptors
for action recognition. International journal of com-
puter vision, 103(1):60–79.
Wang, L., Qiao, Y., and Tang, X. (2015). Action recog-
nition with trajectory-pooled deep-convolutional des-
criptors. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
4305–4314.
Wang, Y., Song, J., Wang, L., Van Gool, L., and Hilliges,
O. (2016). Two-stream sr-cnns for action recognition
in videos. In BMVC.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
318
