
Efficient GPU Implementation of Lucas-Kanade through OpenACC
Olfa Haggui
1,2
, Claude Tadonki
1
, Fatma Sayadi
3
and Bouraoui Ouni
2
1
Centre de Recherche en Informatique (CRI), Mines ParisTech - PSL Research University,
60 boulevard Saint-Michel, 75006 Paris, France
2
Networked Objects Control and Communications Systems (NOCCS),
Sousse National School of Engineering, BP 264 Sousse Erriadh 4023, Tunisia
3
Electronics and Microelectronics Laboratory,Faculty of Sciences,
Keywords:
Optical Flow, Lucas-Kanade, Multicore, Manycore, GPU, OpenACC.
Abstract:
Optical flow estimation stands as an essential component for motion detection and object tracking procedures.
It is an image processing algorithm, which is typically composed of a series of convolution masks (approxi-
mation of the derivatives) followed by 2 × 2 linear systems for the optical flow vectors. Since we are dealing
with a stencil computation for each stage of the algorithm, the overhead from memory accesses is expected to
be significant and to yield a genuine scalability bottleneck, especially with the complexity of GPU memory
configuration. In this paper, we investigate a GPU deployment of an optimized CPU implementation via Ope-
nACC, a directive-based parallel programming model and framework that ease the process of porting codes
to a wide-variety of heterogeneous HPC hardware platforms and architectures. We explore each of the major
technical features and strive to get the best performance impact. Experimental results on a Quadro P5000
are provided together with the corresponding technical discussions, taking the performance of the multicore
version on a INTEL Broadwell EP as the baseline.
1 INTRODUCTION
Motion detection is an important topic in compu-
ter vision because of its central consideration in va-
rious real world applications. Related algorithms
are used in objects tracking(S.A. Mahmoudi, 2014;
V. Tarasenko, 2016), video surveillance(V. Tarasenko,
2016; Kalirajan and Sudha, 2015), basic image pro-
cessing(E. Antonakos, 2015; S. N.Tamgade, 2009),
cars technology(R. Allaoui, 2017), robotics(C. Cili-
berto, 2011), to name a few. Motion estimation con-
sists in extracting a motion vector from a sequence of
consecutive images by assuming that the intensity is
preserved during the displacement. Currently, among
the methods available in the literature, the optical flow
algorithm is one of the most commonly used appro-
ach for motion evaluation, which is a basic block of
a vision process designed for a specific application.
There are different methods for optical flow estima-
tion, with a pioneer work by J.J. Gibson (Gibson,
1950) in 1950.
The computing of the optical flow is a subject
that has been widely studied for several decades,
with successful implementations in many interesting
applications. Besides pure optical flow investigati-
ons, a combination with other techniques has been
considered too, like the work of Horn and Schunck
(K.P. Horn, 1981), that has led to multiple derived
methods and improved optical flow algorithms. It in-
troduces a global constraint of smoothness over the
whole image to minimize distortions in the flow. Ho-
wever, in case of small motions, this method is im-
peded by its weak robustness. The so-called Lucas-
Kanade algorithm by Lucas and Kanade (B.D. Lucas,
1981) is a local approach providing more accurate re-
sults for optical flow estimation. The algorithm is less
sensitive to image noises, yields good quality results
with moderate computational cost, and is capable of
tracking even tiny motions. Considering all these fac-
tors and in comparison with other optical flow algo-
rithms, Lucas-Kanade method is the most considered
one for estimating the optical flow for all (or selected)
pixels, assuming that the flow is constant in a local
neighborhood. The results of the algorithm is more
reliable if corner pixels (O. Haggui, 2018) are used.
Our work stands as another parallelization of
Lucas-Kanade algorithm in the context of multicore
and manycore processor. Beside our OpenACC im-
768
Haggui, O., Tadonki, C., Sayadi, F. and Ouni, B.
Efficient GPU Implementation of Lucas-Kanade through OpenACC.
DOI: 10.5220/0007272107680775
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 768-775
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

plementation, which is not a novelty by itself, we
study the impact of OpenACC directives considera-
tions on the scalability and memory access for GPU
and CPU processors. The remainder of paper is or-
ganized as follows. Section 2 provides a basic back-
ground of the optical flow method and describes the
Lucas-kanade algorithm. we start with a baseline
multicore implementation in section 3. Section 4
and 5 gives an overview of GPU architecture and
OpenACC programming paradigms respectively. In
Section 6, we describe our OpenACC parallelization
and we provide a commented report of our experi-
mental results . Section 7 concludes the paper and
outline some perspectives.
2 RELATED WORK
Beside the quality of the estimation, the execution
time is also important (A. Garcia-Dopico, 2014;
S. Baker, 2004), especially with the consideration
of the real-time constraint. Indeed, since the algo-
rithm is likely to be applied on the consecutive fra-
mes of a live video, it should as fast as possible.
Implementation of the Lucas-Kanade algorithm on
the graphics processor Unit (GPU), in the GPGPU
standpoint, is seriously considered. In (J.Marzat,
2009), Marzat, Dumortier and Ducroct propose a pa-
rallel implementation on a GPU to compute a dense
and accurate velocity field using NVIDA Gt200 card,
which achieved 15 velocity field estimations per se-
cond on 640x480 images. Another relevant contri-
bution is presented in (S.A. Mahmoudi, 2014), in
which the authors implemented the optical flow mo-
tion tracking using Lucas-kanade combined with Har-
ris corner detector (only corner pixels are conside-
red) on a Full HD video using multiple GPUs. A
thorough implementation study is provided by Plyer,
Guy and Champagnat in (A. Plyer, 2016) denoted
by eFLOKI. It is a robust, accurate and high perfor-
mance method even on large format images. Duven-
hage, Delport and Jason(B. Duvenhage, 2010) also
investigated a GPU implementation using the Open
Graphics Library (OpenGL) and the Graphics Library
Shading Language (GLSL), with a performance simi-
lar than a comparative CUDA implementation. Other
authors have addressed the parallelization of optical
flow computation on FPGA (A. Garcia-Dopico, 2014;
R. Allaoui, 2017). They conclude that both have si-
milar performance, although their FPGA implemen-
tation took much longer to develop. An implementa-
tion on the CELL processor (C66xDSP) is provided
and discussed by Zhang and Cao (F. Zhang, 2014).
Regarding the multicore parallelization of the al-
gorithm, the work by (Kruglov, 2016) for instance
describes an updated method in order to speed up
the objects movement between frames in a video se-
quence using OpenMP. Another multi-core paralleli-
zation is proposed in (N. Monz, 2012). Pal, Biemann
and Baumgartner (I. Pal, 2014) discuss how the velo-
city of vehicles can be estimated using optical flow
implementation parallelized with OpenMP. Moreo-
ver, another hybrid model mitigate the bottleneck of
motion estimation algorithms with a small percentage
of source code modification. In (N. Martin, 2015),
Nelson and Jorge proposed the first implementation
of optical flow of Lucas-kanade algorithm based on
directives of OpenACC programming paradigms on
GPU. Carlos and Guillerom (C. Garcia, 2015) evalu-
ated also the directives of OpenACC with the GPU
performance. In this context our work evaluate also a
new OpenACC implementation but which processes
and analyzes the bottlenecks of the accesses memory.
3 LUCAS-KANADE ALGORITHM
3.1 Optical Flow
The optical flow is a computer vision topic, where the
main kernel is to calculate the apparent motion of fe-
atures across two consecutive frames of a given vi-
deo, thus estimating a global parametric transforma-
tion and local deformations. It is based mainly on lo-
cal spatio-temporal convolutions that are applied con-
secutively. The optical flow has lots of uses, and it
is an important clue for motion estimation, tracking,
surveillance, and recognition applications. Different
methods have been proposed for optical flow estima-
tion (B.D. Lucas, 1981; K.P. Horn, 1981; Gibson,
1950; Adelson and Bergen, 1985; Fleet and Jepson,
1995; Kories and Zimmerman, 1986), and they can be
grouped into block-based methods, spatio-temporal
differential methods, frequency-based methods and
correlation-based method. Each method has its ad-
vantages and its disadvantages, but the main draw-
back is the limited speed and the need of a large
memory space. Over the years, Horn and Schunck
algorithm(K.P. Horn, 1981) and Lucas-kanade algo-
rithm (B.D. Lucas, 1981) have became the most wi-
dely used techniques in computer vision. We have
focused on Lucas-kanade’s approach because is the
most adequate in terms of calculation complexity and
requires less computing resources. The main princi-
ple of the Lucas-Kanade optical flow estimation is to
assume the brightness constancy to find the velocity
vector between two successive frames (t and t+1) as
show in Figure 1, (a) and (b). The optical flow vectors
Efficient GPU Implementation of Lucas-Kanade through OpenACC
769
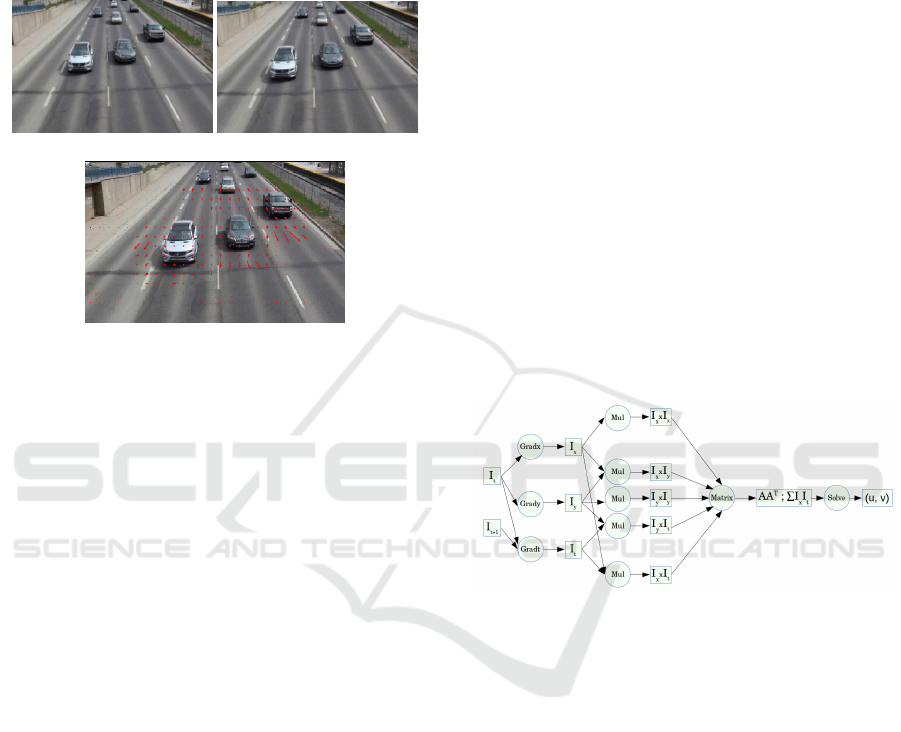
are drawn in Figure 1 (c). The accuracy of the estima-
tion of the displacement from the video sequence is
the main qualitative concern. Recalling that we have
to analyze a (live) video, a real-time processing ap-
pears very important, thus justifying all efforts to re-
ach a fast implementation.
(a) Frame t (b) Frame t+1
(c) Optical flow vectors
Figure 1: Optical Flow computation.
3.2 Description of Lucas-Kanade
Algorithm
The idea is to focus on representative pixels (cor-
ner pixels for instance), which are then checked for
motion across consecutive frames through intensity
variations, that are perceived as relative motion bet-
ween the scene and the camera. Consider a given 2D
image, a small motion is approximated by a transla-
tion. Thus, if the current frame is represented by its
intensity function I, then the intensity function H of
the next frame is such that
H(x, y) = I(x + u, y + v), (1)
where (u, v) is the displacement vector. For this pur-
pose, we have to solve for every pixel the following
so-called Lucas-Kanade equation:
∑
I
2
x
∑
I
x
I
y
∑
I
x
I
y
∑
I
2
y
u
v
= −
∑
I
x
I
t
∑
I
y
I
t
(2)
where I
x
, I
y
and I
t
are the derivatives of the intensity
along x, y and t direction respectively. The system re-
ally implements a least-square approach to find the
most likely displacement (u, v), since the original
system is overdetermined. The summations within
equation (2) are over the pixels inside the sampling
window. If the condition number of the normal ma-
trix is above a given threshold, then we compute the
solution of the system (using Kramer method for in-
stance) and thus obtain the components of the optical
flow vector for the corresponding pixel. An schema-
tic view of an algorithm for this computation can be
stated as follows:
1. compute the derivatives I
x
, I
y
, and I
t
2. compute the products I
2
x
, I
2
y
, I
x
I
t
, I
y
I
t
, and I
x
I
y
3. compute the matrix of the normal sub-matrices
and the corresponding right and sides
4. solve the linear systems for the optical flow vec-
tors
The derivatives (Step 1) are computed through their
Taylor approximations using the corresponding con-
volution kernels. Then follows their point-wise pro-
ducts in step 2. Step 3 computes for each pixel the
normal matrix and the right hand side of the linear sy-
stem as described in equation (2). In the ultimate step
where we solve the previous linear systems for each
pixel, the computation of the condition numbers is im-
plicit, they are indeed evaluated and compared with a
the chosen threshold in order to decide whether we
give up or we compute the solution of the system for
the optical flow vector. Figure 2 displays a schematic
view of the Lucas-Kanade computation chain.
Figure 2: Workflow of Lucas-Kanade algorithm.
4 BASELINE MULTICORE
IMPLEMENTATION
Our work start with a baseline sequential implementa-
tion where all operators involved in the Lucas-kanade
algorithm are separable. We are apply operators clus-
tering (O. Haggui, 2018) where the aims at merging
all the operators into a single one, in order to re-
duce the number of floating point operations(flops)
and reduce the intermediate storage. Furthermore,
we are study the effect of array contraction technique
(Y. Song, 2004), it is a program transformation which
reduces the array size while preserving the correct
output to perform the data reuse and cache locality.
A special case of array contraction called array sca-
larization has been used in order to improve register
utilization. At the same time, we use a shifting stra-
tegy which is the most well-known and fundamental
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
770
tool for matrix computations to resolve the memory
alignment issues.
Table 1: Evaluation of the Multicore optimization.
# cores 1 2 4 8 10
T(s) Acc Acc Acc Acc
2000
2
0.08 1.96 3.78 7.15 8.89
4000
2
0.34 1.95 3.86 7.53 9.28
6000
2
0.78 1.97 3.85 7.46 9.23
8000
2
1.38 1.95 3.88 7.58 9.35
12000
2
3.27 1.97 3.87 7.56 9.33
In order to evaluate our optimization strategies, we
consider an Intel Xeon E5-2669 v4(Broadwell-EP)
CPU having a total of 44 cores divided into 4 NUMA
(Non-Uniform Memory Access) nodes. We chose to
consider just one node NUMA (11 cores) with diffe-
rent size of images. Table 1 illustrates the effect of the
optimization strategies with multicore using OpenMP
programming language . we can notice that when
increasing the image resolution, OpenMP does not
provide a great improvement because it reaching the
maximum parallelism that can be supplied. However,
our speedups are good and can be improved by consi-
dering hardware accelerators like the GPU.
5 GPU ARCHITECTURE
Graphics Processor units (GPUs) stands as one of the
most effective manycore hardware accelerator in the
HPC landscape. GPUs are increasingly considered in
the implementation of numerous scientific and com-
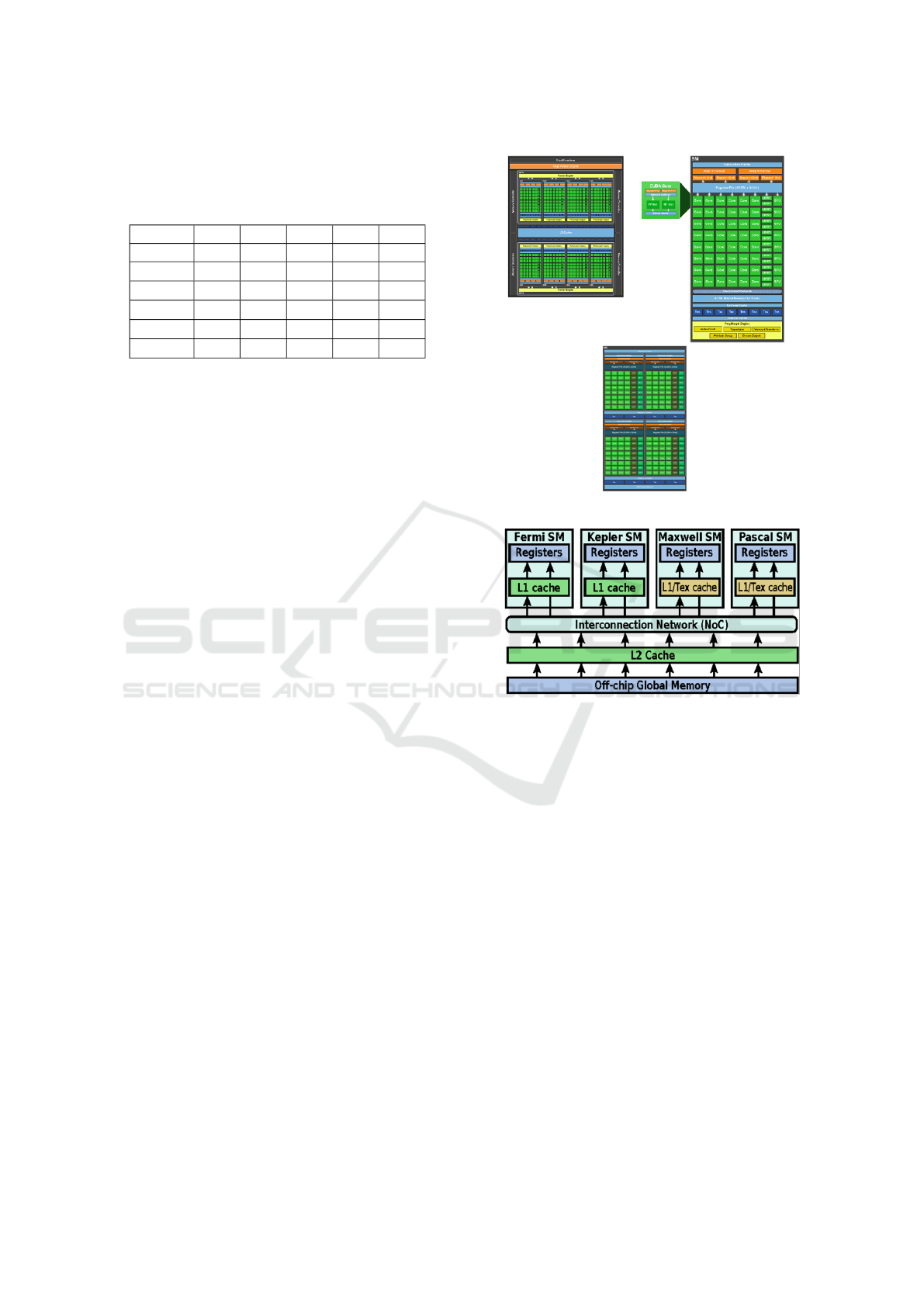
mercial applications. Modern GPUs consist of multi-
ple streaming multiprocessors (SMs or SMXs); each
SM consists of many scalar processors (SPs, also re-
ferred to as cores). Each GPU supports a concurrent
execution of hundreds to thousands of threads, and
each thread is executed by a scalar core as shown
in Figure 3. The elementary scheduling and execu-
tion unit is called a warp, which is composed of 32
threads. Warps of threads are grouped together into
a thread block, and blocks are grouped into a grid.
Both thread block and grid can be organized into a
one, two or three-dimensional topology (A. Brodt-
korb, 2013; T. Allen, 2016). The main advantage
of GPUs is their ability to perform significantly more
floating point operations(FLOPs) per unit of time than
an ordinary CPU, and they well implement data pa-
rallelism. Memory system is quite different between
CPUs and GPUs. A GPU has a more complex me-
mory hierarchy and the related information are not
usually provided with necessary details by the ven-
dors. Analyzing the memory access pattern and the
Figure 3: Processing units packaging within a GPU.
Figure 4: Overview of NVIDIA memory hierarchy.
associated costs on a GPU is an extremely challenging
task, which is a very important optimization step as
memory activity in this context is likely to be the main
performance bottleneck. The memory of a GPU has
different levels. The of-chip global memory resides in
RAM of the host CPU. It is accessible by all threads
in a grid, and this is the space where data exchan-
ges occur. There are also other types of data storage
units, namely registers and shared memories, which
cannot be accessed directly by the host, but by the
thread. However, shared memory subspace is alloca-
ted per thread block and is accessible by all of its thre-
ads. Because the shared memory is on-chip, latency is
much lower than for global memory. It is frequently
used as an optimization for applications where data
are reused once inside a thread block. The L1 cache
in the NVIDIA architecture is reserved only for local
memory accesses by default. Global loads/stores are
cached within the L2 cache only. Read-only Data Ca-
che was introduced in the latest NVIDIA architecture.
Texture memory and constant memory are allocated
in the off-chip memory associated to global memory,
Efficient GPU Implementation of Lucas-Kanade through OpenACC
771

but is accessed via dedicated buses. Both memories
have their own cache space and special features, and
are accessible by all threads. Figure 4 shows an over-
view of the memory hierarchy in NVIDIA GPUs.
Memory accesses are commonly known to yield
the performance bottleneck with GPUs, they have
been the major focus of code analyses for per-
formance improvements (N. K. Govindaraju, 2006;
T. Allen, 2016). The most offending overhead comes
from data transfers between the host and the device.
These transfers must pass through peripheral compo-
nents and the interconnect express bus. In addition,
with the different levels of the GPU memory system
and the large amount of data access, memory activity
is globally a critical point for performance concerns.
Accesses to global memory could get coalesced/un-
coalesced. Hence,it is possible to reduce the number
of global memory accesses as long as two conditions
are met: coalescence, where the neighboring threads
should access neighboring data and alignment, where
the addresses should be a multiple of the segment’s
size. In addition, the accesses to shared memory
could suffer from bank conflicts, accesses to texture
memory could come with spatial locality penalty and
accesses to constant memory could be broadcast. The
use of GPUs is more suitable with highly regular ap-
plications.
6 OVERVIEW OF OPENACC
PROGRAMMING MODEL
OpenACC(NVIDIA, 2015), (OpenACC, 2017) is an
accelerator programming standard emerged in 2011
as a model that uses high-level compiler directives
to expose parallelism in the code and generate pa-
rallel or accelerated versions for GPUs and multicore
CPUs. This paradigm relies on compilers to generate
efficient code and optimize for performance. In fact,
the programmers use compiler directives to indicate
which areas of code to accelerate, without any modi-
fication into the code itself. OpenACC uses parallel
or kernels constructs to define a compute region that
will be executed in parallel on the device, where the
loop construct is used to specify the distribution of
the iterations. In fact, the main program runs on the
CPU and the parallel (child) tasks are offloaded to the
GPUs. Moreover, the purpose of having both paral-
lel and kernels constructs is that the parallel construct
provides more control to the user while the kernels
one offers more control to the compiler. OpenACC
defines three levels of parallelism: gang, worker and
vector. A schematic view of a standard OpenACC di-
agram is displayed in figure 5, Where a gang is com-
posed of one or multiple workers. All workers within
a gang can share resources such as cache memory or
processor, and a worker can computes just one vec-
tor. A vector threads performs a single operation on
multiple data (SIMD) in a single step.
Figure 5: OpenACC working diagram.
In addition to the directives to express parallelism,
the OpenACC API also contains data directives. To
avoid unnecessary data exchanges between the local
memory of the GPU and the main memory located on
the host, the programmer can give some hint infor-
mation to the OpenACC compilers through appropri-
ate data directives. Generally, the OpenACC compi-
ler is responsible for the correctness and optimization
of data movement in both memories (GPU and CPU).
OpenACC provides different types of data transfer di-
rectives, clauses and runtime. Listing 1 shows an ex-
ample of a data directive to import the input from the
host to the device using the copyin clause, and vice-
versa with copyout.
#pragma a cc d a t a
c op yi n ( I [ 0 : s i z e N t ∗ s i z e M t ] ,
I t t [ 0 : s i z e N t t ∗ s i z e M t t ] )
c o p y o u t ( F [ 0 : s i z e N t ∗ s i ze Mt ] )
{
#pragma a cc p a r a l l e l l o o p
p r i v a t e ( j , aIx , a Iy , a I t )
gang num_gangs ( )
wo r ker num_ workers ( )
v e c t o r _ l e n g t h ( )
p r e s e n t ( I [ 0 : s i z e N t ∗ s i z e Mt ] ,
I t t [ 0 : s i z e N t t ∗ s i z e M t t ] )
c r e a t e (D [ 0 : ( 2 ∗ z +1)∗ s i z e N t ] )
f o r ( i = 0 ; i <2∗ z ; i ++)
{
# pragma a cc l oo p gang , v e c t o r
f o r ( j = 0 ; j < s i z e N t − 2; j ++)
{
a I x = I [w( ( i + 1 ) , ( j +1)+1)] −
I [w( ( i + 1 ) , ( j + 1 ) ) ] ;
a I y = I [w( ( i + 1 ) + 1 , ( j + 1 ))] −
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
772

I [w( ( i + 1 ) , ( j + 1 ) ) ] ;
a I t = I t t [w( ( i + 1 ) , ( j + 1 ))] −
I [w( ( i + 1 ) , ( j + 1 ) ) ] ;
}
}
Listing 1: Generic code with data related directives
7 PARALLELIZATION AND
EVALUATIONS
7.1 Hardware Configuration
To carry out the tests on the implementation develo-
ped in OpenACC, we have used a Quadro P5000 GPU
accelerator from NVIDIA (Pascal architecture). It in-
cludes 2560 CUDA cores with 16 GB GDDR5 me-
mory. The host is an Intel(R) Xeon(R) CPU E5-1620
v4 processors with 4 cores. We use PGI-pgcc, version
18.4.
7.2 Results of the Parallelization
In our experiments, we use different sizes of frame
and run our Lucas-Kanade implementation for the op-
tical flow vectors. We start with a baseline sequen-
tial implementation in C, enhanced with an OpenCV
function to load the image frames, then we have the
derived OpenACC version to parallelize the code wit-
hout considering any data directives. The first step
of the algorithm consists in loading the data from the
CPU to the GPU’s global memory. This step is yield a
significant overhead. Then, we define which part will
be accelerated with the device (kernel) using the basic
directives (#pragma acc kernel and/or #pragma
acc Parallel) as describe previously in listing 1.
Table 2: Evaluation of the GPU parallelization.
Image size CPU (s) GPU (s)
2000
2
0.09 0.018
4000
2
0.34 0.057
6000
2
0.78 0.13
8000
2
1.38 0.25
12000
2
3.27 0.64
We can see from table 2 that the OpenACC code
on the GPU significantly outperforms the parallel
CPU version. However, since the version at this stage
does not contain any memory optimization directive,
there is a potential room for improvement we at this
stage. To evaluate this potential, we used the NVIDIA
runtime profiler on our kernels to identify where me-
mory accesses look too high. We can use also Ope-
nACC flag -Minfo=all,clff to print all the infor-
mation about how to optimize the code.
7.3 Data Movement Optimization
In this subsection, we analyze the behavior of the ma-
jor data movement directives and clauses in order to
reduce the overhead of data exchanges and get ride of
intermediate data accesses whenever possible.
OpenACC allows an explicit control of data al-
location together with the corresponding transacti-
ons through appropriates clauses (copyin, copyout,
present, create). OpenACC provides the cache di-
rective #pragma acc cache, which tells the compi-
ler to seek the best cache performance for the indica-
ted memory region.
Although NVIDIA provides the concept of uni-
fied memory, which allows the GPU and the host
CPU to share the same global address space. This
is made technically possible using the NVLink in-
terconnect. The unified memory enables fast me-
mory accesses with large data sets. In fact, OpenACC
compiler provides the flag -ta=tesla:managed for
the unified memory consideration, and the flag
-ta=tesla:pinned for pinned memory. It is a me-
mory allocated using the cudaMallocHost function,
which prevents the memory from being swapped out
and thereby provides improved transfer speeds, con-
trary to the non-pinned memory obtained with a plain
malloc. In this context, the compiler relies on the
CUDA runtime to migrate data automatically through
Unified Memory, ensuring the coherence between
data references on the GPU and the corresponding
addresses on the main memory. The experimental re-
sults of our optimization investigation are summari-
zed in Table 3.
Table 3: Evaluation of our GPU optimization.
2000
2
4000
2
6000
2
8000
2
12000
2
(1) 0.018 0.057 0.130 0.250 0.640
(2) 0.007 0.024 0.056 0.091 0.174
(3) 0.007 0.025 0.057 0.095 0.181
(4) 0.006 0.023 0.055 0.088 0.174
(5) 0.006 0.020 0.052 0.074 0.147
(6) 0.005 0.018 0.047 0.074 0.145
• (1): Basic GPU parallelization
• (2): (1) + Data movement performance
• (3): (1) + Unified memory
• (4): (2) + cache directive
• (5): (2) + pinned
• (6): (4) + (5)
Efficient GPU Implementation of Lucas-Kanade through OpenACC
773

Figure 6 provides a global view of our incremen-
tal OpenACC optimization, while figure 7 displays a
comparison between the baseline CPU implementa-
tion and the fully optimized GPU one. In both cases,
the x-axis is for image sizes and the y-axis is for the
overall execution timings in seconds.
Figure 6: Incremental GPU optimization.
Figure 7: Basic CPU and fully optimized GPU.
Let summarize the steps of our work in this paper.
We consider the Lucas-Kanade algorithm for optical
flows computation. We start an optimized sequential
version that we parallelize with OpenMP and we get
decent speedups. Afterwards, looking at the abso-
lute performance, we investigate what can be obtain
with a GPU using OpenACC. Using the profile, we
identify the major bottleneck of the kernel: memory
transactions. We focus on efficient memory organiza-
tion and movement of data, performing an incremen-
tal memory optimization to get the best performance,
which, as expected, outperforms the parallel CPU im-
plementation.
8 CONCLUSION
A fast and accurate estimation of the optical flow
fields is a challenging task, both because of the stencil
nature of the computation and the memory complex-
ity of large-scale manycore accerelerator (GPU). In
this work, we investigated an OpenACC paralleliza-
tion of the Lucas-Kanade optical flow algorithm with
GPUs and obtain better performance that a parallel
version on a large multicore machine. OpenACC is
a promising alternative to consider for a fast deploy-
ment on the GPU. It makes possible to migrate stan-
dard CPU code in a straightforward way without ma-
king too many modifications, and obtain a decent per-
formance compared to other complex programming
model like CUDA and OpenCL.
ACKNOWLEDGMENT
We express our sincere gratitude to the Centre de Re-
cherche en Informatique (CRI) at Mines ParisTech for
all its supports.
REFERENCES
A. Brodtkorb, T. Hagen, M. S. (2013). Graphics processing
unit(gpu) programming strategies and trends in gpu
computing. In Journal of Parallel Distributed Com-
puting.
A. Garcia-Dopico, J. L. Pedraza, M. N. A. P. S. R. J. N.
(2014). Parallelization of the optical flow computa-
tion in sequences from moving cameras. In EURASIP
Journal on Image and Video Processing.
A. Plyer, G. Le Besnerais, F. C. (2016). Massively parallel
lucas kanade optical flow for real-time video proces-
sing applications. In J Real-Time Image Proc.
Adelson, E. H. and Bergen, J. R. (1985). Spatio temporal
energy models for the perception of motion. In Jour-
nal Opt. Soc. Am.
B. Duvenhage, JP. Delport, J. d. V. (2010). Implementa-
tion of the lucas-kanade image registration algorithm
on a gpu for 3d computational platform stabilisation.
In Proceedings of the 7th International Conference on
Computer Graphics, Virtual Reality, Visualisation and
Interaction.
B.D. Lucas, T. K. (1981). An image registration technique
with an application to stereo vision. In In Proceedings
of Image Understanding Workshop.
C. Ciliberto, U. Pattacini, L. N. F. N. G. M. (2011). Reex-
amining lucas-kanade method for real-time indepen-
dent motion detection: Application to the icub huma-
noid robotv. In International Conference on Intelli-
gent Robots and Systems.
C. Garcia, G. Botella, F. d. S. M. P.-M. (2015). Fast-coding
robust motion estimation model in a gpu. In Real-Time
Image and Video Processing.
E. Antonakos, J. Alabort, G. T. S. Z. (2015). Feature-based
lucas–kanade and active appearance models. In IEEE
Transactions on Image Processing.
F. Zhang, Y. Gao, J. D. B. (2014). Lucas-kanade optical
flow estimation on the ti c66x digital signal proces-
sor. In IEEE High Performance Extreme Computing
Conference (HPEC).
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
774

Fleet, D. J. and Jepson, A. D. (1995). Computation of com-
ponent image velocity from local phase information.
In IJCV.
Gibson, J. (1950). The perception of the visual world. In
Houghton Mifflin Boston.
I. Pal, R. Biemann, S. V. B. (2014). A comparison and
validation approach for traffic data, acquired by ai-
rborne radar and optical sensors using parallelized
lucas-kanade algorithm. In VDE VERLAG GMBH
Berlin Offenbach.
J.Marzat, Y.Dumortier, A. (2009). Real-time dense and
accurate parallel optical flow using cuda. In WSCG
Full papers proceedings, INRIA.
Kalirajan, K. and Sudha, M. (2015). Moving object de-
tection for video surveillance. In Hindawi Publishing
Corporatione Scientific World Journal.
Kories, R. and Zimmerman, G. (1986). A versatile met-
hod for the estimation of displacement vector fields
from image sequencesn. In IEEE Proc. of Workshop
on Motion-Representation and Analysis.
K.P. Horn, B. S. (1981). Determining optical flow artificial
intelligence. In In Proceedings of Image Understan-
ding Workshop.
Kruglov, A. N. (2016). Tracking of fast moving objects in
real time. In Pattern Recognition and Image Analysis.
N. K. Govindaraju, S. Larsen, J. D. M. (2006). A memory
model for scientific algorithms on graphics proces-
sors. In Proceedings of the ACM/IEEE conference on
Supercomputing.
N. Martin, J. Collado, G. B. C. G. M. P. (2015). Openacc-
based gpu acceleration of an optical flow algorithm.
In ACM Digital Library,SAC’15.
N. Monz, A. i. S. (2012). Parallel implementation of a ro-
bust optical flow technique. In Las Palmas de Gran
Canaria.
NVIDIA (2015). Openacc programming and best practices
guide. In openacc-standard.org.
O. Haggui, C. Tadonki, L. L. F. S. B. O. (2018). Harris
corner detection on a numa manycore. In Future Ge-
neration Computer Systems.
OpenACC, A. T. (2017). The OpenACC Application Pro-
gramming Interface. OpenACC-Standard.org, 2.6 edi-
tion.
R. Allaoui, H. H. Mouane, Z. A. S. M. I. E. h. A. E. m.
(2017). Fpga-based implementation of optical flow
algorithm. In 3rd International Conference on Elec-
trical and Information Technologies ICEIT.
S. Baker, I. M. (2004). Lucas kanade 20 years on:a unifying
framework. In International Journal of Computer Vi-
sion.
S. N.Tamgade, V. R. (2009). Motion vector estimation of vi-
deo image by pyramidal implementation of lucas ka-
nade optical flow. In Second International Conference
on Emerging Trends in Engineering and Technology,
ICETET.
S.A. Mahmoudi, M.Kierzynka, P. M. K. K. (2014). Real-
time motion tracking using optical flow on multiple
gpus. In Bulletin of The Polish Academy Of Sciences
Technical Sciences.
T. Allen, R. G. (2016). Characterizing power and perfor-
mance of gpu memory access. In E2SC2016 Salt Lake
City.
V. Tarasenko, D. P. (2016). Detection and tracking over
image pyramids using lucas and kanade algorithm. In
International Journal of Applied Engineering Rese-
arch.
Y. Song, R. Xu, C. W. Z. L. (2004). Improving data lo-
cality by array contraction. In IEEE Transactions on
Computers.
Efficient GPU Implementation of Lucas-Kanade through OpenACC
775
