
Techniques for Automated Classification and Segregation of Mobile
Mapping 3D Point Clouds
Johannes Wolf, Rico Richter and J
¨
urgen D
¨
ollner
Hasso Plattner Institute, Faculty of Digital Engineering, University of Potsdam, Germany
Keywords:
Mobile Mapping, 3D Point Cloud, Classification, Semantics, Geodata.
Abstract:
We present an approach for the automated classification and segregation of initially unordered and unstruc-
tured large 3D point clouds from mobile mapping scans. It derives disjoint point sub-clouds belonging to
general surface categories such as ground, building, and vegetation. It provides a semantics-based classifi-
cation by identifying typical assets in road-like environments such as vehicles and post-like structures, e. g.,
road signs or lamps, which are relevant for many applications using mobile scans. We present an innovative
processing pipeline that allows for a semantic class detection for all points of a 3D point cloud in an automated
process based solely on topology information. Our approach uses adaptive segmentation techniques as well
as characteristic per-point attributes of the surface and the local point neighborhood. The techniques can be
efficiently implemented and can handle large city-wide scans with billions of points, while still being easily
adaptable to specific application domains and needs. The techniques can be used as base functional compo-
nents in applications and systems for, e. g., asset detection, road inspection, cadastre validation, and support
the automation of corresponding tasks. We have evaluated our techniques in a prototypical implementation on
three datasets with different characteristics and show their practicability for these representative use cases.
1 INTRODUCTION
Remote sensing technology (e. g., LiDAR) captures
our physical environment at different scales with high
precision using various carrier platforms (Schwarz,
2010); mobile mapping systems, for example, are
commonly used in the case of urban environments
and infrastructure networks. The resulting 3D point
clouds have established themselves as both effi-
cient and effective discrete digital representations of
geospatial data (Vosselman et al., 2004) (“digital
twins”), used in a variety of application fields, e. g.,
for urban planning, disaster management (Biasion
et al., 2005), infrastructure monitoring and inspec-
tion (Teizer et al., 2005), facility management (Tang
et al., 2010), etc. Technically, they are stored as col-
lections of unstructured, unsorted, independent points
in three-dimensional space with optional attributes at-
tached to each point (Richter et al., 2013) (e. g., RGB
colors).
Besides aerial scans, mobile mapping techniques
have been established and used systems consist
“mainly of a moving platform, navigation sensors,
and mapping sensors” (Li, 1997); mobile carrier plat-
forms such as cars or trains are used to capture en-
tire infrastructure networks. Use cases include “street
view” services, urban planning, pothole detection,
risk analysis, e. g., for trees damaged in a storm, in-
frastructure monitoring, and inspection of clearance
areas along roads and railroads. Mobile mapping
scans can be used to, e. g., automatically construct
road networks, detect and monitor assets, or to an-
alyze road surfaces (Jaakkola et al., 2008), as well
as for the reconstruction of building fac¸ades. 3D
point clouds in combination with fac¸ade images can
be used to extract window structures and to construct
complete building models (Becker and Haala, 2007),
which is important for simulations.
Applications typically require only subsets of the
3D point cloud data, e. g., points representing struc-
tures of a specific semantic type, such as roads, build-
ings, or certain assets. A manual classification is
neither viable nor practicable for complex objects or
large areas, e. g., entire cities, due to the massive
amount of data. Thus, automation represents a key
requirement for 3D point cloud classification. From
a computational perspective, key challenges include
efficient and adaptable classification and segregation
algorithms for 3D point clouds taking into account
object-based and semantics-based criteria (Weinmann
Wolf, J., Richter, R. and Döllner, J.
Techniques for Automated Classification and Segregation of Mobile Mapping 3D Point Clouds.
DOI: 10.5220/0007308802010208
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2019), pages 201-208
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
201
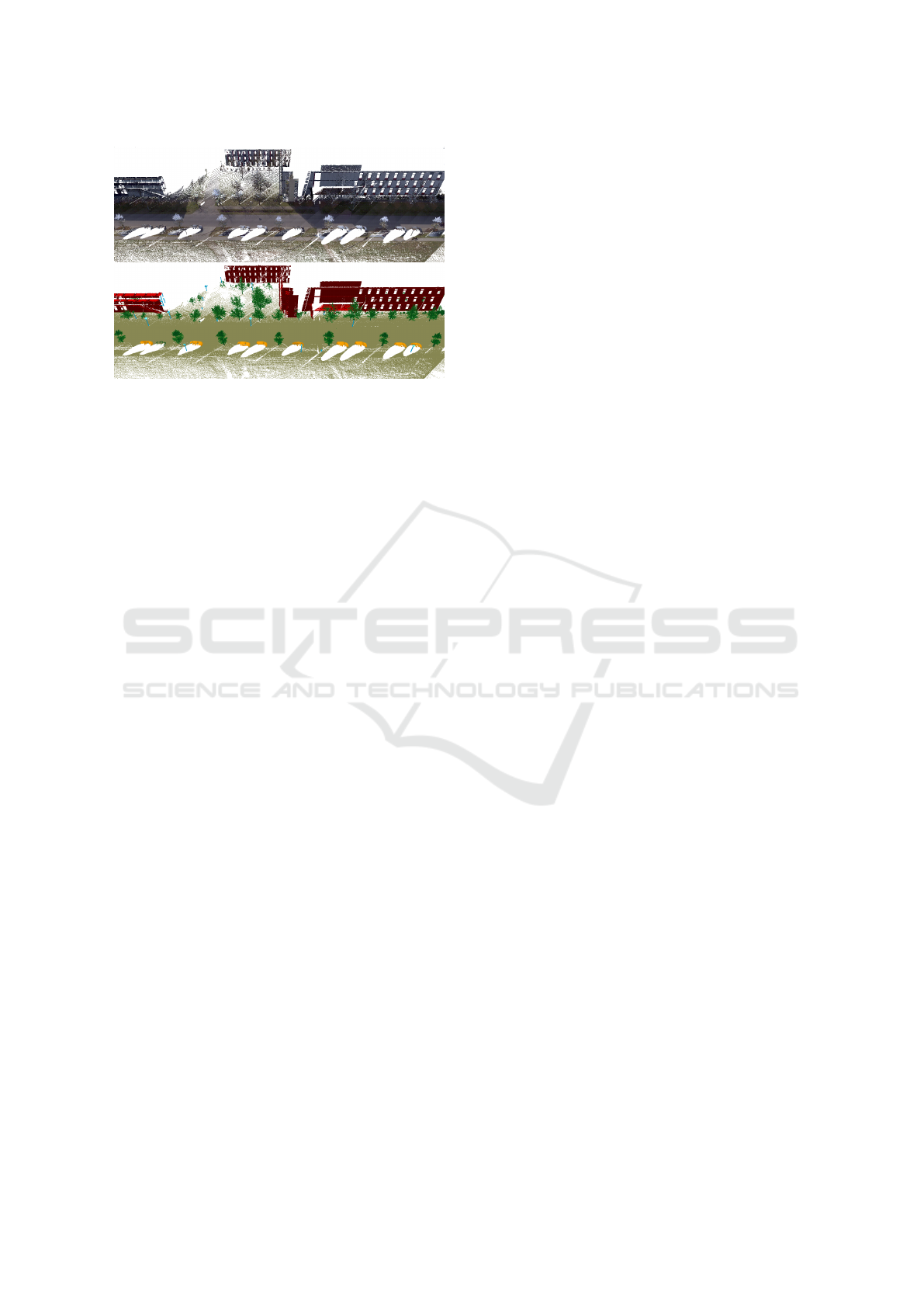
Figure 1: 3D point cloud of an urban area in RGB (top) and
segregated into sub-clouds colored by semantic class (bot-
tom). Ground: brown. Building: red. Vegetation: green.
Vehicle: orange. Post-like structure: blue.
et al., 2013).
Most classification approaches for aerial data
implicitly assume an aerial perspective respectively
heightfield-based point distributions (Charaniya et al.,
2004). Hence, they cannot be effectively applied
when it comes to mobile mapping scans that show
different geometric characteristics and point distribu-
tions. State-of-the-art approaches for classifying mo-
bile mapping scans often focus on detecting a single
semantic class. This paper concentrates on semantics-
based classification based on the categories ground,
building, vegetation, vehicle and post-like structure
like lamps and signs, as shown in Figure 1.
In addition, we provide a scalable implementation
based on out-of-core concepts to cope with large 3D
point clouds (e. g., several terabytes of data) without
having to reduce density or precision in preprocess-
ing steps. All in all, this allows us automated classi-
fication and segregation via a processing pipeline that
consists of multiple steps. Step by step, we compute
and assign a semantic attribute to each point of the 3D
point cloud given as input data.
2 RELATED WORK
Niemeyer et al. (Niemeyer et al., 2012) distinguish
the five object classes “building”, “low vegetation”,
“tree”, “natural ground”, and “asphalt ground” in 3D
point clouds. Rutzinger et al. (Rutzinger et al., 2008)
separate vegetation from non-vegetation. While most
papers work on aerial 3D point clouds, classifica-
tion has also been done for terrestrial scans, e. g., by
N
¨
uchter et al. (N
¨
uchter et al., 2006), who classify
points captured by a rescue robot driven indoors.
In general, separating vegetation from man-made
objects is a very essential step in the classification
process as described by Yao and Fan (Yao and Fan,
2013) and Grilli et al. (Grilli et al., 2017). Yao and
Fan first apply a segmentation on the 3D point cloud
and then classify trees within the data. Meinel and
Hecht (Meinel and Hecht, 2005) describe an approach
to find areas with vegetation within mobile mapping
data. Rutzinger et al. (Rutzinger et al., 2011) analyze
tree parameters like crown diameter and stem height
for individual trees in 3D point clouds from mobile
mapping scans. They create 3D models for a “rep-
resentative and natural appearance of the individual
trees considering the real dimensions of stems and
tree crowns”.
In some cases the classification is based on prob-
abilistic Markov networks (Triebel et al., 2006); an-
other approach analyzes the 3D point cloud’s topol-
ogy by specific characteristics like described by
Richter et al. (Richter et al., 2013). They do not re-
quire per-point attributes or any training data and base
their approach on an “iterative multi-pass processing
scheme, where each pass focuses on different topo-
logical features and considers already detected object
classes from previous passes”.
Besides buildings, vehicles, and vegetation,
cylinder-shaped structures (street lamps, signs, tree
stems) are found in most mobile mapping contexts.
A detection of lamps and road signs was done by
Lehtom
¨
aki et al. (Lehtom
¨
aki et al., 2010), who ex-
tracted “pole-like objects” from mobile mapping data.
Pu et al. (Pu et al., 2011) describe techniques to find
posts and street signs and how these signs can be iden-
tified by their shapes. Fukanu and Masuda (Fukano
and Masuda, 2015) convert 3D point clouds into wire
frame models and use supervised machine learning
methods to detect utility poles, street lamps, traffic
signals, and other post-like objects. Aijazi et al. (Ai-
jazi et al., 2013) use a voxelization approach for their
segmentation.
3 CLASSIFICATION METRICS
This paper introduces an approach for the classifica-
tion and segregation of large 3D point clouds from
mobile mapping scans. Per-point metrics are com-
puted in a multipass process. The classification tech-
niques are based on the analysis of additional per-
point attributes such as normal vector values and seg-
ment information. These attributes are computed for
all points of the point cloud prior to the classifica-
tion. Adaptive segmentation is applied to the datasets,
which can then be segregated into sub-clouds based
on these metrics.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
202

3.1 Local Point Density
The local point density of a point is defined as the
number of neighboring points in a certain volume
around the point divided by the size of this volume.
This value can be used to filter outliers and is used as
a metric during the classification process.
3D point clouds from mobile mapping scans usu-
ally have hugely varying point densities depending on
the distance from the scanner to the target, causing the
need for an adaptive analysis.
An exact computation for local point density uses
a sphere with a specified radius around each point and
uses the number of points within this sphere divided
by its volume as the respective density value for the
point in the center of the sphere. However, to be able
to process large datasets in a short amount of time, an
approximate computation is used instead. The scene
gets separated into regular cube shaped voxels of a
defined size and all points are assigned to the voxel
surrounding their position. Counting the number of
points in each voxel and dividing this number by the
voxel’s volume results in a density value for each
voxel. The density for a point is defined based on
the number of points in surrounding voxels. This ap-
proach is less precise, but much faster than the indi-
vidual neighbor search using a sphere. As a trade-
off, a side length of, e. g, 0.33 meters for the voxels
has shown to deliver good results in different test data
sets. Figure 2a shows a visualization of the local point
density.
The local point density can now be used to iden-
tify areas, where point information is too sparse to
make qualified statements about the semantic class of
a point. Only points with a density higher than a given
threshold of, e. g., 100 points per cubic meter are kept
in the classification process.
3.2 Segment Size
A 3D point cloud can be segmented into disjoint
sub-clouds, each segment grouping together points
with similar properties based on different criteria, like
color, position, or normal vector orientation. In the
context of classification, the segmentation creates in-
dividual segments for each object in the scanned en-
vironment. For example, all points of a vehicle will
optimally be grouped into one individual segment.
To achieve this segmentation, the position of points
is used as well as their normal vector orientation to
find connected surfaces (Rabbani et al., 2006) during
a preprocessing step. Points belonging to the same
surface are assigned the same segment ID which is
stored as per-points attribute.
(a) Local point density. Blue
points have the lowest local
density, red points the high-
est.
(b) Segmentation. Points
with the same segment ID
have the same color.
(c) Segment density. Blue
points have the smallest seg-
ment density, red points the
highest.
(d) Verticality. Blue points
have the smallest verticality,
red points the highest.
Figure 2: Visualization of the different metrics.
Figure 2b shows the resulting segmentation. The
number of points belonging to the same segment is
used as a metric during the classification process.
Building fac¸ades usually result in segments with a
large number of points due to their planar structure.
Vegetation on the other hand typically consists of
many segments with a small number of points.
3.3 Segment Density
The segment density of a point represents the number
of distinct segments that are positioned around this
point. It is used to identify regions with a large num-
ber of segments, which is usually the case for vege-
tation areas. As described before, the segmentation
aims to group points of the same object into one seg-
ment. Vegetation however is usually not segmented
into clearly separated objects by the used segmenta-
tion process because of its unstructured surfaces and
varying per-point normals.
The segment density can thus be used as a met-
ric to find areas with many small segments to iden-
tify vegetation. For each part of the scene, e. g., each
voxel within a voxel grid, the number of segments
which have at least some of their corresponding points
in this voxel or one of the surrounding voxels, is
counted. Regions where this number is distinctively
higher than on average are usually vegetation areas.
Figure 2c shows a visualization of the segment den-
sity.
Techniques for Automated Classification and Segregation of Mobile Mapping 3D Point Clouds
203

3.4 Verticality
The verticality value of a point describes the percent-
age of neighboring points forming a vertically ori-
ented surface. It is used to separate upright structures
like building fac¸ades from ground points and rounded
objects.
The verticality is defined as the percentage of
neighboring points within the same voxel, which have
a horizontally oriented normal vector. All normal vec-
tors with an angle between 80 and 100 degrees to the
up vector are counted as horizontally oriented in our
implementation. Figure 2d shows a visualization of
the verticality metric.
Building fac¸ades have mostly horizontally facing
normal vectors, so they differ from their surroundings.
Ledges can have other orientations in their normal
vectors, but most parts of the fac¸ades can be identi-
fied using this metric.
4 CLASSIFICATION APPROACH
The classification uses the metrics described above
to determine the semantic class for each point of a
3D point cloud and to create the according segre-
gation into sub-clouds. A preprocessing step takes
place before the individual detection steps: First, all
points with a local point density significantly lower
than the average are filtered and marked as outliers.
All outliers are excluded from the following classifi-
cation process. Second, individual normal vectors are
computed for each point and a segmentation based on
these normal vectors is applied to the dataset.
After the preprocessing step, points for each of the
semantic classes are segregated into the appropriate
sub-cloud.
4.1 Ground Detection
Ground points in mobile mapping data have simi-
lar characteristics as ground points in aerial data, al-
though point density and coverage differ. Existing
algorithms are based on the assumption that ground
points are usually the lowest points in a scanned area.
Tests show that an established technique for ground
detection in aerial data can be reused for the mobile
mapping classification.
The algorithm divides the covered area into a reg-
ular two-dimensional grid. For each grid cell, the
minimum z-value of all points, which fall into this
cell, is stored. The result is a simplified terrain model.
This approach is originally based on the paper by
Meng et al. (Meng et al., 2009). It was refined by
adding additional diagonal scan lines.
After the grid was initialized, scan lines are used
to find all ground points of the 3D point cloud. These
scan lines move axis-aligned in positive and nega-
tive direction as well as diagonally through the grid.
The algorithm takes into account the slope found in
the different scanning directions and how the eleva-
tion differs between points and the minimum eleva-
tion in their local neighborhood. A majority voting
takes place, whether a point is a ground point from
the view of each of the scan lines or not. When more
scan lines find the point to be a ground point than a
non-ground point, the semantic class attribute is set to
ground.
All following classification steps analyze and op-
erate on the remaining points which are not part of the
ground points sub-cloud.
4.2 Building Detection
Buildings are typically the largest objects in mobile
mapping scans, their fac¸ades form the most charac-
teristic structures in the data and are processed next
in the classification pipeline.
Buildings in typical urban areas mostly consist of
planar vertical faces. Windows and doors are also part
of the buildings as well as balconies and roof edges.
As planar faces usually result in large segments, all
segments with a small number of points are removed
from the analysis when searching for fac¸ade points
in the data. The remaining segments are filtered by
their verticality. This metric was already described
in Section 3.4 and is used to find vertically oriented
faces.
The verticality is a value between 0 (perfectly hor-
izontal) and 1 (perfectly vertical). Segments must at
least have a verticality of 0.6 to remain candidates
for the building classification. All points of the seg-
ments fulfilling these criteria are classified as building
points. Not all points that actually belong to buildings
are part of these remaining segments. Many points
have been separated from the large segments and were
placed into smaller adjacent segments, which should
also be classified as building points. In a further step,
points that have not been classified yet can also get
the semantic class building, if they are located closely
to already classified building points.
All segments of the 3D point cloud that have not
already been classified are then checked one by one.
Figure 3 shows, in which step the points were classi-
fied as building points.
Large vertical segments (blue points) were found
by the process described before. Points in large seg-
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
204

Figure 3: Buildings in a 3D point cloud. Colors represent
the different steps in which the points were classified as
building points in the following order: blue, green, orange,
yellow.
ments that are within a 3m distance from the closest
segment already classified as building, also get classi-
fied as building points (green points), mainly adding
balconies and window frames. The same is done for
all other segments regardless of their size, where at
least two thirds of their points are within a 1.5 m dis-
tance (orange points). This adds more window frames
and other small structures. To detect roofs, large seg-
ments that are located above building points are also
classified as building points (yellow points).
For performance reasons, the distances mentioned
above are measured by placing all found building
points into a voxel grid and computing the distance
to the closest voxel filled with building points for all
voxels in the grid. In this way, every voxel has an at-
tribute describing the distance to the closest “building
voxel”.
4.3 Vehicle Detection
Detecting vehicles is more difficult than detecting
larger structures such as buildings. Where building
fac¸ades are very characteristic objects because of their
large planar surfaces, vehicles do not have such a
clear distinctive feature. Vehicles can have differ-
ent forms and sizes, but even when concerning buses,
the dimensions of vehicles are usually within certain
ranges, e. g., not wider than 2.5 meters. When fil-
tering for vehicles, the segments must have dimen-
sions within these ranges and need to be located on
the ground. The distance to the ground for a seg-
ment is determined by the average vertical height dis-
tance to ground points which are located beneath and
close to this segment. This approach determines the
ground distance also for segments that do not have
any ground points directly beneath them, as it is often
the case for parking vehicles. Segments which are not
located on the ground can then be removed from the
search for vehicle segments, all remaining segments
are classified as vehicle, as well as small directly ad-
jacent segments.
4.4 Post Detection
For the post detection, all remaining unclassified
points are placed into a voxel grid. All voxels are ex-
amined and if they contain more than just a few single
points, they are marked as being “filled”, otherwise as
“empty”. The voxels are analyzed as if representing
sliced pillars: For each x-y coordinate combination
in the grid all voxels positioned upon each other are
analyzed from bottom to top. As long as the voxels
are filled, they are part of a potential post structure.
To prevent finding thin, outstretched structures, vox-
els that have neighboring filled voxels together reach-
ing more than a meter in a horizontal direction, are
not processed as potential post voxels.
Once an end during the vertical processing is
found, because a voxel is empty or fails the restric-
tion described above, the height of the collected po-
tential post voxels is calculated. If they are larger
than 1.5 meters, they are marked as post voxels and
all points within them are classified as post-like struc-
ture, as well as small directly adjacent segments.
4.5 Vegetation Detection
The segment density is a good indicator for vegeta-
tion, as described in Section 3.3. Smaller structures
within fac¸ades can also have a high density of very
small segments, so the approach works best when be-
ing applied after the building detection.
For the given segmentation, vegetation consists of
a large number of small segments. The segment den-
sity is computed for all voxels in the scene for all
segments that remained unclassified after the previ-
ous steps. Points in voxels with a segment density
much higher than average and with adjacent voxels
with a similar high segment density are classified as
vegetation points.
5 SYSTEM IMPLEMENTATION
The prototypic implementation, which is integrated
into an existing pipeline-based 3D point cloud re-
search framework using C++, Qt and the Point Cloud
Library (PCL), supports customized pipelines con-
sisting of configurable and connectable nodes via a
graphical user interface. Each node is either an in-
put node, output node, or processing node. Input and
output nodes are providing I/O functionality and can
read or write data files in multiple formats. Processing
nodes encapsulate computations for the processing of
3D point cloud data. The discussed mobile mapping
Techniques for Automated Classification and Segregation of Mobile Mapping 3D Point Clouds
205

(a) Highway dataset colored
in captured RGB.
(b) Railroad dataset visual-
ized by grayscale intensity
values.
Figure 4: Screenshots of the second (a) and third (b) dataset.
classification is available as a processing node and can
be reused in custom pipeline configurations.
Normal vector computation is done using the
PCL, approximating the surface at each point using
the covariance matrix of neighboring points and the
corresponding eigenvectors and eigenvalues (Hoppe
et al., 1992). A segmentation based on the surface
described by the computed normal vectors (Rabbani
et al., 2006) completes the preprocessing.
Our processing pipeline homogenizes the data and
scans are converted into one common coordinate sys-
tem. Large point clouds are tiled into data chunks,
which can be processed out-of-core.
A viewing application is also part of the frame-
work (Richter et al., 2015). It can load large 3D
point clouds and the visualization can be customized
based on any per point attribute. The visualization
allows for experimentally identifying appropriate pa-
rameters and thresholds for the classification of a spe-
cific dataset.
6 EVALUATION
For this paper, three real-world datasets with differing
characteristics have been analyzed:
One dataset contains urban and suburban areas
with an average point density of 3 450 points/m
2
on
the road. Parked vehicles on the roads often cause
“shadowed” areas in this dataset, where no points
have been captured behind objects. Images from the
dataset are shown in figures 1, 2, and 3.
The second dataset was captured on an on-ramp
of a highway. It has an average road point density of
1 325 points/m
2
. This dataset does not contain other
vehicles and only low-growing vegetation.
A third dataset contains points captured by a train
on a railroad track. The average point density on the
track is 1 250 points/m
2
. The second and third dataset
are shown in Figure 4.
We have evaluated performance and accuracy of
our techniques using these mobile mapping scans.
Table 1: Performance measurements. Density values are
ground points per square meter. Time values are averaged
based on three test runs with identical parameters and those
for specific classification steps are normalized per 1 000 000
points.
Urban area Highway Railroad
Data charac-
teristics
Number of points 18963 664 7373 756 6647 423
Number of segments 547324 146543 601152
Volume of bounding box 7190 580 m
3
2461 368 m
3
625000 m
3
Average density 3450 p/m
2
1325 p/m
2
1250 p/m
2
Maximum density 32124 p/m
2
2484 p/m
2
3494 p/m
2
Classification
results
Number of points, thereof 18963 664 7373 756 6647 423
. . . Ground 56.7% 36.3% 67.6%
. . . Building 30.4% 8.7% 0.8%
. . . Vehicle 4.3% 0.0% 0.0%
. . . Post 0.3% 0.2% 0.4%
. . . Vegetation 4.2% 2.8% 23.6%
. . . Unclassified 4.0% 52.0% 7.6%
Processing times
per million points
Classification, thereof 1.04s 5.55s 1.71s
. . . Preparation and Ground 0.25s 0.21s 0.22s
. . . Buildings 0.15s 0.29s 0.12s
. . . Vehicles 0.07s 0.05s 0.13s
. . . Posts 0.23s 4.69s 0.19s
. . . Vegetation 0.33s 0.29s 1.05s
Processing time for
complete point cloud 19.73s 40.93s 11.37s
The approach is able to handle large 3D point clouds
like city-wide scans in a both efficient and robust way,
while still being easily adaptable to specific applica-
tion domains and needs. Especially when taking into
account how much time can be saved when exploring
a 3D point cloud with semantics information in con-
trast to an unclassified 3D point cloud, the presented
methods prove to be suitable for the classification of
dense 3D point clouds from mobile mapping scans for
large areas.
In the urban test region all building points have
been correctly classified. All ground points in areas
with a sufficient point density were found. 22 of 24
lamp posts and street signs were correctly detected
and 19 of the 22 existing vehicles were found, only
one group of points from a hedge was erroneously
classified as vehicle.
In an evaluation of the railroad dataset ground
points and building points were correctly identified.
All 15 signal and utility poles between the rails were
correctly detected.
However, some issues in the classified results ex-
ist. Especially bridges like the on-ramp of the high-
way pose a problem. The applied ground detection
does not detect the upper ground levels, so these re-
main unclassified. The dataset does not contain vehi-
cles or trees. This explains the high number of points
that remain unclassified in this dataset and a large
number of points is handed over from one classifica-
tion step to the next, resulting in a long processing
time.
The classification can efficiently be used for entire
cities, Table 1 shows the processing times for the three
exemplary datasets.
The complete mobile mapping dataset of the ur-
ban area consists of about 50 billion points, covers
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
206

100km
2
, and uses about 920 GB of storage space.
Extrapolating the measured times for the test areas
shows that a classification for the complete city takes
less than 15 hours for the complete dataset.
7 SUMMARY AND
CONCLUSIONS
Classifying and segregating 3D point clouds from
mobile mapping scans represent key functionality as
it provides semantics information and allows for effi-
cient processing of large data sets. The implemen-
tation divides ground points from building fac¸ades
and vegetation; it is able to find vehicles as well as
post-like structures like street lamps and sign posts.
Concepts for ground detection from the field of aerial
point clouds can also be used in that framework. In
particular, the local point-density metrics turned out
to allow us to manage the greatly varying point den-
sity typical for mobile mapping scans and can be used
to filter areas unsuitable for classification if the local
point-density falls under a given threshold.
Tests on different datasets show that the tech-
niques can be used to automatically and correctly
identify the semantic class points belong to, whereby
we obtained the best results for ground and build-
ings. Detecting vehicles as well as distinguishing
lamp posts from tree stems require a more detailed
analysis and highly depend on the quality of the ap-
plied segmentation.
Defining the order of processing steps enables us
to select the most distinctive metrics of each semantic
class one at a time and, thereby, permits using the re-
sults of previous classification steps. The processing
speed can be significantly accelerated using a voxel
grid as spatial datastructure, i. e., the voxel-based met-
rics are used and their results can be applied to all
points in the respective voxel if approximate values
are sufficient for the current use case.
The approach also allows for a computationally
fast exploration of points of a specific semantic sub-
cloud and supports filtering options in viewing appli-
cations for detailed analysis of those objects the user
is interested in. In our test scenarios, the classification
could analyze about 34 million points per minute.
In summary, the object-based and semantics-
based classification and segregation techniques serve
as key components to process and manage large 3D
point clouds from mobile mapping scans, e. g., for
systems dedicated to asset detection, road inspection,
cadastre validation, or municipal tasks. Semantic
classification offers a number of applications, e. g.,
using different 3D rendering techniques for each cat-
egory, and reduces the amount of data to be processed
for the respective category, e. g., by storing and man-
aging only those sub-clouds relevant to the applica-
tion’s purpose.
While the results of our study show that the de-
scribed classification is already beneficial and robust
for analyzing mobile mapping scans, the algorithms
could be further improved in multiple ways. Separat-
ing buildings from ground and vegetation is the most
important differentiation when segmenting 3D point
clouds. However, the more detailed the classifica-
tion gets, the more use cases can be covered with the
data. The existing semantic classes could be used and
split into multiple subclasses: Introducing a more de-
tailed differentiation of ground points into road, curbs
and sidewalks would support the detection of cars and
lamp posts because assumptions about their locations
could be made. Buildings could be separated into
fac¸ades, doors and windows, balconies and the roof.
Finding doors in buildings would enable evaluations
about accessibility, especially in combination with the
analysis of curb stone heights.
Mobile mapping data often contains cars and
buses on the roads. A detection of cars was already
implemented, but it requires each car to be segmented
into only one large segment for best results. It would
make sense to improve the algorithm so that it can de-
tect adjacent segments, which together form a struc-
ture with certain characteristics.
Besides of filtering points in areas with low den-
sity, points inside of buildings could also be detected.
If the location relative to already classified buildings
can be identified, this enables finding points that were
created because of reflective surfaces as well as points
that have been scanned through a building’s windows.
Those points could then be removed from the classi-
fication.
3D point clouds from mobile mapping scans could
be combined with data from aerial scans as well as
cadastral data, which would enrich the available data
pool. If data sets are combined taken at different
points in time, 4D point clouds result. Extending the
classification and segmentation by a temporal com-
ponent would allow for new features. For exam-
ple, static objects like buildings would become dis-
tinguishable from mobile objects like cars, which are
not permanently fixed to a specific position. 4D point
cloud enable analyses of areas that are occluded in
one scan, but might be available in another scan of the
same area or they could be used to analyze the same
region at different times of the year, showing changes
in foliation, vegetation growth, and the creation and
destruction of buildings.
Techniques for Automated Classification and Segregation of Mobile Mapping 3D Point Clouds
207

REFERENCES
Aijazi, A. K., Checchin, P., and Trassoudaine, L. (2013).
Segmentation based classification of 3d urban point
clouds: A super-voxel based approach with evalua-
tion. Remote Sensing, 5(4):1624–1650.
Becker, S. and Haala, N. (2007). Combined feature extrac-
tion for fac¸ade reconstruction. In Proceedings of the
ISPRS Workshop Laser Scanning, pages 241–247.
Biasion, A., Bornaz, L., and Rinaudo, F. (2005). Laser scan-
ning applications on disaster management. In Geo-
information for Disaster Management, pages 19–33.
Springer.
Charaniya, A. P., Manduchi, R., and Lodha, S. K. (2004).
Supervised parametric classification of aerial lidar
data. In Conference on Computer Vision and Pattern
Recognition Workshop, 2004, pages 1–8. IEEE.
Fukano, K. and Masuda, H. (2015). Detection and clas-
sification of pole-like objects from mobile mapping
data. ISPRS Annals of Photogrammetry, Remote Sens-
ing and Spatial Information Sciences, 1:57–64.
Grilli, E., Menna, F., and Remondino, F. (2017). A review
of point clouds segmentation and classification algo-
rithms. The International Archives of Photogramme-
try, Remote Sensing and Spatial Information Sciences,
42:339.
Hoppe, H., DeRose, T., Duchamp, T., McDonald, J., and
Stuetzle, W. (1992). Surface reconstruction from un-
organized points. Computer Graphics (SIGGRAPH
’92 Proceedings), 26(2):71–78.
Jaakkola, A., Hyypp
¨
a, J., Hyypp
¨
a, H., and Kukko, A.
(2008). Retrieval algorithms for road surface mod-
elling using laser-based mobile mapping. Sensors,
8:5238–5249.
Lehtom
¨
aki, M., Jaakkola, A., Hyypp
¨
a, J., Kukko, A., and
Kaartinen, H. (2010). Detection of vertical pole-
like objects in a road environment using vehicle-based
laser scanning data. Remote Sensing, 2(3):641–664.
Li, R. (1997). Mobile mapping: An emerging technology
for spatial data acquisition. Photogrammetric Engi-
neering and Remote Sensing, 63(9):1085–1092.
Meinel, G. and Hecht, R. (2005). Reconstruction of ur-
ban vegetation based on laser scanner data at leaf-off
aerial flight times–first results. Proceedings of the 31st
International Symposium on Remote Sensing of Envi-
ronment.
Meng, X., Wang, L., Silv
´
an-C
´
ardenas, J. L., and Currit, N.
(2009). A multi-directional ground filtering algorithm
for airborne lidar. ISPRS Journal of Photogrammetry
and Remote Sensing, 64(1):117–124.
Niemeyer, J., Rottensteiner, F., and Soergel, U. (2012).
Conditional random fields for lidar point cloud classi-
fication in complex urban areas. ISPRS annals of the
photogrammetry, remote sensing and spatial informa-
tion sciences, 1(3):263–268.
N
¨
uchter, A., Wulf, O., Lingemann, K., Hertzberg, J., Wag-
ner, B., and Surmann, H. (2006). 3d mapping with
semantic knowledge. In RoboCup 2005: Robot Soc-
cer World Cup IX, pages 335–346. Springer.
Pu, S., Rutzinger, M., Vosselman, G., and Elberink, S. O.
(2011). Recognizing basic structures from mobile
laser scanning data for road inventory studies. IS-
PRS Journal of Photogrammetry and Remote Sensing,
66(6):28–39.
Rabbani, T., Van Den Heuvel, F., and Vosselmann, G.
(2006). Segmentation of point clouds using smooth-
ness constraint. International Archives of Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, 36(5):248–253.
Richter, R., Behrens, M., and D
¨
ollner, J. (2013). Object
class segmentation of massive 3d point clouds of ur-
ban areas using point cloud topology. International
Journal of Remote Sensing, 34(23):8408–8424.
Richter, R., Discher, S., and D
¨
ollner, J. (2015). Out-of-
core visualization of classified 3d point clouds. In 3D
Geoinformation Science: The Selected Papers of the
3D GeoInfo 2014, pages 227–242. Cham: Springer
International Publishing.
Rutzinger, M., H
¨
ofle, B., Hollaus, M., and Pfeifer, N.
(2008). Object-based point cloud analysis of full-
waveform airborne laser scanning data for urban veg-
etation classification. Sensors, 8:4505–4528.
Rutzinger, M., Pratihast, A. K., Oude Elberink, S. J., and
Vosselman, G. (2011). Tree modelling from mo-
bile laser scanning data-sets. The Photogrammetric
Record, 26(135):361–372.
Schwarz, B. (2010). Lidar: Mapping the world in 3d. Na-
ture Photonics, 4(7):429.
Tang, P., Huber, D., Akinci, B., Lipman, R., and Lytle, A.
(2010). Automatic reconstruction of as-built building
information models from laser-scanned point clouds:
A review of related techniques. Automation in con-
struction, 19(7):829–843.
Teizer, J., Kim, C., Haas, C., Liapi, K., and Caldas, C.
(2005). Framework for real-time three-dimensional
modeling of infrastructure. Transportation Research
Record: Journal of the Transportation Research
Board, 1913:177–186.
Triebel, R., Kersting, K., and Burgard, W. (2006). Robust
3d scan point classification using associative markov
networks. In Robotics and Automation, 2006. ICRA
2006. Proceedings 2006 IEEE International Confer-
ence on, pages 2603–2608. IEEE.
Vosselman, G., Gorte, B. G., Sithole, G., and Rabbani,
T. (2004). Recognising structure in laser scanner
point clouds. International archives of photogramme-
try, remote sensing and spatial information sciences,
46(8):33–38.
Weinmann, M., Jutzi, B., and Mallet, C. (2013). Feature rel-
evance assessment for the semantic interpretation of
3d point cloud data. ISPRS Annals of the Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, II-5/W2:313–318.
Yao, W. and Fan, H. (2013). Automated detection of 3d
individual trees along urban road corridors by mo-
bile laser scanning systems. In Proceedings of Inter-
national Symposium on Mobile Mapping Technology
(MMT), Tainan City, Taiwan, volume 13.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
208
