
A Video-texture based Approach for Realistic Avatars of Co-located
Users in Immersive Virtual Environments using Low-cost Hardware
Robin Horst
1,2,3
, Sebastian Alberternst
1
, Jan Sutter
1
, Philipp Slusallek
1
, Uwe Kloos
2
and Ralf D
¨
orner
3
1
German Research Center for Artificial Intelligence (DFKI), Saarbr
¨
ucken, Germany
2
Reutlingen University of Applied Sciences, Reutlingen, Germany
3
RheinMain University of Applied Sciences, Wiesbaden, Germany
uwe.kloos@reutlingen-university.de
Keywords:
Mixed Reality, Video Avatar, Multi-user Environments, Low-cost, Computer-supported Cooperative Work,
Image Segmentation.
Abstract:
Representing users within an immersive virtual environment is an essential functionality of a multi-person
virtual reality system. Especially when communicative or collaborative tasks must be performed, there exist
challenges about realistic embodying and integrating such avatar representations. A shared comprehension
of local space and non-verbal communication (like gesture, posture or self-expressive cues) can support these
tasks. In this paper, we introduce a novel approach to create realistic, video-texture based avatars of co-
located users in real-time and integrate them in an immersive virtual environment. We show a straight forward
and low-cost hard- and software solution to do so. We discuss technical design problems that arose during
implementation and present a qualitative analysis on the usability of the concept from a user study, applying it
to a training scenario in the automotive sector.
1 INTRODUCTION
Avatars are digital representations of users in vir-
tual worlds. The high influence of realistic avatars
on the perception, cognition and social interaction of
users, compared to abstract user representations, is al-
ready accepted (e.g. (Latoschik et al., 2017; Bailen-
son et al., 2006; Waltemate et al., 2018; Roth et al.,
2016)). Indicated by these studies, a higher degree
of realism can improve the mentioned aspects con-
cerning the application in virtual reality (VR) and im-
mersive virtual environments (VEs), by transporting
human non-verbal cues.
Especially when it comes to social interaction and
communication, phenomenons like the Proteus Effect
(Yee and Bailenson, 2007) can be observed.
These studies also indicate limitations of the cur-
rent technical approaches to create highly realistic
avatars for virtual environments: Complex and costly
professional hardware setups are used (tracking, scan-
ning), a priori operations are needed (attaching track-
ing points, 3D scanning), avatars are ”baked” after
creation (e.g. deformation of clothes must be cal-
culated at the expense of performance), avatars are
rendered view-dependent (only one particular side of
the user is captured) and on software level, there exist
dependencies on (pre-trained) computer vision algo-
rithms to segment textures. It is also indicated, that
existing research focuses primarily on self-avatars
and not on the representation of co-located co-users.
In this paper, we propose a novel approach to
create realistic avatars of co-located users and inte-
grate them into immersive virtual environments. We
capture and process video-textures in real-time, rely-
ing on low-cost hardware only. We integrate the 2D
video-texture into the 3D environment by projecting
it onto a 2D plane and position it correctly into the
virtual world. These transformations are derived by
low-cost tracking hardware (e.g. HTC Vive). We pro-
pose a view-independent method to capture the tex-
tures from first person point of view (POV) using a
simple color + depth camera (e.g. Kinect v2) and
a rig. The textures of the co-located users are seg-
mented without relying on existing computer vision
methodology. We only require color and depth in-
formation and the room-scale tracking position. The
hereby created avatars transport many non-visual cues
and were received positively by participants of the
evaluation, who collaboratively solved spatial tasks.
Since a high degree of realism can also be achieved by
Horst, R., Alberternst, S., Sutter, J., Slusallek, P., Kloos, U. and Dörner, R.
A Video-texture based Approach for Realistic Avatars of Co-located Users in Immersive Virtual Environments using Low-cost Hardware.
DOI: 10.5220/0007311602090216
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 209-216
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
209

Figure 1: Fully integrated video-texture based avatar within the immersive virtual environment.
realistic avatar motions (Huang and Kallmann, 2009),
high physicality (Lok et al., 2014) or haptic feedback
(Kotranza et al., 2009), we explicitly focus on the re-
alistic visual appearance of avatars in this work.
With this paper, we make the following contribu-
tions:
• We illustrate a low-cost technical system with
a straight-forward algorithm to create real-time,
video-texture based avatars with a high degree of
visual realism by capturing and segmenting tex-
tures, integrating them into the immersive VE and
handling occlusions.
• Our approach delineates from related work by
combining the aspects: Low-cost hardware only,
no dependence on pre-trained computer vision for
segmentation, no a priori 3D scanning, no tex-
ture baking, view-independent rendering of the
avatars, focus on co-located user avatars.
• We discuss design challenges and solutions by re-
vealing issues during the hard- and software im-
plementations and evaluating the approach during
an application, within a training situation in the
automotive sector, and a user study.
The paper is organized as follows: Next, we relate our
approach to the existing work. Then, we show the de-
sign and an implementation of a prototype that incor-
porates our proposed approach. The paper is comple-
mented by an evaluation section and completed with
conclusions and future work.
2 RELATED WORK
Previous research in the creation and integration of
realistic avatars offered partial solutions for the men-
tioned restrictions. Systems used in (Roth et al., 2016;
Latoschik et al., 2017; Waltemate et al., 2018) are ca-
pable of creating highly realistic avatars and focus on
highly professional and costly hardware setups. In
(Latoschik et al., 2017) and (Waltemate et al., 2018),
the impact of avatar realism and personalization in
immersive VEs is studied, using 3D photogrammetric
scans of users. Self-avatars are produced thereby. The
authors of (Roth et al., 2016) however combine body
and facial expression tracking to map it on the avatars
at runtime. By using ”fishtank” VR, they propose
real-time avatars of co-users and propose a socially
immersive avatar mediated communication platform.
Work that focuses on the low-cost aspect (Regen-
brecht et al., 2017; Nordby et al., 2016) proposes uti-
lizing a Kinect camera to integrate video avatars of
live-captured, co-located (Nordby et al., 2016) or pre-
captured (Regenbrecht et al., 2017) co-users into the
immersive VE. The static cameras provide visual in-
formation from one perspective, so that the avatars are
rendered view-dependent. Texture information from
other perspectives is not represented in the VE. Simi-
lar specifications are indicated in early work by Kato
and Billinghurst (Kato and Billinghurst, 1999). Tex-
tures are captured and integrated dependent from the
view within an augmented reality (AR) conference
system. While the textures are highly realistic, they
are integrated without further integration processing
and displayed in a rectangular shape. Early work by
Suma et al. (Suma et al., 2011) proposes to use low-
cost depth sensors head worn and therefore addresses
similar problems, as the difficulty to use built-in and
black-box segmentation methods of the sensors, as-
suming a fixed position. An empty room with plenty
of space between the segmented person and the walls
or a fixed distance range is necessary in these so-
lutions respectively. We use a straight-forward ap-
proach using a separate low-cost tracker, dedicated to
the existing and consumer oriented VR-system, and a
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
210
thereon calculated bounding box (BB).
Pioneering work by Beck et al. (Beck et al., 2013)
makes use of multiple Kinects to capture video rep-
resentations of collaborators to display in the context
of a shared virtual environment. Whereas Maimone
et al. (Maimone and Fuchs, 2011) propose to use
multiple Kinects to utilize 3D-reconstruction meth-
ods and then place users’ representations within vir-
tual worlds. There also exists other work in the broad
field of real-time reconstruction of collocated or re-
mote collaborators in virtual and mixed reality set-
tings (e.g. (Lindlbauer and Wilson, 2018; Alexiadis
et al., 2013; Fairchild et al., 2017), which makes use
of similar technologies. We chose to use only a sin-
gle low-cost depth camera instead and integrated our
setup in a VE including and HMD for visualization.
In (Zhu et al., 2016), a Kinect and green screen
based approach is proposed to separate users’ textures
from the background. Depth compositing then com-
bines a live captured video of the immersive VE and
the video-texture avatar into a single 2D video stream.
This video stream is provided for a non-immersed au-
dience to share experiences of the immersed user and
the VE. This approach is close to fulfilling all criteria
that our approach aims at, but consequently, the video
texture approach does not integrate the avatar into the
immersive VE. Still, by incorporating the depth data,
(Zhu et al., 2016) already addresses occlusion han-
dling.
Occlusion handling is of high importance for the
integration of 2D video-texture avatars into an immer-
sive VE, too, in order to preserve a highly immersive
virtual world. Especially for the application in mixed
reality (MR) (Milgram et al., 1995) systems, the cor-
rect synthesis of real and virtual information is essen-
tial. Detailed information about this problem can be
found in current publications (e.g. (Walton and Steed,
2017; Regenbrecht et al., 2017; Hebborn et al., 2017;
Fischer et al., 2004; Kiyokawa et al., 2003)). This
work differentiates between the type of head-mounted
displays that are used for creating the MR environ-
ment. The type is either optical see-through (OST)
(e.g. Microsoft Hololens) or video see-through (VST)
(e.g. Oculus Rift, HTC Vive). While OSTs utilize
translucent display devices, VSTs augment the reality
by processing a digital video stream (Azuma, 1997).
While occlusion handling for OSTs is addressed in
(Kiyokawa et al., 2003), Phantom Model Rendering
is proposed in (Fischer et al., 2004) for calculating
occlusions for VST systems. The latter uses a priori
captured information about objects in the scene (e.g.
3D scans) and includes the volumetric depth informa-
tion about the objects within the occlusion handling.
3 LOW-COST VIDEO-TEXTURE
APPROACH
We address three key challenges with our approach:
At first, we illustrate the low-cost technical setup that
we rely on. Thereafter, we show how the video-
texture is acquired and then segmented into the hu-
man user’s texture and the background. Here, we pro-
pose an algorithm to elucidate the process. Finally,
we state how the video-texture is integrated into an
immersive VE.
3.1 Technical Setup
Our approach to create realistic avatars of co-located
users in immersive VEs uses a low-cost hardware in-
frastructure. A room-scale VR system is used to cre-
ate a tracked area, in which an immersed user and co-
located persons can move freely (Fig. 2). Here we
utilize an HTC Vive. To provide the video-texture
and additional spatial information, the immersed user
wears a head-mounted tracker-camera unit (tracam).
The tracam unit consists of a Microsoft Kinect v2
color+depth camera, a Vive tracker and a helmet-rig,
so that the tracam can be worn in addition to the HMD
(Fig. 3). Users that are supposed to be captured by
the tracam wear a Vive tracker only. On the software
level, a game engine is utilized to control the tracking
and rendering. Therefore, an instance of Unity runs
the system. It is hosted on a single PC.
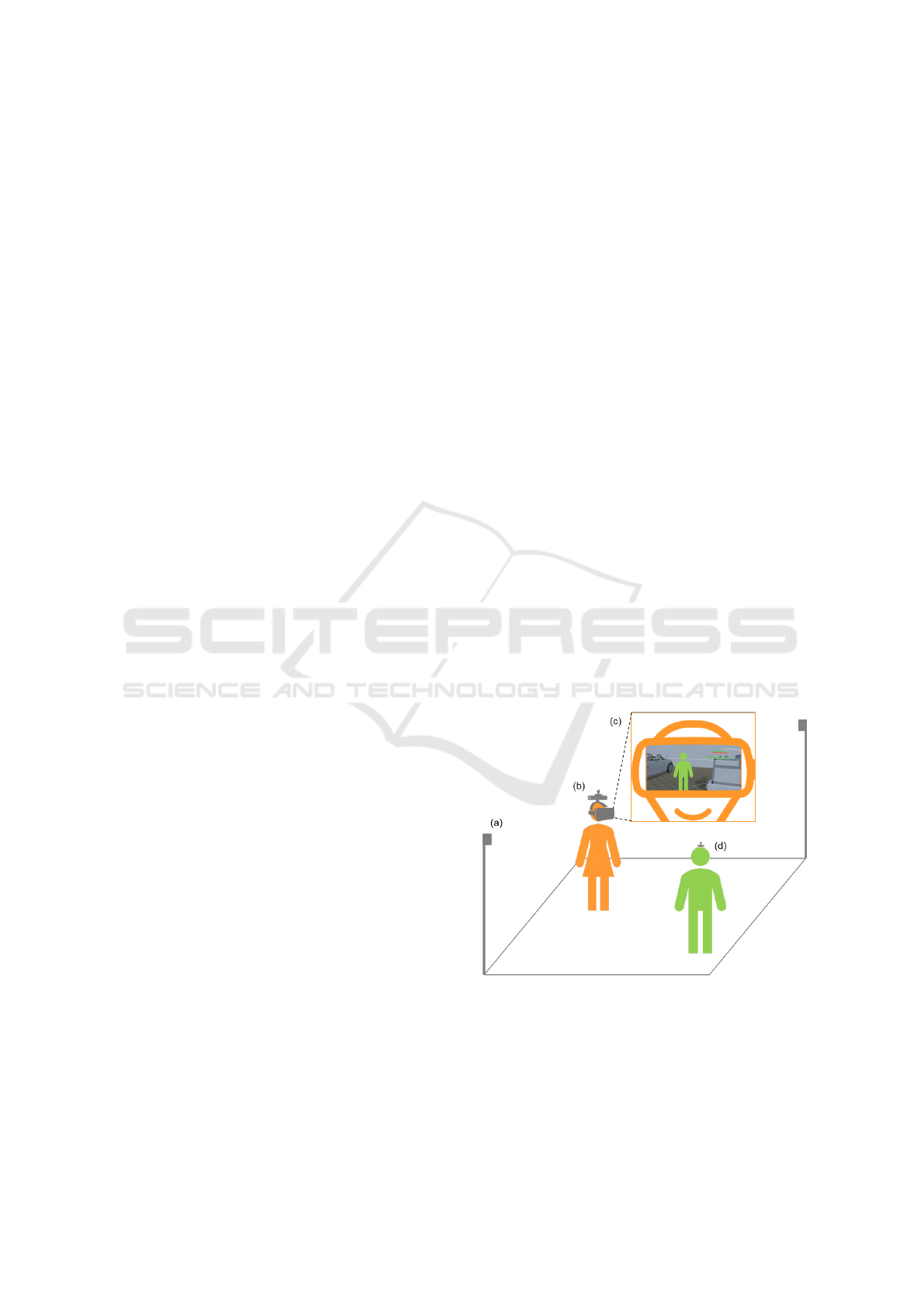
Figure 2: The spatial arrangement of the technical setup:
(a) a room-scale VR tracking system; (b) an immersed user
wearing a tracked HMD and a tracam unit; (c) the rendered
virtual view of the immersed user, augmented by a realistic
avatar representation of a co-located person with a tracker
(d).
With this technical setup, we are able to gather the
following data for further capturing of non-immersed
A Video-texture based Approach for Realistic Avatars of Co-located Users in Immersive Virtual Environments using Low-cost Hardware
211

peoples’ texture from the first person POV of the im-
mersed user:
• Color and depth data of the real environment, by
the Kinect, including co-located users
• Tracked positions of the HMD, the tracam and co-
located users, by the Vive tracking system
• Various data from the virtual Scene (e.g. view-
ing direction, color, 3D and depth), by the Unity
instance
Figure 3: The low-cost tracam unit. Left: standalone; right:
on top of an HTC Vive HMD.
3.2 Capturing People: Texture
Acquisition and Segmentation
The process of capturing surrounding people from
first person view of the immersed user is divided into
two sub-tasks. We use the tracam-unit to capture
color and correspondingly mapped depth information
in real-time from first person view of the immersed
user. Thereafter, we use a novel technique to segment
tracked co-located people, based on the position and
distance.
1. Color and depth image acquisition – We use the
Kinect camera’s sensors to capture a 1920x1080
pixel image in BGRA format and a 512x424 pixel
depth image. The values of the depth image are
mapped onto the color image correspondingly, so
that we can assume for further processing, that
both color and depth image information are avail-
able in 1920x1080 pixel resolution.
2. Human segmentation – Since we already make
use of the Kinect API to acquire and map color
and depth information in a naive implementation,
it would be obvious to use the pre-trained com-
puter vision back end of the Kinect API for seg-
mentation, which is based on random decision
trees (Shotton et al., 2011). To do so, the camera
must not be moved and is constrained to remain
in a static position. In our approach however, the
Figure 4: The schematic overview of the texture acquisition
and segmentation process: (a) the color information of the
real environment and (c) the corresponding depth image,
provided by the Kinect (as part of the tracam); (b) the virtual
BB, calculated by approximated human measures and the
tracked position; (d) the depth information of the VE from
first person perspective.
Kinect is part of the tracam and is mounted on the
immersed user’s head. Since the head is assumed
to move freely and continuous during a VR expe-
rience, the standard Kinect human segmentation
cannot be used in our approach.
We addressed this issue by using a novel approach
for object segmentation (Alg. 1). We utilize
the positions of the immersed user and the co-
located person to calculate a distance vector be-
tween them. Based on the tracking data of the co-
located person, a 3D BB is rendered in the Unity
instance, not visible to the users. Then an image is
rendered with the resolution of the Kinect images,
showing the BB from the immersed users perspec-
tive. The BB has the approximate measures of a
human body (Fig. 4 (b)). We divide the person’s
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
212

texture from the background pixelwise by check-
ing whether a pixel’s position falls onto a position
of the corresponding virtual BB and furthermore
has a distance to the tracam that is in range of an
approximated human body around the position of
the tracked co-located person. Thereafter, we seg-
ment the texture accordingly and pre-compute oc-
clusions by virtual objects. For that, we perform
a depth compositing, similar as described in (Zhu
et al., 2016), based on the depth information of
the VE view and the tracam.
Algorithm 1: Algorithm for VR bounding box segmentation
of one image.
INIT arrays: KinectDepthImage, KinectColorImage,
BB˙DepthImage, BB˙ColorImage, OutputImage
INIT ints: UserToUserDistance, BB˙Indices
1: fetch data from different external sources
2: wait until every source is available
3: for all pixels in KinectColorImage do
4: if (pixeldepth of KinectDepthImage = invalid)
or (pixelcolor of BB˙ColorImage ! = pure
white) or (pixeldepth of KinectDepthImage >
pixeldepth of BB˙DepthImage) then
5: write alpha value 0 in OutputImage pixel
6: else if (UserToUserDistance >= pixeldepth in
KinectDepthImage > 0 ) then
7: write pixelcolor of KinectColorImage in
OutputImage pixel and update BB˙Indices
8: else
9: write alpha value 0 in OutputImage pixel
10: end if
11: end for
12: if (BB˙Indices describe a valid bounding box)
then
13: send sub-image of OutputImage and
BB˙Indices to VE instance for further texture
integration
14: end if
3.3 Situating People: Integration Into
the Immersive VE
Since the co-located person’s texture is already seg-
mented, it remains to integrate the texture into the 3D
VE. We chose to project the texture onto a 2D plane.
This plane always orthogonally faces the virtual cam-
era that renders the VE within the HMD, since the
texture is captured from first person POV. We set the
size of the plane to the fixed resolution of 1920x1080
pixel, which is the maximum resolution of a texture
we can expect from the Kinect’s base image. The
plane’s distance to the virtual camera is adjusted ac-
cordingly to the tracked position of the co-located per-
son. Calculated BB indices are used to project only
relevant pixels on the plane. To preserve the correct
size of the avatar, we also adjust the absolute size, so
that longer distances to the camera result in upscaling
the texture (Fig. 5 bottom left and right). Hence, we
address occlusion handling and ensure that the tex-
ture covers a fixed size relative to the virtual view of
the immersed user (Fig. 5 top left and right). Also
included in this adjustment is the calibration of the
tracam and the virtual camera. This can be performed
automated and during runtime, since both the tracam
and the HMD are tracked independently, Differing an-
gles and scales of the head characteristics of individ-
ual users therefore are included.
Altogether, we refer to our approach as ”virtual
optical-video see-through”, since we combine charac-
teristics from the OST and the VST approach to cre-
ate a MR rendering: A texture is captured by a camera
(VST) and projected (OST), however not on a haptic
glass/display, but on a virtual plane.
Figure 5: Schematic of the adaptive texture arrangement
within the 3D VE. Green: Avatar-area of the rectangular
2D texture; orange: Boundary of the texture. Top left and
right: The virtual scene from POV of the immersed user;
bottom left and right: Corresponding side-view of the VE.
Regarding the occlusion handling of the texture
and the virtual scene, common approaches for VST
HMDs, as Phantom Model Rendering (Fischer et al.,
2004), cannot be applied. This is, because we exclude
a priori operations like scanning the co-located per-
son. The deformation and movement of the human
body complicate this approach, too. We already pre-
calculated occlusions by comparing the depth data of
the sources. Therefore, occlusions by objects, that are
closer to the camera than the distance values of the
texture, are handled appropriately.
A challenge that must be considered at this point,
is that the projection of the 3D data onto a 2D plane is
accompanied by a loss of one dimension. As a conse-
quence, the 2D plane could be placed behind a virtual
A Video-texture based Approach for Realistic Avatars of Co-located Users in Immersive Virtual Environments using Low-cost Hardware
213

object in the scene, because the tracked position is
behind the object. However, human extremities, like
an outreaching arm, could occlude parts of the object
that is rendered entirely in front of the texture. To
solve this problem, we propose an offset of the video-
textured plane towards the virtual camera. Since we
track the torso or head, we assume that we track the
middle position of the body and that extremities can
only deviate from this position by one length of an
arm. Practical tests with different distances indicated,
that for the test users 70cm offset counteracted most
of the occlusion problems, without visually effecting
the quality. This indicates a challenge to be addressed
in-depth in future work. The finally arranged and in-
tegrated texture is shown in Fig. 1.
4 EVALUATION
We already discussed several design issues of our
video-texture based approach for realistic avatars of
co-located users in immersive VEs using low-cost
hardware. Additionally, we evaluated the approach
in a preliminary qualitative user study on the usability
of the system and the perception of the video-avatars.
We applied the approach in a collaborative training
scenario, where a trainee was guided through a con-
struction environment in the automotive section. A
collaboration with the trainer was necessary to solve
several construction tasks.
4.1 User Study
The study involved 15 participants (10 male, aged
23 to 35, with Ø 27,37 and SD 3,85). They were re-
cruited from the environment of the local university
and engineering staff of the faculty of computer sci-
ence. The system ran on the technology described in
section 3 using a single windows machine (Intel Core
i7 (3,5 GHz), 32 GB RAM, AMD Radeon R9 Fury).
The HTC Vive system was utilized to calibrate a ∼
12m
2
tracked area for interaction.
The following sequenced procedure (after
(MacKenzie, 2012)) was performed during the user
study: Participants were welcomed and asked to
fill out a demographic questionnaire. Thereafter
they were instructed about the technical setup of
the study. After about 12 minutes of participation
and interaction with the experimenter (as co-located
person) in a collaboratively spatial task environment,
they were asked to fill out a post-study questionnaire.
The experimenter could see himself within the virtual
world on an external screen, using an approach as in
(Zhu et al., 2016). Additionally, a semi-structured
interview about the experience was conducted.
The design of the questionnaire items was related
to subjective perception of the scene and the collab-
orator avatars. Open-ended questions were used to
gather qualitative comments about satisfaction. The
content of the VE and its task were related to car as-
sembly, assuming that none of the participants had
prior knowledge.
4.2 Discussion
We evaluated the qualitative results interview by iden-
tifying different themes and aspects by utilizing affin-
ity diagrams (Beyer and Holtzblatt, 1997) as proposed
by Preece, Rogers and Sharp (Preece et al., 2015).
The qualitative observations and comments overall in-
dicate, that the low-cost video-texture avatars were
perceived as helpful and adequate to the purpose of
visually collaborating and solving spatial tasks. In
the open-ended questions the users were asked to de-
scribe what they liked/disliked in general, as well
as specifically about the avatar representation and
the communication and interaction with it. Partic-
ipants positively connoted the visual representation,
but mentioned some issues relating to technical con-
cerns which must be regarded in further implemen-
tations: Depending on the angle of view of the im-
mersed user towards the co-located person, parts of
the avatar were cut off. Especially when the avatar
tended to be placed in the outer peripheral regions
of the view, our approach is limited by the Kinect’s
specifics. Small outer regions cannot be covered
by the Kinect. Depth values are missing here due
to different aspect ratios of the BGRA (∼16:9) and
the depth sensor (∼64:53) as well as the Vive HMD
(∼9:10).
Furthermore, participants were asked about the
quality of non-verbal cues during the interview and
how they could interpret the co-located persons ac-
tions. Participants particularly suggested, that the vi-
sual cues of the video-texture avatars could be inter-
preted well. Gestures and facial expressions were un-
derstood especially at close distance, but decreasing
quality of the avatar texture at higher distance was
mentioned. This can be attributed to the fixed res-
olution of the Kinect, of which only one portion is
used for the avatar texture. Allover, participants men-
tioned the usefulness of the avatars, but mentioned
that the tracam-rig was quite uncomfortable for be-
ing mounted on the head. Unexpectedly, one partic-
ipant mentioned an issue relating to the lighting of
the avatar. In contrast to the virtually illuminated and
lighted objects within the VE, our 2D video-texture
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
214

avatar is highly affected by the lighting that is prevail-
ing in the real environment. These lighting conditions
differed during the study, so that one participant found
the avatar representations subjectively unnatural. The
description as eerie and non-attractive/-human indi-
cates a relation to an uncanny perception of the avatar
(uncanny valley, (Mori, 1970)) and must be regarded
in future approaches.
5 CONCLUSION AND FUTURE
WORK
In this paper, we proposed a novel approach for creat-
ing video-texture based realistic avatars of co-located
users and integrating them in immersive virtual envi-
ronments. Our approach is characterized by the fol-
lowing aspects:
• Low-cost hardware – We only rely on low-cost
hardware, like an HTC Vive, a Kinect and a do-it-
yourself tracam rig.
• No dependence on pre-trained computer vision –
Our approach does not harness any pre-trained
models for recognition or segmentation of the
video textures.
• No prior 3D scanning – Some approaches that
create and integrate realistic avatars, make highly
use of a priori actions, like 3D scanning. We have
shown how realistic avatars can be created and in-
tegrated entirely at runtime.
• No texture baking – We create personalized
avatars dynamically, so that the texture can be
changed during the use (e.g. changing appearance
of clothes during movement).
• View in-dependent rendering – Due to the tracam
unit, we are able to capture textures and render the
avatar representations with respect to the POV of
the immersed user. As a consequence, it can be
seen by the user intuitively from all perspectives.
• Focus on co-located people – Our approach makes
use of the physical closeness of co-located peo-
ple. They are captured by a camera and can move
freely within the room-scale area.
We have shown the technical details and discussed de-
sign challenges that arose during application of the
concept. The integration of video-textures as avatars
is covered, with emphasis on capturing and segment-
ing textures and arranging them within the 3D VE,
considering occlusion handling. The use of a BB,
whose location is defined by the head tracking in-
formation rather than just arbitrary depth threshold-
ing, is an addition that has the potential to help keep
the implementation robust when used in a crowded
space, but must be evaluated in future implementa-
tions. Furthermore, we evaluated the concept qualita-
tively in a user-study. This indicated issues and phe-
nomenons, which sincerely must be considered dur-
ing future work within the area of creating realistic
avatars.
Since our work lays the technical foundation, we
will focus on issues we pointed out, next. One as-
pect that we intentionally left out of regard in this
work is the synchronization. All producing sources
currently work on the same frames per second count
(30; except for the final VR rendering) We could al-
ready indicate within the user-study, that the delay be-
tween the avatar-motions and the remaining VE was
of neglectable matter for our users. Still, this aspect
provides space for further technical work. We con-
sider real-time streaming technology (e.g. real-time
streaming protocol (Schulzrinne, 1998)) as an appro-
priate methodology for MR media synchronization.
We believe that our approach constitutes an im-
portant stride towards low-cost avatar creation for im-
mersive VEs. We pursue the vision, that this will be-
come increasingly important, as VR technology al-
ready reached the consumer market, so that a future
application in social media and games is predictably
necessary.
ACKNOWLEDGEMENTS
The work is supported by the Federal Ministry of Ed-
ucation and Research of Germany in the project Hybr-
iT (Funding number:01IS16026A). The work further-
more is minor supported by the Federal Ministry of
Education and Research of Germany in the project In-
novative Hochschule (Funding number: 03IHS071).
REFERENCES
Alexiadis, D. S., Zarpalas, D., and Daras, P. (2013). Real-
time, realistic full-body 3d reconstruction and texture
mapping from multiple kinects. In IVMSP Workshop,
2013 IEEE 11th, pages 1–4. IEEE.
Azuma, R. T. (1997). A survey of augmented real-
ity. Presence: Teleoperators & Virtual Environments,
6(4):355–385.
Bailenson, J. N., Yee, N., Merget, D., and Schroeder, R.
(2006). The effect of behavioral realism and form re-
alism of real-time avatar faces on verbal disclosure,
nonverbal disclosure, emotion recognition, and cop-
resence in dyadic interaction. Presence: Teleopera-
tors and Virtual Environments, 15(4):359–372.
A Video-texture based Approach for Realistic Avatars of Co-located Users in Immersive Virtual Environments using Low-cost Hardware
215

Beck, S., Kunert, A., Kulik, A., and Froehlich, B. (2013).
Immersive group-to-group telepresence. IEEE Trans-
actions on Visualization and Computer Graphics,
19(4):616–625.
Beyer, H. and Holtzblatt, K. (1997). Contextual design:
defining customer-centered systems. Elsevier.
Fairchild, A. J., Campion, S. P., Garc
´
ıa, A. S., Wolff, R.,
Fernando, T., and Roberts, D. J. (2017). A mixed re-
ality telepresence system for collaborative space op-
eration. IEEE Trans. Circuits Syst. Video Techn.,
27(4):814–827.
Fischer, J., Bartz, D., and Straßer, W. (2004). Occlusion
handling for medical augmented reality using a vol-
umetric phantom model. In Proceedings of the ACM
symposium on Virtual reality software and technology,
pages 174–177. ACM.
Hebborn, A. K., H
¨
ohner, N., and M
¨
uller, S. (2017). Oc-
clusion matting: Realistic occlusion handling for aug-
mented reality applications. In Mixed and Augmented
Reality (ISMAR), 2017 IEEE International Sympo-
sium on, pages 62–71. IEEE.
Huang, Y. and Kallmann, M. (2009). Interactive demon-
stration of pointing gestures for virtual trainers. In
International Conference on Human-Computer Inter-
action, pages 178–187. Springer.
Kato, H. and Billinghurst, M. (1999). Marker tracking
and hmd calibration for a video-based augmented re-
ality conferencing system. In Augmented Reality,
1999.(IWAR’99) Proceedings. 2nd IEEE and ACM In-
ternational Workshop on, pages 85–94. IEEE.
Kiyokawa, K., Billinghurst, M., Campbell, B., and Woods,
E. (2003). An occlusion-capable optical see-through
head mount display for supporting co-located collabo-
ration. In Proceedings of the 2nd IEEE/ACM Interna-
tional Symposium on Mixed and Augmented Reality,
page 133. IEEE Computer Society.
Kotranza, A., Lok, B., Pugh, C. M., and Lind, D. S. (2009).
Virtual humans that touch back: enhancing nonverbal
communication with virtual humans through bidirec-
tional touch. In Virtual Reality Conference, 2009. VR
2009. IEEE, pages 175–178. IEEE.
Latoschik, M. E., Roth, D., Gall, D., Achenbach, J., Walte-
mate, T., and Botsch, M. (2017). The effect of avatar
realism in immersive social virtual realities. In Pro-
ceedings of the 23rd ACM Symposium on Virtual Re-
ality Software and Technology, page 39. ACM.
Lindlbauer, D. and Wilson, A. D. (2018). Remixed reality:
Manipulating space and time in augmented reality. In
Proceedings of the 2018 CHI Conference on Human
Factors in Computing Systems, page 129. ACM.
Lok, B., Chuah, J. H., Robb, A., Cordar, A., Lampotang,
S., Wendling, A., and White, C. (2014). Mixed-reality
humans for team training. IEEE Computer Graphics
and Applications, 34(3):72–75.
MacKenzie, I. S. (2012). Human-computer interaction: An
empirical research perspective. Newnes.
Maimone, A. and Fuchs, H. (2011). Encumbrance-free
telepresence system with real-time 3d capture and dis-
play using commodity depth cameras. In Mixed and
augmented reality (ISMAR), 2011 10th IEEE interna-
tional symposium on, pages 137–146. IEEE.
Milgram, P., Takemura, H., Utsumi, A., and Kishino, F.
(1995). Augmented reality: A class of displays on the
reality-virtuality continuum. In Telemanipulator and
telepresence technologies, volume 2351, pages 282–
293. International Society for Optics and Photonics.
Mori, M. (1970). The uncanny valley. Energy, 7(4):33–35.
Nordby, K., Gernez, E., and Børresen, S. (2016). Efficient
use of virtual and mixed reality in conceptual design
of maritime work places. In 15th International Con-
ference on Computer and IT Applications in the Mar-
itime Industries-COMPIT’16.
Preece, J., Rogers, Y., and Sharp, H. (2015). Interaction de-
sign: beyond human-computer interaction. John Wi-
ley & Sons.
Regenbrecht, H., Meng, K., Reepen, A., Beck, S., and Lan-
glotz, T. (2017). Mixed voxel reality: Presence and
embodiment in low fidelity, visually coherent, mixed
reality environments. In Mixed and Augmented Real-
ity (ISMAR), 2017 IEEE International Symposium on,
pages 90–99. IEEE.
Roth, D., Waldow, K., Stetter, F., Bente, G., Latoschik,
M. E., and Fuhrmann, A. (2016). Siamc: a socially
immersive avatar mediated communication platform.
In Proceedings of the 22nd ACM Conference on Vir-
tual Reality Software and Technology, pages 357–358.
ACM.
Schulzrinne, H. (1998). Real time streaming protocol (rtsp).
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finoc-
chio, M., Moore, R., Kipman, A., and Blake, A.
(2011). Real-time human pose recognition in parts
from single depth images. In Computer Vision and
Pattern Recognition (CVPR), 2011 IEEE Conference
on, pages 1297–1304. Ieee.
Suma, E. A., Krum, D. M., and Bolas, M. (2011). Sharing
space in mixed and virtual reality environments using
a low-cost depth sensor. In VR Innovation (ISVRI),
2011 IEEE International Symposium on, pages 349–
350. IEEE.
Waltemate, T., Gall, D., Roth, D., Botsch, M., and
Latoschik, M. E. (2018). The impact of avatar person-
alization and immersion on virtual body ownership,
presence, and emotional response. IEEE transactions
on visualization and computer graphics, 24(4):1643–
1652.
Walton, D. R. and Steed, A. (2017). Accurate real-time
occlusion for mixed reality. In Proceedings of the
23rd ACM Symposium on Virtual Reality Software and
Technology, page 11. ACM.
Yee, N. and Bailenson, J. (2007). The proteus effect: The
effect of transformed self-representation on behavior.
Human communication research, 33(3):271–290.
Zhu, Y., Zhu, K., Fu, Q., Chen, X., Gong, H., and Yu,
J. (2016). Save: shared augmented virtual environ-
ment for real-time mixed reality applications. In Pro-
ceedings of the 15th ACM SIGGRAPH Conference
on Virtual-Reality Continuum and Its Applications in
Industry-Volume 1, pages 13–21. ACM.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
216
