Top-Down Human Pose Estimation with
Depth Images and Domain Adaptation
Nelson Rodrigues
1,∗
, Helena Torres
1
, Bruno Oliveira
1
, Jo
˜
ao Borges
1
, Sandro Queir
´
os
1,2
,
Jos
´
e Mendes
1
, Jaime Fonseca
1
, Victor Coelho
3
and Jos
´
e Henrique Brito
2
,
1
Algoritmi Center, University of Minho, Guimar
˜
aes, Portugal
2
2Ai - Polytechnic Institute of C
´
avado and Ave, Barcelos, Portugal
3
Bosch, Braga, Portugal
Keywords:
Human Pose, Depth Images.
Abstract:
In this paper, a method for estimation of human pose is proposed, making use of ToF (Time of Flight) cameras.
For this, a YOLO based object detection method was used, to develop a top-down method. In the first stage, a
network was developed to detect people in the image. In the second stage, a network was developed to estimate
the joints of each person, using the image result from the first stage. We show that a deep learning network
trained from scratch with ToF images yields better results than taking a deep neural network pretrained on
RGB data and retraining it with ToF data. We also show that a top-down detector, with a person detector and
a joint detector works better than detecting the body joints over the entire image.
1 INTRODUCTION
The main motivation for this project was to develop
a system capable of monitoring passengers inside a
vehicle. With the evolution of autonomous vehicles,
the interaction that the humans will have in the car
will have a paradigm completely different from the
current one. With autonomous vehicles, the time that
was previously spent driving will be used for other
activities. Consequently, there is a need to monitor
and predict the actions of all passengers inside the
vehicle. For this purpose, it is necessary to detect hu-
mans and their respective body posture, namely the
spatial location of the skeletal joints. To capture qua-
lity images of the interior of the vehicle, ToF came-
ras can be used, as these have a great advantage over
RGB cameras, namely their immunity to light condi-
tions. With this type of images, it is possible, through
algorithms based on Deep Learning (DL), to estimate
the body posture of individuals. There are already
methods able to determine the human pose in both
RGB and depth images. In this article, a YOLO object
detection method was used, to develop a top-down
method.
In the first stage, a DL network was developed to
detect people in the image. In the second stage, a net-
work was developed to estimate the joints of each per-
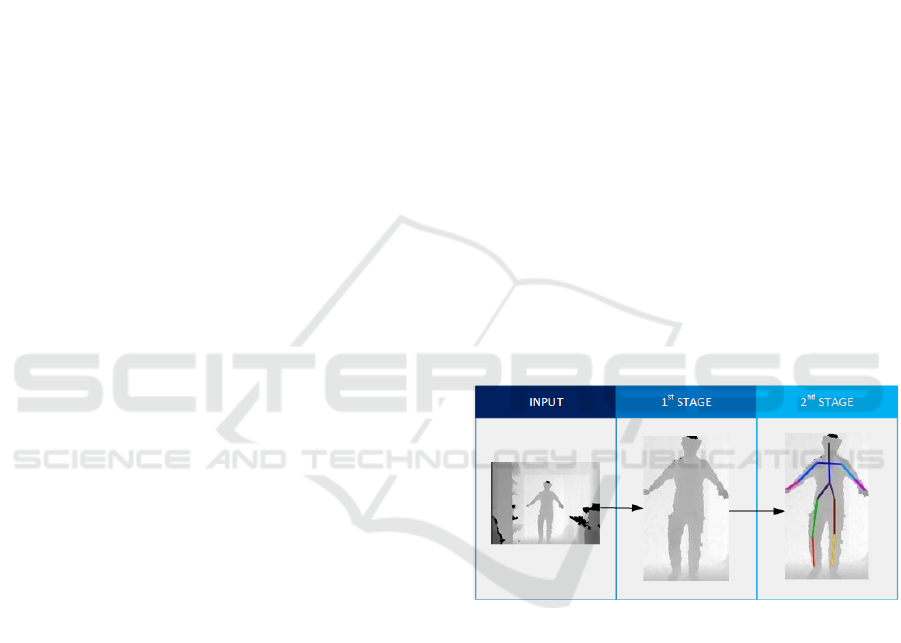
Figure 1: Overview of the proposed top-down YOLO met-
hod. The first stage uses a person detector to produce a
bounding box around each candidate person. In the second
stage, a pose estimator is applied to the image cropped ar-
round each candidate person in order to localize their skele-
ton’s joints.
son, using the image region of interest (RoI) detected
in the first stage. The rest of the paper is organized as
follows. Section 2 gives an introduction to the diffe-
rent existing human pose detection methods, as well
as some methods used in this article. The modificati-
ons made to the object detection method are described
in section 3. The results of these same detections are
shown in section 4. And finally, section 5 provides
the overall conclusions.
Rodrigues, N., Torres, H., Oliveira, B., Borges, J., Queirós, S., Mendes, J., Fonseca, J., Coelho, V. and Brito, J.
Top-Down Human Pose Estimation with Depth Images and Domain Adaptation.
DOI: 10.5220/0007344602810288
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 281-288
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
281

2 PREVIOUS WORK
Human pose estimation in 2D images is usually tre-
ated as an object detection task, where the objects to
be detected are the skeleton joints of the people ap-
pearing in the images.
Felzenszwalb et al. (2010) proposed an object de-
tection system that uses local appearances and spatial
relations to recognize generic objects of an image.
Generally, this method consists of defining a model
that represents the object. The model is constructed
by defining a root filter (for the object) and a set of
filters (for the parts of the object). These filters are
used to study the features of the image. More specifi-
cally, the characteristics of the oriented gradient his-
togram (HoG) are analyzed within each filter to repre-
sent an object category. The descriptor calculates the
gradients of a region of the image HoG, assuming the
object within the image can be described by its inten-
sity transitions. This method uses a sliding window
approach, where the filters are applied to all image
positions. For the creation of the final model, a dis-
criminative approach is used, where the model learns
from annotated data, using bounding boxes around
the object. This part is usually performed by an sup-
port vector machine (SVM). After the training phase,
the model is used to detect the objects in test images.
Detection is performed by computing the convolution
of the trained part models with the feature map of the
test image and selecting the regions of the image with
the highest convolution score. One can notice that this
method, despite having a discriminative basis, can be
interpreted as an adjustment of the image to a model,
which involves generative concepts. For this reason,
it can be considered a hybrid methodology, and may
thus not be trivial to adapt this method to depth ima-
ges.
The random tree walk (RTW) method presented
by Jung et al. (2015) estimates 3D joints from depth
images. This work is an evolution of an earlier met-
hod proposed by Shotton et al. (2013). The main dif-
ference is in the fact that it does not apply a pixel re-
gression for all the pixels in the image and trains a
tree to estimate the direction to a specific joint from a
random point instead of the distance. RTW only eva-
luates one pixel at each iteration. When it reaches a
leaf in the tree, it will choose a direction. The RTW
method will then iteratively converge to the desired
joint. This method is executed hierarchically, which
means the position resulting from a joint search will
be used as the starting point for the next joint to be
calculated.
Regarding DL approaches, Cao et al. (2017) pro-
posed a method that uses a VGG (Simonyan and Zis-
serman, 2015) network to extract features from the
image and these features are used as inputs for a CNN
with two branches. The first branch is trained and
used for joint detection and the second branch is trai-
ned with the segments between them, so it is able to
detect limbs connecting joints. In the first branch, a
feed-forward network is used to provides the confi-
dence maps of the different parts of the body corre-
sponding to their probability maps. These probability
maps are a representation of the confidence in each
position of the joint that occurs in each pixel and is ex-
pressed in a Gaussian function. In the second branch,
the part affinity vector fields are constructed, enco-
ding the association between the parts. The part affi-
nity fields allow joint’s positions to be assembled into
a body posture. A part affinity field is constructed
for each member of the body and encodes location
and orientation information. The predictions for joint
and limb detections produced by the two branches of
the network are refined over several stages through an
iterative process. The predictions of each branch are
used as the input of the next stage. This method is
designed to better handle images with more than one
person. For this reason, it is unnecessary to imple-
ment a method for detecting people, to later detect the
joints of each person, which allows to avoid bad de-
tections on the people detector and increases the com-
putation time. As major disadvantages, it requires sig-
nificant training data and requires the analysis of the
entire image.
The method presented by Papandreou et al. (2017)
consists of a two-stage approach. The first stage pre-
dicts the location and scale of bounding boxes contai-
ning people using a Faster R-CNN (Ren et al., 2017)
detector. Both the region proposal components and
the bounding box classification used in the Faster R-
CNN detector were trained using only the person ca-
tegory of the MS COCO (Lin et al., 2014) dataset,
with all other categories being ignored. In the se-
cond step, for each bounding box proposed in the first
step, the 17 key points of the person potentially con-
tained in the box are estimated. For better computa-
tional efficiency, the bounding box proposals of pe-
ople are only sent to the second stage if their score
is higher than a threshold (0.3). Using a fully convo-
lutional ResNet, the system predicts two targets, (1)
disk-shaped heatmaps around the key points and (2)
magnitude of the offset fields toward the precise posi-
tion within the disk. The system then aggregates these
results, producing the activation maps aggregating the
results in a weighted voting process, on highly locali-
zed activation maps.
The method presented by He et al. (2017), na-
med Mask R-CNN, is an extension of Faster R-CNN
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
282
that also outputs a segmentation mask, in addition to
the bounding box and class probabilities. Faster R-
CNN adopts a two-stage methodology: first, a region
proposal network (RPN) produces candidates regions,
and then a second stage extracts features for each can-
didate and outputs its class and bounding box offsets.
Mask R-CNN adds an additional branch to estimate
segmentation masks for each candidate region, in pa-
rallel to the branch that predicts the class and boun-
ding box offsets.
Like Faster-RCNN, the You Only Look Once
(YOLO) method presented by Redmon et al. (2016)
is an object detector. YOLO is faster because it re-
formulated the detection of objects as a single regres-
sion problem, directly from the pixels of the image to
the bounding box coordinates and the class probabi-
lities. A single convolution network simultaneously
provides several bounding boxes and their respective
classification probabilities. YOLO trains directly with
full images. This method can be adapted to follow the
same procedure as the Papandreou et al. (2017) met-
hod, but just using the object detections in both stages.
In general, DL-based systems for human pose de-
tection take in RBG images and are structured around
a DNN trained on a large RGB dataset with joint an-
notations, such as PASCAL VOC (Everingham et al.,
2005) or MS COCO. The most popular human pose
detection systems that use ToF images are usually
adaptations of the method from Shotton et al. (2013)
trained on ToF images also with joint annotations. In
our work, the challenge was to leverage DL-based sy-
stems, usually designed for RGB images, and to find
the best way to adapt them to the new domain provi-
ded by ToF cameras. We therefore used a deep lear-
ning based detector as a starting point and repurposed
it for human joint detection with ToF images, using
different strategies, to see what strategies produced
the best results. We evaluate our experiments on the
iTop dataset Haque et al. (2016), which includes ToF
frames and ground truth 2D locations of a 15 joint
skeleton.
3 IMPLEMENTATION
This work aims to estimate human pose (joint posi-
tions) from depth images. All implementations of
CNN-based detectors used the YOLOv3 (Redmon
and Farhadi, 2018) as a starting point. YOLO is a
DL object detector that outputs bounding box coor-
dinates. YOLOv3 has a hybrid architecture between
the YOLOv2 (Redmon and Farhadi, 2017) version
(darknet-19) and residual networks with several small
improvements. YOLOv3 is available with pre-trained
networks for different datasets, like PASCAL VOC
and MS COCO, which allows detecting people easily.
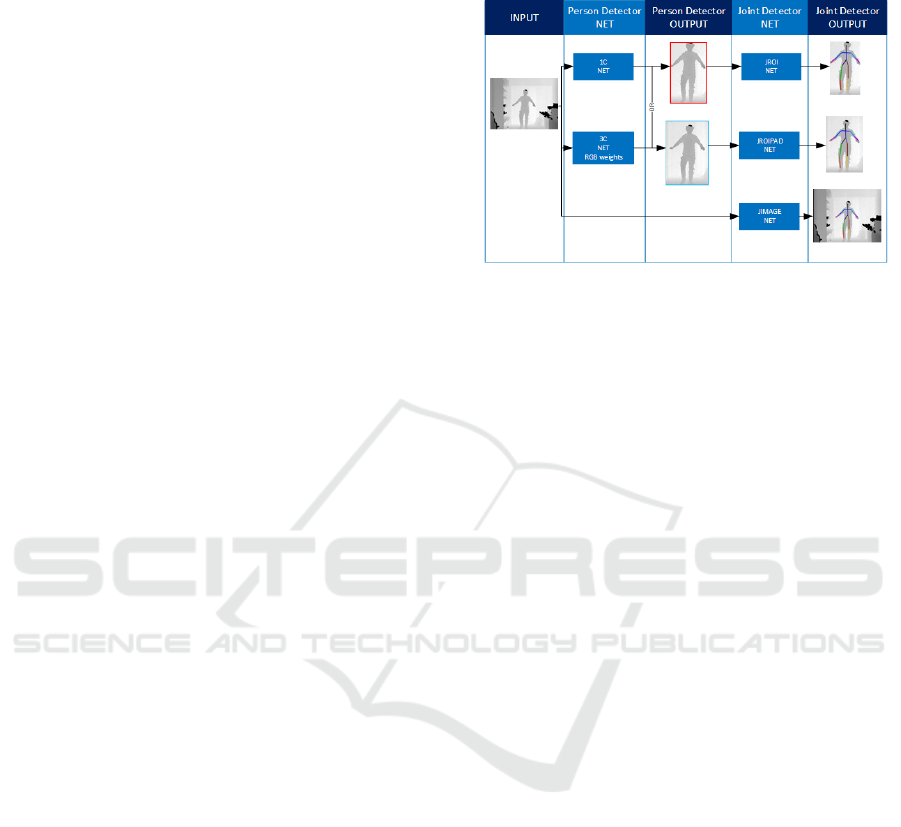
Figure 2: Implementations of all different networks for per-
son detector and joints detector.
All implemented detectors take 416x416 pixel in-
puts, as in the original implementation. Some of the
implemented networks were trained from pre-trained
weights for the convolutional layers (using the dar-
knet53.conv.74 weights as a starting point), while
some were trained from scratch: for detectors that use
3-channel inputs, training was initialized with the pre-
trained weights, while for detectors that use 1-channel
inputs, training was initialized with random weights.
We tried both approaches to verify if it would make
sense to leverage knowledge transfer across domains
(RGB to ToF) or if training from scratch in the new
domain worked better.
The person detector was implemented using the
original YOLOv3 implementation, simply by chan-
ging the number of classes to 1, the person class. For
the detection of joints, the network was adjusted for
the number of classes, so that it would detect the 15
classes corresponding to the 15-joint skeleton provi-
ded for each frame in the dataset. For the development
of the top-down human pose estimation detectors, as
shown in Figure 1, we simply concatenated a person
detector with a joint detector, to compose a two-stage
system. The first network was trained only to detect
people in the image, and the second network was trai-
ned with RoIs for joint detection. For the joint detec-
tors, we tried 3 different versions: joint detectors trai-
ned on person bounding boxes, trained on padded per-
son bounding boxes, and trained on the whole image
(without person detection).
3.1 Person Detector
These networks were trained only to detect persons in
the images, so there is only one class, person. We
tried using pre-trained weights (darknet53.conv.74)
with 3 channel images (simply feeding 3 channels
with the same depth information into the network)
Top-Down Human Pose Estimation with Depth Images and Domain Adaptation
283

Table 1: Parameters values for the person detector network.
Parameter Value
Classes 1
Coords 4
Number of Masks 3
Filters 18
and training the network from scratch for 1 channel
(depth). The RoIs defined by the bounding boxes pro-
duced by the person detector are then fed as input to
the second stage of the hierarchical pose detector. The
RoI can be used as is (red bounding box in Figure 2)
or with a 20-pixel padding (blue bounding box in Fi-
gure 2).
3.2 Person Pose Estimation
Table 2: Parameters values for the pose estimation network.
Parameter Value
Classes 15
Coords 4
Number of Masks 3
Filters 60
A separate network detects the position of the joints
inside a region. The input region may be the whole
image or a RoI provided by the person detector. We
use the joint structure provided by the iTOP dataset,
a skeleton with 15 joints. The 15 joints are the ob-
ject classes detected by the joint detectors. Joint de-
tection is formulated as an object detection problem
by defining bounding boxes around the ground truth
coordinates of each joint provided in the dataset. The
bounding boxes are all square in shape, but their size
depends on the type of joint. The bounding box sizes
for each joint class are presented in Table 3.
Table 3: Bounding box sizes for each joint.
Joint Size
head 35
neck 35
rShoulder 25
lShoulder 25
rElbow 25
lElbow 25
rHand 30
lHand 30
torso 15
rHip 30
lHip 30
rKnee 25
lKnee 25
rFoot 25
lFoot 25
Figure 3: A) Frame with zero padding arround the pose de-
tection, B) Frame with twenty pixels of padding arround the
pose detection.
At inference time, the detector outputs the center
of the bounding box as the estimated coordinates of
the joint.
Since the bounding box boundaries provided by
the person detector may be very close to the bounda-
ries of the silhouette, namely close to the hands, it is
difficult to train a method with good results for the
bounding boxes of the joints, since important context
information might be missed (Figure 3 left). If a 20-
pixel padding is added to the person bounding box,
the joint bounding boxes will contain more context
information, which will be extremely useful for trai-
ning the joint detector. On the other hand, training the
joint detector in the whole image will use all availa-
ble context information, but might be an unnecessary
waste of computational resources. For this reason, as
mentioned before, we trained 3 variants for the joint
detector: detecting the joints inside the person boun-
ding box, inside a padded person bounding box, and
in the whole image. As for the person detectors, the
3-channel version were trained from pretrained weig-
hts and 1-channel version were trained from random
initializations.
Figure 4: Position of each joint in the silhouette.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
284

4 EXPERIMENTAL EVALUATION
4.1 Experimental Setup
For the training of the method, a server with a NVI-
DIA Tesla V100 GPU with 16GB was used. All ex-
periments used a momentum of 0.9, a learning rate of
0.001, a batch size of 64 with 4 subdivisions which
means that in every step the network reads 16 images.
The methods for person detectors were trained for 5
000 iterations and the joints detection were trained for
10 000 iterations.
The iTOP dataset was used both for training and
testing. The dataset includes 22660 front view depth
images with joint annotations, which was split into
a training set with 17991 images and a test set with
4669 images. The original ground truth annotations
had to be corrected, as some joints were placed out-
side the human silhouette. In those situations, the
joint coordinates were moved so that they would be
placed on the edge of the silhouette. For this proce-
dure, a region growing method was used in order to
obtain the RoIs. The human silhouette was then iso-
lated by selecting the object that included the torso
joint. After having a segmented human silhouette, a
k nearest neighbours (KNN) algorithm was applied in
order to move the joints outside the silhouette onto the
edges of the silhouette (Figure 5).
4.2 Person Detections
To evaluate person detection, the classic metrics were
used, namely Intersection over Union (IoU) above
Figure 5: A) Annotations outsite the human silhouette, B)
Result of the region growing algorithm, C) Human silhou-
ette object selected, D) Applied KNN algorithm in order to
move the joints to the edge of the human silhouette.
some thresholds, Average Precision and Average Re-
call, Precision and Recall at 0.5, Precision and Re-
call at 0.75, following standard practice in object
detection challenges such as COCO. As mentioned
above, different person detectors were trained for
3-channel images and 1-channel images, using pre-
trained weights and from random initializations re-
spectively.
Results are shown in Figure 6 for AP, Figure 7
for AR and in supplemental material for P0.5, R0.5,
P0.75 and R0.75.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
1
5
10
20
30
40
50
AP (%)
Iterations (hundreds)
1C 3C
Figure 6: Average precision results over training iterations.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
1 5 10 20 30 40 50
AR (%)
Iterations (hundreds)
1C 3C
Figure 7: Average recall results over training iterations.
In the first few iterations, the pretrained RGB
weights seem to be able to encapsulate some infor-
mation about the behavior of depth images, and re-
training them on 3-channel ToF images yields better
results than random weights with trained on very little
1-channel ToF data. However, after a few hundred
training iterations, the more compact 1-channel repre-
sentation allows the 1-channel network to learn better
and faster from ToF images, although the difference
in performance is not very large, if enough training
iterations are allowed to be executed. We therefore
conclude that training a 1-channel detector from scra-
tch is better than retraining RGB weights, as the 1-
channel representation is a more compact represen-
Top-Down Human Pose Estimation with Depth Images and Domain Adaptation
285
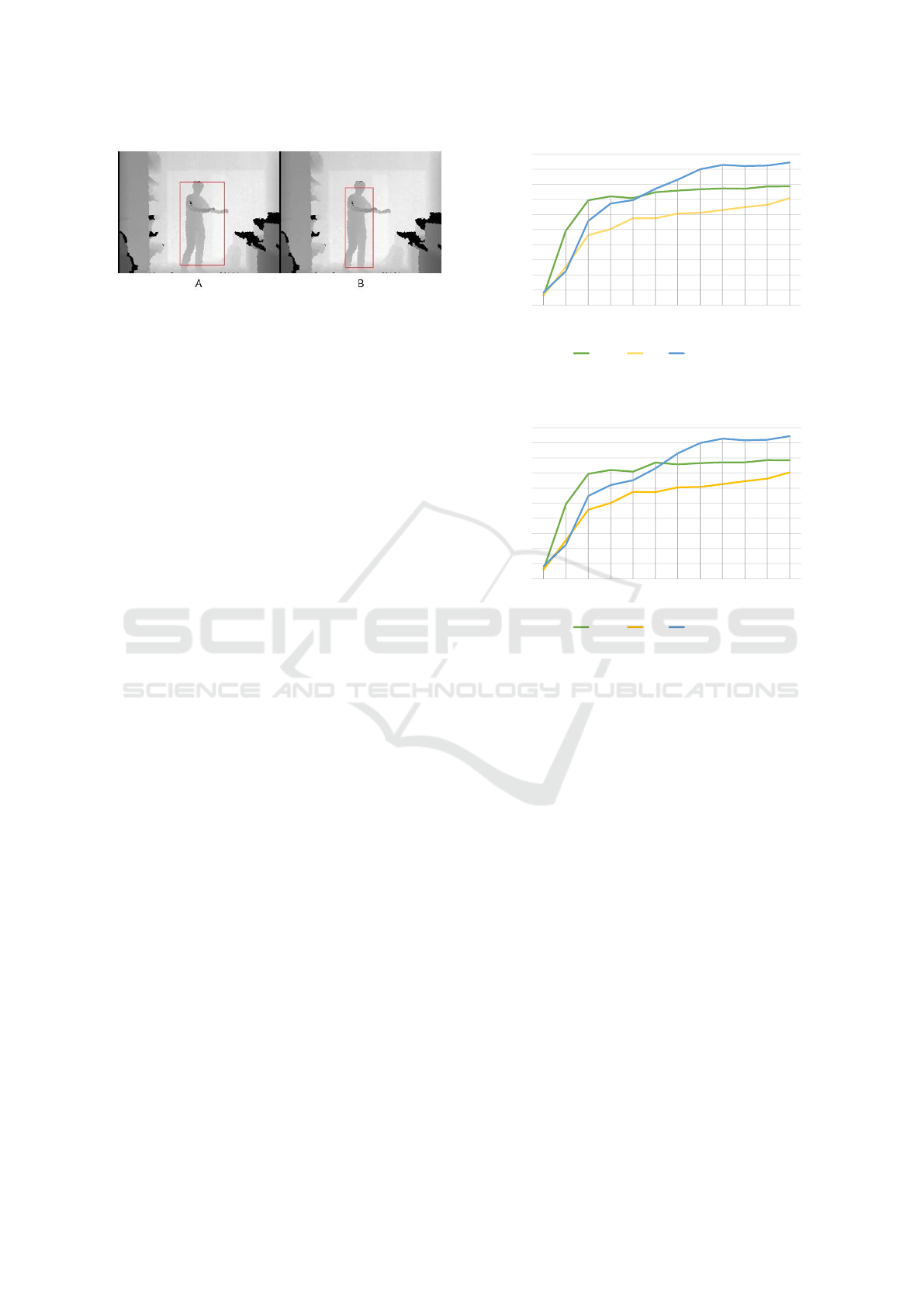
Figure 8: A) Person detection for one channel without pre-
trained weights, B) Person detection for three channels net-
work with pre-trained weights.
tation, from which a detector learns more efficiently
than from a 3-channel representation, where the same
information is repeated in the 3 channels.
4.3 Person Pose Estimations
Having determined that training with 1-channel ToF
images is more efficient for person detection, all pose
estimation detectors took 1-channel ToF images with
random initial weights for joint detection.
To evaluate pose estimation, the considered me-
trics were not based on IoU. Instead, we compute
Average (Euclidian) Distance (in cm) between the de-
tected joint coordinates and ground truth coordinates
(AvD), mean Precision and mean Recall of joint de-
tections considering detections within some threshold
distance (5 cm and 10 cm) as true positives (mP5cm,
mP10cm, mR5cm, mR10cm), and again Average Dis-
tance but considering only joints that were detected
within some threshold distance (5 cm and 10 cm)
(AvDT5cm, AvDT10cm). These metrics make more
sense than classic region-based object detection me-
trics, as the system is truly estimating point positions,
rather than object positions.
Figure 9 and Figure 10 show the results for
AP5cm and AR5cm respectively, and AP10cm,
AR10cm, AD, AD5cm, AD10cm are included in sup-
plemental materials. The results are shown for dif-
ferent topologies, considering joint detection on the
whole image, joint detection in padded RoIs and joint
detection for standard RoI, for different numbers of
training iterations, and using 3-channel data.
Overall, the topology that yielded the best results
was the one where the joint detector uses standard
padded ROI as input. The results using the whole
image are also similar but not quite as good as using
just the padded ROI. Results for joint detection using
the standard ROI are significantly worse. When the
whole image is used for joint detection, the network is
more prone to make mistakes in joint detection. If the
network is progressively fed with inputs that are more
constrained to the true position of the joints, the per-
formance also progressively increases, so feeding the
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
20.00
1 5 10 20 30 40 50 60 70 80 90 100
AP5cm (%)
Iterations (hundreds)
JIMAGE JROI JROIPAD
Figure 9: Average precision for a threshold of 5 cm over
training iterations.
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
20.00
1 5 10 20 30 40 50 60 70 80 90 100
AR5cm (%)
Iterations (hundreds)
JIMAGE JROI JROIPAD
Figure 10: Average recall for a threshold of 5 cm over trai-
ning iterations.
standard padded ROI gives the best result. We origi-
nally anticipated that using padded ROIs would yield
better results than using standard ROIs, as the de-
tection of joints that are closer to the edge of the ROI
would benefit from having more visual context availa-
ble for those detections. Indeed, the results achieved
with padded ROI were much higher than the standard.
5 CONCLUSION
In this work, we have shown how to repurpose a deep
learning object detector, originally trained with RGB
images, for a different task using ToF images. We
have shown that it is preferable to train the whole
network from scratch with ToF images, rather than
take trained RGB weights and retrain them with ToF
images. We have also shown that a top-down hierar-
chical detector works better than just using the joint
detector on the entire image, as the person detector
constrains the search for the joint detector, enabling
it to make less mistakes during joint detection. Ho-
wever, constraining the search to ROIs hampers the
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
286
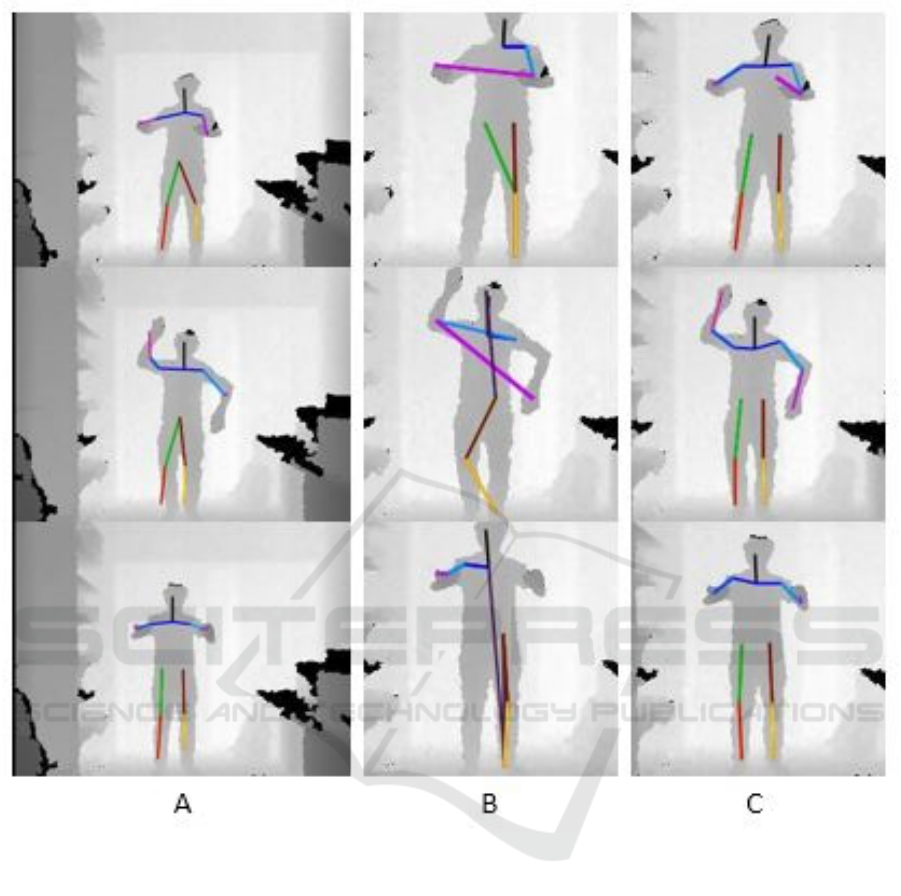
Figure 11: Pose estimations results for the differents networks: A) JImage, B) JRoI, C) JRoIPad.
body joint detector for joints that are close to the ROI
boundary, as less visual context information is availa-
ble for those joints. Detecting joints on padded ROIs
did in fact significantly change the results, and ena-
bled the system to be more effective for joints near
the ROI boundary.
For future work, we plan to try the same appro-
ach using other deep learning based detectors, pos-
sibly combining the YOLO based ToF person detec-
tor with a different joint detector, such as Cao et al.
(2017) also trained from scratch with random weig-
hts with ToF images. To be able to address the in-car
scenario, which is our ultimate goal, we are currently
developing a dataset with in-car images in order to
apply this solution in this type of images.
ACKNOWLEDGEMENTS
This work is supported by: European Structural
and Investment Funds in the FEDER component,
through the Operational Competitiveness and Inter-
nationalization Programme (COMPETE 2020) [Pro-
ject no 002797; Funding Reference: POCI-01-0247-
FEDER-002797].
REFERENCES
Cao, Z., Simon, T., Wei, S. E., and Sheikh, Y. (2017). Real-
time multi-person 2D pose estimation using part af-
finity fields. Proceedings - 30th IEEE Conference
Top-Down Human Pose Estimation with Depth Images and Domain Adaptation
287
on Computer Vision and Pattern Recognition, CVPR
2017, 2017-Janua:1302–1310.
Everingham, M., Zisserman, A., Williams, C. K. I., Van
Gool, L., and Al., A. (2005). The 2005 PASCAL
Visual Object Classes Challenge. First PASCAL Ma-
chine Learning Challenges Workshop, MLCW 2005,
3944:117–176.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object Detection with Discrimi-
native Trained Part Based Models. IEEE Transacti-
ons on Pattern Analysis and Machine Intelligence,
32(9):1627–1645.
Haque, A., Peng, B., Luo, Z., Alahi, A., Yeung, S., and
Fei-Fei, L. (2016). Towards Viewpoint Invariant 3D
Human Pose Estimation. In ECCV, pages 160–177.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask R-CNN. Proceedings of the IEEE International
Conference on Computer Vision, 2017-Octob:2980–
2988.
Jung, H. Y., Lee, S., Heo, Y. S., and Yun, I. D. (2015).
Random tree walk toward instantaneous 3D human
pose estimation. In Proceedings of the IEEE Compu-
ter Society Conference on Computer Vision and Pat-
tern Recognition, volume 07-12-June, pages 2467–
2474.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. Lecture
Notes in Computer Science (including subseries Lec-
ture Notes in Artificial Intelligence and Lecture Notes
in Bioinformatics), 8693 LNCS(PART 5):740–755.
Papandreou, G., Zhu, T., Kanazawa, N., Toshev, A., Tomp-
son, J., Bregler, C., and Murphy, K. (2017). To-
wards accurate multi-person pose estimation in the
wild. Proceedings - 30th IEEE Conference on Com-
puter Vision and Pattern Recognition, CVPR 2017,
2017-Janua:3711–3719.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). YOLO You Only Look Once: Unified, Real-
Time Object Detection. Cvpr 2016, pages 779–788.
Redmon, J. and Farhadi, A. (2017). YOLO9000: Better,
faster, stronger. Proceedings - 30th IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2017, 2017-Janua:6517–6525.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement.
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with Re-
gion Proposal Networks. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 39(6):1137–
1149.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2013).
Real-time human pose recognition in parts from single
depth images. Studies in Computational Intelligence,
411:119–135.
Simonyan, K. and Zisserman, A. (2015). VGG : Very Deep
Convolutional Networks for Large-Scale Image Re-
cognition. International Conference on Learning Re-
presentations (ICRL), pages 1–14.
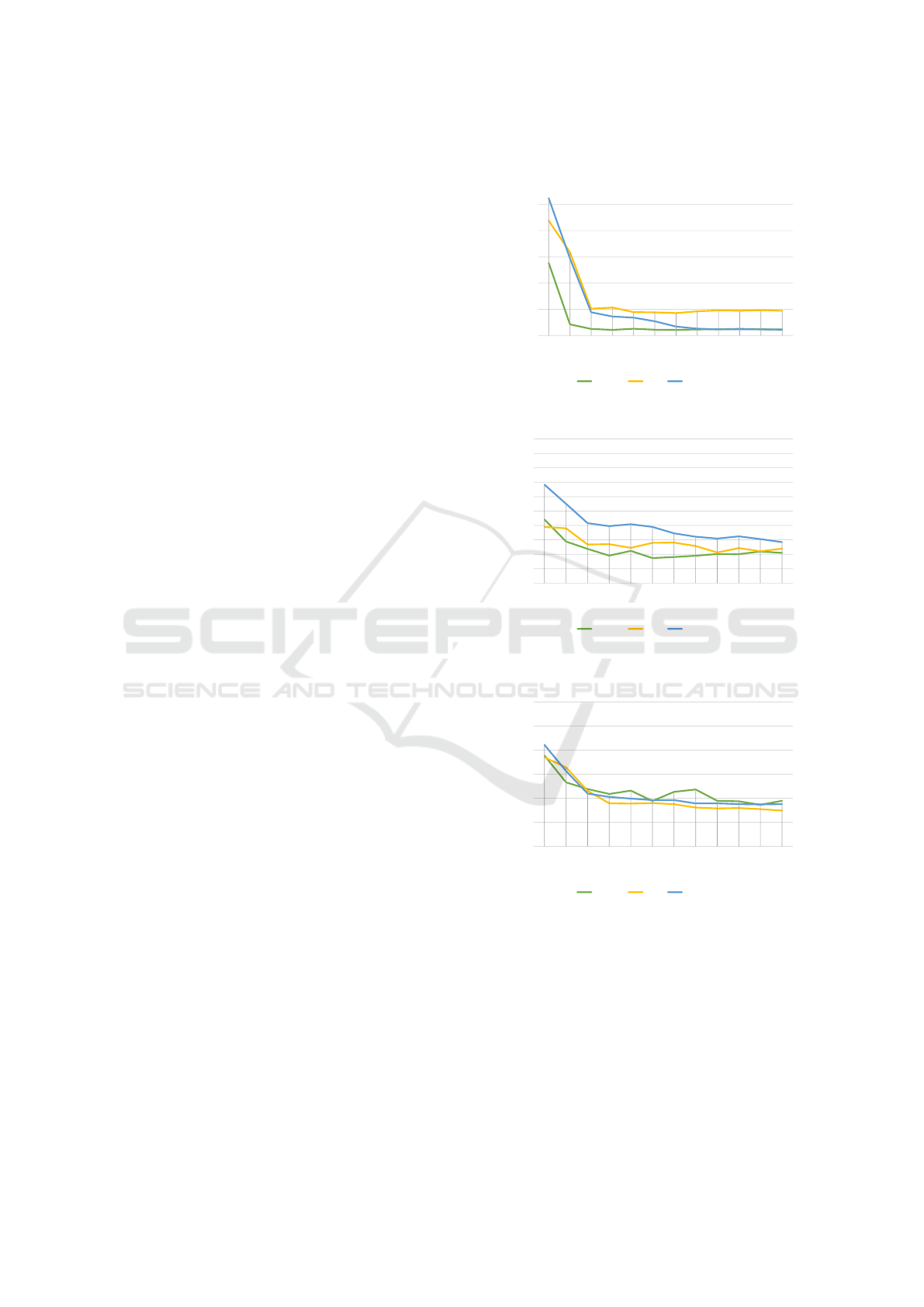
APPENDIX
15.00
25.00
35.00
45.00
55.00
65.00
1 5 10 20 30 40 50 60 70 80 90 100
AD (cm)
Iterations (hundreds)
JIMAGE JROI JROIPAD
Figure 12: Average distance over the training iterations.
3.00
3.10
3.20
3.30
3.40
3.50
3.60
3.70
3.80
3.90
4.00
1 5 10 20 30 40 50 60 70 80 90 100
ADT5cm (cm)
Iterations (hundreds)
JIMAGE JROI JROIPAD
Figure 13: Average distance for a threshold of 5 cm for the
joints correctly detected over the training iterations.
5.00
5.50
6.00
6.50
7.00
7.50
8.00
1 5 10 20 30 40 50 60 70 80 90 100
ADT10cm (cm)
Iterations (hundreds)
JIMAGE JROI JROIPAD
Figure 14: Average distance for a threshold of 10 cm for the
joints correctly detected over the training iterations.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
288
