
Using LSTM for Automatic Classification of
Human Motion Capture Data
Rog
´
erio E. da Silva
1,2
, Jan Ond
ˇ
rej
1,3
and Aljosa Smolic
1
1
V-SENSE, School of Computer Science and Statistics, Trinity College Dublin, Ireland
2
Department of Computer Science, Santa Catarina State University, Brazil
3
Volograms, Dublin, Ireland
Keywords:
Human Motion Classification, Motion Capture, Content Analysis, Deep Learning, Artificial Intelligence.
Abstract:
Creative studios tend to produce an overwhelming amount of content everyday and being able to manage these
data and reuse it in new productions represent a way for reducing costs and increasing productivity and profit.
This work is part of a project aiming to develop reusable assets in creative productions. This paper describes
our first attempt using deep learning to classify human motion from motion capture files. It relies on a long
short-term memory network (LSTM) trained to recognize action on a simplified ontology of basic actions like
walking, running or jumping. Our solution was able of recognizing several actions with an accuracy over 95%
in the best cases.
1 INTRODUCTION
Creative industry is a broad term generally used to
refer to any company devoted to create content for
games, animations, AR/VR, VFX, etc. Over time,
the amount of creative content that can be produced
by these companies can easily become overwhelming;
how big? it will depend on the size of the company
itself. Studios often rely on their own production pi-
peline to reduce time and effort spent producing new
content, therefore reducing their production costs in
order to increase profit. One effective way of redu-
cing costs is by reusing content from older producti-
ons, adapting them into new contexts, thus speeding
up the production. Despite that this notion sounds re-
asonable, achieving it in a production setting is not
easy, because, as mentioned before, being able to re-
trieve the one specific desired content among the mil-
lions of “assets” being produced every year (e.g. 3D
models, textures, sound effects, soundtracks, animati-
ons, scripts, etc.) has proven to be a high demanding
task.
One particular asset that has great interest for the
creative industry is motion captured data (mocap)
(Menache, 2011; Delbridge, 2015). Consider the fol-
lowing scenario: an animator needs to animate a se-
quence where a character walks limping from its left
leg due to an injury; instead of having the motion cap-
ture team recording a new sequence in the mocap lab,
the animator remembers that a few years back he al-
ready animated a similar sequence of a limping walk
which means he could adapt this sequence from that
old one (if he manages to remember which file con-
tains that desired animation). So, he makes a quick
search in the backup databases only to learn that the
studio has, in fact, thousands of motion captured fi-
les in storage! Now, how to find the one he’s look-
ing for? Re-recording the sequence in the mocap lab.
might be, in this case, a faster alternative to pursue
(although not cheaper).
This hypothetical situation is frequently observed
in a production pipeline, and finding ways to au-
tomatize the process for documenting creative con-
tents being produced (so to facilitate content retrie-
val) would have a big impact in reducing time and ef-
fort a production team would have to spend searching
through a database of older projects.
This work focuses on studying ways for automati-
zing the motion capture tagging process. To tag a con-
tent means to label it according to a given ontology, so
that later it could more easily be found by tag-based
searches, thus facilitating its retrieval and use. Our
approach relies on deep learning and long short-term
memory neural networks (LSTM) to analyze a se-
ries of mocap data files, classifying them accordingly.
This work is being developed under the context of the
SAUCE project (Smart Assets for re-Use in Creative
Environments) that is a three-year EU Research and
236
E. da Silva, R., Ond
ˇ
rej, J. and Smolic, A.
Using LSTM for Automatic Classification of Human Motion Capture Data.
DOI: 10.5220/0007349902360243
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 236-243
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Innovation project between several companies and re-
search institutions to create a step-change in allowing
creative industry companies to re-use existing digital
assets for future productions.
The goal of SAUCE project is to produce, pilot
and demonstrate a set of professional tools and techni-
ques that reduce the costs for the production of en-
hanced digital content for the creative industries by
increasing the potential for re-purposing and re-use
of content as well as providing significantly improved
technologies for digital content production and mana-
gement (SAUCE Project, 2018).
In this work, we studied ways for using long short-
term memory networks to automatically classify con-
tent from motion captured data according to a given
ontology. We have designed a LSTM architecture
that accepts motion captured data and determines the
actions being portrayed in each file. This work re-
presents a first step for SAUCE project in developing
a general-purpose media classifier system that could
help speeding up a creative pipeline process.
In the next section we discuss the problem of hu-
man motion classification then, on Section 3 a brief
literature review on motion capture, long short-term
memory neural networks (LSTM) and a few rela-
ted works are presented and discussed. Following,
Section 4 explains our experiments and results we
obtained from applying our method. Finally, we pre-
sent our conclusions and final remarks in Section 5.
2 HUMAN MOTION
CLASSIFICATION PROBLEM
Classifying motion means determining what kind of
action (e.g. walking, running, jumping, fighting, dan-
cing, etc.) is being portrayed by any given human
motion in space. Tracking motion in space is usually
achieved by motion capture that involves decompo-
sing each motion as a series of three-dimensional po-
ses (called a skeleton) in time (see Section 3.1).
Therefore, being able to understand motion means
determining temporal relations among changes occur-
ring to specific body parts over time while performing
each given movement. In this work, we are interested
in studying ways for automatic labelling a series of
motion captured data to facilitate its reuse in future
productions by a creative studio.
According to (Martinez et al., 2017), “learning
statistical models of human motion is a difficult task
due to the high-dimensionality, non-linear dynamics
and stochastic nature of human movement”. Clas-
sifying data involves analyzing each candidate ex-
tracting a series of properties from it trying to match
them to a specific class in a set of known classes (an
ontology). Several issues need to be tackled while
working on this kind of problem:
1. finding a suitable ontology description that is an
enumeration of possible classes and their attribu-
tes (the criteria used to identify an element of that
class);
2. an adequate knowledge representation on how
to represent ontological attributes in a way that ar-
tificial intelligence can work with;
3. a prediction criteria to describe how to deter-
mine if a given candidate belongs to a certain
class.
In the following sections we describe how to
track and represent spatial motion of humans, how
long short-term memory networks work and why we
choose to use them in this research and finally, a
few related works aiming human motion classifica-
tion problem are presented.
3 STATE OF THE ART
3.1 Motion Capture
Motion capture (or mocap) is the process of recor-
ding the movements of objects or people via special
hardware setups . There are several possible technolo-
gies that can be applied to capture movement in space:
Optical Systems: utilize data captured from image
sensors to triangulate the 3D position of a subject
between two or more cameras calibrated to pro-
vide overlapping projections. This can be achie-
ved using special markers that can be passive (re-
flective) or active (synchronized flashing LEDs);
they can also use markerless tracking systems
that relies on computer vision to recognize human
parts from the set of cameras;
Non-optical Systems: any other technology that al-
lows motion tracking. The most common ones
are: inertial systems use inertial measurement
units (IMUs) containing a combination of gy-
roscopes, magnetometers, and accelerometers, to
measure rotational rates; mechanical motion are
often referred to as exoskeleton motion capture
systems, due to the way the sensors are (directly)
attached to the body to perform the tracking; and
magnetic systems calculate position and orienta-
tion by the relative magnetic flux of three orthogo-
nal coils on both the transmitter and each receiver.
Using LSTM for Automatic Classification of Human Motion Capture Data
237

One approach that is very popular these days and
is traditionally employed by animation studios invol-
ves an actor wearing a suit covered with optical mar-
kers that can then be tracked by an optical system of
infrared cameras.
From these recordings results a series of 3D coor-
dinates for each marker (tracked several times per se-
cond) that can later be mapped to a character as an
animation (this technique is called retargeting). Fi-
gure 1 shows a few frames of a skeletal animation
obtained via a motion capture session of a walk (CMU
Graphics Lab, 2018).
Figure 1: Motion captured sequence of a walk.
Regarding file formats for storing motion capture
data one popular choice is the BVH format. The Bi-
ovision Hierarchical data (BVH) file format was ori-
ginally developed by Biovision (a motion capture ser-
vice company) to distribute mocap data to their cu-
stomers. Later, it became a very popular format for
storing mocap.
The reason why we decided to adopt this format
is because while other motion capture formats, like
the C3D format (https://www.c3d.org/), store only the
coordinates for each tracked markers (Figure 2 on
the left), the BVH format also represents hierarchical
relations between joints, i.e., their physical relations
called a skeleton (Figure 3), making it simpler to cor-
relate movements between adjoined joints (Figure 2
on the right).
Figure 2: C3D markers vs BVH Skeleton.
Motion capture data is recorded as a series of mo-
tion channels, each representing one spatial location
and/or orientation of a joint. Since the amount of
channels is dependent on the number of joints and the
number of degrees of freedom (DOF) of each joint,
the size of the frame can vary from file to file.
3.2 Long Short-Term Memory Neural
Networks
The Long Short-Term Memory (LSTM) network is a
type of Recurrent Neural Network (RNN), which is a
Figure 3: Example of a skeleton and motion channels defi-
nition in a BVH file.
special type of neural network designed for sequence
problems like, for instance, texts, speech, and anima-
tions. Traditional RNNs contain cycles that feed the
network activation from a previous time step as inputs
to influence predictions at the current one (Brownlee,
2018; Hochreiter and Schmidhuber, 1997).
Despite the fact that RNNs can learn temporal re-
lations, their main limitation is regarding training in
a problem known as the “vanishing gradient”. This
problem happens when, during training of a recurrent
process, the weights change become so small that they
have no effect in learning the data (or so large in the
other way around: “exploding gradient”).
LSTMs solve these problems by design. All infor-
mation being propagated through the network should
pass first by three gates. These gates are activation
functions especially designed to work on the data so
to only allow relevant information to continue being
propagated during training. The three gates are:
Forget Gate: decides what information to discard
from each layer;
Input Gate: decides which values from the input to
update the memory;
Output Gate: decides what to output based on the
input and the memory.
In the literature, several variants of this architec-
ture can be found where the number of gates can vary
to suit specific contexts and needs .
3.3 Related Works
Two distinct classes of works involving automatic re-
cognition of the human skeleton, can be found in the
literature: human pose estimation and human action
classification. We argue that, despite the clear simila-
rities between the two in terms of their goals (i.e. the
recognition of human motion), they significantly dif-
fer in most of the technical aspects involved in how to
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
238

tackle with the problem, namely, data representation
and processing:
Human Pose Estimation: aims at detect and esti-
mate human poses in video format (resulting from
actual recordings of people or graphical renditions
of 3D motion capture data), then extracting skele-
tal information that can include depth estimation
(3D) or not (2D). The most common approach
used in this context involves analyzing the pixels
of each frame of a video using classical computer
vision techniques.
Just to mention a few examples of works that
adopt this approach: (Du et al., 2016; Tekin et al.,
2016; Toshev and Szegedy, 2014).
Human Action Classification: aims at interpreting
3D motion from skeletal data analysis of actual
spatial recordings (as described in Section 3.1).
In this particular sense, not many works have been
found in the literature. Some examples that have,
somehow, influenced our work are:
• In (B
¨
utepage et al., 2017) the authors trained
a LSTM to predict future 3D poses from the
most recent past. The system is described as an
encoder-decoder network for generative 3D mo-
dels of human motion based on skeletal anima-
tion;
• In (Gupta et al., 2014) the authors propose an
approach to directly interpret mocap data via v-
trajectories that are sequences of joints connected
over a time frame to allow finding similar mocap
sequences based on pose and viewpoint;
• Another example of human motion prediction
using deep learning LSTMs is presented in (Mar-
tinez et al., 2017);
• A slightly different application but still related
to human motion prediction is the multi-people
tracking system presented by (Fabbri et al., 2018),
where the authors developed a system capable of
extracting information of people body parts and
temporal relations regarding the subjects’ moti-
ons. In this work, the system automatically de-
tects each human figure and respective skeletal in-
formation from frames of video recordings, even
if partially occluded, by matching those with a da-
tabase of body poses.
The common point between all the related works
presented here is that, despite the fact they studied
automatic approaches to identify human motion from
motion capture data, none of them focused on label-
ling the data in order to facilitate future queries and
content retrieval, which seems to remain an unsolved
problem.
4 EXPERIMENTATION
In this section its described the experiments made
with LSTM networks implemented using Python
and Keras (https://keras.io/) with Tensorflow (https:
//www.tensorflow.org/) using the aforementioned data
set built upon the CMU Motion Capture Library.
4.1 Ontology of Human Actions
Since the scope of this work focuses only on tagging
motion capture actions, instead of designing a com-
plete ontology for every possible creative media an
animation studio would be interested in cataloging,
we opted to simplify the representation to consider
only a selected set of human actions.
We are using the freely available CMU Motion
Capture library (CMU Graphics Lab, 2018) for our
experiments. Thus, the list of actions our system is
able to classify reflects the actions available in this
database.
In our experiments we considered the follo-
wing actions: bending down, climbing, dancing,
fighting, jumping, running, sitting down,
standing up, and walking.
The definition of this ontology is important be-
cause training the neural network to recognize its clas-
ses means that it needs a carefully designed data set
of mocap files for each class. Our training data set is
composed of 1136 files divided into those 9 catego-
ries, representing more than 820,000 frame samples.
4.2 Data Representation
There are two main concerns in terms of representing
data for a neural network: how to represent the input
(or training) data and how to represent the output (in
our case the labels of each class in the ontology).
For the input, we followed the data representation
presented at (B
¨
utepage et al., 2017), where each
frame of a mocap recording is represented in the
Cartesian space of each joint’s rotational data plus
the positional data for the ‘Hips’, thus resulting in
an 1D-array of size 3 × N
joints
+ 3 where N
joints
is the number of joints. Still agreeing with the
authors, we normalized all joint’s rotational angles,
centering the skeleton at the origin. So, each joint
data is represented according to the following for-
mat: <Joint> ZRotation, <Joint> YRotation,
<Joint> XRotation, e.g. LeftUpLeg Zrotation,
LeftUpLeg Yrotation, LeftUpLeg Xrotation.
Except for the Hips that also include the XYZ
positional values.
Using LSTM for Automatic Classification of Human Motion Capture Data
239

Several tests have been performed with the size of
the sample, i.e. the number of frames (N
f rames
), and a
comparative of the results is presented in Section 4.5
below.
Regarding the output, each possible outcome is re-
presented as a classical ‘one-hot’ binary string, where
the number of bits relates to the size of the ontology
(number of classes) and each label having a different
bit highlighted. For instance, since we have 9 diffe-
rent labels in the ontology, the first label “bending
down” is represented by the sequence 100000000.
These representations also influence the size of
the first and last layers of the network as described
in Section 4.4.
4.3 Class Prediction
Since we opted to split the training samples into sub-
sets of N
f rames
frames, we had to do the same with our
working data set for consistency. Thus, each motion
capture file being analyzed is also split into samples
of the same size, and each sample is then submit to the
network for prediction. As a sample can be matched
with different classes, in the end the resulting class is
obtained by taking the mode of the class prediction
array, i.e., considering the most frequent label as the
answer .
This approach has the advantage of classifying
each file in terms of how likely that file belongs to
a given class of the ontology, thus allowing for mul-
tiple interpretations of its content, much like how it
would happen in a real scenario. Consider a recor-
ding where the actor starts running in preparation for
a jump. Imagine now an animator searching for either
‘run cycles’ or ‘types of jump’, the system should be
able to understand that the particular file would be a
suitable response in either case.
4.4 Implementing a LSTM
As mentioned before, we opted to implement the pro-
totype for our tool in Python using Keras with Ten-
sorflow. The main reason for this choice was due to
the simplicity that these tools offer, making it more
adequate for quick prototyping.
The solution that was used for the experiments
discussed in this paper rely on three layers : the first
one (the input layer) is a LSTM layer of 15 neurons.
This value was chosen arbitrarily based on several
tests and can be modified to fit different needs like for
instance, different skeletal structures or computatio-
nal performance, the second layer is a similar LSTM
layer (stacked LSTM layer) with the sole purpose of
increasing depth of the network (our experiments sho-
wed that deeper networks can perform better while
predicting lengthier animations), and finally, the third
layer (the output) is the one responsible for encoding
the predicted outcome to one of the classes in the on-
tology as described in previous sections.
It is important to notice that although the size of
the input layer does not necessarily need to match the
size of the input data, the output layer does need to
match the size of the output, i.e., the number of pos-
sible labels that can be outputted.
Listing 1: LSTM implementation in Keras.
1 nNe u r ons = 15
2 numLabe l s = 9
3 s a m p l e S i z e = 5
4 d s S i z e = l e n ( t r a i n i n g D a t a S e t )
5 n J o i n t s = 38
6 d s S h a p e = ( sa m p l e S i z e , n J o i n t s ∗ 3 )
7
8 model = S e q u e n t i a l ( )
9 model . a d d ( LSTM( nNeurons , r e t u r n s e q u e n c e s = True ,
10 i n p u t s h a p e = d sS h a p e ) )
11 model . a d d ( LSTM( n N e uro n s ) )
12 model . a d d ( Dense ( numLabels , a c t i v a t i o n = ’ s o f t m a x ’ ) )
13 model . c o m p i l e ( l o s s = ’ mse ’ , o p t i m i z e r = Adam( l r = 0 . 0 0 1 ) ,
14 m e t r i c s = [ ’ a c c u r a c y ’ ] )
15 model . summary ( )
4.5 Preliminary Results
Several experimental tests have been performed with
our tool covering different network architectures and
several subsets of the ontology. In our experiments,
as a way to better assess the accuracy of the model.
We prepared a series of motion capture files carefully
editing their content to portray only a single action per
file.
In this section, we describe three of such experi-
ments:
1. We performed a series of 5 predictions with the
model considering all 9 categories. Our prediction
data set in this case was composed by 54 files (6
for each category);
2. Later, a subset containing only the four larger
classes data sets have been considered for a se-
cond round of predictions, and the results are pre-
sented next in Section 4.5.2;
3. Finally, the previous experiments’ results showed
that the despite the differences in size of the trai-
ning data sets, four specific classes appeared to
have been better modeled by the network, so we
decided to performed a third round of predictions
using only these four ones. The results for these
are presented in Section 4.5.3.
4.5.1 Experiment # 1
Table 1 summarizes the results obtained from these
predictions for the first trial. It’s important to notice
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
240
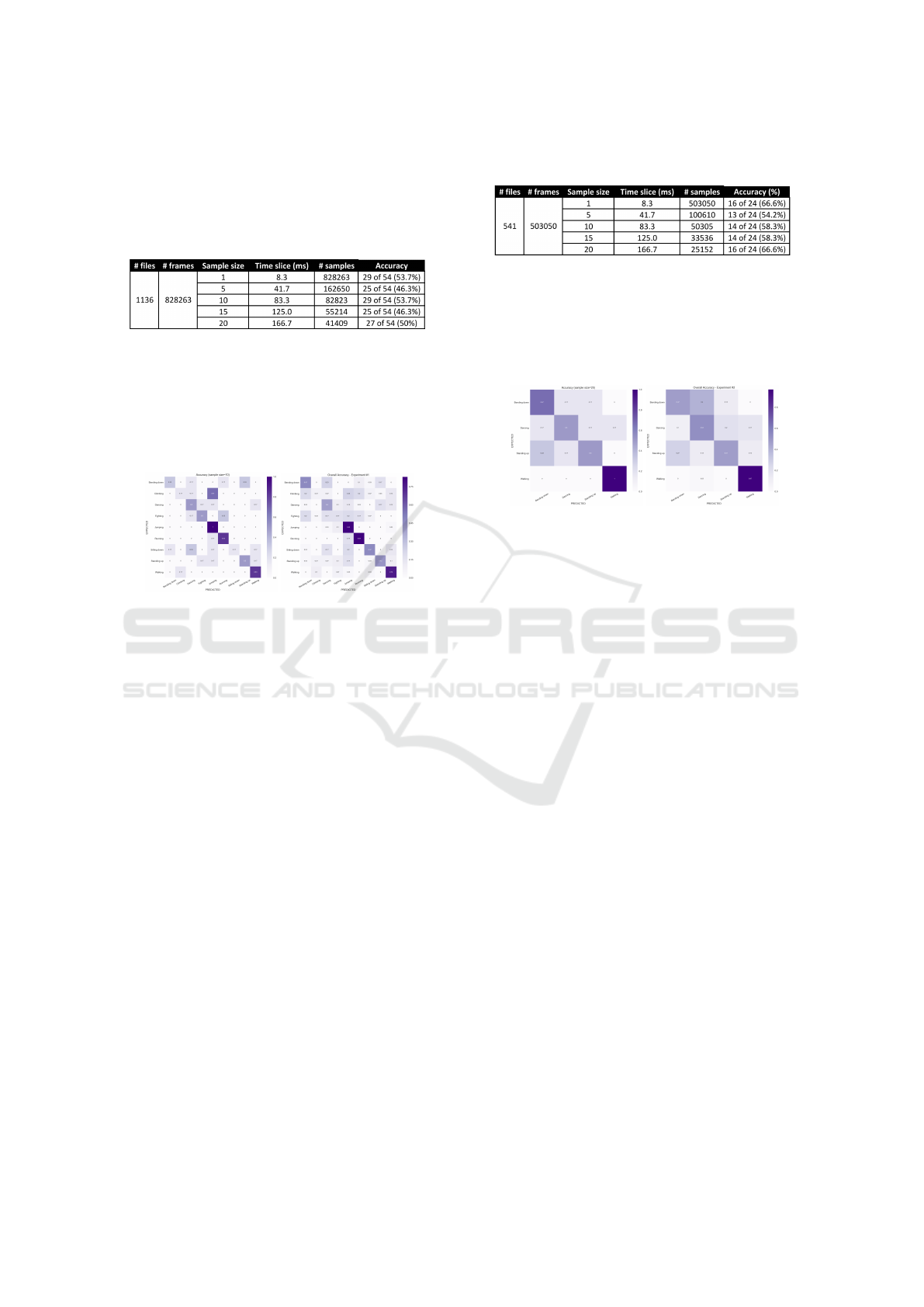
that the larger the size of the sample, the lower the
amount of samples, although temporal relations are
better represented.
Table 1: First experiment accuracy results considering dif-
ferent page size and all 9 labels of the ontology.
Figure 4 shows the confusion matrix we obtained
by taking, as an example, the best result in our ex-
periment (the one where sample size = 10). In this
experiment we can clearly see as the darker regions
of the matrix, that some of classes like ‘jumping’
or ‘walking’ has been better learned by the network
than other classes.
Figure 4: Confusion matrices for the predictions conside-
ring sample size = 10 (on the left) and the overall result
after combining all 5 predictions (on the right).
These results were indicating that the network was
underperforming while predicting some of the clas-
ses, most likely due to the problem of underfitting
(Brownlee, 2018) since the size of the training data
set for each category varies significantly (the smal-
ler data set corresponds to 31% the size of the largest
one).
4.5.2 Experiment # 2
In order to try to minimize these effects, a se-
cond round of predictions have been performed
considering only the four larger data sets avai-
lable: bending down, dancing, standing up,
walking where each of them have more than 100,000
frames, changing the ratio between the smaller and
larger data sets to 76%.
The results obtained on this second round of pre-
dictions are presented in Table 2 below. They are
evidence that the low accuracy detected in the first
experiment was due to underfitting the model, which
means that with a larger training data set the network
should perform better even when considering larger
ontologies.
Once more, taking the best result as an example,
calculating the confusion matrix for the experiment
Table 2: Accuracy results after second experiment that con-
sidered only the four larger training data sets.
resulted in Figure 5. Here the results were signi-
ficantly better relatively to the previous experiment.
This can be observed considering that the values in
the main diagonal of the matrix are higher than the
rest of the matrix (ideally a confusion matrix would
appear as an identity matrix).
Figure 5: Confusion matrices for the predictions conside-
ring sample size = 20 and the four larger training data sets
(on the left) and the overall result after combining all 5 pre-
dictions (on the right).
Although the results after this experiment repre-
sented an improvement in regard to the last experi-
ment, they still were not as good as one could ex-
pect. After a careful analysis of the confusion ma-
trices obtained after the combined results for each
experiment, it was noticeable that a specific set of
classes were performing better despite the fact those
were not the larger data set at disposal. Figure 4
on the right show this combined matrix where it is
possible to infer this alternative four classes of prefe-
rence: “bending down”, “jumping”, “running” and
“walking” as the four ones showing the most promi-
sing results.
Next section present the results for the third expe-
riment considering exactly these four classes. Worth
noticing that these data sets have significantly diffe-
rent training data set sizes and still the network were
able to train satisfactorily in them. We hypothesize
that this is due the nature of those specific actions that
significantly vary from each, making it simpler for the
network to differentiate them from each other.
4.5.3 Experiment # 3
In this experiment all training data set was composed
of 903 files, separated into four categories: “bending
down”, “jumping”, “running” and “walking” and the
prediction data set containing 24 files.
This was the most successful experiment of them
all and the results clearly demonstrate the feasibility
Using LSTM for Automatic Classification of Human Motion Capture Data
241
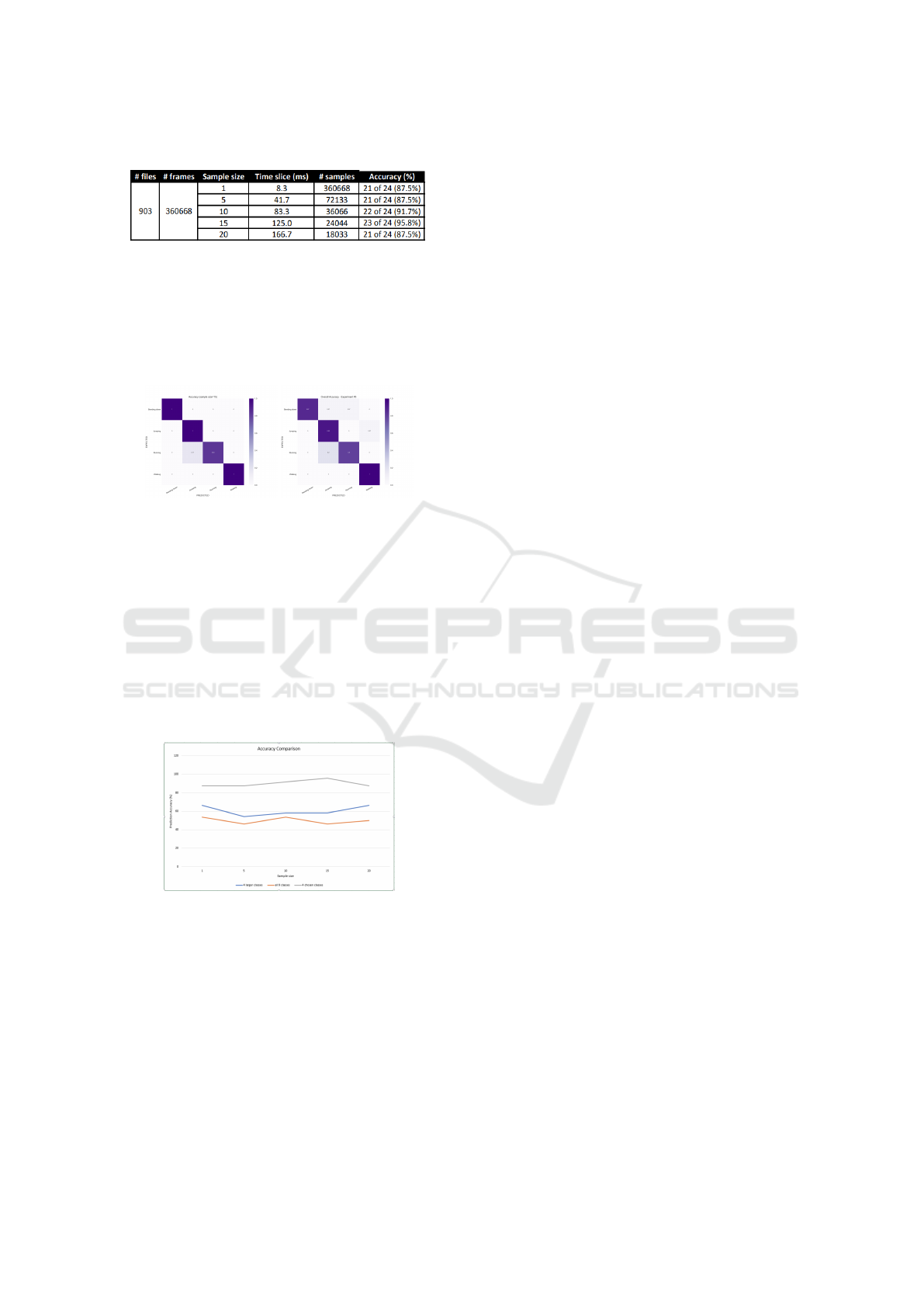
Table 3: Accuracy results after third experiment.
of the model and allow us to conclude that the other
experiments would also perform better if more trai-
ning would be available.
Figure 6 below depicts the results for the best ex-
periment performed under the described conditions
(size = 15) and also the resulting obtained by com-
bining all five experiments with this ontology.
Figure 6: Confusion matrices considering sample size = 15
and four selected labels (on the left) and the overall result
of the experiment on the right.
4.5.4 Summary
Figure 7 compares the accuracy (vertical axis) obtai-
ned with the experiments using different sample sizes
(horizontal axis). In orange it is shown the predicti-
ons considering all 9 categories, in blue the predicti-
ons using a subset containing only the four larger data
sets and in gray the experiment selecting the four most
successfully recognized in the first experiment.
Figure 7: Comparison between the results of the three ex-
periments.
In summary, the results obtained with these expe-
riments can be considered promising, indicating the
viability of the model, showing that a stacked LSTM
neural network can successfully learn how to classify
human actions from motion capture data (proof-of-
concept).
4.6 Limitations
• Right now our system has the limitation of only
using CMU library skeleton structure (Figure 3),
which means that all training files and prediction
data have to have the same length (N
joints
). A
more generic approach that shall consider retar-
geting different skeleton structures into a baseline
model, thus allowing using multiple representati-
ons together is under development;
• Also, another limitation regarding data is the fact
that we are constrained to the size of the trai-
ning data set available for experimentation. So,
the results that have been obtained reflect that.
Although, the significant improvement the second
experiment showed relatively to the first, make us
confident that this, at least, indicates the feasibi-
lity of the model and that, with larger databases,
the system should perform much better in terms
of accuracy classifying the data thus solving the
underfitting problem;
• Allowing recognition of other features from the
motion captured data, such as affective body pos-
tures (Kleinsmith et al., 2011), and gestures, e.g.
a ‘happy walk’ or a ‘sad handshake’. This feature
would be of the most importance when trying to
retrieve creative content that involves digital ac-
tors (pantomime) and crowd simulations;
• Extending the ontology in a way that would al-
low developing automatic recognizers for any ot-
her type of media related to the creative process in
a studio.
5 CONCLUSIONS
Finding new (more efficient) ways of authoring crea-
tive content is a feature that interest the most to com-
panies in this sector. This work aims at studying ways
of improving productivity by reducing time and ef-
fort authoring new animations by reusing older me-
dias into new projects. Since the volume of material
produced by such companies can be extremely large,
cataloging old ‘assets’ to facilitate tag-based searches
for future reference is a key aspect when dealing with
problems of this nature.
In this project, we are interested in developing
a tool for automatic classification of motion capture
content in terms of the actions the actor is performing,
like walking, running, jumping, etc.
We designed a system that relies on deep lear-
ning, more specifically on long short-term memory
(LSTM) neural networks, to analyze the content of
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
242

motion capture files in BVH format and classify it
according to labels defined by a simplified ontology
composed of 9 action tags.
Our approach considered a separate data set of ca-
refully edited mocap files for training the network on
how to recognize each action. These data sets were
adapted from the freely available CMU Motion Cap-
ture Library. After training, the network was tested
using a different set of files that did not have been
used during training. For the sake of assessment, each
of these files were manually annotated with the ex-
pected label.
Comparing the results obtained by the classifica-
tion software against the expected manually annota-
ted tags, the system showed, in several of the tests, an
accuracy in some cases better than 95%, what can in-
dicate that the original hypothesis have been satisfied.
For the future, it’s expected to improve training
by adding other actions to the ontology like, for in-
stance, considering affective body postures and/or ot-
her kinds of medias that might be of interest in a pro-
duction pipeline like textures, sounds, etc.
The ultimate goal would be to design an extenda-
ble modular content annotator capable of annotating
with different types of medias, based on a general-
purpose ontology.
Another possible application that might gain from
this automatic motion capture action recognition
technology is authoring character animations for the
purpose of retargeting crowd behaviors to different
scenarios. In theory, such an AI system could help
understanding each character’s movements in a given
situation and then help adapting the animations to new
target scenarios, and facilitate authoring crowd simu-
lation.
ACKNOWLEDGMENT
This publication has emanated from research sup-
ported in part by a research grant from Science
Foundation Ireland (SFI) under the Grant Number
15/RP/2776 and in part by the European Unions Hori-
zon 2020 Research and Innovation Programme under
Grant Agreement No 780470.
REFERENCES
Brownlee, J. (2018). Long Short-Term Memory Networks
with Python - Develop Sequence Prediction Models
With Deep Learning. Machine Learning Mastery.
[eBook].
B
¨
utepage, J., Black, M. J., Kragic, D., and Kjellstr
¨
om,
H. (2017). Deep representation learning for hu-
man motion prediction and classification. CoRR,
abs/1702.07486. http://arxiv.org/abs/1702.07486.
CMU Graphics Lab (2018). CMU graphics lab motion cap-
ture database. http://mocap.cs.cmu.edu/.
Delbridge, M. (2015). Motion Capture in Performance -
An Introduction. Palgrave Macmillan UK, first edition
edition.
Du, Y., Wong, Y., Liu, Y., Han, F., Gui, Y., Wang, Z.,
Kankanhalli, M., and Geng, W. (2016). Marker-less
3D human motion capture with monocular image se-
quence and height-maps. In European Conference on
Computer Vision, pages 20–36. Springer.
Fabbri, M., Lanzi, F., Calderara, S., Palazzi, A., Vezzani,
R., and Cucchiara, R. (2018). Learning to detect and
track visible and occluded body joints in a virtual
world. CoRR, abs/1803.08319. http://arxiv.org/abs/
1803.08319.
Gupta, A., Martinez, J., Little, J. J., and Woodham, R. J.
(2014). 3d pose from motion for cross-view action re-
cognition via non-linear circulant temporal encoding.
In 2014 IEEE Conference on Computer Vision and
Pattern Recognition, pages 2601–2608.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-
term memory. Neural Computation, 9(8):1735–1780.
D.O.I.: 10.1162/neco.1997.9.8.1735, https://doi.org/
10.1162/neco.1997.9.8.1735.
Kleinsmith, A., Bianchi-Berthouze, N., and Steed, A.
(2011). Automatic recognition of non-acted affective
postures. Trans. Sys. Man Cyber. Part B, 41(4):1027–
1038. D.O.I.: 10.1109/TSMCB.2010.2103557.
Martinez, J., Black, M. J., and Romero, J. (2017). On
human motion prediction using recurrent neural net-
works. CoRR, abs/1705.02445. http://arxiv.org/abs/
1705.02445.
Menache, A. (2011). Understanding Motion Capture for
Computer Animation. Morgan Kaufmann, second edi-
tion edition.
SAUCE Project (2018). Smart asset re-use in creative envi-
ronments - SAUCE. http://www.sauceproject.eu.
Tekin, B., Rozantsev, A., Lepetit, V., and Fua, P. (2016). Di-
rect prediction of 3d body poses from motion compen-
sated sequences. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
991–1000.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In The IEEE
Conference on Computer Vision and Pattern Recog-
nition (CVPR).
Using LSTM for Automatic Classification of Human Motion Capture Data
243
