
Detection of Imaged Objects with Estimated Scales
Xuesong Li, Ngaiming Kwok, Jose E. Guivant, Karan Narula, Ruowei Li and Hongkun Wu
School of Mechanical and Manufacturing Engineering,
The University of New South Wales, NSW 2052, Australia
Keywords:
Computer Vision, Object Detection, Convolutional Neural Network.
Abstract:
Dealing with multiple sizes of the object in the image has always been a challenge in object detection. Pre-
defined multi-size anchors are usually adopted to address this issue, but they can only accommodate a limited
number of object scales and aspect ratios. To cover a wider multi-size variation, we propose a detection
method that utilizes depth information to estimate the size of anchors. To be more specific, a general 3D
shape is selected, for each class of objects, that represents different sizes of 2D bounding boxes in the image
according to the corresponding object depths. Given these 2D bounding boxes, a neural network is used to
classify them into different categories and do the regression to obtain more accurate 2D bounding boxes. The
KITTI benchmark dataset is used to validate the proposed approach. Compared with the detection method
using pre-defined anchors, the proposed method has achieved a significant improvement in detection accuracy.
1 INTRODUCTION
Object detection is an important topic in computer vi-
sion community. Classical methods are usually de-
veloped based on handcrafted image features, such
as histograms of oriented gradient (HOG) (Dalal and
Triggs, 2005) and the deformable part model (DPM)
(Felzenszwalb et al., 2008). Recently, convolutional
neural network (CNN) has attracted much research at-
tention due to its astonishing performance for object
detection task(Ren et al., 2015; Liu et al., 2015; He
et al., 2017), whereby the image features are automa-
tically learned rather than handcrafted. These frame-
works (Ren et al., 2015; Liu et al., 2015; Redmon
et al., 2015) are widely used in image-based object
detection problems.
CNN-based object detection methods consist of
two main components: classification and localization.
Classification mainly relies on features of the target
object while localization regression depends on both
features and object sizes. CNN is able to find scale-
invariant and object-specific features to identify the
objects; however, object sizes in the image are not
know a priori which makes detection tasks much more
difficult than classification tasks. In real-world appli-
cations, objects captured in an image usually have a
large scale variation such as shown in Fig.1; that ma-
kes object detection even more challenging. In order
to detect objects of different sizes, strategies including
Object scale
Number of sample
Figure 1: Object scale histogram of KITTI, object scales
are depicted as the root square of object area divided by the
image size. The histogram bin size is 0.005.
image pyramid and multiple anchors were proposed.
Multi-size anchors are more commonly utilized to fit
their corresponding objects, due to computation effi-
ciency and cheap memory cost. For example, in the
Faster-RCNN (Ren et al., 2015), 9 discrete anchors
with 3 scales and 3 aspect ratios are adopted to handle
all object sizes. Then the most promising anchors are
the ones with similar sizes to the objects in the image,
and they are selected as inputs to the next stage clas-
sifier and regressor.
Those selected anchors are the discretized samples
from the continuous space of box scale and aspect ra-
Li, X., Kwok, N., Guivant, J., Narula, K., Li, R. and Wu, H.
Detection of Imaged Objects with Estimated Scales.
DOI: 10.5220/0007353600390047
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 39-47
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
39

tio with a set of fixed bins. Although using a larger
number of anchors can better represent the continu-
ous space, the corresponding increases in complexity
make regressors difficult to learn scale-invariant fea-
tures and deep learning models expensive to train. On
the contrary, it is difficult to find a fit for objects with
only a few anchors. Given size variations in the data-
set, the number of anchor scales and their aspect ratios
are important hyperparameters. The detection perfor-
mance is usually susceptible to improper settings of
these hyperparameters. In order to find out how these
hyper-parameters affect final performance and how to
select the optimal ones, we designed multiple control-
led experiments on KITTI benchmark dataset (Gei-
ger et al., 2012). We found that the set of designed
anchors for object detection should adequately cover
the continuous space of object scales and aspect ra-
tios, and simultaneously keeps a minimal number of
anchors. Subject to such a contradictory criterion, the
selection of the optimal hyperparameters is a challen-
ging task.
In order to satisfy both the requirements for desig-
ning anchors, we iteratively explore whether it is pos-
sible to estimate the continuous object scale that can
cover the whole scale space instead of pre-defining
multiple discrete anchors with fixed scales and as-
pect ratios. To acquire continuous scales, we utilize
the distance of the object with respect to the sen-
sor to estimate the coarse scale of the detected ob-
jects. A corresponding detection framework based
on CNN is also proposed to validate how estimated
scales can improve detection performance. To vali-
date our method, we conducted extensive evaluations
on the KITTI benchmark with a fine-grained analy-
sis. Our proposed method can outperform state-of-
the-art with predefined anchors while using the same
CNN backbone, especially on detecting difficult ob-
jects. The proposed method can also be assembled
into multi-object detection algorithms with complex
detection frameworks (Ren et al., 2017) (Dai et al.,
2017). Our code is open-source and freely available
on github
1
.
There are three main works in our paper as follo-
wing.
• Designed controlled experiments to answer the
question of how the number of predefined anchors
affects the detection performance.
• Proposed a detection method based on estimated
size of objects.
• Conducted massive experiments on the KITTI
benchmark to validate our method.
1
Main open-source code can be found: https://github.
com/Benzlxs/Object detection estimated sclales
The rest of the paper is organized as follows.
Section 2 is an introduction to the related work, follo-
wed by Section 3 which illustrates how multiple an-
chors affect detection accuracy. Our proposed de-
tection method is presented in Section 4. Experi-
ments of the proposed method are given in Section 5.
Section 6 concludes our main work and summarizes
the contributions of this paper.
2 RELATED WORK
2.1 Mutli-size Detectors
Scale-space theory (Lindeberg, 1990) is a vital and
fundamental theory in signal processing, and signifi-
cant research has been devoted to this field. Multi-
size detectors (Ren et al., 2015) are usually utilized
to address multi-scale of objects. Multi-size detec-
tors take one-size input and apply multi-size detec-
tors to detect their corresponding objects (Ren et al.,
2015; Lin et al., 2016; He et al., 2016). The Faster-
RCNN (Ren et al., 2015) implements detection on the
final feature map using 9 different anchors with 3 dif-
ferent sizes and 3 different aspect ratios. Each an-
chor can represent one size detector that finds objects
with similar sizes. However, the final feature map
is usually at a low resolution with high-level seman-
tic information, which makes small objects detection
very challenging. To improve small objects detection,
the feature pyramid network is proposed to propagate
high-level semantic information in deeper layers back
to shallower layers with high-resolution maps; Small
objects are mainly detected from fused shallower fea-
ture maps (Lin et al., 2016). The recurrent rolling net-
work extends feature pyramid network by using a re-
current neural network to fuse feature maps from dif-
ferent layers and integrate context information (Ren
et al., 2017). However, even pyramid feature maps
may not be useful for detecting small-size object since
high-level information does not contain the semantic
feature on small objects. Therefore, to increase the fi-
nal feature map resolution, by upsampling the image,
has become the most common practical technique to
detect small objects instead of building an image py-
ramid (He et al., 2016).
Some methods are proposed to change the size
of the receptive field to accommodate multi-scale ob-
jects, which includes the dilated and deformable con-
volutional network (Dai et al., 2017; Yu and Kol-
tun, 2015). Transformation parameters are learned
by a network, similar to STN (Spatial Transformer
Networks) (Jaderberg et al., 2015), by building the
STN to perform an affine transformation on input fe-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
40

atures for the classification task. These methods re-
quire the CNN backbone in the detection model to le-
arn scale-invariant features and utilize one detection
head to do classification and regression on all scale
objects together. Contrary to this, two sub-networks
are used to predict multi-scale objects independently
(Li et al., 2015), and every sub-network handles ob-
ject within its scale range. Such kind of indepen-
dent prediction is made at layers of different resolu-
tions. MSC-CNN (Cai et al., 2016) claims that re-
ceptive filed of CNN should be consistent with the
size of objects, and design algorithms to detect dif-
ferent scale objects on feature maps of multiple re-
solutions. Every resolution represents one receptive
field size on which objects within certain scale ranges
are found. Deep learning models can manage to learn
scale-invariant representations when the scales varia-
tion is not large but still suffers from extremely small
and large scale variations of objects. On the other
hand, scale-specific methods with an image pyramid
can handle all scales well. To combine the advantages
of scale-variant and scale-invariant methods, coarse
image pyramids are built (Singh and Davis, 2017; Hu
and Ramanan, 2016) from 3 levels as input. Every
level in the pyramid corresponds to one detection mo-
del which is just required to deal with a fixed range of
scales instead of all object scales in the training data-
set. Such methods usually achieve the state-of-the-art
performance where each object detector focuses only
on objects within certain scale ranges.
All multi-scale detection methods mentioned in
this section rely on manually predefining anchors.
Every anchor is designed to cover one size of target
objects and its region in the image will be pooled into
a fixed shape as scale-invariant feature representati-
ons, so hyperparameters of these anchors are vital for
detection performance. Instead of heavily relying on
tuning the hyperparameters of anchors, we proposed a
detection method in this work that uses estimated an-
chors to conver all continuous scales and aspect ratios
of detected objects.
2.2 Depth based Detection Methods
Depth information is already available in many ap-
plications. To take advantage of the depth data for
object detection, common methods compress 3D in-
formation into 2D information on which the CNN is
applied directly. 3D point cloud is encoded into a
cylindrical-like image where every valid element car-
ries 2-channel data so that the 2D image can inherit
all the information from the 3D point cloud (Li et al.,
2016). The 2D CNN is then used to process such kind
of 2D image to detect the object. However, such kind
of data representation fails to achieve decent detection
performance. To improve accuracy further, The work
in (Chen et al., 2016) convert 3D point cloud into
birdview representation which includes many height
maps, a density map, and an intensity map; based on
this representations, the CNN is then applied to pro-
pose 3D object candidates. These methods actually
regard point clouds as one extra image channel and
are similar with ideas used to deal with RGBD data
(Gupta et al., 2014). In this work, we employ raw
depth data to estimate coarse scale in an efficient and
simple manner instead of encoding depth information
into some feature maps. Estimated scales can remove
the need for manually predefining anchors and are
able to cover all possible continuous scales.
3 MULTIPLE ANCHORS
Predefined multi-scale anchors are crucial to the per-
formance of the detection method. This section des-
cribes how these anchors affect detection results and
how to select optimal predefined anchors.
3.1 Scales and Aspect Ratios
Predefined anchors are a set of boxes with different si-
zes
(w
i
,h
i
) : 1 6 i 6 N
in which w
i
and h
i
are width
and height of the box respectively, and N is the num-
ber of predefined anchors. The size of an anchor is
defined by its scale and aspect ratio that denote the an-
chor area and the ratio between box height and width.
At each sliding-window location (x
j
,y
j
), N proposal
boxes
(x
j
,y
j
,w
i
,h
i
) : 1 6 i 6 N,1 6 j 6 W × H
,
where W and H are the size of feature map will be
predicted by the network. Therefore, H ×W × N pro-
posals will be generated by the region proposal net-
work. Each anchor size, (w
i
,h
i
), can be calculated
according to equation. 1 and 2.
w
i
=
S
k
p
R
j
(1)
h
i
= S
k
×
p
R
j
(2)
Scales
S
k
: 1 6 k 6 K
are another set of pre-
defined parameters. Every S
k
represents one scale of
the anchor and can be calculated as the root square of
the anchor region in the image coordinate.
R
j
: 1 6
j 6 J
is the set of aspect ratios, and J is the number
of predefined aspect ratio for every scale. As shown
in Equ. 1 and 2, every scale will be expanded to J
anchors, which have the same area of different ratios
between height and width, in order to handle various
poses of the same object in the image. The number
Detection of Imaged Objects with Estimated Scales
41

Aspectio ratio(H/W)
Number of samples
Figure 2: Object aspect ratio histogram of KITTI dataset.
Aspect ratios are calculated by dividing H by W of the box
size. Histogram bin size is 0.001.
of anchors N is K × J, and H ×W × K × J proposal
boxes will be generated.
3.2 Anchor Selection
Variables S
k
and R
j
are very important user-defined
hyperparameters. To understand how these hyper-
parameters affect the final detection performance,
we conduct controlled experiments on KITTI dataset
(Geiger et al., 2012). The object scale and aspect ratio
histograms can be found in Fig. 1 and 2. The domain
of scale and aspect ratio variation are [0.0, 0.64] and
[0.25,10.56] respectively. In our experiments, we uni-
formly sample different scales in [0.02,0.54] instead
of the full range, because the 99.5% of the objects in
the training data reside in this range and the full range
with extremely large and small scale will bring very
heavy experimental workload. Similarly, the chosen
sampling range of aspect ratios is between [0.25,4.0],
in which 99.5% of all the objects can be covered. The
Faster-RCNN (Ren et al., 2015) with VGG16 net-
work backbone (Simonyan and Zisserman, 2014) is
employed in our experiments
1
. Results are plotted in
Fig. 3.
From the Fig. 3, we find that three anchors set-
tings, (K = 3,R = 25), (K = 5,R = 15) and (K =
7,R = 11), can respectively achieve the best perfor-
mance among their anchor sets with the same aspect
ratios (K) but different scales (R). The interesting
phenomenon is that the total number of anchors in
these three sets is very similar and close to 75. When
the anchor number is small, less than 75, the detection
accuracy is proportional to the anchor number. It is
because more anchors can help to better cover the
1
Experimental code and results can be found https://
github.com/Benzlxs/TFFRCNN
0 5 10 15 20 25 30
Number of scale
40
50
60
70
80
90
100
Detection mAP
3-aspect-ratio
5-aspect-ratio
7-aspect-ratio
Figure 3: Comparison of detection mAP against different
combinations of scales and aspect ratios. The Detection
mAP is the mean average detection precision of car, cyclist
and pedestrian of all degree of difficulties.
continuous domain of all object sizes, and every an-
chor just needs to handle a small range of size varia-
tion which reduces learning difficulties of the region
proposal network. If the number of anchors is too
large, the detection accuracy will be inversely propor-
tional to the anchor number. The reason is that a lar-
ger number of possible predefined boxes will lead to a
significant imbalance between the positive and nega-
tive examples, and easy negative examples can over-
whelm the training of region proposal network which
may in turn lead to degenerate models. Another rea-
son is that the number of convolution prediction filters
increases linearly with the number of anchors; toget-
her with the fixed number of training labels, a large
proportion of the prediction filters are unable to get
enough training. Besides, as the number of prede-
fined anchors increases, the computational and me-
mory cost will also increase and more training time
will be required. It is concluded that predefined an-
chors should be able to cover all possible scales of
objects, but their numbers should be as small as pos-
sible.
It is difficult to predefine anchors that satisfy both
the requirements mentioned above. The common way
is to conduct trial-and-error experiments to find the
optimal number for one dataset, which can be com-
putationally demanding and time-consuming. There-
fore, we introduce the depth information into the net-
work in order to reduce the required number of an-
chors. The depth information is utilized to estimate
the coarse size of the objects that ca cover the conti-
nuous scale and aspect ratio ranges at the same time.
For every location, only a few anchor boxes are gene-
rated according to the number of target object types
and real size variations.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
42

Figure 4: Examples of projection from P
3D
to P
2D
. The top
image is 3D bounding boxes of P
3D
in point cloud coor-
dinate, and the bottom one is 2D bounding boxes of their
corresponding P
2D
.
4 DETECTION WITH
ESTIMATED ANCHOR
In many real-world applications, like the driverless
car and indoor service robot, depth information is
there for other purposes and can be obtained easily
by depth sensors such as stereo camera or Lidar. The
depth information can decide the object location in
3D space, and coarse 3D size of detected objects can
be predefined, for example, 4.2 × 1.8 × 1.6 m
3
can
coarsely represent the 3D bounding box of a sedan.
Given calibration parameters between the depth sen-
sor and camera, the 3D bounding box can be projected
into a 2D region in image coordinate, and the 2D re-
gion can be used to represent a coarse scale of the de-
tected object. Thousands of projected regions will be
generated and used to crop object features from light
feature map compressed from conv5 3 of VGG16.
RoI (Region of Interest) pooling is implemented to
convert every region feature into fixed shape as scale-
invariant feature representations. The scale-invariant
network consisting of two fully connected layers is
used to do coarse classification and regression to find
valuable proposals. It has the similar function with
the region proposal network. Selected regions are
then used to do cropping and RoI pooling on the thick
feature map conv5 3 for the second-stage classifica-
tion and regression which includes three-layers of the
fully connected network.
Based on the observation of the process described
in the previous section, the proposed detection met-
hod will estimate a coarse region size of the object,
(w
i
,h
i
), and applies it to enhance the performance of
object detection. In this section, inference about ob-
ject size and how to integrate scale into the CNN fra-
mework for object detection will be presented.
4.1 Anchor Estimation
The distance between the observer and objects can al-
most tell their scales in the image, so scale for dif-
ferent objects can be coarsely estimated from their
depth map. Without predefining a set of possible an-
chors, we utilize depth to estimate the coarse size of
target objects. Given image coordinates and depth
data, 3D point cloud can be generated using simple
affine transformation. Some noisy points represen-
ting the sky region will be removed. Thousands of
3D bounding boxes that can represent the coarse 3D
size of detected objects are employed to wrap all se-
lected points. These 3D bounding boxes are projected
back into image coordinate to find the coarse sizes of
the anchors.
We validate our method using KITTI dataset
where point cloud data is available. The 3D space
range for sampling 3D bounding boxes are [0,70] m
along x axis and [−40,40] m along y axis under Lidar
coordinate convention. We slide these 3D bounding
boxes along x and y axes with 0.4 m intervals on the
road plane which can easily be estimated by random
sample consensus. 3D boxes are filtered out by remo-
ving those in which the number of points is less than
4. Then, 8 corner points P
3D
of remaining boxes will
be projected back to points P
2D
in image coordina-
tes according to Equ.3, where R is the rotation matrix
and T is the transformation matrix. Calibration para-
meters are provided in the KITTI dataset.
P
2D
= R × P
3D
+ T (3)
Projected boxes in the image coordinate can be
employed as the coarse size of the anchor, such as in
Fig. 4. Instead of sliding a fixed set of anchors over
every point in the feature map as in Faster-RCNN, we
just generate a smaller number of region boxes on in-
teresting points, about 40,000 of them, while Faster-
RCNN with 15 anchors will generate about 200, 000
region boxes.
4.2 Detection Network
CNN has been widely and successfully used to ex-
tract features from an image for object detection and
classification, and it is adopted to generate feature
maps in our detection method. Based on feature maps,
fully connected layers are employed to do classifica-
tion and regression. The method pipeline is depicted
in Fig. 5.
The VGG16 (Simonyan and Zisserman, 2014) are
used to generate feature maps from the input image.
Numerous 2D boxes N
roi
will be estimated from depth
information according to the method described in the
Detection of Imaged Objects with Estimated Scales
43

Figure 5: The proposed detection framework. Backbone is pretrained VGG16.
previous section. Usually, the last layer of feature
maps has a large number of channels (512 in VGG16).
If we crop features from the estimated boxes directly
on a wide feature map, the large number of scale
boxes will be memory-intensive and computationally
expensive. Therefore, by using 1 × 1 convolutional
layers, we compress the last layer of feature maps,
the conv5 3 of VGG16, into a thin feature map, Fe-
ature map 1 in the Fig.5, with 32 channels of the
same width and height. Compressed feature maps
are designed to select primary features for region pro-
posal network. Every estimated region box will be
used to crop its corresponding feature on Feature map
1 into 5 × 5 × 32 scale-invariant features, also cal-
led ROI pooling operation. Then, features are con-
nected with light-weight FC1 which consists of two
fully connected layers with 512 neurons per layer.
The FC1 plays the same role as the region proposal
network in the Faster-RCNN (Ren et al., 2015); it
will perform coarse classification with output N
roi
×
2( f oreground/background) and regression of boxes
with output N
roi
×4. N
rpn
will be selected from N
roi
as
a mini-batch to train the FC1 network. All predicted
boxes are post-processed by non-maximum suppres-
sion (NMS) to select the top N
prop
proposals. Since
the number of proposals is small, selected proposals
are used to do RoI pooling directly on the last layer of
the backbone conv5 3. Then, 7 × 7 × N
prop
features
are produced and connected to FC2 which contains
three layers of the fully connected layers with 2048
neurons each. The FC2 will generate final detection
results, N
prop
×C (the number of category) for classi-
fication and N
prop
× 4 for bounding box regression.
The loss function is defined in Equ. 4, 5 and 6,
which consists of two terms, L
rpn
and L
2s
. L
rpn
is
used to train the region proposal network, FC1, while
L
2s
is for the second-stage refineing network, FC2.
Loss of the whole detection network is the sum of
these two term with weighting parameter α. L
cls
is
the cross entropy between predicted categories and
corresponding labels, and L
reg
is the smooth
L1
loss
function (Ren et al., 2015). p
i
and t
i
are the outputs
of classification and regression network; p
i∗
and t
i∗
are their corresponding ground truths. A set of pro-
posals N
rpn
, 512 in our configuration, is selected from
N
roi
. When calculating the regression loss, only po-
sitive labels will be counted ( indicates that there is
a positive label). N
pos
rpn
represents the number of po-
sitive labels, and N
prop
, 1024 in our configuration, is
the number of samples we selected for the second-
stage network FC2. These hyperparameters are se-
lected according to numerous experiments in the next
section. The AdamOptimizer (Kingma and Ba, 2014)
is employed to train our network end-to-end.
L
all
= L
rpn
+ αL
2s
(4)
L
rpn
=
1
N
rpn
∑
i
L
cls
(p
i
rpn
, p
i∗
rpn
)
+
1
N
pos
rpn
∑
i
ob j
i
L
reg
(t
i
rpn
,t
i∗
rpn
)
(5)
L
2s
=
1
N
prop
∑
j
L
cls
(p
j
2s
, p
j∗
2s
)
+
1
N
pos
prop
∑
j
ob j
i
L
reg
(t
j
2s
,t
j∗
2s
)
(6)
5 EXPERIMENTS
The proposed method is evaluated on the KITTI ben-
chmark, which includes 7481 training and 7518 tes-
ting sets of high-resolution images. LIDAR laser data
is also available. Since the ground truth of the tes-
ting dataset is not publicly available, we split the trai-
ning dataset in the 3:1 ratio for training and valida-
tion respectively. These are then used to conduct
comparative experiments for the purpose of deducing
how the hyperparameters affect the detection perfor-
mance. The 0.7 IoU threshold for the car and 0.5 IoU
threshold both for pedestrian and cyclist are used to
calculate mean Average Precision (mAP). Lastly, the
adequately-trained network model with optimal hy-
perparameters is deployed to process the testing data-
set and the detection result is submitted to the bench-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
44
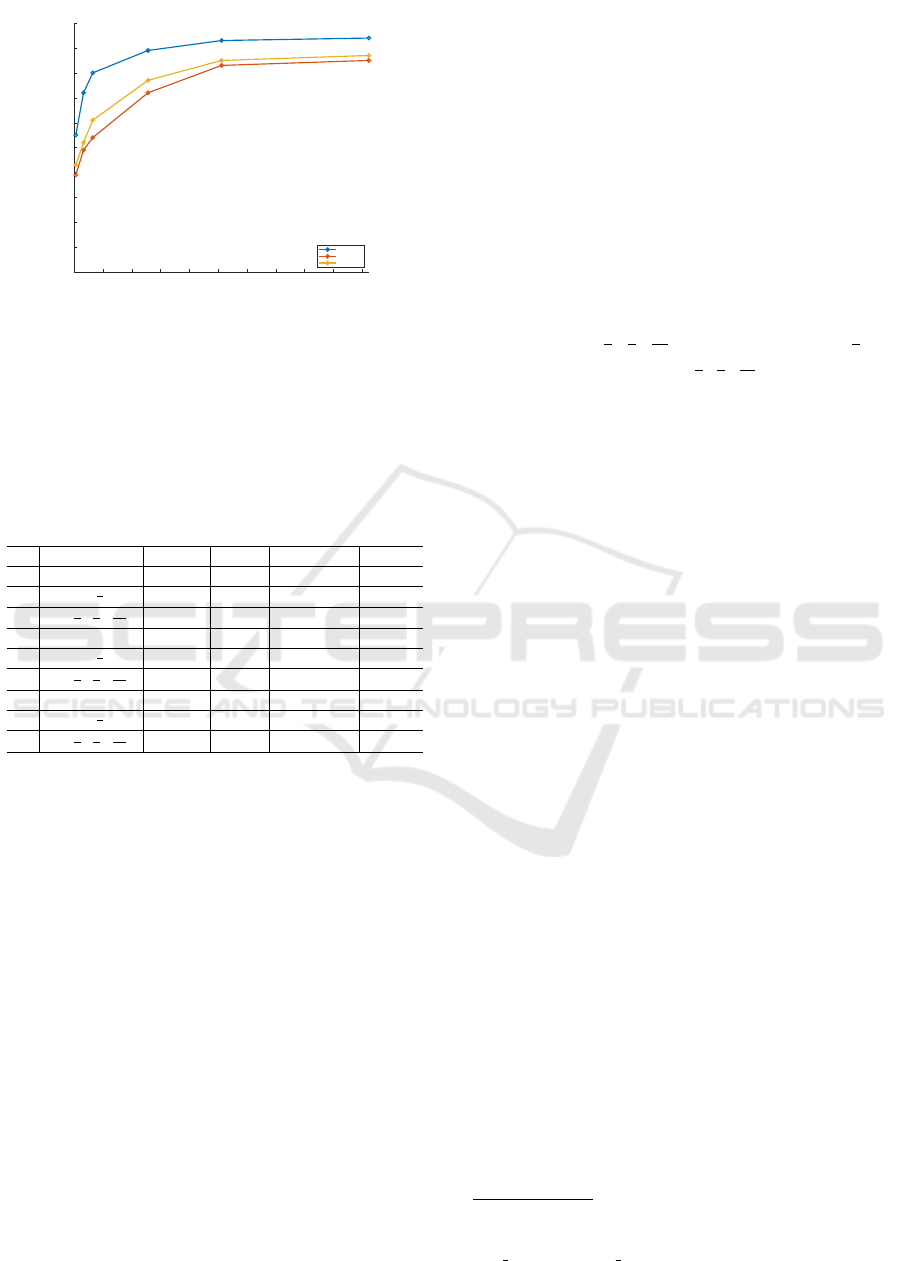
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Number of proposals
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
car
pdestrain
cyclist
Figure 6: Proposal recall on the KITTI validation set for
three classes.
mark site to compare against the Faster-RCNN met-
hod.
Table 1: Experiments on how to select predefined 3D boun-
ding boxes, the detection performance is mAP(%) of easy,
moderate and hard categories. The definition of easy, mode-
rate and hard objects can be found in the benchmark (Geiger
et al., 2012).
K orientation ∼ N
roi
car pedestrian cyclist
1 [0] 5,000 76.48 68.12 60.78
1 [0,
π
2
] 10,000 85.64 71.29 70.36
1 [0,
π
4
,
π
2
,
3π
4
] 20,000 89.12 72.01 74.51
2 [0] 10,000 80.65 71.85 63.62
2 [0,
π
2
] 20,000 88.23 73.96 74.82
2 [0,
π
4
,
π
2
,
3π
4
] 40,000 91.68 74.00 76.45
3 [0] 15,000 81.87 72.93 63.80
3 [0,
π
2
] 30,000 90.03 74.03 74.64
3 [0,
π
4
,
π
2
,
3π
4
] 60,000 91.51 74.09 76.51
For data augmentation, horizontally flipping and
color jittering are used to increase the number of trai-
ning dataset. The data is augmented by a factor of
three such that its size is three times as big as the size
of the original dataset. The whole detection network
is trained in an end-to-end manner. The AdamOpti-
mizer(Kingma and Ba, 2014) is configured with an
initial learning rate of 0.0005 and exponential decay
factor of 0.6 for every 40,000 iterations.
5.1 Hyperparamters Selection on the
Validation Set
The number of estimated anchors N
roi
and the number
of proposals N
prop
, are important hyperparameters for
our detection framework. For the number of estima-
ted anchors N
roi
, it consists of valid non-road point
cloud and predefined 3D template bounding boxes of
different sizes and orientations. As for box sizes, we
use the k-means clustering method to do clustering
on 3D bounding box size of all training labels and
calculate average box size of every cluster. For ex-
ample, if we just use one size of the 3D bounding
box for the car and setting k=1, the clustered size
result is [3.884(length), 1.629(width),1.526(height)]
m. While if we use two sizes of 3D bounding
box for car and setting k=2, the clustered sizes are
[3.539,1.599,1.506] m and [4.229,1.658,1.546] m.
Experimental results are shown in Table 1, from
which we can find that increasing the orientation and
size (k) number will improve detection performance
until N
roi
is large, like over ∼ 30,000, while large N
roi
will make training much slower and consume more
memory. Considering the tradeoff between efficiency
and accuracy, we finally select size clusters k=2 and
orientations [0,
π
4
,
π
2
,
3π
4
] for car; k=1 and [0,
π
2
] for
pedestrian; and k=2 and [0,
π
4
,
π
2
,
3π
4
] for cyclist in our
framework.
For the number of proposals N
prop
, we output all
the proposals from region proposal network and do
NMS with the IoU threshold of 0.8. The top N
prop
proposals are saved to calculate the recall. The expe-
rimental results are shown in Fig 6, from which we
can find that when N
prop
the is over 1024, the recall
barely increases. Since smaller N
prop
consumes less
memory and speeds up the training procedure, N
prop
of 1024 is chosen for the experiments.
5.2 Evaluation on the Test Set
Results
2
are shown in Table 2, Fig 7 and 8. We
conduct comparisons with the Faster-RCNN, for both
of our method and Faster-RCNN employ the same
VGG16 backbone (Simonyan and Zisserman, 2014),
but different methods to determine the object scale
and aspect ratio. On the KITTI benchmark, results
of Faster-RCNN with 70 anchors are available for all
objects, while Faster-RCNN with 9 anchors is only
evaluated on car detection. For car detection, results
of Faster-RCNN with 70 and 9 anchors are compa-
red with our method. We can find that increasing the
number of anchors can significantly enhance the de-
tection accuracy. The detection performance of the
Faster-RCNN in detecting the car objects peaks when
the anchor number reaches 70. Our proposed met-
hod with the estimated scales, on the other hand, can
gain similar detection accuracy on the easy category.
However, on moderate and difficult categories, esti-
mated scales can help to find the anchor size clo-
sest to the detected object, which reduces the diffi-
culties of regressing locations of moderate and diffi-
cult objects. For pedestrian and cyclist detection, only
2
Testing results can be found in the KITTI object
detection leaderboard http://www.cvlibs.net/datasets/kitti/
eval object.php?obj benchmark=2d
Detection of Imaged Objects with Estimated Scales
45

0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Car
Easy
Moderate
Hard
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Cyclist
Easy
Moderate
Hard
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Pedestrian
Easy
Moderate
Hard
Figure 7: Precision recall curves for object detection on KITTI test set.
Table 2: Detailed result for object detection on KITTI test set, given in terms of average precision (AP).
Object Method mAP Easy Moderate Hard
Car
Proposed method 84.08 % 86.82% 87.10% 78.32%
Faster-RCNN (70 anchors) 79.01 % 87.9 % 79.11 % 70.19%
Faster-RCNN (9 anchors) 54.72% 62.31% 56.58 % 45.27 %
Cyclist
Proposed method 69.88 % 78.51 % 69.80 % 61.32 %
Faster-RCNN (70 anchors) 63.22 % 71.41 % 62.81 % 55.44 %
Pedestrian
Proposed method 69.16 % 77.95 % 67.25 % 62.28%
Faster-RCNN (70 anchors) 68.48 % 78.35 % 65.91 % 61.19 %
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
0.99
1
1
1
1
0.66
1
1
1
1
1
1
0.68
0.33
1
1
1
1
0.59
1
1
0.91
0.91
0.67
0.92
0.56
1
1
1
1
1
1
0.91
0.91
0.67
0.92
0.56
1
1
1
1
Figure 8: Some samples of detection results on KITTI test
set.
Faster-RCNN with 70 anchors is evaluated on the tes-
ting dataset and compared with our method. There
are 6.66 % and 0.68 % accuracy gains in the mAP are
achieved for the cyclist and the pedestrian category re-
spectively. One explanation is that cyclists have much
larger variation in scale and aspect ratio than the pede-
strians, therefore, estimated anchors brings more ad-
vantages than predefined anchors for the cyclists.
6 CONCLUSION
Inexact multiple scales and aspect ratios are obstacles
in the detection of all objects in the image. Classi-
cal methods use predefined anchors to solve this pro-
blem, but the discrete and sparse anchor samples are
not able to cover all scales and aspect ratios.The sim-
ple solution of increasing the number of anchors is
infeasible since a large number of anchors hinders the
training of CNN. To find the optimal size of anchors,
we proposed to use depth information to estimate a
coarse scale of objects and designed the correspon-
ding detection framework. The proposed method can
achieve a significant improvement compared with the
method using a similar backbone and predefined an-
chors. However, using the depth information to esti-
mate coarse anchor sizes makes it unfeasible for many
applications where the depth information is not avai-
lable. Currently, there are researches indicating the
neural network has been successfully used to predict
object depths from a single image. Our future rese-
arch will endeavor to estimate estimate coarse and
continuous anchor sizes from a single image.
REFERENCES
Cai, Z., Fan, Q., Feris, R. S., and Vasconcelos, N. (2016). A
unified multi-scale deep convolutional neural network
for fast object detection. CoRR, abs/1607.07155.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2016). Multi-
view 3d object detection network for autonomous dri-
ving. arXiv preprint arXiv:1611.07759.
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
CoRR, abs/1703.06211.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
46

Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In Computer Vision and Pattern Recog-
nition, 2008. CVPR 2008. IEEE Conference on, pages
1–8. IEEE.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we re-
ady for autonomous driving? the kitti vision bench-
mark suite. In Computer Vision and Pattern Recogni-
tion (CVPR), 2012 IEEE Conference on, pages 3354–
3361. IEEE.
Gupta, S., Girshick, R. B., Arbelaez, P., and Malik, J.
(2014). Learning rich features from RGB-D ima-
ges for object detection and segmentation. CoRR,
abs/1407.5736.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. CoRR, abs/1703.06870.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hu, P. and Ramanan, D. (2016). Finding tiny faces. CoRR,
abs/1612.04402.
Jaderberg, M., Simonyan, K., Zisserman, A., and Kavukcu-
oglu, K. (2015). Spatial transformer networks. CoRR,
abs/1506.02025.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. CoRR, abs/1412.6980.
Li, B., Zhang, T., and Xia, T. (2016). Vehicle detection
from 3d lidar using fully convolutional network. arXiv
preprint arXiv:1608.07916.
Li, J., Liang, X., Shen, S., Xu, T., and Yan, S. (2015). Scale-
aware fast R-CNN for pedestrian detection. CVRR,
abs/1510.08160.
Lin, T., Doll
´
ar, P., Girshick, R. B., He, K., Hariharan, B.,
and Belongie, S. J. (2016). Feature pyramid networks
for object detection. CoRR, abs/1612.03144.
Lindeberg, T. (1990). Scale-space for discrete signals. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 12(3):234–254.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E.,
Fu, C., and Berg, A. C. (2015). SSD: single shot mul-
tibox detector. CoRR, abs/1512.02325.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2015). You only look once: Unified, real-time object
detection. CoRR, abs/1506.02640.
Ren, J., Chen, X., Liu, J., Sun, W., Pang, J., Yan, Q., Tai,
Y.-W., and Xu, L. (2017). Accurate single stage detec-
tor using recurrent rolling convolution. arXiv preprint
arXiv:1704.05776.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Singh, B. and Davis, L. S. (2017). An analysis of
scale invariance in object detection - SNIP. CoRR,
abs/1711.08189.
Yu, F. and Koltun, V. (2015). Multi-scale context aggrega-
tion by dilated convolutions. CoRR, abs/1511.07122.
Detection of Imaged Objects with Estimated Scales
47
