
Pedestrian Intensive Scanning for Active-scan LIDAR
Taiki Yamamoto
1
, Fumito Shinmura
2
, Daisuke Deguchi
3
,
Yasutomo Kawanishi
1
, Ichiro Ide
1
and Hiroshi Murase
1
1
Graduate School of Informatics, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
2
Institutes of Innovation for Future Society, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
3
Information Strategy Office, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
Keywords:
Active-scan LIDAR, Stochastic Sampling, Pedestrian Detection.
Abstract:
In recent years, LIDAR is playing an important role as a sensor for understanding environments of a vehicle’s
surroundings. Active-scan LIDAR is being actively developed as a LIDAR that can control the laser irradiation
direction arbitrary and rapidly. In comparison with conventional uniform-scan LIDAR (e.g. Velodyne HDL-
64e), Active-scan LIDAR enables us to densely scan even distant pedestrians. In addition, if appropriately
controlled, this sensor has a potential to reduce unnecessary laser irradiations towards non-target objects.
Although there are some preliminary studies on pedestrian scanning strategy for Active-scan LIDARs, in the
best of our knowledge, an efficient method has not been realized yet. Therefore, this paper proposes a novel
pedestrian scanning method based on orientation aware pedestrian likelihood estimation using the orientation-
wise pedestrian’s shape models with local distribution of measured points. To evaluate the effectiveness of the
proposed method, we conducted experiments by simulating Active-scan LIDAR using point-clouds from the
KITTI dataset. Experimental results showed that the proposed method outperforms the conventional methods.
1 INTRODUCTION
In recent years, development of autonomous driving
systems and Advanced Driver Assistance Systems
(ADAS) is attracting attention all over the world. Col-
lision avoidance is one of the most important function
in these systems to reduce traffic accidents, and re-
cognition of surrounding environments is indispensa-
ble for developing these systems. Currently, various
types of sensors have been developed and some of
them are commercially available. Among them, LI-
DAR (LIght Detection And Ranging) is now widely
implemented as an in-vehicle sensor for recognizing
the surrounding environment. LIDAR can simultane-
ously measure the distance to target objects and their
reflection intensities by irradiating laser rays and me-
asuring their reflections. Velodyne LiDAR
1
is one of
the most popular LIDAR in recent years, which is
equipped with multiple laser irradiation ports in the
vertical direction as shown in Fig. 1. Irradiating la-
ser rays by rotating the sensor itself in the horizon-
tal direction, it can obtain a point-cloud of 360 de-
grees view uniformly (We call this type of LIDAR as
1
Velodyne LiDAR, Inc. https://velodynelidar.com/
“uniform-scan LIDAR”). In addition, according to the
increase of laser irradiation ports, the vertical density
of the point-cloud can be increased.
Some research groups tackled the problem
of pedestrian detection devising uniform-scan LI-
DARs (Kidono et al., 2011; Behley et al., 2013; Ma-
turana and Scherer, 2015; Wang et al., 2017; Tatebe
et al., 2018; Zhou and Oncel, 2018). Kidono et al.
proposed two kinds of features for recognizing pede-
strians using a dense uniform-scan LIDAR (Kidono
et al., 2011). Their method extracts a slice feature
which is defined by the horizontal and depth sizes of
3D point-clouds in each vertically sliced section for a
rough shape representation. In addition, they propo-
sed an additional feature which is the reflection inten-
sity distribution for representing the material of the
target surface. Based on these features, it is possible
to distinguish pedestrians with non-pedestrians such
as poles. Although their method succeeded to detect
most pedestrians, its accuracy degraded if the target
pedestrian exists in a distant position.
To cope with this problem, Tatebe et al. pro-
posed a voxel representation method applicable to
sparse point-clouds that are obtained from distant tar-
gets (Tatebe et al., 2018). Their method combined
Yamamoto, T., Shinmura, F., Deguchi, D., Kawanishi, Y., Ide, I. and Murase, H.
Pedestrian Intensive Scanning for Active-scan LIDAR.
DOI: 10.5220/0007359903130320
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 313-320
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
313
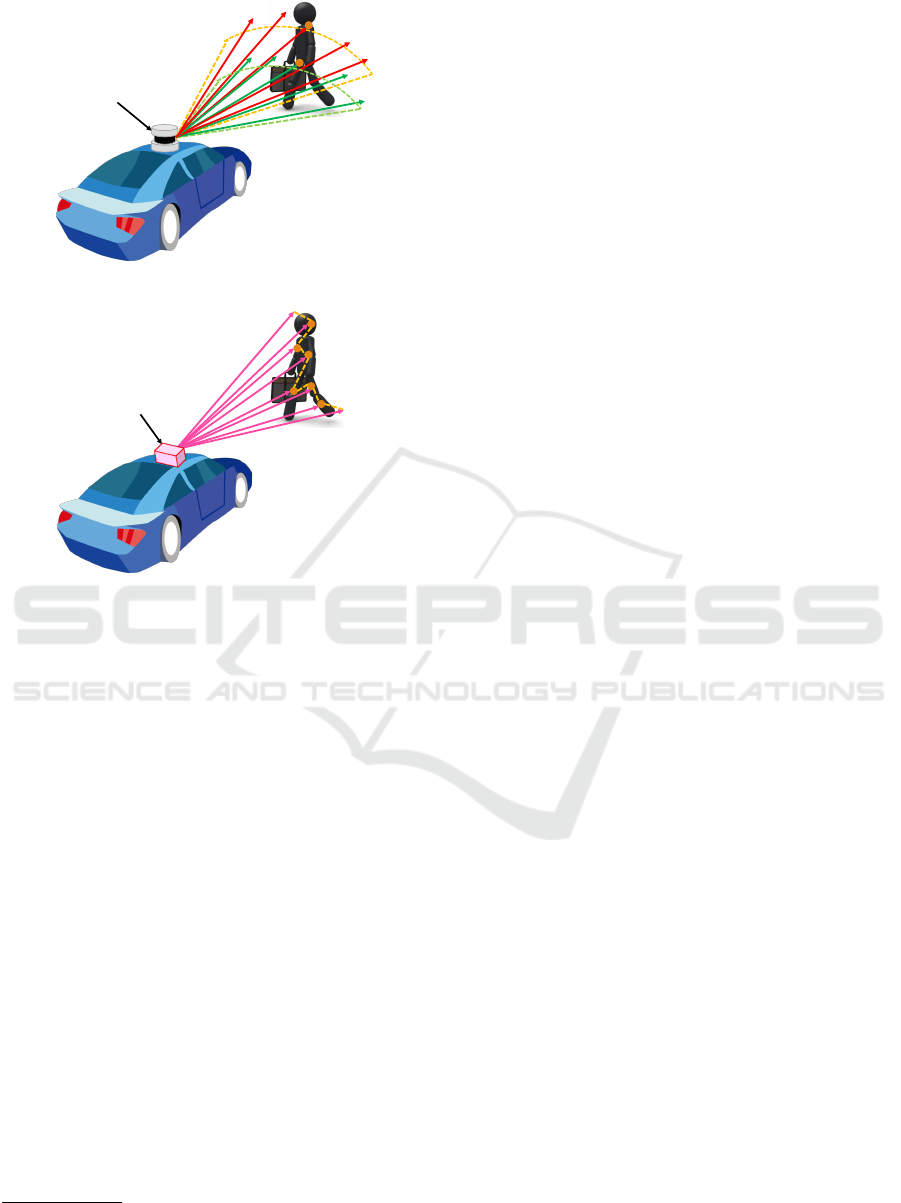
LIDAR
Figure 1: Scanning using a LIDAR.
Active Scan
LIDAR
Figure 2: Scanning using an Active Scan LIDAR.
the voxel representation and 3DCNN for pedestrian
detection. By using the characteristic that the beam
width of an irradiated laser ray increases according to
the distance from the sensor, their method estimates
the distribution of the target point-cloud and uses it for
constructing a voxel representation. Although they
succeeded to detect distant pedestrians, their method
still failed if the density of the target point-cloud is
extremely low. Therefore, improvement of the point-
cloud density will be the key factor to improve the
detection accuracy of distant pedestrians. However, it
is difficult for an uniform-scan LIDAR to increase the
vertical density of the point-cloud because the number
of laser irradiation ports is limited.
Recently, some manufacturers are trying to deve-
lop new types of LIDARs that can control the laser
irradiation direction arbitrary and rapidly as shown
in Fig. 2, such as Blackmore Sensors and Analytics,
Inc
2
. Hereafter, we call these types of sensors as
Active-scan LIDAR. It has a great advantage which
enables us to scan arbitral 3D positions quickly and
programmatically. If we can control it appropriately,
we can expect to obtain a dense point-cloud of dis-
tant pedestrians as same as close pedestrians. Since
2
Blackmore Sensors and Analytics, Inc. https://
blackmoreinc.com/
scanning time increases according to the number of
irradiated laser rays, it is necessary to properly set la-
ser irradiation directions to obtain a dense point-cloud
of pedestrians efficiently.
To solve this problem, we proposed a progres-
sive scan strategy using pedestrian’s shape model to
obtain dense point-clouds from pedestrians (Yama-
moto et al., 2018). Although the observable pede-
strian’s shape changes according to the viewpoint (or
pedestrian’s orientation), the method did not consider
the variations of observable shapes. In addition, since
the method constructed a pedestrian likelihood map
by assuming that all measured points came from pe-
destrians, we did not segregate the measured points
from non-pedestrian objects. Thus, it was difficult to
distinguish a point-cloud of a pedestrian from that of
a non-pedestrian object, such as a pole or a tree that
has a similar shape as a pedestrian but has a different
size.
To overcome the above problems, this paper pro-
poses an orientation-aware pedestrian scanning met-
hod that enables us to scan pedestrians densely with
a small number of laser irradiations. In the propo-
sed method, the pedestrian’s orientation is considered
when constructing his/her shape model. Moreover,
a pedestrian likelihood map is calculated by conside-
ring whether the measured points came from the same
object or not. Here, depth-wise object separation is
used. Finally, we formulate the selection of laser ir-
radiation directions as a problem in a stochastic sam-
pling framework based on the pedestrian likelihood
map.
The contributions of this paper are as follows:
1. Estimation of a pedestrian likelihood map consi-
dering observable pedestrian’s shape variation ac-
cording to his/her orientation.
2. Introduction of depth-wise object separation for
constructing the pedestrian likelihood map con-
sidering whether the measured points came from
the same object or not.
2 IDEAS FOR EFFICIENT
SCANNING
This section describes the basic ideas to efficiently
obtain a dense point-cloud from a pedestrian effi-
ciently devising an Active-scan LIDAR. In order to
select appropriate laser irradiation directions, the pro-
posed method employs a stochastic sampling frame-
work based on a pedestrian likelihood map represen-
ting the existence of pedestrians. Here, the primary
pedestrian likelihood map is constructed by the initial
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
314
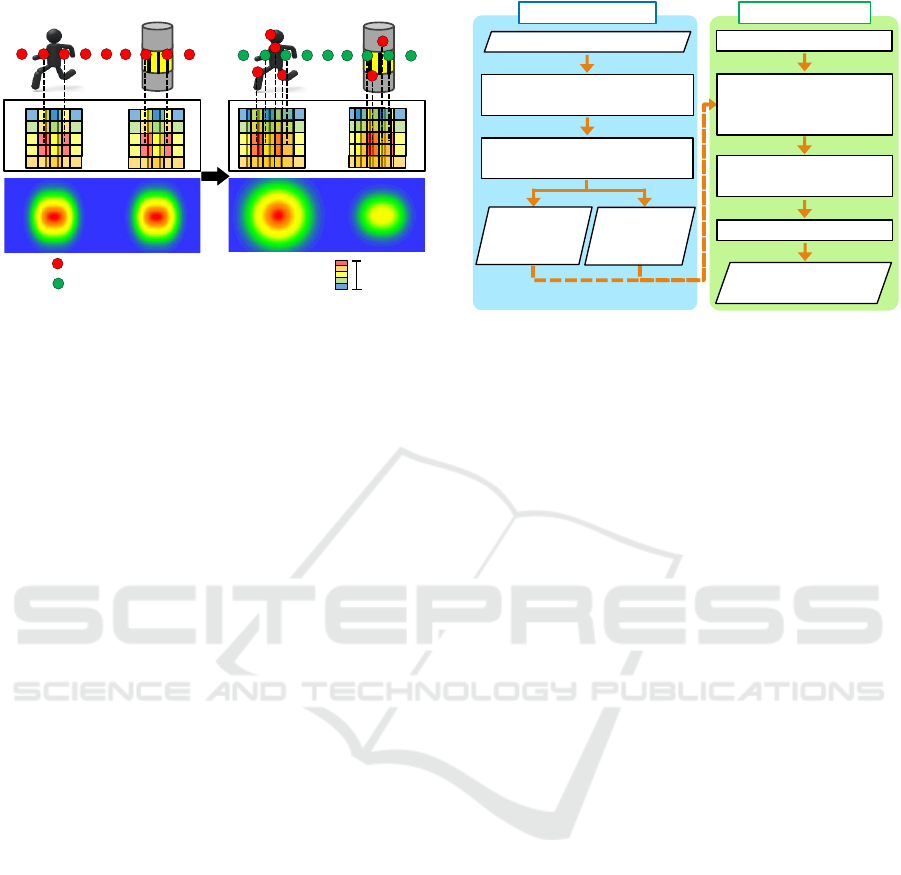
Initial scan
Adaptive scan
Additional points
Previous points
High
Low
Likelihood
Figure 3: Increasing the number of measured points and
updating the pedestrian likelihood map by adaptive scan.
scan, and then the proposed method progressively up-
dates the pedestrian likelihood map based on the me-
asured points by additional laser irradiations where
their directions are set adaptively. By repeating this
step, the pedestrian likelihood map gradually impro-
ves even if the initial point-cloud is sparse, as shown
in Fig. 3.
Here, considering the observable shape variati-
ons among front, back, right, and left orientations,
multiple pedestrian’s shape models are integrated to
compute the pedestrian likelihood map. Futhermore,
the pedestrian likelihood map is calculated by con-
sidering whether the measured points came from the
same object or not. Here, depth-wise object separa-
tion based on the pedestrian’s shape model is applied
to judge whether the points are measured within the
same object or not. Then, the proposed method calcu-
lates the ratio of pedestrian/non-pedestrian points ba-
sed on the above, and uses it for controlling the weig-
hts representing the goodness of fitted pedestrian’s
shape model. Finally, the selection of the next laser
irradiation directions are stochastically sampled from
the pedestrian likelihood map.
Here, the pedestrian likelihood map M
t
(x, y) in the
t-th iteration is calculated as
M
t
(x, y) =
∑
p
p
p∈P
t
∑
θ
F(x, y | p
p
p,θ), (1)
where P
t
is a point-cloud obtained until the t-th scan,
θ is a parameter corresponding to the orientation of
the pedestrian’s model, and F(x, y | p
p
p,θ) is a local pe-
destrian likelihood map when a point p
p
p and θ are gi-
ven. The local pedestrian likelihood map F(x, y | p
p
p,θ)
is calculated as
F(x, y | p
p
p,θ) = G(p
p
p | θ)H(p
p
p | θ)S(x,y | p
p
p,θ), (2)
where G(p
p
p | θ) represents the goodness of the fitted
pedestrian’s shape model around the given p
p
p, H(p
p
p | θ)
Training phase
Pedestrians’ point-clouds
Scanning phase
Generation of depth map and
pedestrian shape prior map
Initial scan
Calculation of
, ,
and AAAAAA
Generation of pedestrian
likelihood map AAA
Adaptive scan
Point-cloud of
scanning result
Depth map
(4 orientations)
Pedestrian
shape prior map
(4 orientations)
Preparation of pedestrians’
point-clouds for each orientation
G(p
p
p | θ)
H(p
p
p | θ)
S(x, y | p
p
p, θ)
M
t
(x, y)
Figure 4: Process-flow of the proposed method.
represents the degree of object isolation around p
p
p, and
S(x, y | p
p
p,θ) is the local probability map representing
pedestrian existence around p
p
p.
Based on the stochastic sampling from the pede-
strian likelihood map M
t
(x, y), the directions of the la-
ser irradiations for the (t + 1)-th scan are calculated.
After completing the (t + 1)-th scan, the (t + 1)-th pe-
destrian likelihood map M
t+1
(x, y) is calculated.
3 ADAPTIVE SCANNING BASED
ON PEDESTRIAN
LIKELIHOOD
This section describes the proposed method to realize
the ideas explained in Section 2. Figure 4 shows the
process-flow of the proposed method. It consists of
the following two phases:
1. Training phase
(a) Preparation of pedestrians’ point-clouds for
each orientation
(b) Generation of depth maps and pedestrian shape
prior maps
2. Scanning phase
(a) Initial scan
(b) Calculation of G(p
p
p | θ), H(p
p
p | θ), and S(x,y |
p
p
p,θ) using depth maps and pedestrian shape
prior maps
(c) Calculation of pedestrian likelihood map
M
t
(x, y)
(d) Adaptive scan based on pedestrian likelihood
map M
t
(x, y)
(e) Repeat 2(b) to 2(e)
In the training phase, depth maps and pedestrian
shape prior maps are constructed from manually ex-
Pedestrian Intensive Scanning for Active-scan LIDAR
315

far
near
Average depth
-7
7
0
1-1
0
19
⋯
⋯
⋯
⋯
(a) Depth map.
high
low
Value
0
19
-7
7
0
1-1
⋯
⋯
⋯
⋯
(b) Pedestrian shape prior
map.
Figure 5: Example of a depth map and a pedestrian shape
prior map for the front orientation.
tracted pedestrians’ point-clouds, and their orienta-
tions are also manually annotated. In the scanning
phase, laser irradiation directions are adaptively se-
lected based on a stochastic sampling from the pe-
destrian likelihood map M
t
(x, y), and those measure-
ment results are used for updating the pedestrian li-
kelihood map M
t+1
(x, y) for the next scan. Details of
each process are described below.
3.1 Training Phase
This section describes the generation of two maps that
represent depth and pedestrian shape prior for each
orientation of pedestrians. The depth maps are used
for calculating G(p
p
p | θ) and H(p
p
p | θ) and the pede-
strian shape prior maps are used to calculate S(x , y |
p
p
p,θ) in Eq. (2). In the following explanation, for sim-
plicity, the position of LIDAR is set at the origin of the
coordinate system, and x-, y-, and z-axes of the coor-
dinate system correspond to the lateral, the vertical,
and the depth directions of the vehicle, respectively.
3.1.1 Preparation of Pedestrians’ Point-clouds
for Each Orientation
First of all, pedestrians’ point-clouds are extracted
from LIDAR data, and then they are classified into
four pedestrian’s orientation (front, back, left, right)
manually. Here, pedestrians’ point-clouds difficult to
be classified into any of the four orientations are dis-
carded.
3.1.2 Calculation of Depth Maps and Pedestrian
Shape Prior Maps
The depth maps and the pedestrian shape priors are
calculated by integrating pedestrians’ point-clouds in
each orientation. Figure 5 shows an example of a
depth map and a pedestrian shape prior map for the
front orientation.
1.5 m
2.0 m
x
y
O
Figure 6: Points are extracted from an area with a size of
1.5 m × 2.0 m.
The first step is the integration of pedestrians’
point-clouds in each orientation. Here, point-clouds
are aligned by shifting each point-cloud so that the
smallest vertical coordinate (y-axis), depth coordi-
nate (z-axis), and the average of the lateral coordi-
nate (x-axis) become zero. After the alignment, as
shown in Fig. 6, points are extracted from an area
with a size of 1.5 m × 2.0 m. Finally, the integra-
ted point-clouds are divided into 15 × 20 cells and
are used for calculating the depth map and the pe-
destrian shape prior map. Here, each cell has a size
of W × W (W = 0.1 m), and is identified using hori-
zontal and vertical indices (i = −7,−6,...,0,...,6, 7,
j = 0, 1, ..., 19).
From the integrated point-clouds, the depth map
of each orientation d(i, j | θ) is calculated as the
average depth in each cell where θ is a parameter
indicating the orientation of the pedestrian’s model.
Also, the pedestrian shape prior map of each orien-
tation s(i, j | θ) is calculated based on the number of
points n(i, j | θ) contained in each cell as
s(i, j | θ) =
n(i, j | θ)
∑
k,ℓ
n(k, ℓ | θ)
if n(i, j | θ) ≥ 10
and |i| ≤ 7
and 0 ≤ j ≤ 19
0 otherwise
(3)
Here, to reduce the effect of noise, if the cell satisfies
n(i, j | θ) < 10, they are treated as d(i, j | θ) = ∞ and
n(i, j | θ) = 0. Finally, d(i, j | θ) and s(i, j | θ) are
used as a depth map and a pedestrian shape prior map,
respectively.
3.2 Scanning Phase
This section describes the adaptive selection of laser
irradiation directions based on a stochastic sampling
from the pedestrian likelihood map. Details on the
calculation process of the pedestrian likelihood map
is also described.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
316

Point to calculate
the pedestrian likelihood
Neighbors of
Surrounding points of
N
1
(p
p
p | θ)
N
2
(p
p
p | θ)
p
p
p
p
p
p
p
p
p
(
(
)
)
Figure 7: Points used for calculating the weights G(p
p
p | θ)
and H(p
p
p | θ).
3.2.1 Initial Scan
As the first step, the initial scan is performed to find a
pedestrian by a small number of laser irradiations to
obtain the rough shape and position of each object in a
scene. Here, the initial number of laser irradiations is
N
0
, and each laser ray is irradiated at a certain interval
along the horizontal direction at a constant height h.
After the initial scan, a horizontally dense point-cloud
at the height h is obtained.
3.2.2 Calculation of Weights and the Local
Probability Map using Depth Maps and
Pedestrian Shape Prior Maps
As the second step, the global pedestrian likelihood
map (Eq. (2)) is calculated by G(p
p
p | θ), H(p
p
p | θ), and
S(x, y | p
p
p,θ) where S(x, y | p
p
p,θ) is the local probability
map around p
p
p, and G(p
p
p | θ) and H(p
p
p | θ) are weights
for controlling the integration of S(x, y | p
p
p,θ).
First of all, based on a point p
p
p ∈ P
t
obtained after
the t-th scan, G(p
p
p | θ) representing the goodness of
the fitted pedestrian’s shape is calculated as
G(p
p
p | θ) =
1
|N
1
(p
p
p | θ)|
∑
q
q
q∈N
1
(p
p
p|θ)
ϕ(p
p
p,q
q
q | θ), (4)
where N
1
(p
p
p | θ) is a set of neighbor points coming
from the same object around p
p
p and |N
1
(p
p
p | θ)| is the
number of points in N
1
(p
p
p | θ). N
1
(p
p
p | θ) is obtained
as
N
1
(p
p
p | θ) = {q
q
q | q
q
q ∈ P
t
,ϕ(p
p
p,q
q
q | θ) ̸= 0,
|q
x
− p
x
| ≤ 0.75 m,0 m ≤ q
y
≤ 2 m,
|q
z
− p
z
| ≤ 1 m},
(5)
where p
p
p = (p
x
, p
y
, p
z
) and q
q
q = (q
x
,q
y
,q
z
). An ex-
ample of neighbor points of a pedestrian around p
p
p
(red point) is shown in Fig. 7 (green points). Here,
ϕ(p
p
p,q
q
q | θ) is a normal distribution whose average and
variance are µ = d(i, j | θ) − d(0,c | θ) and σ
2
, re-
spectively, and is calculated as
ϕ(p
p
p,q
q
q | θ) =
exp
−
((q
z
−p
z
)−µ)
2
2σ
2
if d(i, j | θ) ̸= ∞
0 otherwise
,
(6)
where d(0,c | θ) is the depth of the cell (0, c) con-
taining p
p
p, and d(i, j | θ) is the depth of the cell (i, j)
containing q
q
q. The indices i, j, and c are calculated as
i =
q
x
− p
x
W
, j =
q
y
W
,c =
p
y
W
. (7)
Note that ⌊·⌋ is a floor function defined as
⌊x⌋ = max{n | ∀n ∈ I, n ≤ x}, (8)
where I is a set of whole integers.
H(p
p
p | θ) corresponds to the weight for controlling
the effect of G(p
p
p | θ) based on depth-wise object se-
paration around p
p
p, which is calculated as
H(p
p
p | θ) =
|N
1
(p
p
p | θ)|
|N
2
(p
p
p | θ)|
, (9)
where N
2
(p
p
p | θ) is a set of surrounding points co-
ming from different objects around p
p
p (black points)
and |N
2
(p
p
p | θ)| is the number of points in N
2
(p
p
p | θ).
Here, N
2
(p
p
p | θ) is obtained as
N
2
(p
p
p | θ) = {q
q
q | q
q
q ∈ P
t
,ϕ(p
p
p,q
q
q | θ) = 0,
|q
x
− p
x
| ≤ 0.75 m,0 m ≤ q
y
≤ 2 m,
|q
z
− p
z
| ≤ 1 m}.
(10)
S(x, y | p
p
p,θ) is the local probability map represen-
ting the existence of a pedestrian around p
p
p, which is
calculated as
S(x, y | p
p
p,θ) = s
x − p
x
W
′
,
y
W
′
θ
, (11)
where W
′
is calculated as
W
′
=
W
p
z
. (12)
3.2.3 Calculation of Pedestrian Likelihood Map
As the third step, the pedestrian likelihood map
M
t
(x, y) is generated using the weights G(p
p
p | θ) and
H(p
p
p | θ) and the local probability map S(x, y | p
p
p,θ)
derived in Section 3.2.2.
The pedestrian likelihood map M
t
(x, y) is calcula-
ted by Eqs. (1) and (2).
Pedestrian Intensive Scanning for Active-scan LIDAR
317

3.2.4 Adaptive Scan based on the Pedestrian
Likelihood Map
Finally, the laser irradiation directions are selected for
the next scan. The stochastic sampling referring to the
probability of the existence of pedestrians represented
by the pedestrian likelihood map M
t
(x, y) is applied to
select irradiation directions. Here, the inverse trans-
form sampling (Devroye, 1986) is used as the stochas-
tic sampling. Then, ∆N laser rays are irradiated in the
(t + 1)-th scan.
4 EXPERIMENTS
We conducted the experiment for evaluating the pe-
formance of the proposed method. The following
sections explain details of the experimental settings
and discuss the results.
4.1 Datasets
Since the hardware of an Active-scan LIDAR that can
control the laser irradiation direction arbitrary and ra-
pidly is still under development, we cannot use it for
our experiments. Therefore, here we mimic the beha-
vior of an Active-scan LIDAR by using dense point-
clouds that are obtained by a higher density uniform
scan LIDAR. For training, 400 point-clouds of pede-
strians were collected (100 point-clouds for each pe-
destrian’s orientation). Here, Velodyne LiDAR HDL-
64E was used for obtaining point-clouds in a real-
world environment, and these training data were used
for generating the depth map and the local pedestrian
likelihood map. On the other hand, for testing, we
used the KITTI dataset (Geiger et al., 2012) and the
Active-scan LIDAR was simulated using this dataset.
Note that point-clouds in the KITTI dataset were also
captured by Velodyne LiDAR HDL-64E. We care-
fully selected 600 scenes from the KITTI dataset so
that a pedestrian without occlusion exists in the front
(40
◦
) of the vehicle. Here, all pedestrians existed clo-
ser than 30 m from the LIDAR.
4.2 Evaluation Methods
In this experiment, two methods were compared with
the proposed method: the state-of-the-art previous
method (Yamamoto et al., 2018), the comparative
method, and the proposed method. The previous met-
hod (Yamamoto et al., 2018) does not consider pe-
destrian’s orientation in Eq. (1) and does not use the
effect of the term of H(p
p
p | θ), that is, Eq. (9) is repla-
ced with H(p
p
p | θ) = 1. The comparative method con-
Table 1: Evaluation methods.
Prev. Comp. Prop.
Pedestrian’s orientation X X
Depth-wise separation X
siders pedestrian’s orientation θ which is a element
of contributions but assumes H(p
p
p | θ) = 1. The pro-
posed method uses all contributions presented in this
paper. Other processes are exactly the same among all
methods. Table 1 summarizes the conditions of each
method.
The following parameters were used in the expe-
riments:
• Number of laser irradiations in the initial scan:
N
0
= 300.
• Number of laser irradiations in each iteration
(adaptive scan): ∆N = 100.
• Number of iterations: 9 iterations.
• Total number of laser irradiations: N
m
= 1, 200.
• Vertical position of the initial scan: h = 1.0 m.
• Value of σ in Eq. (6): σ = 0.1 m.
These parameters were determined experimentally.
4.3 Evaluation Criteria
To evaluate the performance of each method, the fol-
lowing two evaluation criteria were employed:
The first criteria is the number of hit points N
hit
that corresponds to the number of measured points
from a target pedestrian. The higher this criterion is,
the more the method can scan pedestrians adaptively.
The second criteria is the number of detected
pedestrians N
detect
that are composed of number of
points above a threshold. The threshold is set to a
value from 0 to 100 in a increment of 10. In order
for the pedestrian detection method to appropriately
classify each point-cloud into a pedestrian and a non-
pedestrian, it is desirable that each point-cloud con-
sists of a large number of points. Therefore, the hig-
her this criterion is at a high threshold, the easier it is
to detect pedestrians.
4.4 Results & Discussions
Figure 8 shows the results of all methods in each eva-
luation criterion.
As seen in the graphs, we can say that the com-
parative method outperforms the previous method in
the criterion of detected pedestrians though the im-
provement of the number of hit points is minor. From
this result, the use of orientation aware pedestrian li-
kelihood map proposed in this paper can slightly im-
prove the efficiency in the scan of pedestrians.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
318
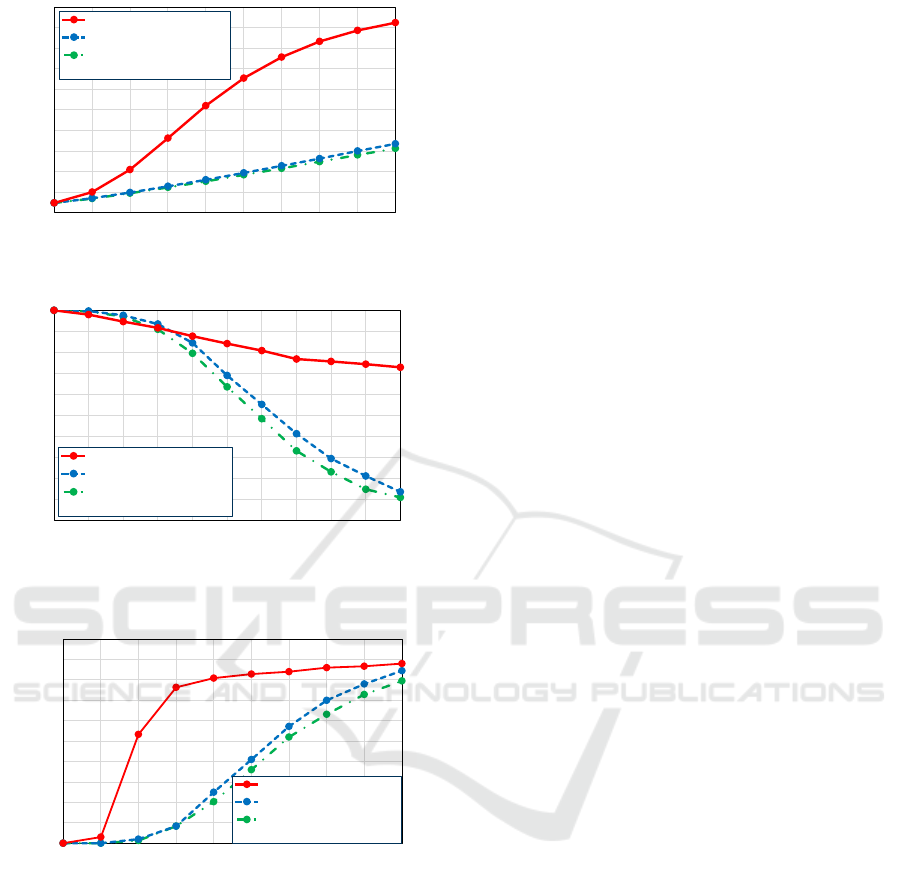
0
20
40
60
80
100
120
140
160
180
200
300 400 500 600 700 800 900 1,000 1,100 1,200
Number of hit points [point]
Number of laser irradiation [point]
Previous method
Comparative method
Proposed method
(Yamamoto et al., 2018)
(a) Hit points.
0
60
120
180
240
300
360
420
480
540
600
0 10 20 30 40 50 60 70 80 90 100
Number of detected pedestrians [person]
Threshold for pedestrian detection [point]
Previous method
Comparative method
Proposed method
(Yamamoto et al., 2018)
(b) Detected pedestrians.
Figure 8: Experimental results by two evaluation metrics.
0
60
120
180
240
300
360
420
480
540
600
300 400 500 600 700 800 900 1,000 1,100 1,200
Number of detected pedestrians [person]
Number of laser irradiation [point]
Previous method
Comparative method
Proposed method
(Yamamoto et al., 2018)
Figure 9: Transition of detected pedestrians using 40 points
as the threshold.
On the other hand, the proposed method outper-
forms both the comparative and the previous methods
in all evaluation criteria. Moreover, Figure 9 shows
the transition of detected pedestrians when the thres-
hold is set to 40 points. As seen in the graph, the
proposed method is able to obtain point-clouds from
pedestrians with less number of iteration than the ot-
her two methods.
Since the comparative and the previous methods
use average integration of the local likelihood map
by assuming that all measured points come from the
same object, the resultant pedestrian likelihood map
is blurred. On the other hand, the proposed method
controls the integration weight of the local likelihood
map according to the ratio of measured points coming
from the same object judged by depth-wise object se-
paration. Therefore, the proposed method could ge-
nerate the pedestrian likelihood map intensively fo-
cusing on pedestrian regions, and the performance of
the scan could be significantly improved. From these
results, we confirmed the effectiveness of the combi-
nation of orientation aware pedestrian likelihood map
and depth-wise object separation for improving the
efficiency of the scan.
Figure 11 shows the results of the proposed met-
hod and the previous method applied to the scene
shown in Fig. 10. From these results, we confirmed
that the proposed method could efficiently control la-
ser directions focusing on a pedestrian, and could
achieve less laser irradiations than the previous met-
hod to dense obtain point-clouds from pedestrians.
5 CONCLUSIONS
In this paper, we proposed an efficient pedestrian
scanning method based on the pedestrian likelihood
map constructed by integrating an orientation aware
local pedestrian likelihood map. Here, the local pede-
strian likelihood map is integrated according to the
weight related to the ratio of measured points that
comes from the same object. In the proposed met-
hod, pedestrian scanning is formulated as a problem
of stochastic sampling from the pedestrian likelihood
map, where pedestrians can be scanned progressively
by iterative scanning and map update.
To evaluate the performance of the proposed met-
hod, we conducted experiments by simulating the me-
chanism of an Active-scan LIDAR using the KITTI
dataset. As a result, the proposed method outperfor-
med comparative methods including the state-of-the-
art method.
Future work will include an improvement of the
local pedestrian likelihood map calculation, the deve-
lopment of a method to crop the pedestrians’ point-
clouds from point-clouds obtained by the proposed
method, and experiments with larger datasets.
ACKNOWLEDGEMENTS
Parts of this research were supported by MEXT,
Grant-in-Aid for Scientific Research.
Pedestrian Intensive Scanning for Active-scan LIDAR
319

Figure 10: Sample scene in the KITTI dataset (Geiger et al., 2012).
⋯ ⋯ ⋯⋯
P
0
P
2
P
4
P
9
(a) Proposed method.
P
0
P
2
P
4
P
9
⋯ ⋯ ⋯⋯
(b) Previous method (Yamamoto et al., 2018).
Figure 11: Scanning results by the proposed method and the previous method (Yamamoto et al., 2018) applied to the scene in
Fig. 10. Pink dots represent pedestrians while white dots represent other objects. P
t
is a set of points obtained after the t-th
scan.
REFERENCES
Behley, J., Steinhage, V., and Cremers, A. (Nov. 2013).
Laser-based segment classification using a mixture of
bag-of-words. In Proc. 2013 IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems, pages 4195–4200.
Devroye, L. (1986). Non-uniform random variate genera-
tion. Springer.
Geiger, A., Lenz, P., and Urtasun, R. (June 2012). Are we
ready for autonoumous driving? The KITTI vision
benchmark suite. In Proc. 2012 IEEE Conf. on Com-
puter Vision and Pattern Recognition, pages 3354–
3361.
Kidono, K., Miyasaka, T., Watanabe, A., Naito, T., and
Miura, J. (June 2011). Pedestrian recognition using
high-definition LIDAR. In Proc. 2011 IEEE Intelli-
gent Vehicles Symposium, pages 405–410.
Maturana, D. and Scherer, S. (Sept. 2015). VoxNet: A 3D
convolutional neural network for real-time object re-
cognition. In Proc. 2015 IEEE/RSJ Int. Conf. on In-
telligent Robots and Systems, pages 922–928.
Tatebe, Y., Deguchi, D., Kawanishi, Y., Ide, I., Murase, H.,
and Sakai, U. (Jan. 2018). Pedestrian detection from
sparse point-cloud using 3DCNN. In Proc. 2018 Int.
Workshop on Advanced Image Technology, pages 1–4.
Wang, H., Wang, B., Liu, B., Meng, X., and Yang, G. (Feb.
2017). Pedestrian recognition and tracking using 3D
LIDAR for autonoumous vehicle. In J. of Robotics
and Autonoumous Systems, volume 88, pages 71–78.
Yamamoto, T., Shinmura, F., Deguchi, D., Kawanishi, Y.,
Ide, I., and Murase, H. (Jan. 2018). Efficient pede-
strian scanning by active scan LIDAR. In Proc. 2018
Int. Workshop on Advanced Image Technology, pages
1–4.
Zhou, Y. and Oncel, T. (June 2018). VoxelNet: End-to-end
learning for point cloud based 3D object detection. In
Proc. 2018 IEEE Conf. on Computer Vision and Pat-
tern Recognition, pages 4490–4499.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
320
