
Exploration of Deep Learning-based Multimodal Fusion for Semantic
Road Scene Segmentation
Yifei Zhang, Olivier Morel, Marc Blanchon, Ralph Seulin, Mojdeh Rastgoo and D
´
esir
´
e Sidib
´
e
ImViA Laboratory EA 7535, ERL VIBOT CNRS 6000, Universit
´
e de Bourgogne Franche-Comt
´
e, France
Keywords:
Semantic Segmentation, Multimodal Fusion, Deep Learning, Road Scenes.
Abstract:
Deep neural networks have been frequently used for semantic scene understanding in recent years. Effective
and robust segmentation in outdoor scene is prerequisite for safe autonomous navigation of autonomous vehi-
cles. In this paper, our aim is to find the best exploitation of different imaging modalities for road scene
segmentation, as opposed to using a single RGB modality. We explore deep learning-based early and later
fusion pattern for semantic segmentation, and propose a new multi-level feature fusion network. Given a pair
of aligned multimodal images, the network can achieve faster convergence and incorporate more contextual
information. In particular, we introduce the first-of-its-kind dataset, which contains aligned raw RGB images
and polarimetric images, followed by manually labeled ground truth. The use of polarization cameras is a sen-
sory augmentation that can significantly enhance the capabilities of image understanding, for the detection of
highly reflective areas such as glasses and water. Experimental results suggest that our proposed multimodal
fusion network outperforms unimodal networks and two typical fusion architectures.
1 INTRODUCTION
Semantic segmentation is one of the main challen-
ges in computer vision. Along with the appearance
and development of Deep Convolutional Neural Net-
work (DCNN) (Krizhevsky et al., 2012), the trained
model can predict which class each pixel in the in-
put images belongs to. By learning from massive
data sets of diverse samples, this method achieves a
good performance on end-to-end image recognition.
Robust and accurate scene parsing of outdoor envi-
ronments paves the way towards autonomous naviga-
tion and relationship inference. Compared with ind-
oor scenes, off-road perception is more challenging
due to dynamic and complex situations. The outdoor
environment may easily change in different time slots
with light or color variations. Even in structured envi-
ronments, for instance on urban roads, there are still
several challenges such as the detection of glass and
muddy puddles.
Most existing datasets and methods for outdoor
scene semantic segmentation are mainly based on
RGB camera. They are only well acceptable in ge-
neral conditions excluding complex environment and
small amount of samples. To develop additional
practical solutions, one of the main challenges is data
fusion from multi-modalities. Therefore, considering
(a) RGB image (b) Polarimetric image
(c) Kinect image
(d) Ground Truth
Figure 1: Multimodal images in POLABOT dataset.
the RGB modality as a kind of imperfect sensor, we
attempt to fuse the complementary feature informa-
tion of the same scene from other modalities. Actu-
ally, several modalities are ubiquitous in robotic sys-
tems, such as RGB-D, LIDAR, near infrared sensor,
etc. Figure 1 shows the multimodal images of our
POLABOT dataset.
In this work, we use a polarimetric camera, as
a complementary modality, to provide a richer des-
cription of a scene. Polarization of light radiation
336
Zhang, Y., Morel, O., Blanchon, M., Seulin, R., Rastgoo, M. and Sidibé, D.
Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation.
DOI: 10.5220/0007360403360343
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 336-343
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

has more general physical characteristic than intensity
and color (Wolff, 1997). We can figure out that win-
dows of a building, the asphalt road, and the puddle of
water have reflected polarizations (Walraven, 1977).
Plenty of research have demonstrated that the use of
polarization camera can significantly enhance the ca-
pabilities of scene understanding, especially for re-
flective areas (Harchanko and Chenault, 2005).
Over the past few years, a variety of deep learning-
based end-to-end approaches have been proposed.
One factor that increased the popularity of deep le-
arning is the availability of massive data. In the
case without large amount of samples, we attempt to
acquire more features of the same scene using several
modalities. To some degree, an effective encoding of
complementary information enables learning without
the need for massive data, therefore the use of small-
scale dataset can also lead to good performances. Re-
cent works have shown promising results in extracting
and fusing features from complementary modalities
at pixel-level. The idea is to separately or jointly train
the model using data from different sensors and in-
tegrate them into a composite feature at early or late
stage.
In this paper, we firstly review the existing fusion
methods and datasets in section 2. Next, in section 3,
we explore the two typical early and late fusion archi-
tectures, and propose our multi-stage Complex Moda-
lity network (CMnet), which has an encoder-decoder
pattern and takes advantage of the state-of-art seg-
mentation network. We evaluate the performances of
the different fusion schemes using two different data-
sets in section 4. In particular, we introduce a new
dataset, which to the best of our knowledge is the
first multimodal dataset containing polarimetric ima-
ges. Finally, the paper ends with concluding remarks
in section 5.
2 RELATED WORK
In this section, we go through some of semantic seg-
mentation methods, more details can be found in the
review of (Garcia-Garcia et al., 2017). Then we sum-
marize existing deep learning-based fusion schemes
and various outdoor scene multimodal datasets.
Deep Neural Network. Before deep learning achie-
ved its current tremendous success, traditional com-
puter vision methods were widely used, these met-
hods are base on classifiers which operates on fixed-
size feature inputs and a sliding-window. From the
beginning with FCN (Long et al., 2015), the end-to-
end fully convolutional network has become one of
the most popular models for image segmentation. Re-
cent years have witnessed a series of new encoder-
decoder architectures along this line, including Seg-
Net (Badrinarayanan et al., 2017), and U-Net (Ron-
neberger et al., 2015). Followed by the dilated con-
volutions proposed in (Yu and Koltun, 2015). Based
on this technology, the series of DeepLab (Chen et al.,
2014; Chen et al., 2018a; Chen et al., 2018b) achieves
the state of the art performance in semantic segmen-
tation.
Multimodal Fusion Architecture. Benefiting from
the improvement of unimodal neural network, excel-
lent progress has been made on multimodal fusion
architecture. Several common spectral sensors, such
as RGB-D and near-infrared sensor, were applied to
pixel-level data fusion of the same scene. For ex-
ample, FuseNet (Hazirbas et al., 2016) and multi-
view neural network (Ma et al., 2017) were propo-
sed to incorporate complementary depth information
into RGB segmentation framework. These fusion net-
works are based on an early fusion architecture, the
feature maps from depth are constantly fused into the
RGB branch in the encoder part.
Besides, a late fusion based model, Long Short-
Term Memorized Context Fusion, also called LSTM-
CF, was proposed by (Li et al., 2016). This network
extracts multimodal features from depth and photo-
metric data sources separately, then concatenates the
feature map at three different scales. Another simple
late fusion network (Eitel et al., 2015) was proposed
for robust RGB-D object recognition. Furthermore,
a convoluted mixture of deep experts technique (Va-
lada et al., 2016a) was used in the late fusion architec-
ture. These early and late fusion architectures were
studied and applied to various scenarios and fields,
for instance, forested environments navigation (Va-
lada et al., 2016b), urban driving assistance (Jaritz
et al., 2018).
Datasets. Along with the development of compu-
ter vision techniques, a series of high-quality out-
door scene datasets have appeared, such as Cam-
Vid (Brostow et al., 2008b; Brostow et al., 2008a),
Cityscapes (Cordts et al., 2016), etc. They are widely
used in outdoor semantic scene understanding. In ad-
dition, some research institutes publish their scenario-
based multimodal dataset. For instance, KAIST da-
taset (Hwang et al., 2015) is a multi-spectral pede-
strian dataset of real traffic scenes, which was col-
lected by a co-aligned RGB/Thermal camera, RGB
stereo, 3D LiDAR and inertial sensors. Especially for
semantic segmentation, there is KITTI dataset (Gei-
ger et al., 2013) which contains high-resolution RGB
data, grayscale stereo cameras data, and 3D point
cloud; Freiburg Multi-spectral Forest dataset (Valada
et al., 2016b) is also a multi-spectral dataset for fo-
Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation
337
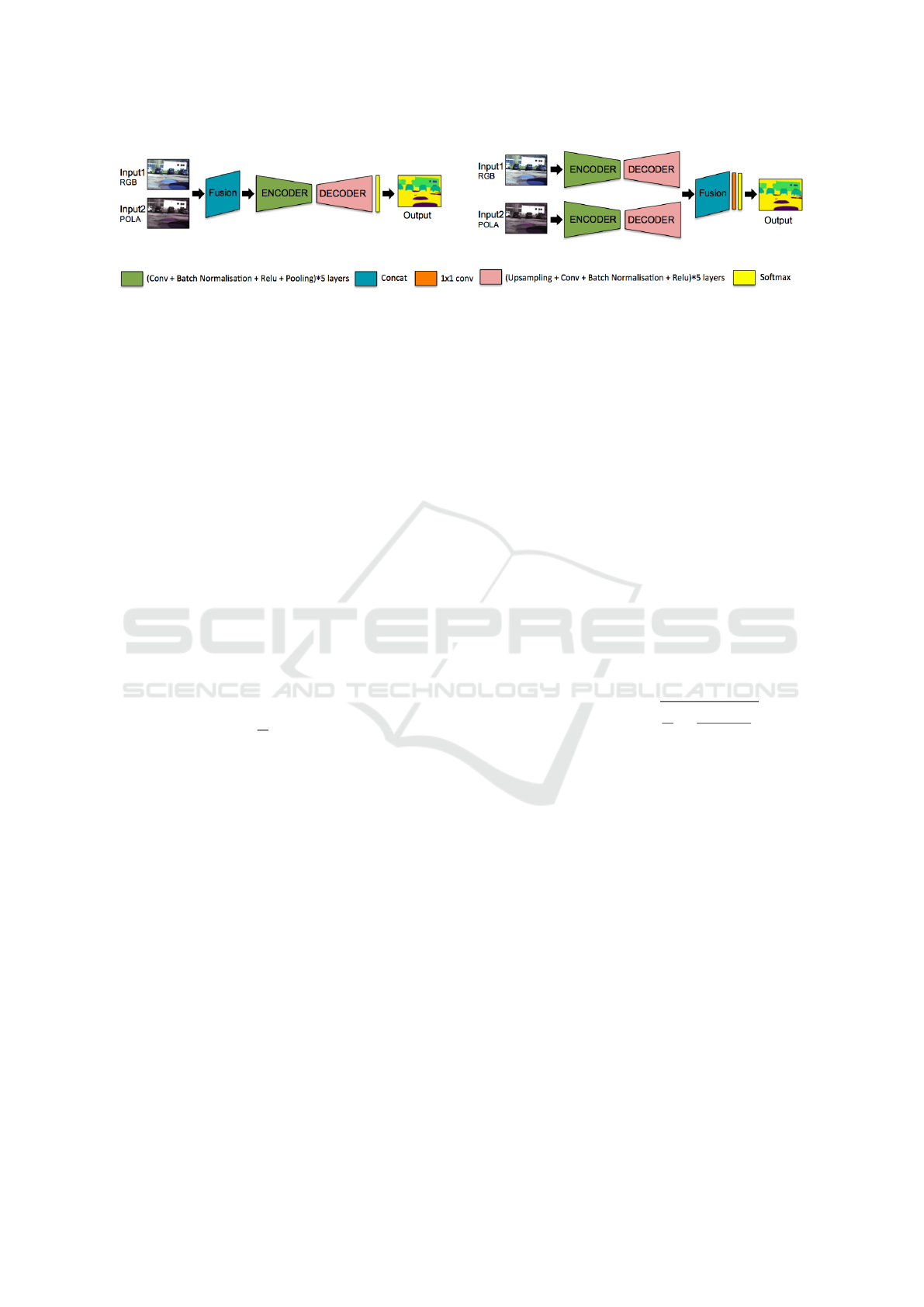
(a) early fusion
(b) late fusion
Figure 2: Early fusion and Late fusion architectures comparison.
rested environment semantic segmentation, it con-
tains RGB, Depth, NIR, Near-Infrared, Red, Green
(NRG), Enhanced Vegetation Index (EVI), and Nor-
malized Difference Vegetation Index (NDVI) images.
However, none of these datasets contains polarimetric
data.
3 MULTIMODAL FUSION
In this section, we describe the fusion architectures
for multi-modalities and the training procedure in de-
tails. In essence, the process of training is to mi-
nimize the error while regularizing the parameters.
Let S = {(X
n
, y
n
)|n = 1, 2, ..., N} be a set of N trai-
ning examples, where X
n
is the feature vector of n-
th example extracted from different modalities, and
y
n
∈ {1, 2, ..., c} is the corresponding segmentation
class. Then the training problem can be framed as
an optimization one, which can be formulated as:
θ
∗
= argmin
θ
1
N
N
∑
i=1
L(y
n
, f (x
n
;θ)), (1)
where the loss is computed as L(u, y) = −
∑
k
y
k
logu
k
.
Then we can use, for example, gradient descent algo-
rithm to find local minimum.
3.1 Fusion Architectures
In this part, we describe two typical fusion strategies,
namely early fusion and late fusion. The two simple
structures, as well as their extensions, are widely used
for deep learning-based fusion. Here we use SegNet
as baseline network to construct such architectures.
SegNet has a classical Encoder-Decoder structure fol-
lowed by a Softmax classifier. The encoder is a regu-
lar convolutional neural network which contains five
layers. Each layer extracts local features, normalizes
the data distribution, obtains sparse representations by
means of convolution, batch normalization and ReLU
accordingly. Afterwards, pooling is used for downs-
ampling the feature map and propagate spacial invari-
ant features. Correspondingly, the decoder unsamples
the shrunk feature map and recover the lost spatial in-
formation to full-sized segmentation.
3.1.1 Early Fusion
As shown in Figure 2(a), the early fusion architec-
ture has a unitary neural network, fusion takes place
before passing into the encoder. Assume that both
inputs (for example one RGB image and one polari-
metric image) have size 3×H×W, then fused frame
will be 6×H×W. So we also call this sort of fusion
architecture as channel fusion.
This fusion architecture, combining features be-
fore training, seems simple and light. However, it is
also more likely to over-fit. To see why, let consider
the model’s complexity. Let H be a family of functi-
ons taking values in {−1, +1} with VC-dimensions
d
vc
(Vapnik, 1998). Then, for any δ > 0 and all h ∈ H,
the VC-dimension bound (Mohri et al., 2012) can be
derived with a high probability:
E
out
(h) ≤ E
in
(h) +
r
8
N
ln(
4(2N)
d
vc
δ
), (2)
where E
out
denotes out-of-sample error, E
in
denotes
in-sample error, and N denotes the data points that the
hypothesis space can shatter the set. As the amount
of input’s dimensions increases, so does the VC-
dimensions. Then the model complexity Ω(N, H, δ)
rises along with the increase of VC-dimensions. As
a result, larger data samples should be fed to fit the
deep neural model for less in-sample error. In other
words, in the case that samples are not huge enough,
the model may be easier to over-fit.
3.1.2 Late Fusion
Figure 2(b) shows the late fusion architecture which
was used in this paper. It has two separated branches
of network, with each branch trained to extract featu-
res from a special modality. Fusion takes place after a
series of downsampling. Assuming that the two fea-
ture maps have size 1×H×W, after concatenation, the
resulting feature will be 2×H×W. Then a 1×1 convo-
lution is applied to reduce the number of channels.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
338
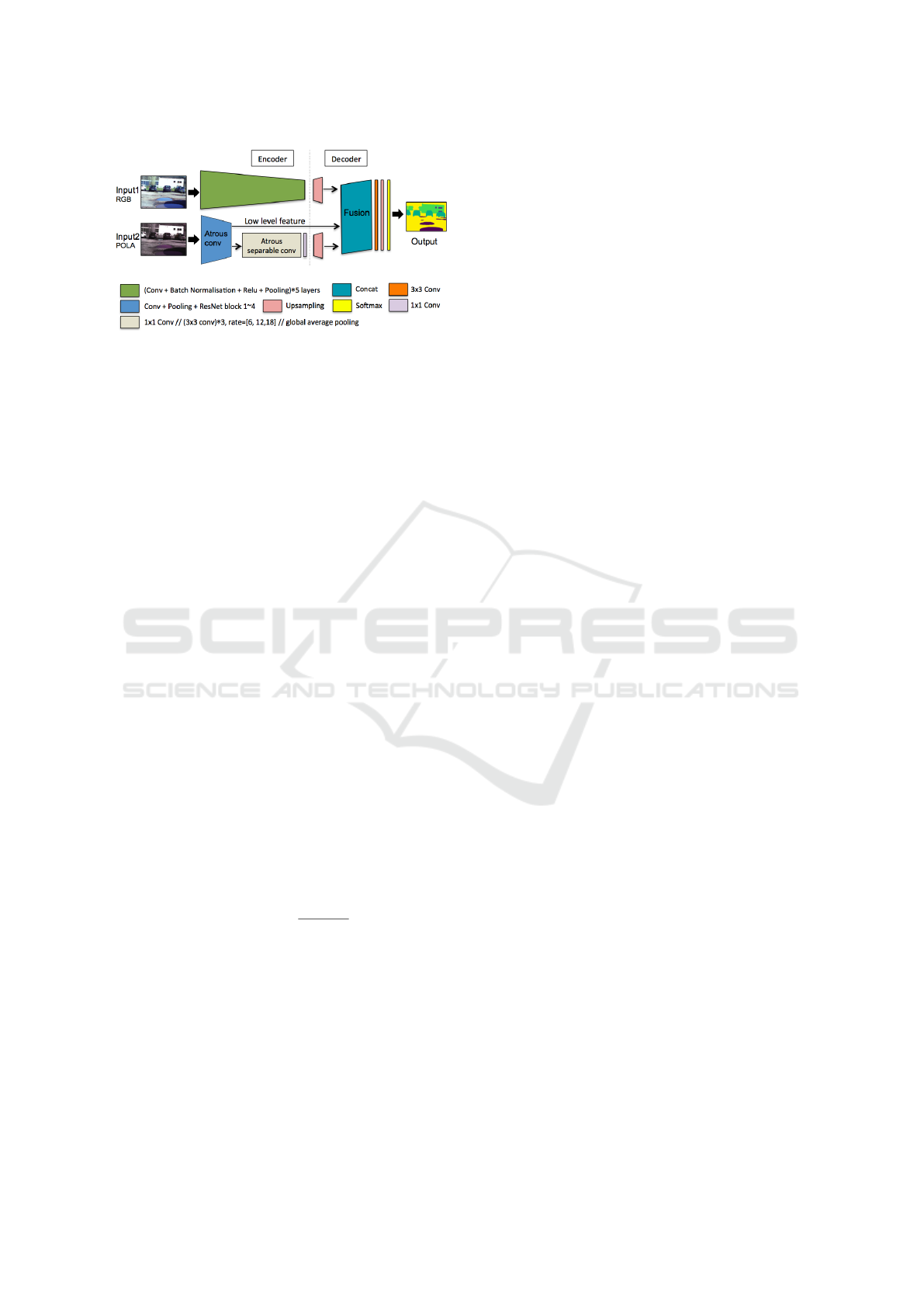
Figure 3: Our proposed fusion architecture: CMnet for mul-
timodal fusion based on late fusion architecture.
This approach has the advantages that each net-
work computes weights separately while encoding.
Compared with early fusion, to some extent, it may
reduce the difficulty of model fitting and yield a bet-
ter outcomes. Furthermore, thanks to the scalability
and flexibility of this architecture, the model can be
designed in accordance with requirements and easily
extend to multi-inputs without a large dimension in-
crease.
3.2 Proposed Fusion Model
We propose a new approach for multimodal data fu-
sion, Complex Modality Neural Network (CMnet),
based on late fusion architecture since it has afore-
mentioned merits.
Let S = {(X
n
, y
n
)|n = 1, 2, ..., N} denotes the trai-
ning set, and X
n
= {x
a
, x
b
} is the training example,
where x
a
and x
b
are the vector of input images from
modality a and b, respectively. Also let M
1
, and M
2
,
denote the map between the input and output of the
first, and second branch of the encoder-decoder net-
work, respectively. Then the output of the fusion mo-
dule can be written as:
ˆy
n
= f (X
n
) = softmax[W ∗(M
1
(x
a
) + M
2
(x
b
))], (3)
where, W is a series of convolution kernels for upsam-
pling. The softmax function is introduced to represent
the categorical distribution, and is defined as:
softmax(z)
j
=
e
z
j
∑
K
k=1
e
z
k
, (4)
where z = [z
1
, . . . , z
K
]
T
.
Figure 3 presents the whole architecture of CM-
net. It has an Encoder-Decoder structure and two se-
parated branches. The encoder is used for mapping
raw inputs to feature representations. The decoder in-
tegrates three feature maps, then recovers the feature
representation to final segmentation results. That is
a reliable method to extract different modality featu-
res and recover sharp object boundaries for end-to-
end segmentation.
On the one hand, the branch for RGB modality
incorporates a SegNet-like encoder. By copying the
indices from max-pooling, it can capture and store
boundary information in the encoder feature maps be-
fore sub-sampling. We keep this strength to make the
network more memory efficient and improve boun-
dary delineation. On the other hand, we focus on the
feature quality of the extra modality. Other modalities
can provide rich complementary information on low
level appearance features.
However, how to captures rich contextual infor-
mation from extra modality is a challenging task.
We refer to the state-of-the-art segmentation network
Deeplab v3+ (Chen et al., 2018b), which uses a new
pooling method named ASPP (Atrous Spatial Py-
ramid Pooling) to incorporate the multi-scale contex-
tual information. We apply this network structure
as the other branch’s encoder for the complementary
modality. The first upsampling stage is subsequently
applied to each branch to recover the feature represen-
tation to the same fusion size, then we fuse these three
feature maps, which contains high-level and low-level
multimodal features information simultaneously. The
second upsampling stage and softmax are applied to
the fused feature map, which produces the final re-
sults.
4 EXPERIMENTAL RESULTS
In this section, we evaluate the different fusion mo-
dels, and report a series of results on two datasets.
One is the publicly available Freiburg multispectral
forest dataset (Valada et al., 2016b), and the second
one is a new multimodal dataset containing polarime-
tric and RGB data, called POLABOT dataset. In this
work, all the networks are implemented based on Py-
torch framework with a Nvidia Titan Xp graphics pro-
cessing unit (GPU) acceleration. The input data was
randomly shuffled after each epoch. We initialize the
learning rate as 0.0001 and use the contraction seg-
ments of pre-trained VGG-16 model and ResNet-101
as encoders. Then we fine-tuned the weights of the
decoders until convergence.
4.1 POLABOT Dataset
As shown in Figure 4, we collected multimodal ima-
ges using a mobile robot platform equipped with four
cameras: the RGB camera (IDS Ucam), a polarime-
tric camera (PolarCam), a depth camera (Kinect 2.0),
and a near-infrared camera. Our raw dataset con-
tains over 700 multi-modalities images. All the ima-
ges were acquired, synchronized and calibrated using
Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation
339

Figure 4: Mobile robot platform used for the acquisition of
the POLABOT dataset. It is equipped with the IDS Ucam,
PolarCam, Kinect 2 and a NIR camera.
the Robot Operating System (ROS) framework. Our
benchmark also contains 175 images with pixel level
ground truth annotations which were generated manu-
ally. These images have been dispatched into 8 clas-
ses: unlabeled, sky, water, windows, road, car, buil-
dings and others. Benefiting from the use of a pola-
rimetric camera, our mobile robot platform is more
capable of discerning on windows, water and other
reflective areas. That allows us to do much more ex-
ploratory research on polarimetric images in seman-
tic scene understanding domain. In this paper, we
use aligned RGB and polarimetric images as inputs
to train the fusion models.
For integrating the acquired images, we apply
an automatic homographic method to image align-
ment (Moisan et al., 2012). This method allows to
transform the RGB images with respect to the pola-
rimetric images, and crop to the intersecting regions
of interest. Moreover, as deep learning models need
large data sets of diverse examples, a certain amount
of data should be guaranteed. For this reason, we em-
ploy geometric data augmentations to increase the ef-
fective number of training samples, including rotation
and flipping. Data augmentation and multimodal data
fusion help to train deep neural networks on small
scale datasets.
4.2 Experimental Evaluation
4.2.1 Freiburg Multispectral Forest Dataset
We train the segmentation architectures on the pu-
blic Freiburg Forest dataset first. This dataset was
collected by a modified RGB dashcam with NIR-cut
filter in outdoor forested environment. It consists of
over 15,000 raw images, and 325 images with pixel
level ground truth annotations for 6 classes, which are
the sky, trail, grass, vegetation, obstacle and others. In
Table 1: Performance of segmentation models on Frei-
burg Multispectral Forest dataset. EF, LF refer to early fu-
sion and late fusion respectively. We report pixel accuracy
(PA), mean accuracy (MA), mean intersection over union
(MIoU), frequency weighted IoU (FWIoU) as metric to eva-
luate the performance.
PA MA MIoU FWIoU
RGB 92.07 89.56 79.87 86.19
EVI 92.05 88.76 79.66 85.82
EF 91.80 88.02 78.95 85.67
LF 92.26 89.52 80.36 86.34
CMnet 93.02 90.06 81.64 87.68
Table 2: Comparison of deep unimodal and multimodal fu-
sion approaches by class. We report MIoU as metric to eva-
luate the performance.
Road Grass Veg/Tree Sky
RGB 77.18 73.47 89.78 80.66
EVI 81.55 73.50 88.08 76.39
EF 80.78 74.07 86.90 78.68
LF 82.27 75.66 88.54 77.68
CMnet 81.01 76.55 90.64 83.25
this unstructured forest environment, Enhanced Vege-
tation Index(EVI) was proposed to improve sensiti-
vity to high biomass regions and vegetation monito-
ring. It shows stronger capacities on feature represen-
tation than NIR in the previous work. To extract more
accurate information, here in our case, we select EVI
images as the second modality input besides the visi-
ble input.
We crop the RGB and EVI images as size
3×256×256, and use them as inputs correspondingly.
We report several metrics to assess segmentation mo-
dels: pixel accuracy (PA), mean accuracy (MA), mean
intersection over union (MIoU), frequency weighted
IoU (FWIoU). They are frequently used in semantic
segmentation domain.
The results shown in Table 1 show that segmenta-
tion using RGB images yields better results than EVI
images on the whole. This shows that RGB images
provide better high-level features while training. For
fusion architectures, late fusion methods outperform
channel fusion method as we analyzed in the previous
section. Our network yields around 1% ∼ 2% com-
prehensive improvements comparing with other met-
hods.
The results in Table 2 demonstrate the evaluations
by class. We report the main four classes as Road,
Grass, Veg/Tree and Sky. For uni-modality network,
we can find that EVI shows good performance on
Road and Grass classes, and RGB modality has a sig-
nificant advantage on Sky class, which is susceptible
to lighting changes. Moreover, the fusion architec-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
340
Table 3: Segmentation performance on POLABOT dataset
Input Methods PA MA F1 MIoU
RGB SegNet 87.76 81.44 87.67 64.79
POLA SegNet 90.51 84.15 90.77 68.58
RGB E-Fusion 90.25 85.06 90.64 69.48
+ L-Fusion 90.02 84.28 90.11 68.81
POLA CMnet 90.70 85.90 90.92 72.59
ture outperforms uni-modality scheme by integrating
complementary multimodal information. In particu-
lar, our CMnet model achieved a remarkable results
on segmentation comparing with other fusion archi-
tectures, espe.
A note about the results is that Freiburg Forest da-
taset was collected from a series of frames, the scene
of these frames are homogenized, the structure of
each class in these images doesn’t fluctuate a lot. The
specialization of certain scenes may also reduce the
demand on the number of samples.
Some segmentation results on the Freiburg dataset
are shown in Figure 5.
4.2.2 POLABOT Dataset
In the following part, we report several experimental
results on our POLABOT dataset. The metrics shown
in Table 3 correspond to pixel accuracy (PA), mean
accuracy (MA), F1 score (F1) and mean intersection
over Union (MIoU).
We process the RGB and polarimetric images
with size 3×448×448. While training the networks,
we experimentally found that stochastic gradient des-
cent (batch size=1) doesn’t work well. It is reasona-
ble that online learning adds too much instability to
the learning process as the weights widely vary with
each batch, especially for small scale dataset with
multi-classes. As a complement of previous analy-
sis of training on small scale dataset, the data aug-
mentation technology applied to POLABOT dataset
gives the additional guarantee for weights learning.
As a result, we can find that polarimetric images in
our dataset provide high quality feature information,
it is a beneficial premise for further data fusion. The
overall best performance in this dataset was obtained
with CMnet integrating RGB and polarimetric inputs,
achieving a mean IoU of 72.59%. It yields around 3%
comprehensive improvements comparing with the se-
cond best methods.
Some segmentation results on the POLABOT da-
taset are shown in Figure 6.
5 CONCLUSIONS
In this paper, we explored the typical early fusion
and late fusion architectures that extract features from
multi-modalities, and extensively evaluated theirs me-
rits and deficiencies. We also proposed an extensi-
ble multi-level fusion scheme for semantic segmen-
tation, which adopts advanced deep neural network
techniques. It provides design choices for future rese-
arch directions. We presented comprehensive quanti-
tative evaluations of multimodal fusion on two data-
sets. The results show the benefits of fusing multimo-
dal features to achieve state-of-the-art segmentation
performance on small scale datasets. In addition, we
introduced a first-of-a-kind outdoor scene segmenta-
tion dataset for road scene navigation, which contains
high-quality aligned polarimetric images. We empiri-
cally demonstrate that the use of polarization camera
enhance the capabilities of scene understanding.
Future work concerns deeper analysis of multimo-
dal fusion network, since there is still plenty room for
greater precision. One direction is to add the weig-
hts for each input while integrating. Moreover, it is
possible to optimize the fusion pattern based on the
physical properties of modalities and real-world sce-
narios.
ACKNOWLEDGEMENTS
This work was supported by the French Agence Na-
tionale de la Recherche(ANR), under grant ANR-15-
CE22-0009 (project VIPeR), as well as a hardware
grant from NVIDIA.
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder archi-
tecture for image segmentation. IEEE Transactions on
Pattern Analysis & Machine Intelligence, (12):2481–
2495.
Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation
341
RGB
EVI
GT
SEG-RGB
SEG-EVI
E-FUSION
L-FUSION
CMNET
Figure 5: Two segmented examples from Freiburg Forest
dataset. RGB and/or EVI images were given as inputs.
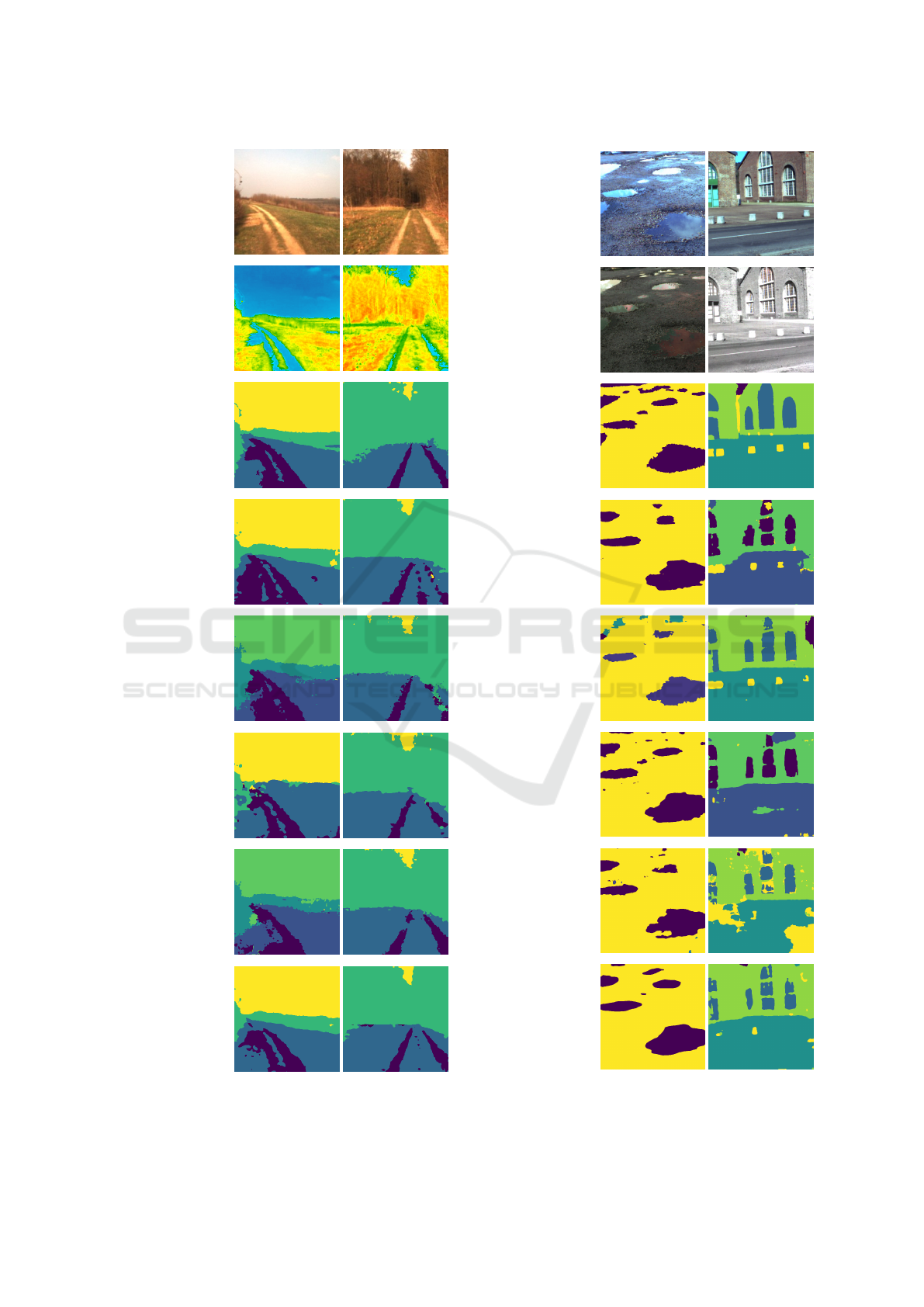
RGB
POLA
GT
SEG-RGB
SEG-POLA
E-FUSION
L-FUSION
CMNET
Figure 6: Two segmented examples from POLABOT data-
set. RGB and/or POLA images were given as inputs.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
342

Brostow, G. J., Fauqueur, J., and Cipolla, R. (2008a).
Semantic object classes in video: A high-definition
ground truth database. Pattern Recognition Letters,
xx(x):xx–xx.
Brostow, G. J., Shotton, J., Fauqueur, J., and Cipolla, R.
(2008b). Segmentation and recognition using struc-
ture from motion point clouds. In ECCV (1), pages
44–57.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2014). Semantic image segmentation
with deep convolutional nets and fully connected crfs.
arXiv preprint arXiv:1412.7062.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2018a). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018b). Encoder-decoder with atrous se-
parable convolution for semantic image segmentation.
arXiv preprint arXiv:1802.02611.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Eitel, A., Springenberg, J. T., Spinello, L., Riedmiller, M.,
and Burgard, W. (2015). Multimodal deep learning
for robust rgb-d object recognition. In Intelligent Ro-
bots and Systems (IROS), 2015 IEEE/RSJ Internatio-
nal Conference on, pages 681–687. IEEE.
Garcia-Garcia, A., Orts-Escolano, S., Oprea, S., Villena-
Martinez, V., and Garcia-Rodriguez, J. (2017). A re-
view on deep learning techniques applied to semantic
segmentation. arXiv preprint arXiv:1704.06857.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Harchanko, J. S. and Chenault, D. B. (2005). Water-surface
object detection and classification using imaging pola-
rimetry. In Polarization Science and Remote Sensing
II, volume 5888, page 588815. International Society
for Optics and Photonics.
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2016). Fusenet: Incorporating depth into semantic
segmentation via fusion-based cnn architecture. In
Asian Conference on Computer Vision, pages 213–
228. Springer.
Hwang, S., Park, J., Kim, N., Choi, Y., and So Kweon, I.
(2015). Multispectral pedestrian detection: Bench-
mark dataset and baseline. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1037–1045.
Jaritz, M., De Charette, R., Wirbel, E., Perrotton, X., and
Nashashibi, F. (2018). Sparse and dense data with
cnns: Depth completion and semantic segmentation.
arXiv preprint arXiv:1808.00769.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Li, Z., Gan, Y., Liang, X., Yu, Y., Cheng, H., and Lin,
L. (2016). Lstm-cf: Unifying context modeling and
fusion with lstms for rgb-d scene labeling. In Euro-
pean Conference on Computer Vision, pages 541–557.
Springer.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Ma, L., St
¨
uckler, J., Kerl, C., and Cremers, D. (2017).
Multi-view deep learning for consistent semantic
mapping with rgb-d cameras. In Intelligent Robots
and Systems (IROS), 2017 IEEE/RSJ International
Conference on, pages 598–605. IEEE.
Mohri, M., Rostamizadeh, A., and Talwalkar, A. (2012).
Foundations of Machine Learning. The MIT Press.
Moisan, L., Moulon, P., and Monasse, P. (2012). Automatic
homographic registration of a pair of images, with a
contrario elimination of outliers. Image Processing
On Line, 2:56–73.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Valada, A., Dhall, A., and Burgard, W. (2016a). Convoluted
mixture of deep experts for robust semantic segmen-
tation. In IEEE/RSJ International Conference on In-
telligent Robots and Systems (IROS) Workshop, State
Estimation and Terrain Perception for All Terrain Mo-
bile Robots.
Valada, A., Oliveira, G., Brox, T., and Burgard, W. (2016b).
Deep multispectral semantic scene understanding of
forested environments using multimodal fusion. In
The 2016 International Symposium on Experimental
Robotics (ISER 2016), Tokyo, Japan.
Vapnik, V. (1998). Statistical learning theory. 1998, vo-
lume 3. Wiley, New York.
Walraven, R. (1977). Polarization imagery. In Optical Po-
larimetry: Instrumentation and Applications, volume
112, pages 164–168. International Society for Optics
and Photonics.
Wolff, L. B. (1997). Polarization vision: a new sensory
approach to image understanding. Image and Vision
computing, 15(2):81–93.
Yu, F. and Koltun, V. (2015). Multi-scale context ag-
gregation by dilated convolutions. arXiv preprint
arXiv:1511.07122.
Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation
343
