
Learning to Remove Rain in Traffic Surveillance by using Synthetic Data
Chris H. Bahnsen
1
, David V
´
azquez
2
, Antonio M. L
´
opez
3
and Thomas B. Moeslund
1
1
Visual Analysis of People Laboratory, Aalborg University, Denmark
2
Element AI, Spain
3
Computer Vision Center, Universitat Aut
`
onoma de Barcelona, Spain
Keywords:
Rain Removal, Traffic Surveillance, Image Denoising.
Abstract:
Rainfall is a problem in automated traffic surveillance. Rain streaks occlude the road users and degrade the
overall visibility which in turn decrease object detection performance. One way of alleviating this is by
artificially removing the rain from the images. This requires knowledge of corresponding rainy and rain-free
images. Such images are often produced by overlaying synthetic rain on top of rain-free images. However,
this method fails to incorporate the fact that rain fall in the entire three-dimensional volume of the scene. To
overcome this, we introduce training data from the SYNTHIA virtual world that models rain streaks in the
entirety of a scene. We train a conditional Generative Adversarial Network for rain removal and apply it on
traffic surveillance images from SYNTHIA and the AAU RainSnow datasets. To measure the applicability of
the rain-removed images in a traffic surveillance context, we run the YOLOv2 object detection algorithm on
the original and rain-removed frames. The results on SYNTHIA show an 8% increase in detection accuracy
compared to the original rain image. Interestingly, we find that high PSNR or SSIM scores do not imply good
object detection performance.
1 INTRODUCTION
In computer vision-enabled traffic surveillance, one
would hope for optimal conditions such as high vis-
ibility, few reflections, and good lighting conditions.
This might be the case under daylight and overcast
weather but is hardly representative of most real-life
weather conditions. To name an example, the vis-
ibility of a scene might be impaired by the occur-
rence of precipitation such as rainfall and snowfall.
The rain and snowfall are present in the images and
videos as spatio-temporal streaks that might occlude
foreground objects of interest. The accumulation of
rain and snow streaks ultimately degrades the visi-
bility of a scene (Shettle, 1990) which render far-
away objects hard to distinguish from the background.
These rain and snow streaks may even adhere to the
camera lens as quasi-static rain drops that remain for
several seconds, effectively blurring a region of the
image. The above-mentioned properties of rain and
snowfall have a detrimental effect on computer vision
algorithms and the research community has therefore
shown great interest to mitigate these effects. Since
the first work by Hase et al. (1999), many subsequent
authors have proposed algorithms with the aim of pro-
ducing a realistic rain-removed image from a real-
world rainy image.
When constructing an algorithm that artificially
removes rain in an image or video, one would typi-
cally optimize for creating rain-removed images that
resemble real-world images as much as possible. Typ-
ically, this is assessed by computing the Peak Signal-
to-Noise-Ratio (PSNR) and the Structural Similarity
Index (SSIM) (Wang et al., 2004) between the rain-
removed image and the ground truth rain-free image.
A high PSNR or SSIM score indicates that the source
and target images are largely similar. The computa-
tion of these metrics, however, requires correspond-
ing image pairs of rainy and rain-free images. For
single-image rain removal, this requirement is usually
met by overlaying artificial rain streaks on real-world
images, typically by generating them in Adobe Pho-
toshop or by using a collection of pre-rendered rain
streaks (Garg and Nayar, 2006). A sample image is
visible from the left part of Figure 1.
Although the individual rain streaks may look re-
alistic, the visual impression of the artificially pro-
duced rain image is less pleasing. Because the gen-
erated rain streaks are layered on top of the rain-free
image, all rain streaks appear to be in the immedi-
Bahnsen, C., Vázquez, D., López, A. and Moeslund, T.
Learning to Remove Rain in Traffic Surveillance by using Synthetic Data.
DOI: 10.5220/0007361301230130
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 123-130
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123

Real image with
synthetic rain
Real image
f
Synthetic image
with synthetic rain
Synthetic image
without rain
f
Traditional approaches
Validation
Real image w.
synthetic rain
Rain-removed
image
f
Real image
PSNR
SSIM
Real image w.
real rain
Object
detection
accuracy
Real image w.
real rain
Rain-removed
image
f
Training
Our approach
Figure 1: Proposed system-at-a-glance. As opposed to tra-
ditional methods, we use fully synthetic data for training
rain removal algorithms. We validate on real-world images
with real rain for which ground truth rain-free images do
not exist, and we are thus unable to use traditional metrics
such as SSIM or PSNR. Instead, we measure the accuracy
of an object detection algorithm on both the original and
rain-removed images. An effective rain removal algorithm
should improve the visibility of foreground objects and thus
increase the object detection accuracy.
ate foreground of the image. However, this fails to
take into account that rain may fall in the entire three-
dimensional volume of the scene and does not model
the visibility degradation caused by the accumulation
of rain drops.
The aim of this work is to create a single-image
based rain removal algorithm that takes both the par-
tial occlusions and the accumulation of rain into ac-
count. We accomplish this by introducing a new train-
ing dataset that consists of images from a purely syn-
thetic, 3D-generated world. By using a computer-
generated 3D world, we can simulate raindrops in the
entirety of the scene and not just in front of the cam-
era. This enables us to mimic the rain streaks, the
accumulation of rain, and the adhering of rain drops
to the virtual camera lens. The concept is illustrated
in Figure 1.
Our contributions are the following:
1. To the best of our knowledge, we are the first to
introduce fully synthetic training data for training
and testing single-image based rain removal algo-
rithms.
2. We train a rain removal algorithm using the data
from above and compare with traditional ap-
proaches that use synthetic rain on top of real-
world images. In order to assess the performance
on real-world traffic surveillance images with real
rain, we propose a new evaluation metric that as-
sesses the performance of an object detection al-
gorithm on the original and rain-removed frames.
If effective, the rain-removed images should im-
prove object detection performance.
3. The proposed evaluation metric is compared with
the traditional PSNR and SSIM metrics to evalu-
ate their usefulness in application-based rain re-
moval.
2 RELATED WORK
The first single-image based rain removal algorithm
was proposed by Fu et al. (2011) and treated rain
removal as a dictionary learning problem where the
challenge is to decide if image patches belong to the
rain component, R, or the background component, B.
Relying on the assumption that rain drops are high-
frequency (HF) oscillations occurring on top of a low-
frequency (LF) background image, the bilateral filter
is applied to the input image to separate it into a HF
and a LF component. The Morphological Component
Analysis technique (Fadili et al., 2010) learns a dic-
tionary of image patches from the HF image and rain
streak patches are identified based on the assumption
that they are brighter than other patches. The dictio-
nary composition approach to rain removal was re-
fined in subsequent works (Chen et al., 2014; Huang
et al., 2014; Kang et al., 2012; Wang et al., 2017b).
An alternative approach was proposed by Chen
and Hsu (2013) that treats the separation of the rain
image R from the background image B as a matrix de-
composition problem. It is assumed that B has low to-
tal variation and that R patches are linearly dependent.
Based on these assumptions, the Inexact Augmented
Lagrange Multiplier is used to solve the constrained
matrix decomposition problem. Subsequent works on
matrix decomposition (Jiang et al., 2017; Luo et al.,
2015) have imposed additional requirements on B and
R such as low rank, sparsity, or mutual exclusivity.
The Achilles heel of the mentioned dictionary
component and matrix decomposition methods is that
they solely rely on heuristically defined statistical
properties to detect and remove the apparent rain.
Real-world textures might not adhere to these statisti-
cal properties, however, and as a result, non-rain tex-
tures might be ’trapped’ inside the rain component.
This problem is overcome by learning the appear-
ance of rain streaks in an offline process that uses a
collection of rain-free images overlaid with synthetic
rain. Recent approaches use such images to train con-
volutional neural networks (CNNs) to remove rain
from single images.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
124

Fu et al. (2017a) combined a guided filter with a
three-layer CNN to produce rain-free images. In the
work to follow, the same author replaced the three-
layer CNN with a much larger network containing
residual connections (Fu et al., 2017b).
A CNN containing dilated convolutions were used
in (Yang et al., 2017) whereas Liu et al. (2017) used
a network based on the Inception V4 architecture
(Szegedy et al., 2017). As opposed to the works of
Fu et al. both methods operate directly on the input
image and may as such capture rain drops that are not
included in the filtered HF image.
Conditional Generative Adversarial Networks.
The recent advent of generative adversarial networks
(GANs) that are conditioned on the input image have
made major breakthroughs in image-to-image trans-
lation (Isola et al., 2017). A conditional GAN may
be used to transfer an image in a specific domain to a
corresponding image in another domain, for instance
from rainy to rain-free images. Zhang et al. (2017a)
modified the Pix2Pix framework by Isola et al. (2017)
by including the perceptual loss function by Johnson
et al. (2016) and trained the conditional GAN on cor-
responding image pairs with and without synthetic
rain.
3 RAIN REMOVAL USING
ENTIRELY SYNTHETIC DATA
In this section, we will describe our proposed rain re-
moval framework. Like most other authors of rain
removal algorithms, we want our network to be able
to remove rain from real-world images with real rain,
including the effects of rain streak occlusion and rain
streak accumulation. The occluding effects of rain
streaks might be modelled by imposing synthetic rain
on real-world images but this approach cannot capture
the effects arising from the accumulation of rain. In
order to capture these effects, we propose to use fully
synthetic training data generated from a computer-
generated 3D world.
More specifically, we use renderings from the
SYNTHIA virtual world (Ros et al., 2016) that cap-
ture four different road intersections as seen from an
infrastructure-side traffic camera. The virtual world
enables us to render two instances of the same se-
quence with the only difference that rain is falling in
one instance but not in the other. Samples from the
four sequences are shown in Figure 2. In total, the
four sequences comprise of 9572 frames.
A benefit of the SYNTHIA virtual world is that
it enables the generation of corresponding segmented
images that may be used directly as ground truth for
semantic segmentation and object detection purposes.
Footage from SYNTHIA has previously been used to
successfully transfer images from summer to winter
(Hoffman et al., 2017) or to transfer from SYNTHIA
to the real-world Cityscapes dataset (Zhang et al.,
2017b). Based on these works, we therefore find it
reasonable to learn the translation from rain images
to no-rain images with the use of SYNTHIA.
Inspired by the recent work in image-to-image
translation and domain adaption (Hoffman et al.,
2017; Shrivastava et al., 2017), we use the conditional
GAN architecture as the backbone of our rain removal
framework.
3.1 Training the Conditional
GAN-network
As point of departure, we take the rain removal al-
gorithm from Zhang et al. (2017a), which consists
of a conditional GAN-network, denoted as IDCGAN.
We compare the IDCGAN with the state-of-the-
art image-to-image translation framework Pix2PixHD
(Wang et al., 2017a).
The discriminator of the IDCGAN-network uses a
five-layer convolutional structure similar to the orig-
inal Pix2Pix-network (Isola et al., 2017) whereas the
generator uses a fully convolutional network with skip
connections, the U-net. The generator architecture is
different from the Pix2Pix-network in two ways:
1. The depth of the U-net is down from eight to six
convolutional layers.
2. The skip-connections are adding the tensors in-
stead of concatenating (joining) them.
The Pix2PixHD network is an improved version
of Pix2Pix that enables the generation of more realis-
tic, high-resolution images.
As training set, we use the aforementioned SYN-
THIA dataset with 9572 corresponding image pairs.
As representative of a dataset with real images and
synthetic rain, the 700 training images from Zhang
et al. (2017a) are used. The IDCGAN and Pix2PixHD
networks are trained separately with the images of
Zhang et al. and the SYNTHIA training images. Fur-
thermore, we use a combination of the two datasets
to train the Pix2PixHD network. An overview of the
resulting five trained networks is found in Table 1. In
order to make the training feasible on a 11 GB GPU,
the training images are scaled down to a maximum
resolution of 720 x 480 pixels. Otherwise, we use the
default parameter settings for training the networks.
Learning to Remove Rain in Traffic Surveillance by using Synthetic Data
125

Figure 2: Synthetic images generated from SYNTHIA at four different locations in the virtual world. From top to bottom:
rain image, no-rain image, ground truth segmented image. The images are cropped for viewing.
Table 1: Overview of the trained conditional GANs for rain removal. The training of IDCGAN-Real-Syn is equivalent to the
original work of Zhang et al. (2017a).
Name Training data
IDCGAN-Real-Syn Real images with synthetic rain
IDCGAN-Syn-Syn SYNTHIA rain images, SYNTHIA no-rain images
Pix2PixHD-Real-Syn Real images with synthetic rain
Pix2PixHD-Syn-Syn SYNTHIA rain images, SYNTHIA no-rain images
Pix2PixHD-Combined SYNTHIA rain images, SYNTHIA no-rain images + real images with synthetic rain
4 ASSESSING THE RAIN
REMOVAL QUALITY
As mentioned in the introduction, the classical ap-
proach of measuring the quality of the rain-removed
image is to apply a rain removal algorithm on a rain-
free image with overlaid synthetic rain and calculate
the PSNR and the SSIM between the resulting im-
age and the corresponding rain free-image. In a traffic
surveillance context, it appears that the overlaid syn-
thetic rain hardly resembles real-world rain. As such,
there is no guarantee that a rain removal algorithm
receiving high PSNR and SSIM scores on synthetic
rain will translate well to real-world rain in a traffic
surveillance image.
We therefore propose a new evaluation metric that
measures the ability of an object detection algorithm
to detect objects in the original and the rain-removed
frames. An effective rain removal algorithm should
be able to create a rain-removed image that resem-
bles a true rain-free image. This means that the oc-
clusion and visibility degradation originating from the
rain streaks should be largely eliminated, creating an
image in which objects are easier to detect. Instead
of requiring the overlay of synthetic rain on rain-free
images, this metric requires the annotation of bound-
ing boxes around objects of interest. We find such
sequences in the AAU RainSnow dataset
1
that con-
tains 2200 annotated frames in a traffic surveillance
context, taken from seven different traffic intersec-
tions. The dataset features a variety of challenging
conditions such as rain, snow, low light, and reflec-
tions. Details about the dataset is found in the paper
by Bahnsen and Moeslund (2018).
As object detection benchmark, we choose the
state-of-the-art You Only Look Once algorithm
(YOLOv2) (Redmon and Farhadi, 2017). YOLOv2 is
chosen due to good detection performance and supe-
rior speed which is especially important in real-time
traffic surveillance. The improvement in detection
performance is assessed by:
1. Running pre-trained YOLOv2 on the original,
rainy images of the SYNTHIA dataset.
2. Removing rain with the networks listed in Table
1 and running pre-trained YOLOv2 on the rain-
removed images.
1
https://www.kaggle.com/aalborguniversity/aau-
rainsnow/
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
126

3. Measuring the detection accuracy of 1) and 2) by
using the COCO API (Lin et al., 2014) and calcu-
lating the relative difference.
We also measure the improvement in detection
performance on the AAU RainSnow dataset by fol-
lowing the above steps, replacing SYNTHIA with
AAU RainSnow.
Because we have access to the ground-truth rain-
free images on SYNTHIA, it is possible to calculate
the PSNR and SSIM ratios between the rain-free im-
ages and the rain-removed images. This enables us
to assess the dependency between the widely used
PSNR and SSIM scores and the relative improvement
in detection accuracy. On AAU RainSnow, it is not
possible to compute the dependency as ground truth
rain-free images do not exist for real-life precipita-
tion.
5 EXPERIMENTAL RESULTS
We have experimented with several hyper-parameter
settings for YOLOv2 and found the best results by
setting the detection threshold, hierarchical thresh-
old, and the non-maximum suppression threshold to
0.1, 0.1, and 0.3, respectively. As detection metric,
we use average precision (AP) over intersection-over-
union (IOU) ratios from .5 to .95 with intervals of .05,
denoted as AP[.5:.05:.95], and average precision at
IOU=0.5, denoted as AP[.5].
5.1 Removing Rain From SYNTHIA
Training Data
We start by measuring the ability to remove rain from
the SYNTHIA data. This is a peculiar case as the
Syn-Syn networks have seen the data during the train-
ing phase and we are thus unable to judge whether
these networks generalize well. It does, however,
give the opportunity to assess the feasibility of the
rain removal algorithms in a best-case scenario and
relate SSIM/PSNR scores and object detection per-
formance, reported in Table 2. The relationship be-
tween PSNR scores and object detection performance
is plotted in Figure 4.
The detection results of Table 2 show that only
two rain removal algorithms, IDCGAN-Real-Syn and
Pix2PixHD-Syn-Syn, improve detection performance
compared to the original rain images, but neither of
the two algorithms come close to the detection per-
formance of the ground truth no-rain images. This
is remarkable given the fact that Pix2PixHD-Syn-Syn
has seen these images during training.
Interestingly, the SSIM and the PSNR scores of
the two rain removal algorithms show little corre-
spondence with the detection results. The IDCGAN-
Real-Syn network is receiving the lowest SSIM score
but shows good detection performance whereas the
IDCGAN-Syn-Syn network is receiving the highest
SSIM score but fails to consistently improve the de-
tection results. If we relate to Figure 4, is is difficult to
establish a consistent relationship between PSNR and
detection results across the evaluated rain removal al-
gorithms.
Example images from the SYNTHIA data are
shown in Figure 3. The networks trained solely on
the SYNTHIA data are able to remove the majority of
rain from the image with IDCGAN-Syn-Syn leaving
the best visual impression, whereas the Pix2PixHD-
Syn-Syn network suffers from checkerboard artifacts
in the reconstructed textures.
5.2 Removing Rain from AAU
RainSnow Sequences
Sample images from running the rain removal al-
gorithms on the AAU RainSnow dataset are shown
in Figure 5 whereas detection results from running
YOLOv2 on the rain-removed images are found in Ta-
ble 3. The detection results show marginal improve-
ments on the networks trained on real images with
synthetic rain (Real-Syn and Combined), whereas
networks trained on only synthetic data (Syn-Syn) de-
teriorate the detection results. If we look at the vi-
sual examples from Figure 5, the rain-removed im-
ages of IDCGAN-Syn-Syn have strange artifacts and
do not seem to lie within the domain of visual im-
ages, whereas the images from the Pix2PixHD-Syn-
Syn network appear to lie closer to the visual domain.
The latter network even attempts to remove the rain
drops from the lower image in Figure 5 and removes
both the large rain streak and the reflections from the
cars from the top image.
In general, the visual results also reveal plenty
of room for improvement for all rain removal algo-
rithms. As an example, the rain streaks on the top
image and the rain drops on the lower image are not
efficiently removed by any algorithm.
5.3 Domain Transfer Results
We find that the IDCGAN and Pix2PixHD networks
behave inconsistently when tested on sequences that
are dissimilar from their training data. On SYNTHIA,
IDCGAN-Real-Syn improves the detection results,
whereas Pix2PixHD-Real-Syn fails to do so, even if
Learning to Remove Rain in Traffic Surveillance by using Synthetic Data
127
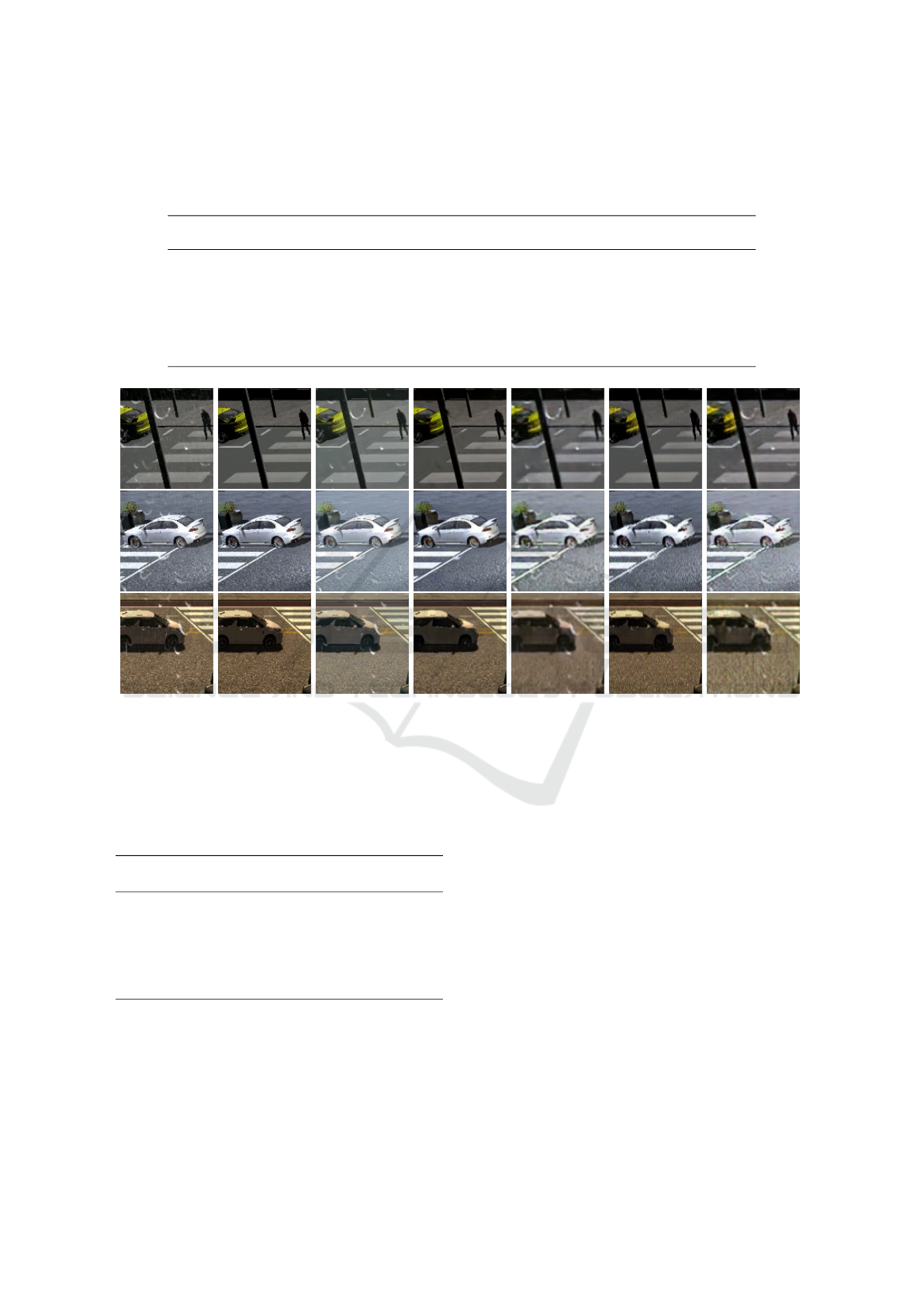
Table 2: Results on the SYNTHIA dataset. Absolute values of detection performance are reported for the original rain image
in italics, whereas other YOLOv2 results are relative to this baseline, shown in percentages. The original no-rain images
are used as reference for computing SSIM and PSNR scores. Correlation denotes the Pearson product-moment correlation
coefficient between the SSIM or PSNR values and the YOLOv2 detection performance (AP[.5:.05:.95]).
YOLOv2 Correlation
Rain removal method SSIM PSNR AP[.5:.05:.95] AP[.5] SSIM/AP PSNR/AP
Original rain image - - .025 .072
Original no-rain image - - 38.4 23.6
IDCGAN-Real-Syn .610 65.3 8.78 2.02 .306 .163
IDCGAN-Syn-Syn .873 80.8 1.51 -7.15 -.118 -.011
Pix2PixHD-Real-Syn .646 69.3 -32.0 -36.2 .069 .457
Pix2PixHD-Syn-Syn .767 75.9 8.07 7.35 .329 .184
Pix2PixHD-Combined .640 70.4 -32.7 -34.5 .385 .432
(a) Original rain
image
(b) Original
no-rain image
(c) IDCGAN-
Real-Syn
(d) IDCGAN-
Synth-Syn
(e) Pix2PixHD-
Real-Syn
(f) Pix2PixHD-
Synth-Syn
(g) Pix2PixHD-
Combined
Figure 3: Rain-removal results on the SYNTHIA dataset. Each column represents the results of a rain removal algorithm on
the original rain image.
Table 3: Detection results on the AAU RainSnow dataset.
Absolute values of detection performance are reported for
the original rain image in italics, whereas other YOLOv2
results are relative to this baseline, shown in percentages.
YOLOv2
Rain removal method AP[.5:.05:.95] AP[.5]
Original rain image .034 .070
IDCGAN-Real-Syn 1.17 0.54
IDCGAN-Syn-Syn -47.9 -42.9
Pix2PixHD-Real-Syn -1.08 3.87
Pix2PixHD-Syn-Syn -14.5 -5.05
Pix2PixHD-Combined -2.43 3.19
providing a higher SSIM score. The results are re-
versed on AAU RainSnow sequences, with IDCGAN-
Syn-Syn providing much worse detection results that
Pix2PixHD-Syn-Syn. No obvious explanation of this
behaviour exists and further experiments are needed
in order to find and understand the most suitable net-
work for domain transfer in rain removal.
6 CONCLUSIONS
We have investigated the use of fully synthetic data
from the SYNTHIA virtual world to train a GAN-
based, single-image rain removal algorithm. Using
the fully synthetic data, we find that there is a con-
siderable gap between detection scores on the rain-
removed images from the best-performing rain re-
moval algorithm and detection scores on the ground
truth images with no rain. Furthermore, we found no
consistent correlation between SSIM or PSNR scores
and detection performance, questioning the useful-
ness of these metrics for application-based rain re-
moval.
Removing rain on real-world traffic surveillance
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
128

Figure 4: Relationship between the improvement in detection performance of the rain-removed images relative to the original
rain images and the similarity score between the rain-removed images and the no-rain images. The r value indicates the
Pearson product-moment correlation coefficient. Results are shown for PSNR but results for SSIM show the same pattern.
(a) Original rain
image
(b) IDCGAN-
Real-Syn
(c) IDCGAN-
Synth-Syn
(d) Pix2PixHD-
Real-Syn
(e) Pix2PixHD-
Synth-Syn
(f) Pix2PixHD-
Combined
Figure 5: Rain-removal results on AAU RainSnow dataset. Each column represents the results of a rain removal algorithm on
the original rain image.
imagery is hard and the evaluated rain-removal only
results in marginal improvements in detection perfor-
mance, if any. Using fully synthetic data for train-
ing allows the removal of some rain streaks that were
not captured by networks trained with only synthetic
rain. There exists, however, a domain gap between
the synthetic data and the real-world sequences. Fu-
ture work should address this by including more di-
verse synthetic data and more variability in real-world
synthetic rain. One could also investigate the use of
recurrent neural networks to incorporate temporal in-
formation from the SYNTHIA dataset. The influence
of rain removal algorithms on detection performance
in traffic surveillance has been studied by Bahnsen
and Moeslund (2018) who observed a slight decrease
in instance segmentation performance on the AAU
RainSnow dataset. Future work could investigate if
it might be beneficial to skip the rain removal step al-
together and use the synthetic rain images to improve
the training of object classification algorithms instead.
Learning to Remove Rain in Traffic Surveillance by using Synthetic Data
129

REFERENCES
Bahnsen, C. H. and Moeslund, T. B. (2018). Rain removal
in traffic surveillance: Does it matter? IEEE Trans on
Intelligent Transportation Systems, pages 1–18.
Chen, D.-Y., Chen, C.-C., and Kang, L.-W. (2014). Visual
depth guided color image rain streaks removal using
sparse coding. IEEE Trans on Circuits and Systems
for Video Technology, 24(8):1430–1455.
Chen, Y.-L. and Hsu, C.-T. (2013). A generalized low-
rank appearance model for spatio-temporally corre-
lated rain streaks. In IEEE Int Conf on Computer Vi-
sion, Proc of the, pages 1968–1975.
Fadili, M. J., Starck, J.-L., Bobin, J., and Moudden, Y.
(2010). Image decomposition and separation using
sparse representations: an overview. Proc of the IEEE,
98(6):983–994.
Fu, X., Huang, J., Ding, X., Liao, Y., and Paisley, J. (2017a).
Clearing the skies: A deep network architecture for
single-image rain removal. Image Processing, IEEE
Trans on, 26(6):2944–2956.
Fu, X., Huang, J., Zeng, D., Huang, Y., Ding, X., and Pais-
ley, J. (2017b). Removing rain from single images via
a deep detail network. In Computer Vision and Pattern
Recognition, IEEE Conf on.
Fu, Y.-H., Kang, L.-W., Lin, C.-W., and Hsu, C.-T. (2011).
Single-frame-based rain removal via image decompo-
sition. In Acoustics, Speech and Signal Processing,
IEEE International Conf on, pages 1453–1456. IEEE.
Garg, K. and Nayar, S. K. (2006). Photorealistic render-
ing of rain streaks. In Graphics, ACM Trans on, vol-
ume 25, pages 996–1002. ACM.
Hase, H., Miyake, K., and Yoneda, M. (1999). Real-time
snowfall noise elimination. In Image Processing, In-
ternational Conf on, volume 2, pages 406–409. IEEE.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P.,
Saenko, K., Efros, A. A., and Darrell, T. (2017). Cy-
cada: Cycle-consistent adversarial domain adaptation.
arXiv preprint arXiv:1711.03213.
Huang, D.-A., Kang, L.-W., Wang, Y.-C. F., and Lin, C.-
W. (2014). Self-learning based image decomposition
with applications to single image denoising. Multime-
dia, IEEE Trans on, 16(1):83–93.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. arXiv preprint.
Jiang, T.-X., Huang, T.-Z., Zhao, X.-L., Deng, L.-J., and
Wang, Y. (2017). A novel tensor-based video rain
streaks removal approach via utilizing discrimina-
tively intrinsic priors. In Computer Vision and Pattern
Recognition, IEEE Conf on.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In European Conf on Computer Vision, pages 694–
711. Springer.
Kang, L.-W., Lin, C.-W., and Fu, Y.-H. (2012). Auto-
matic single-image-based rain streaks removal via im-
age decomposition. Image Processing, IEEE Trans
on, 21(4):1742–1755.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Eu-
ropean Conf on Computer Vision, pages 740–755.
Springer.
Liu, Y.-F., Jaw, D.-W., Huang, S.-C., and Hwang, J.-N.
(2017). Desnownet: Context-aware deep network for
snow removal. arXiv preprint arXiv:1708.04512.
Luo, Y., Xu, Y., and Ji, H. (2015). Removing rain from
a single image via discriminative sparse coding. In
Computer Vision and Pattern Recognition, IEEE Conf
on, pages 3397–3405.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. arXiv preprint.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and
Lopez, A. M. (2016). The synthia dataset: A large
collection of synthetic images for semantic segmenta-
tion of urban scenes. In Proceedings of the IEEE Conf
on Computer Vision and Pattern Recognition, pages
3234–3243.
Shettle, E. P. (1990). Models of aerosols, clouds, and pre-
cipitation for atmospheric propagation studies. In In
AGARD, Atmospheric Propagation in the UV, Visible,
IR, and MM-Wave Region and Related Systems As-
pects 14 p (SEE N90-21907 15-32).
Shrivastava, A., Pfister, T., Tuzel, O., Susskind, J., Wang,
W., and Webb, R. (2017). Learning from simulated
and unsupervised images through adversarial training.
In CVPR, volume 2, page 5.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. A.
(2017). Inception-v4, inception-resnet and the impact
of residual connections on learning. In AAAI, pages
4278–4284.
Wang, T.-C., Liu, M.-Y., Zhu, J.-Y., Tao, A., Kautz, J., and
Catanzaro, B. (2017a). High-resolution image synthe-
sis and semantic manipulation with conditional gans.
arXiv preprint arXiv:1711.11585.
Wang, Y., Liu, S., Chen, C., and Zeng, B. (2017b). A hier-
archical approach for rain or snow removing in a sin-
gle color image. Image Processing, IEEE Trans on,
26(8):3936–3950.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visibil-
ity to structural similarity. Image Processing, IEEE
transa on, 13(4):600–612.
Yang, W., Tan, R. T., Feng, J., Liu, J., Guo, Z., and Yan, S.
(2017). Deep joint rain detection and removal from a
single image. In Computer Vision and Pattern Recog-
nition, IEEE Conf on.
Zhang, H., Sindagi, V., and Patel, V. M. (2017a). Image
de-raining using a conditional generative adversarial
network. Computer Vision and Pattern Recognition,
IEEE Conf on.
Zhang, Y., David, P., and Gong, B. (2017b). Curriculum
domain adaptation for semantic segmentation of urban
scenes. In The IEEE Int Conf on Computer Vision
(ICCV), volume 2, page 6.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
130
