
Improving Unsupervised Defect Segmentation
by Applying Structural Similarity to Autoencoders
Paul Bergmann
1
, Sindy L
¨
owe
1,2
, Michael Fauser
1
, David Sattlegger
1
and Carsten Steger
1
1
MVTec Software GmbH, Germany
2
University of Amsterdam, The Netherlands
Keywords:
Unsupervised Learning, Anomaly Detection, Defect Segmentation.
Abstract:
Convolutional autoencoders have emerged as popular methods for unsupervised defect segmentation on image
data. Most commonly, this task is performed by thresholding a per-pixel reconstruction error based on an
`
p
-distance. This procedure, however, leads to large residuals whenever the reconstruction includes slight
localization inaccuracies around edges. It also fails to reveal defective regions that have been visually altered
when intensity values stay roughly consistent. We show that these problems prevent these approaches from
being applied to complex real-world scenarios and that they cannot be easily avoided by employing more
elaborate architectures such as variational or feature matching autoencoders. We propose to use a perceptual
loss function based on structural similarity that examines inter-dependencies between local image regions,
taking into account luminance, contrast, and structural information, instead of simply comparing single pixel
values. It achieves significant performance gains on a challenging real-world dataset of nanofibrous materials
and a novel dataset of two woven fabrics over state-of-the-art approaches for unsupervised defect segmentation
that use per-pixel reconstruction error metrics.
1 INTRODUCTION
Visual inspection is essential in industrial manufac-
turing to ensure high production quality and high
cost efficiency by quickly discarding defective parts.
Since manual inspection by humans is slow, expen-
sive, and error-prone, the use of fully automated com-
puter vision systems is becoming increasingly popu-
lar. Supervised methods, where the system learns
how to segment defective regions by training on both
defective and non-defective samples, are commonly
used. However, they involve a large effort to annotate
data and all possible defect types need to be known
beforehand. Furthermore, in some production pro-
cesses, the scrap rate might be too small to produce
a sufficient number of defective samples for training,
especially for data-hungry deep learning models.
In this work, we focus on unsupervised defect seg-
mentation for visual inspection. The goal is to seg-
ment defective regions in images after having trai-
ned exclusively on non-defective samples. It has been
shown that architectures based on convolutional neu-
ral networks (CNNs) such as autoencoders (Goodfel-
low et al., 2016) or generative adversarial networks
(GANs) (Goodfellow et al., 2014) can be used for this
task. We provide a brief overview of such methods in
Section 2. These models try to reconstruct their in-
puts in the presence of certain constraints such as a
bottleneck and thereby manage to capture the essence
of high-dimensional data (e.g., images) in a lower-
dimensional space. It is assumed that anomalies in
the test data deviate from the training data manifold
and the model is unable to reproduce them. As a re-
sult, large reconstruction errors indicate defects. Ty-
pically, the error measure that is employed is a per-
pixel `
p
-distance, which is an ad-hoc choice made for
the sake of simplicity and speed. However, these me-
asures yield high residuals in locations where the re-
construction is only slightly inaccurate, e.g., due to
small localization imprecisions of edges. They also
fail to detect structural differences between the input
and reconstructed images when the respective pixels’
color values are roughly consistent. We show that this
limits the usefulness of such methods when employed
in complex real-world scenarios.
To alleviate the aforementioned problems, we
propose to measure reconstruction accuracy using
the structural similarity (SSIM) metric (Wang et al.,
2004). SSIM is a distance measure designed to cap-
ture perceptual similarity that is less sensitive to edge
372
Bergmann, P., Löwe, S., Fauser, M., Sattlegger, D. and Steger, C.
Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders.
DOI: 10.5220/0007364503720380
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 372-380
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
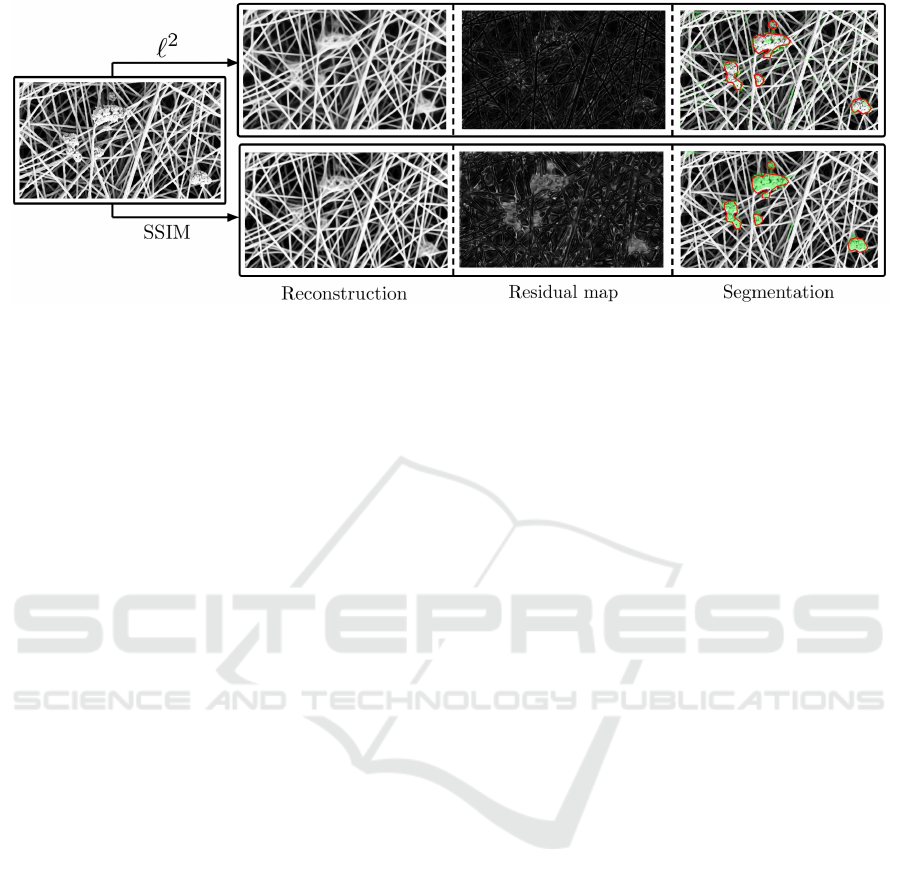
Figure 1: A defective image of nanofibrous materials is reconstructed by an autoencoder optimizing either the commonly
used pixel-wise `
2
-distance or a perceptual similarity metric based on structural similiarity (SSIM). Even though an `
2
-
autoencoder fails to properly reconstruct the defects, a per-pixel comparison of the original input and reconstruction does not
yield significant residuals that would allow for defect segmentation. The residual map using SSIM puts more importance on
the visually salient changes made by the autoencoder, enabling for an accurate segmentation of the defects.
alignment and gives importance to salient differences
between input and reconstruction. It captures inter-
dependencies between local pixel regions that are dis-
regarded by the current state-of-the-art unsupervised
defect segmentation methods based on autoencoders
with per-pixel losses. We evaluate the performance
gains obtained by employing SSIM as a loss function
on two real-world industrial inspection datasets and
demonstrate significant performance gains over per-
pixel approaches. Figure 1 demonstrates the advan-
tage of perceptual loss functions over a per-pixel `
2
-
loss on the NanoTWICE dataset of nanofibrous ma-
terials (Carrera et al., 2017). While both autoen-
coders alter the reconstruction in defective regions,
only the residual map of the SSIM autoencoder al-
lows a segmentation of these areas. By changing the
loss function and otherwise keeping the same autoen-
coding architecture, we reach a performance that is
on par with other state-of-the-art unsupervised defect
segmentation approaches that rely on additional mo-
del priors such as handcrafted features or pretrained
networks.
2 RELATED WORK
Detecting anomalies that deviate from the training
data has been a long-standing problem in machine le-
arning. Pimentel et al. (Pimentel et al., 2014) give
a comprehensive overview of the field. In compu-
ter vision, one needs to distinguish between two va-
riants of this task. First, there is the classification sce-
nario, where novel samples appear as entirely diffe-
rent object classes that should be predicted as out-
liers. Second, there is a scenario where anomalies
manifest themselves in subtle deviations from other-
wise known structures and a segmentation of these
deviations is desired. For the classification problem,
a number of approaches have been proposed (Perera
and Patel, 2018; Sabokrou et al., 2018). Here, we li-
mit ourselves to an overview of methods that attempt
to tackle the latter problem.
(Napoletano et al., 2018) extract features from a
CNN that has been pretrained on a classification task.
The features are clustered in a dictionary during trai-
ning and anomalous structures are identified when the
extracted features strongly deviate from the learned
cluster centers. General applicability of this appro-
ach is not guaranteed since the pretrained network
might not extract useful features for the new task at
hand and it is unclear which features of the network
should be selected for clustering. The results achieved
with this method are the current state-of-the-art on the
NanoTWICE dataset, which we also use in our expe-
riments. They improve upon previous results by (Car-
rera et al., 2017), who build a dictionary that yields a
sparse representation of the normal data. Similar ap-
proaches using sparse representations for novelty de-
tection are (Boracchi et al., 2014; Carrera et al., 2015;
Carrera et al., 2016).
(Schlegl et al., 2017) train a GAN on optical cohe-
rence tomography images of the retina and detect ano-
malies such as retinal fluid by searching for a latent
sample that minimizes the per-pixel `
2
-reconstruction
error as well as a discriminator loss. The large number
of optimization steps that must be performed to find a
suitable latent sample makes this approach very slow.
Therefore, it is only useful in applications that are not
time-critical. Recently, (Zenati et al., 2018) proposed
to use bidirectional GANs (Donahue et al., 2017) to
add the missing encoder network for faster inference.
Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders
373

However, GANs are prone to run into mode collapse,
i.e., there is no guarantee that all modes of the dis-
tribution of non-defective images are captured by the
model. Furthermore, they are more difficult to train
than autoencoders since the loss function of the ad-
versarial training typically cannot be trained to con-
vergence (Arjovsky and Bottou, 2017). Instead, the
training results must be judged manually after regular
optimization intervals.
(Baur et al., 2018) propose a framework for defect
segmentation using autoencoding architectures and a
per-pixel error metric based on the `
1
-distance. To
prevent the disadvantages of their loss function, they
improve the reconstruction quality by requiring alig-
ned input data and adding an adversarial loss to en-
hance the visual quality of the reconstructed images.
However, for many applications that work on unstruc-
tured data, prior alignment is impossible. Further-
more, optimizing for an additional adversarial loss
during training but simply segmenting defects ba-
sed on per-pixel comparisons during evaluation might
lead to worse results since it is unclear how the adver-
sarial training influences the reconstruction.
Other approaches take into account the structure
of the latent space of variational autoencoders (VAEs)
(Kingma and Welling, 2014) in order to define mea-
sures for outlier detection. (An and Cho, 2015) de-
fine a reconstruction probability for every image pixel
by drawing multiple samples from the estimated en-
coding distribution and measuring the variability of
the decoded outputs. (Soukup and Pinetz, 2018) dis-
regard the decoder output entirely and instead com-
pute the KL divergence as a novelty measure between
the prior and the encoder distribution. This is ba-
sed on the assumption that defective inputs will mani-
fest themselves in mean and variance values that are
very different from those of the prior. Similarly, (Va-
silev et al., 2018) define multiple novelty measures,
either by purely considering latent space behavior or
by combining these measures with per-pixel recon-
struction losses. They obtain a single scalar value
that indicates an anomaly, which can quickly become
a performance bottleneck in a segmentation scenario
where a separate forward pass would be required for
each image pixel to obtain an accurate segmentation
result. We show that per-pixel reconstruction proba-
bilities obtained from VAEs suffer from the same pro-
blems as per-pixel deterministic losses (cf. Section 4).
All the aforementioned works that use autoen-
coders for unsupervised defect segmentation have
shown that autoencoders reliably reconstruct non-
defective images while visually altering defective re-
gions to keep the reconstruction close to the learned
manifold of the training data. However, they rely on
per-pixel loss functions that make the unrealistic as-
sumption that neighboring pixel values are mutually
independent. We show that this prevents these appro-
aches from segmenting anomalies that differ predomi-
nantly in structure rather than pixel intensity. Instead,
we propose to use SSIM (Wang et al., 2004) as the
loss function and measure of anomaly by comparing
input and reconstruction. SSIM takes interdependen-
cies of local patch regions into account and evaluates
their first and second order moments to model diffe-
rences in luminance, contrast, and structure. (Rid-
geway et al., 2015) show that SSIM and the closely
related multi-scale version MS-SSIM (Wang et al.,
2003) can be used as differentiable loss functions to
generate more realistic images in deep architectures
for tasks such as superresolution, but do not examine
its usefulness for defect segmentation in an autoen-
coding framework. In all our experiments, switching
from per-pixel to perceptual losses yields significant
gains in performance, sometimes enhancing the met-
hod from a complete failure to a satisfactory defect
segmentation result.
3 METHODOLOGY
3.1 Autoencoders for Unsupervised
Defect Segmentation
Autoencoders attempt to reconstruct an input image
x ∈ R
k×h×w
through a bottleneck, effectively pro-
jecting the input image into a lower-dimensional
space, called latent space. An autoencoder consists
of an encoder function E : R
k×h×w
→ R
d
and a deco-
der function D : R
d
→ R
k×h×w
, where d denotes the
dimensionality of the latent space and k, h,w denote
the number of channels, height, and width of the in-
put image, respectively. Choosing d k ×h × w pre-
vents the architecture from simply copying its input
and forces the encoder to extract meaningful features
from the input patches that facilitate accurate recon-
struction by the decoder. The overall process can be
summarized as
ˆ
x = D(E(x)) = D(z) , (1)
where z is the latent vector and
ˆ
x the reconstruction
of the input. In our experiments, the functions E and
D are parameterized by CNNs. Strided convolutions
are used to down-sample the input feature maps in the
encoder and to up-sample them in the decoder. Au-
toencoders can be employed for unsupervised defect
segmentation by training them purely on defect-free
image data. During testing, the autoencoder will fail
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
374
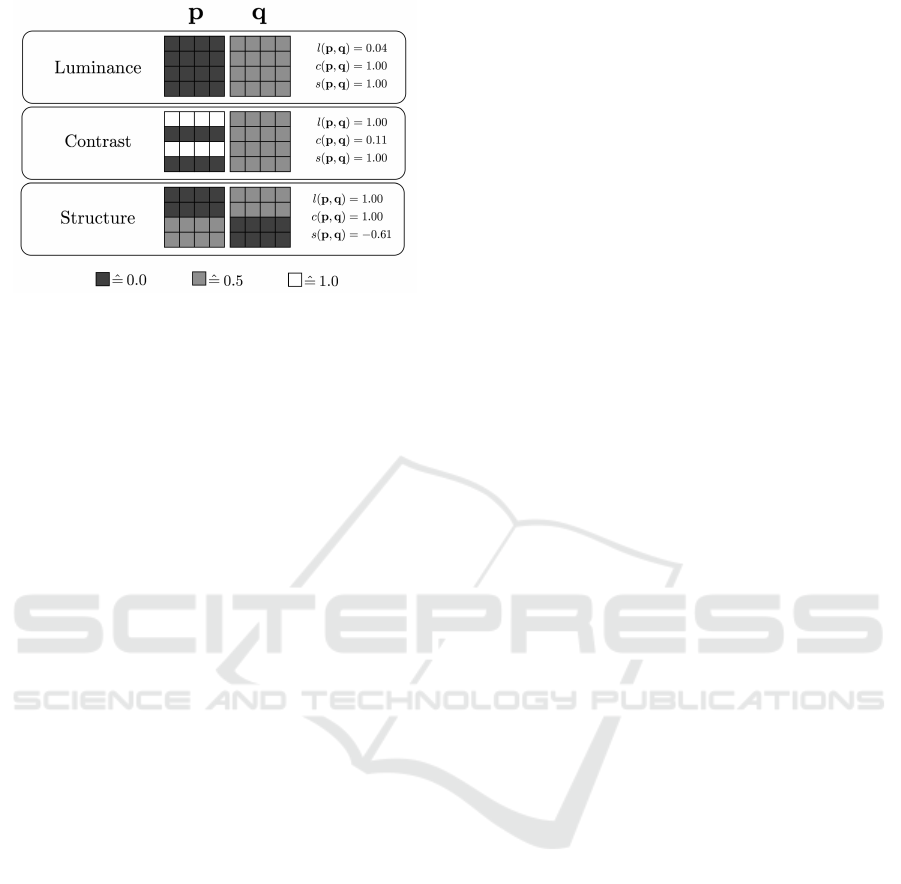
Figure 2: Different responsibilities of the three similarity
functions employed by SSIM. Example patches p and q
differ in either luminance, contrast, or structure. SSIM
is able to distinguish between these three cases, assigning
close to minimum similarity values to one of the compari-
son functions l(p, q), c(p, q), or s(p,q), respectively. An
`
2
-comparison of these patches would yield a constant per-
pixel residual value of 0.25 for each of the three cases.
to reconstruct defects that have not been observed du-
ring training, which can thus be segmented by compa-
ring the original input to the reconstruction and com-
puting a residual map R(x,
ˆ
x) ∈ R
w×h
.
3.1.1 `
2
-Autoencoder
To force the autoencoder to reconstruct its input,
a loss function must be defined that guides it to-
wards this behavior. For simplicity and computational
speed, one often chooses a per-pixel error measure,
such as the L
2
loss
L
2
(x,
ˆ
x) =
h−1
∑
r=0
w−1
∑
c=0
(x(r, c) −
ˆ
x(r, c))
2
, (2)
where x(r, c) denotes the intensity value of image x
at the pixel (r, c). To obtain a residual map R
`
2
(x,
ˆ
x)
during evaluation, the per-pixel `
2
-distance of x and
ˆ
x
is computed.
3.1.2 Variational Autoencoder
Various extensions to the deterministic autoencoder
framework exist. VAEs (Kingma and Welling, 2014)
impose constraints on the latent variables to follow
a certain distribution z ∼ P(z). For simplicity, the
distribution is typically chosen to be a unit-variance
Gaussian. This turns the entire framework into a pro-
babilistic model that enables efficient posterior infe-
rence and allows to generate new data from the trai-
ning manifold by sampling from the latent distribu-
tion. The approximate posterior distribution Q(z|x)
obtained by encoding an input image can be used
to define further anomaly measures. One option is
to compute a distance between the two distributi-
ons, such as the KL-divergence K L(Q(z|x)||P(z)),
and indicate defects for large deviations from the
prior P(z) (Soukup and Pinetz, 2018). However, to
use this approach for the pixel-accurate segmenta-
tion of anomalies, a separate forward pass for each
pixel of the input image would have to be perfor-
med. A second approach for utilizing the posterior
Q(z|x) that yields a spatial residual map is to decode
N latent samples z
1
,z
2
,. . ., z
N
drawn from Q(z|x) and
to evaluate the per-pixel reconstruction probability
R
VAE
= P(x|z
1
,z
2
,. . ., z
N
) as described by (An and
Cho, 2015).
3.1.3 Feature Matching Autoencoder
Another extension to standard autoencoders was pro-
posed by (Dosovitskiy and Brox, 2016). It increa-
ses the quality of the produced reconstructions by ex-
tracting features from both the input image x and its
reconstruction
ˆ
x and enforcing them to be equal. Con-
sider F : R
k×h×w
→ R
f
to be a feature extractor that
obtains an f -dimensional feature vector from an in-
put image. Then, a regularizer can be added to the
loss function of the autoencoder, yielding the feature
matching autoencoder (FM-AE) loss
L
FM
(x,
ˆ
x) = L
2
(x,
ˆ
x) + λkF(x) − F(
ˆ
x)k
2
2
, (3)
where λ > 0 denotes the weighting factor between the
two loss terms. F can be parameterized using the first
layers of a CNN pretrained on an image classification
task. During evaluation, a residual map R
FM
is obtai-
ned by comparing the per-pixel `
2
-distance of x and
ˆ
x.
The hope is that sharper, more realistic reconstructi-
ons will lead to better residual maps compared to a
standard `
2
-autoencoder.
3.1.4 SSIM Autoencoder
We show that employing more elaborate architectures
such as VAEs or FM-AEs does not yield satisfactory
improvements of the residial maps over deterministic
`
2
-autoencoders in the unsupervised defect segmen-
tation task. They are all based on per-pixel evalua-
tion metrics that assume an unrealistic independence
between neighboring pixels. Therefore, they fail to
detect structural differences between the inputs and
their reconstructions. By adapting the loss and eva-
luation functions to capture local inter-dependencies
between image regions, we are able to drastically im-
prove upon all the aforementioned architectures. In
Section 3.2, we specifically motivate the use of the
strucutural similarity metric SSIM(x,
ˆ
x) as both the
loss function and the evaluation metric for autoenco-
ders to obtain a residual map R
SSIM
.
Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders
375

(a)
(b)
(c)
(d)
Figure 3: A toy example illustrating the advantages of SSIM over `
2
for the segmentation of defects. (a) 128 × 128 chec-
kerboard pattern with gray strokes and dots that simulate defects. (b) Output reconstruction
ˆ
x of the input image x by an
`
2
-autoencoder trained on defect-free checkerboard patterns. The defects have been removed by the autoencoder. (c) `
2
-
residual map. Brighter colors indicate larger dissimilarity between input and reconstruction. (d) Residuals for luminance l,
contrast c, structure s, and their pointwise product that yields the final SSIM residual map. In contrast to the `
2
-error map,
SSIM gives more importance to the visually more salient disturbances than to the slight inaccuracies around reconstructed
edges.
3.2 Structural Similarity
The SSIM index (Wang et al., 2004) defines a dis-
tance measure between two K × K image patches p
and q, taking into account their similarity in lumi-
nance l(p, q), contrast c(p,q), and structure s(p, q):
SSIM(p,q) = l(p, q)
α
c(p,q)
β
s(p,q)
γ
, (4)
where α,β,γ ∈ R are user-defined constants to weight
the three terms. The luminance measure l(p,q) is es-
timated by comparing the patches’ mean intensities
µ
p
and µ
q
. The contrast measure c(p, q) is a function
of the patch variances σ
2
p
and σ
2
q
. The structure mea-
sure s(p,q) takes into account the covariance σ
pq
of
the two patches. The three measures are defined as:
l(p, q) =
2µ
p
µ
q
+ c
1
µ
2
p
+ µ
2
q
+ c
1
(5)
c(p,q) =
2σ
p
σ
q
+ c
2
σ
2
p
+ σ
2
q
+ c
2
(6)
s(p,q) =
2σ
pq
+ c
2
2σ
p
σ
q
+ c
2
. (7)
The constants c
1
and c
2
ensure numerical stability and
are typically set to c
1
= 0.01 and c
2
= 0.03. By sub-
stituting (5)-(7) into (4), the SSIM is given by
SSIM(p,q) =
(2µ
p
µ
q
+ c
1
)(2σ
pq
+ c
2
)
(µ
2
p
+ µ
2
q
+ c
1
)(σ
2
p
+ σ
2
q
+ c
2
)
. (8)
It holds that SSIM(p, q) ∈ [−1,1]. In particular,
SSIM(p,q) = 1 if and only if p and q are identi-
cal (Wang et al., 2004). Figure 2 shows the diffe-
rent perceptions of the three similarity functions that
form the SSIM index. Each of the patch pairs p and
q has a constant `
2
-residual of 0.25 per pixel and
hence assigns low defect scores to each of the three
cases. SSIM on the other hand is sensitive to variati-
ons in the patches’ mean, variance, and covariance in
its respective residual map and assigns low similarity
to each of the patch pairs in one of the comparison
functions.
To compute the structural similarity between an
entire image x and its reconstruction
ˆ
x, one slides a
K ×K window across the image and computes a SSIM
value at each pixel location. Since (8) is differentia-
ble, it can be employed as a loss function in deep le-
arning architectures that are optimized using gradient
descent.
Figure 3 indicates the advantages SSIM has over
per-pixel error functions such as `
2
for segmenting de-
fects. After training an `
2
-autoencoder on defect-free
checkerboard patterns of various scales and orien-
tations, we apply it to an image (Figure 3(a)) that
contains gray strokes and dots that simulate defects.
Figure 3(b) shows the corresponding reconstruction
produced by the autoencoder, which removes the de-
fects from the input image. The two remaining subfi-
gures display the residual maps when evaluating the
reconstruction error with a per-pixel `
2
-comparison
or SSIM. For the latter, the luminance, contrast, and
structure maps are also shown. For the `
2
-distance,
both the defects and the inaccuracies in the recon-
struction of the edges are weighted equally in the er-
ror map, which makes them indistinguishable. Since
SSIM computes three different statistical features for
image comparison and operates on local patch regi-
ons, it is less sensitive to small localization inaccu-
racies in the reconstruction. In addition, it detects de-
fects that manifest themselves in a change of structure
rather than large differences in pixel intensity. For the
defects added in this particular toy example, the con-
trast function yields the largest residuals.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
376
(a) (b)
(c)
(d)
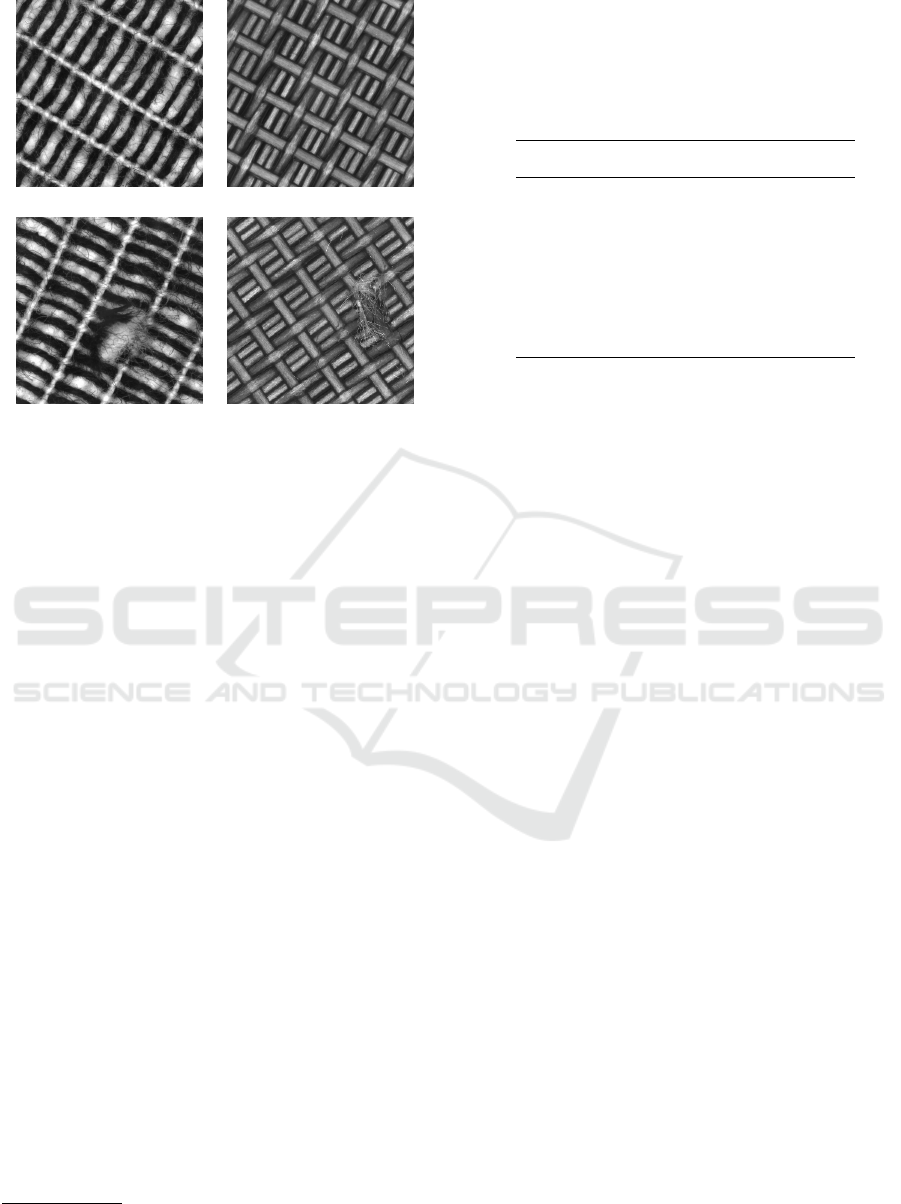
Figure 4: Example images from the contributed texture da-
taset of two woven fabrics. (a) and (b) show examples of
non-defective textures that can be used for training. (c) and
(d) show exemplary defects for both datasets. See the text
for details.
4 EXPERIMENTS
4.1 Datasets
Due to the lack of datasets for unsupervised defect
segmentation in industrial scenarios, we contribute a
novel dataset of two woven fabric textures, which is
available to the public
1
. We provide 100 defect-free
images per texture for training and validation and 50
images that contain various defects such as cuts, roug-
hened areas, and contaminations on the fabric. Pixel-
accurate ground truth annotations for all defects are
also provided. All images are of size 512 ×512 pixels
and were acquired as single-channel gray-scale ima-
ges. Examples of defective and defect-free textures
can be seen in Figure 4. We further evaluate our
method on a dataset of nanofibrous materials (Car-
rera et al., 2017), which contains five defect-free gray-
scale images of size 1024 × 700 for training and va-
lidation and 40 defective images for evaluation. A
sample image of this dataset is shown in Figure 1.
4.2 Training and Evaluation Procedure
For all datasets, we train the autoencoders with their
respective losses and evaluation metrics, as descri-
1
The dataset will be made available at http://www.
mvtec.com/company/research/publications.
Table 1: General outline of our autoencoder architecture.
The depicted values correspond to the structure of the enco-
der. The decoder is built as a reversed version of this. Leaky
rectified linear units (ReLUs) with slope 0.2 are applied as
activation functions after each layer except for the output
layers of both the encoder and the decoder, in which linear
activation functions are used.
Layer Output Size Parameters
Kernel Stride Padding
Input 128x128x1
Conv1 64x64x32 4x4 2 1
Conv2 32x32x32 4x4 2 1
Conv3 32x32x32 3x3 1 1
Conv4 16x16x64 4x4 2 1
Conv5 16x16x64 3x3 1 1
Conv6 8x8x128 4x4 2 1
Conv7 8x8x64 3x3 1 1
Conv8 8x8x32 3x3 1 1
Conv9 1x1xd 8x8 1 0
bed in Section 3.1. Each architecture is trained on
10 000 defect-free patches of size 128 × 128, rand-
omly cropped from the given training images. In or-
der to capture a more global context of the textures,
we down-scaled the images to size 256 × 256 before
cropping. Each network is trained for 200 epochs
using the ADAM (Kingma and Ba, 2015) optimizer
with an initial learning rate of 2 × 10
−4
and a weight
decay set to 10
−5
. The exact parametrization of the
autoencoder network shared by all tested architectu-
res is given in Table 1. The latent space dimension
for our experiments is set to d = 100 on the texture
images and to d = 500 for the nanofibres due to their
higher structural complexity. For the VAE, we decode
N = 6 latent samples from the approximate posterior
distribution Q(z|x) to evaluate the reconstruction pro-
bability for each pixel. The feature matching autoen-
coder is regularized with the first three convolutional
layers of an AlexNet (Krizhevsky et al., 2012) pre-
trained on ImageNet (Russakovsky et al., 2015) and
a weight factor of λ = 1. For SSIM, the window size
is set to K = 11 unless mentioned otherwise and its
three residual maps are equally weighted by setting
α = β = γ = 1.
The evaluation is performed by striding over the
test images and reconstructing image patches of size
128 × 128 using the trained autoencoder and com-
puting its respective residual map R. In principle,
it would be possible to set the horizontal and verti-
cal stride to 128. However, at different spatial loca-
tions, the autoencoder produces slightly different re-
constructions of the same data, which leads to some
striding artifacts. Therefore, we decreased the stride
to 30 pixels and averaged the reconstructed pixel va-
lues. The resulting residual maps are thresholded
to obtain candidate regions where a defect might be
present. An opening with a circular structuring ele-
ment of diameter 4 is applied as a morphological post-
Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders
377
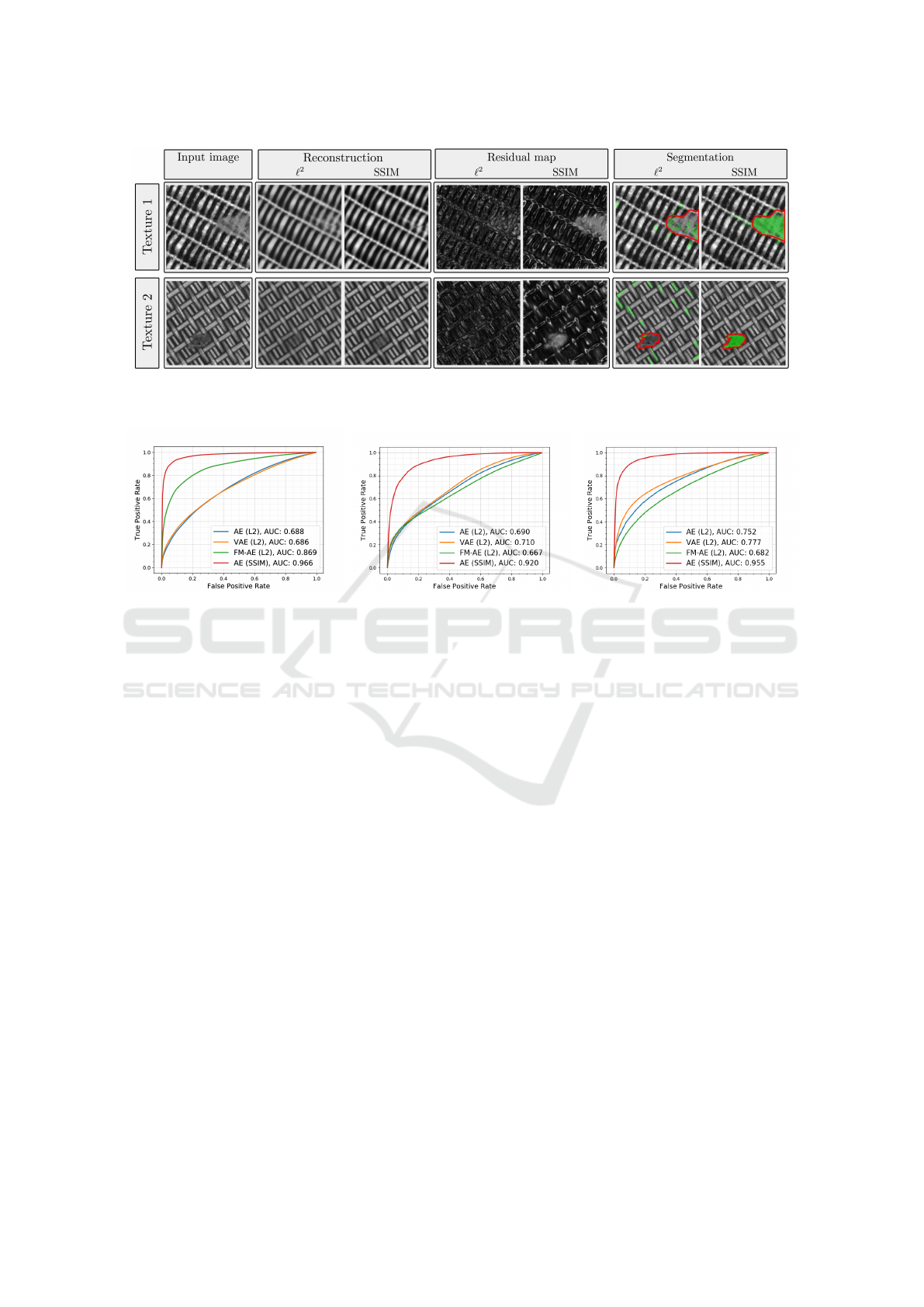
Figure 5: Qualitative comparison between reconstructions, residual maps, and segmentation results of an `
2
-autoencoder and
an SSIM autoencoder on two datasets of woven fabric textures. The ground truth regions containing defects are outlined in
red while green areas mark the segmentation result of the respective method.
(a)
(b) (c)
Figure 6: Resulting ROC curves of the proposed SSIM autoencoder (red line) on the evaluated datasets of nanofibrous
materials (a) and the two texture datasets (b), (c) in comparison with other autoencoding architectures that use per-pixel
loss functions (green, orange, and blue lines). Corresponding AUC values are given in the legend.
processing to delete outlier regions that are only a few
pixels wide (Steger et al., 2018). We compute the re-
ceiver operating characteristic (ROC) as the evalua-
tion metric. The true positive rate is defined as the
ratio of pixels correctly classified as defect across the
entire dataset. The false positive rate is the ratio of
pixels misclassified as defect.
4.3 Results
Figure 5 shows a qualitative comparison between the
performance of the `
2
-autoencoder and the SSIM au-
toencoder on images of the two texture datasets. Alt-
hough both architectures remove the defect in the re-
construction, only the SSIM residual map reveals the
defects and provides an accurate segmentation result.
The same can be observed for the NanoTWICE data-
set, as shown in Figure 1.
We confirm this qualitative behavior by numerical
results. Figure 6 compares the ROC curves and their
respective AUC values of our approach using SSIM
to the per-pixel architectures. The performance of the
latter is often only marginally better than classifying
each pixel randomly. For the VAE, we found that
the reconstructions obtained by different latent sam-
ples from the posterior does not vary greatly. Thus,
it could not improve on the deterministic framework.
Employing feature matching only improved the seg-
mentation result for the dataset of nanofibrous mate-
rials, while not yielding a benefit for the two texture
datasets. Using SSIM as the loss and evaluation me-
tric outperforms all other tested architectures signi-
ficantly. By merely changing the loss function, the
achieved AUC improves from 0.688 to 0.966 on the
dataset of nanofibrous materials, which is compara-
ble to the state-of-the-art given in (Napoletano et al.,
2018), where values of up to 0.974 are reported. In
contrast to this method, autoencoders do not rely on
any model priors such as handcrafted features or pre-
trained networks. For the two texture datasets, similar
leaps in performance are observed.
Since the dataset of nanofibrous materials contains
defects of various sizes and smaller sized defects con-
tribute less to the overall true positive rate when weig-
hting all pixel equally, we further evaluated the over-
lap of each detected anomaly region with the ground
truth for this dataset and report the p-quantiles for
p ∈ {25%, 50%, 75%} in Figure 7. For false positive
rates as low as 5%, more than 50% of the defects have
an overlap with the ground truth that is larger than
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
378
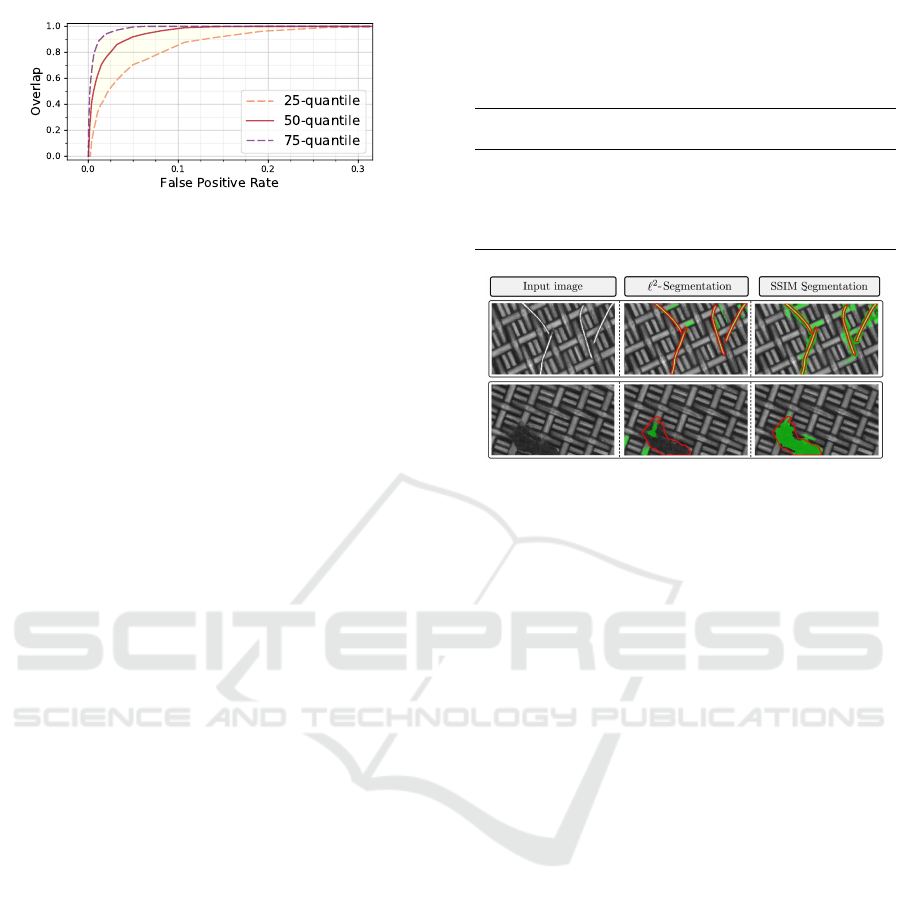
Figure 7: Per-region overlap for individual defects between
our segmentation and the ground truth for different false po-
sitive rates using an SSIM autoencoder on the dataset of na-
nofibrous materials.
91%. This outperforms the results achieved by (Na-
poletano et al., 2018), who report a minimal overlap
of 85% in this setting.
We further tested the sensitivity of the SSIM au-
toencoder to different hyperparameter settings. We
varied the latent space dimension d, SSIM window
size k, and the size of the patches that the autoen-
coder was trained on. Table 2 shows that SSIM is
insensitive to different hyperparameter settings once
the latent space dimension is chosen to be sufficiently
large. Using the optimal setup of d = 500, k = 11, and
patch size 128 × 128, a forward pass through our ar-
chitecture takes 2.23 ms on a Tesla V100 GPU. Patch-
by-patch evaluation of an entire image of the Nano-
TWICE dataset takes 3.61 s on average, which is sig-
nificantly faster than the runtimes reported by (Napo-
letano et al., 2018). Their approach requires between
15 s and 55 s to process a single input image.
Figure 8 depicts qualitative advantages that em-
ploying a perceptual error metric has over per-pixel
distances such as `
2
. It displays two defective images
from one of the texture datasets, where the top image
contains a high-contrast defect of metal pins which
contaminate the fabric. The bottom image shows a
low-contrast structural defect where the fabric was
cut open. While the `
2
-norm has problems to detect
the low-constrast defect, it easily segments the metal
pins due to their large absolute distance in gray va-
lues with respect to the background. However, misa-
lignments in edge regions still lead to large residuals
in non-defective regions as well, which would make
these thin defects hard to segment in practice. SSIM
robustly segments both defect types due to its simul-
taneous focus on luminance, contrast, and structural
information and insensitivity to edge alignment due
to its patch-by-patch comparisons.
5 CONCLUSION
We demonstrate the advantage of perceptual loss
functions over commonly used per-pixel residuals in
Table 2: Area under the ROC curve (AUC) on NanoTWICE
for varying hyperparameters in the SSIM autoencoder ar-
chitecture. Different settings do not significantly alter de-
fect segmentation performance.
Latent
dimension
AUC
SSIM
window size
AUC Patch size AUC
50 0.848 3 0.889
100 0.935 7 0.965 32 0.949
200 0.961 11 0.966 64 0.959
500 0.966 15 0.960 128 0.966
1000 0.962 19 0.952
Figure 8: In the first row, the metal pins have a large diffe-
rence in gray values in comparison to the defect-free back-
ground material. Therefore, they can be detected by both
the `
2
and the SSIM error metric. The defect shown in the
second row, however, differs from the texture more in terms
of structure than in absolute gray values. As a consequence,
a per-pixel distance metric fails to segment the defect while
SSIM yields a good segmentation result.
autoencoding architectures when used for unsupervi-
sed defect segmentation tasks. Per-pixel losses fail
to capture inter-dependencies between local image
regions and therefore are of limited use when de-
fects manifest themselves in structural alterations of
the defect-free material where pixel intensity values
stay roughly consistent. We further show that em-
ploying probabilistic per-pixel error metrics obtained
by VAEs or sharpening reconstructions by feature ma-
tching regularization techniques do not improve the
segmentation result since they do not address the pro-
blems that arise from treating pixels as mutually inde-
pendent.
SSIM, on the other hand, is less sensitive to small
inaccuracies of edge locations due to its comparison
of local patch regions and takes into account three dif-
ferent statistical measures: luminance, contrast, and
structure. We demonstrate that switching from per-
pixel loss functions to an error metric based on struc-
tural similarity yields significant improvements by
evaluating on a challenging real-world dataset of na-
nofibrous materials and a contributed dataset of two
woven fabric materials which we make publicly avai-
lable. Employing SSIM often achieves an enhance-
ment from almost unusable segmentations to results
that are on par with other state of the art approaches
for unsupervised defect segmentation which additi-
Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders
379

onally rely on image priors such as pre-trained net-
works.
REFERENCES
An, J. and Cho, S. (2015). Variational Autoencoder based
Anomaly Detection using Reconstruction Probability.
SNU Data Mining Center, Tech. Rep.
Arjovsky, M. and Bottou, L. (2017). Towards Principled
Methods for Training Generative Adversarial Net-
works. International Conference on Learning Repre-
sentations.
Baur, C., Wiestler, B., Albarqouni, S., and Navab, N.
(2018). Deep Autoencoding Models for Unsupervised
Anomaly Segmentation in Brain MR Images. arXiv
preprint arXiv:1804.04488.
Boracchi, G., Carrera, D., and Wohlberg, B. (2014). No-
velty Detection in Images by Sparse Representations.
In 2014 IEEE Symposium on Intelligent Embedded Sy-
stems (IES), pages 47–54. IEEE.
Carrera, D., Boracchi, G., Foi, A., and Wohlberg, B.
(2015). Detecting anomalous structures by convo-
lutional sparse models. In 2015 International Joint
Conference on Neural Networks (IJCNN), pages 1–8.
IEEE.
Carrera, D., Boracchi, G., Foi, A., and Wohlberg, B.
(2016). Scale-invariant anomaly detection with mul-
tiscale group-sparse models. In 2016 IEEE Interna-
tional Conference on Image Processing (ICIP), pages
3892–3896. IEEE.
Carrera, D., Manganini, F., Boracchi, G., and Lanzarone,
E. (2017). Defect Detection in SEM Images of Na-
nofibrous Materials. IEEE Transactions on Industrial
Informatics, 13(2):551–561.
Donahue, J., Kr
¨
ahenb
¨
uhl, P., and Darrell, T. (2017). Adver-
sarial Feature Learning. International Conference on
Learning Representations.
Dosovitskiy, A. and Brox, T. (2016). Generating Ima-
ges with Perceptual Similarity Metrics based on Deep
Networks. In Advances in Neural Information Proces-
sing Systems, pages 658–666.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative Adversarial Nets. In Ad-
vances in Neural Information Processing Systems, pa-
ges 2672–2680.
Kingma, D. P. and Ba, J. (2015). Adam: A Method for
Stochastic Optimization. International Conference on
Learning Representations.
Kingma, D. P. and Welling, M. (2014). Auto-Encoding Va-
riational Bayes. International Conference on Lear-
ning Representations.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
ImageNet Classification With Deep Convolutional
Neural Networks. In Advances in Neural Information
Processing Systems, pages 1097–1105.
Napoletano, P., Piccoli, F., and Schettini, R. (2018). Ano-
maly Detection in Nanofibrous Materials by CNN-
Based Self-Similarity. Sensors, 18(1):209.
Perera, P. and Patel, V. M. (2018). Learning Deep Fe-
atures for One-Class Classification. arXiv preprint
arXiv:1801.05365.
Pimentel, M. A., Clifton, D. A., Clifton, L., and Tarassenko,
L. (2014). A review of novelty detection. Signal Pro-
cessing, 99:215–249.
Ridgeway, K., Snell, J., Roads, B., Zemel, R. S., and
Mozer, M. C. (2015). Learning to generate ima-
ges with perceptual similarity metrics. arXiv preprint
arXiv:1511.06409.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). ImageNet Large Scale Vi-
sual Recognition Challenge. International Journal of
Computer Vision, 115(3):211–252.
Sabokrou, M., Khalooei, M., Fathy, M., and Adeli, E.
(2018). Adversarially Learned One-Class Classifier
for Novelty Detection. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 3379–3388.
Schlegl, T., Seeb
¨
ock, P., Waldstein, S. M., Schmidt-Erfurth,
U., and Langs, G. (2017). Unsupervised Anomaly
Detection with Generative Adversarial Networks to
Guide Marker Discovery. In International Conference
on Information Processing in Medical Imaging, pages
146–157. Springer.
Soukup, D. and Pinetz, T. (2018). Reliably Decoding
Autoencoders’ Latent Spaces for One-Class Learning
Image Inspection Scenarios. In OAGM Workshop
2018. Verlag der Technischen Universit
¨
at Graz.
Steger, C., Ulrich, M., and Wiedemann, C. (2018). Ma-
chine Vision Algorithms and Applications. Wiley-
VCH, Weinheim, 2nd edition.
Vasilev, A., Golkov, V., Lipp, I., Sgarlata, E., Tomassini, V.,
Jones, D. K., and Cremers, D. (2018). q-Space No-
velty Detection with Variational Autoencoders. arXiv
preprint arXiv:1806.02997.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Wang, Z., Simoncelli, E. P., and Bovik, A. C. (2003). Mul-
tiscale structural similarity for image quality asses-
sment. In Record of the Thirty-Seventh Asilomar Con-
ference on Signals, Systems and Computers, volume 2,
pages 1398–1402. Ieee.
Zenati, H., Foo, C. S., Lecouat, B., Manek, G.,
and Chandrasekhar, V. R. (2018). Efficient
GAN-Based Anomaly Detection. arXiv preprint
arXiv:1802.06222.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
380
