
Volumetric Video Capture using Unsynchronized, Low-cost Cameras
Andrea Bönsch
1
, Andrew Feng
2
, Parth Patel
2
and Ari Shapiro
2
1
Visual Computing Institute, RWTH Aachen University, Aachen, Germany
2
Institute for Creative Technologies, University of Southern California, Los Angeles, U.S.A.
Keywords:
Avatar, Video Capture, Photogrammetry, Low-cost, Animation.
Abstract:
Volumetric video can be used in virtual and augmented reality applications to show detailed animated perfor-
mances by human actors. In this paper, we describe a volumetric capture system based on a photogrammetry
cage with unsynchronized, low-cost cameras which is able to generate high-quality geometric data for animated
avatars. This approach requires, inter alia, a subsequent synchronization of the captured videos.
1 MOTIVATION
Recent advances in virtual and augmented reality
technology has increased the demand for authentically
animated 3D avatars as personalized, digital doubles
of human subjects. To generate photo-realistic avatar
models in a fast and cost-efficient manner, photogram-
metry cages with low-cost cameras and a traditional
3D pipeline for the avatar mesh generation proved to be
beneficial. Extending the pipeline by rigging, skinning,
and animation allows to use the resulting avatar models
as realistic and interactive doubles in 3D environ-
ments (Feng et al., 2017). However, seeing a virtual
double of a known human subject raises expectations
with respect to precise body movements, mimics, and
overall behavior. Thus, the avatar needs to be animated
authentically with respect to its real-life counterpart.
Capturing and processing sufficient data in order to
recreate such a detailed and authentically animated
human model in 3D is a non-trivial and time-consuming
task, including the capture and processing of numerous
facial expressions, and simulation of clothing and hair.
By contrast, volumetric video can preserve detailed
performances, including facial expressions, hair
movements, and clothing folds without the need to un-
derstand and thus to model and simulate such systems.
Photogrammetry cages designed to capture human
bodies typically use over 100 cameras in close
proximity to the captured subject in order to maximize
geometric and texture quality from the reconstruction
process. We explored whether such a cage can be
utilized for volumetric video capture of a human
subject’s performance as well. In this work, we present
our resulting volumetric capture pipeline derived from
Figure 1: 3D volumetric reconstruction results showing
different facial expressions, gaze lines, and skin wrinkles.
a low-cost, Raspberry Pi-based photogrammetry cage
that uses unsynchronized cameras. Our results indicate,
that the animated reconstruction geometric quality is
high, and the overall visual quality is sufficient to show
detailed facial expressions of the captured subject (see
Fig. 1) including hair movement and clothing folds.
2 BACKGROUND
Creating free viewpoint video of humans has been
an important yet challenging research problem. Such
capture systems usually involve multi-camera setups
with carefully designed capture environments. The
pioneer work by Carranza et al. (Carranza et al.,
2003) utilized a deformable body model and fit the
model into multiple silhouette images of an actor to
reconstruct the 3D performance. The work by Vlasic
Bönsch, A., Feng, A., Patel, P. and Shapiro, A.
Volumetric Video Capture using Unsynchronized, Low-cost Cameras.
DOI: 10.5220/0007373202550261
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 255-261
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255

et al. (Vlasic et al., 2008) also applied a similar skeletal
deformable model to fit into a multi-view visual hull.
Casas et al. (Casas et al., 2014) proposed a novel data
representation to efficiently store and render the model
with view-dependent textures. The work by Collet et
al. (Collet et al., 2015) is a capture system using infrared
and synchronized cameras. They also deal with the
topology changes of the captured sequences by tracking
and encoding the texture meshes at suitable keyframes.
In a recent approach, Achenbach et al. (Achenbach
et al., 2017) propose a multi-view stereo reconstruction
process using separate scanners for the subject’s body
and face, each equipped with single-shot, synchronized
cameras. Based on nine manually placed landmarks,
the captured data is then fitted to a human template
model in order to animate the obtained avatar based
on separately captured motion data.
More recently, with the ubiquity of RGB-D sensors
from Microsoft Kinect, Occipital Structure Sensor,
or iPhone X, it becomes much easier to obtain a 3D
reconstruction of a static object. However, to capture
a dynamic scene, multiple sensors are usually required.
Dou et al. (Dou et al., 2013) utilize eight Kinect sensors
and a deformable template model to capture dynamic
human performances. Their follow up work (Dou
et al., 2016) tracks the mesh across different cameras
and frames to reconstruct a temporally consistent
mesh without using a template model. The work by
Wang et al. (Wang et al., 2016) used a novel pairwise
registration method to reconstruct the dynamic textured
models of a moving subject with only a small number
of handheld RGB-D sensors. Recent research has
developed novel methods to reconstruct the dynamic
3D performances without the requirements for multiple
sensors. DynamicFusion (Newcombe et al., 2015)
first fuses a detailed template model on-the-fly from
multiple frames. It then utilizes the non-rigid motion
sequences obtained through the non-rigid registration
to reconstruct the dynamic performance with detailed
geometry. The work by Guo et al. (Guo et al., 2017)
improves upon this work by also extracting the albedo
and low-frequency lighting from the reconstruction to
allow relighting and albedo editing during real-time
rendering of 4D video.
Photogrammetry can be used to reconstruct 3D
models of real objects, ranging from the very large,
such as entire buildings or cityscapes, to small, such
as personal objects like shoes and pursues. Many
photogrammetric algorithms rely on the assumption
that a capture object is rigid, stationary and unmovable.
It is difficult for people to stand completely still for
any period of time; bodies regularly sway slightly as
a consequence of balancing, eyelids blink, and the
upper body can change in volume as a consequence
of breathing. For this reason, the most accurate 3D
reconstruction results come from capture systems that
simultaneously capture from multiple locations, such
as capture cages.
In contrast to most approaches mentioned before,
capture cages do not utilize depth sensors while being
build based on low-cost hardware setups (Garsthagen,
2014). Nevertheless, these photogrammetry cages
produce results suitable for immersive uses (Feng et al.,
2017). Several studies have used avatars of that quality,
including whether game performance is affected by
using one’s own doppelganger (Lucas et al., 2016)
and whether there is a gender difference when using
self-similar avatars (Wauck et al., 2018).
In order to reuse existing and approved hardware
setups, we extended a low-cost photogrammetry
capture cage allowing it to serve two purposes:
1. Traditional Photogrammetry
Generating realistic, but static 3D avatars as digital
doubles of human subjects (Feng et al., 2017).
2. Volumetric Video
Obtaining animated 3D avatars reflecting all details
of a captured human subject’s performance, based
on the approach described in this work.
3 SYSTEM OVERVIEW
Our goal is to derive a volumetric capture system
tailored to the photogrammetry cage shown in Figure 2.
The cage consisting of 104 unsynchronized Raspberry
Figure 2: Photogrammetric capture cage consisting of 104
unsynchronized Raspberry Pi cameras; Designed for human
body capture and used for volumetric video reconstruction.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
256
Video
Capture
Frame
Extraction
Frame
Synchronization
Time-Step-Based
Mesh Construction
Camera
Preparation
3D Rendering
of the Animated Avatar
Figure 3: Overview of the volumetric capture system pipeline.
Pi 2 Modules B+, each connected to a Raspberry Pi
RGB camera module rev 1.3.
Challenges include the video quality, the capture
frame rates, as well as the synchronization of the
captured videos. We address these issues by dedicated
steps in our system’s pipeline, which is schematically
illustrated in Figure 3. Thus, the proposed system
ensures (a) qualitatively sufficient videos with a reason-
able frame rate (20-24 fps) from different perspectives
(Fig. 3, red steps), (b) a subsequent video synchroniza-
tion based on two camera flashes (Fig. 3, green steps),
and (c) a time-step-based mesh construction using
photogrammetry with an ensuing 3D rendering of the
meshes to display the subject’s animated avatar in a VR
or AR environment (Fig. 3, blue steps).
The technical advancement of our approach is
surely limited, as we re-use and partially improve
existing techniques to configure a proper pipeline.
However, the insight gained in our work is valuable for
future approaches used to digitalize a human subject’s
performances.
4 VOLUMETRIC
CAPTURE SYSTEM
4.1 Capturing the Subject
Our goal is to record a human subject inside a
capture cage to generate a detailed, animated, and
personalized avatar for use in 3D environments. To
ensure qualitatively sufficient videos for this process,
we carefully adjust the Raspberry Pi camera parameters
by means of PiScanner (Jones, 2013). Thereby, we
use identical configurations for all cameras, providing
a consistent visual quality and allowing a subsequent
video synchronization.
Camera Preparation
In order to generate matching textures for the single
time steps of the animated avatar, we first ensure an
adequate and constant brightness per video. Therefore,
the automatic brightness adjustment is deactivated by
disabling the automatic gain of the cameras’ video
ports. As a consequence, a preparation step is required
to adjust the digital and analog gain as they cannot
be set directly. Without this preparation, the captured
videos will appear black as the automatic camera
adjustment uses initially low gain values. Testing
indicates that capturing two photos on the video
port prior to the video recording results in a suitable
brightness and color configuration.
Video Capture
Besides the previously ensured constant brightness,
additional demands are placed on the captured videos
to allow an animated avatar generation: (i) Using
uncompressed file formats prevents handling com-
pression artifacts and issues arising due to the quality
reduction of the videos. (ii) A high video resolution
with a denoised data stream simplifies the construction
process and provides high-quality textures, improving
the visual quality of the resulting avatar meshes. (iii) A
high frame rate guarantees to capture a complete
performance sequence, avoiding discontinuities in the
constructed animation. (iv) Synchronization markers
support the subsequent video synchronization. How-
ever, as some of these parameters mutually influence
each other, we had to make several compromises.
Using an uncompressed video format leads to a
large amount of data to be stored, limiting the frame rate
to about five fps. As this is insufficient for capturing a
human’s performance,
i
cannot be met. Using the lossy
compression h264 instead, reduces the data amount
allowing higher frame rates while maintaining a suffi-
cient video quality. As the captured frame rate is not
stored here, it has to be manually computed by dividing
the recording time by the number of frames captured.
Choosing a high resolution (2592
×
1944) meeting
ii
, again, reduces the frame rate to an insufficient low
amount. Thus, we set the resolution to 1920
×
1080.
Based on the documentation, this allows a frame rate
up to 30 fps. However, we observed strong differences
in the fps between the single cameras, while none of
it reached the 30 fps. By defining the frame rate to be
25 fps for the capture process, we could solve this issue
while ensuring a stable and sufficiently high frame rate
meeting iii.
The cameras’ video ports do not use aggressive
denoising algorithms. Thus, the video quality obtained
by the h264 encoder has to be specified explicitly.
Indicated by several tests,
20
is a suitable quality
value to meet
iii
. This quality assurance allows
reconstructing geometric details from the videos.
For the volumetric reconstruction, the video
feeds need to be synchronized among the multiple
cameras. Common approaches include hardware
synchronization or sound synchronization. However,
Volumetric Video Capture using Unsynchronized, Low-cost Cameras
257

recording time t
...
cam 1
cam 2
cam 3
cam n
time steps 1 3 m
...
5
...
...
...
...
Figure 4: Video synchronization and mesh generation: Two
flashes are detected per video (yellow frames). Based on
the gathered information on the time span between both
flashes via the other videos, false detections are ignored (blue
frame) and missing flashes are added (green frame). After
the alignment, one mesh is constructed for all m time steps.
since the cameras have no hardware synchronization
1
and no microphones, other synchronization markers
have to be introduced. Here, two flashes from a
professional photographer’s flash are used, denoting
the start and end of a subject’s performance during
the video capture phase. Consequently, the videos
are subsequently synchronized based on their frames’
luminance histograms, explained next.
4.2 Processing the Videos
After the volumetric capture, the videos’ frames are
extracted and a computer-vision-based synchronization
is used to collect the single frames across all videos per
animation time step.
Frame Extraction
An FFmpeg routine is used to extract the frames per
video as jpg images. As the chosen file format h264
does not provide the video’s actual frame rate, we
provide it based on our fps computation. Furthermore,
specifying the use of the image file demuxer and
setting an appropriate image quality level enhances the
resulting images and thus the construction result.
1
Although the signals to start and end a video capture
are sent simultaneously to all cameras, we observed different
timings for the actual recording events caused by, e.g., slight
delays due to network travel or by different processing times
per camera module.
Frame Synchronization
For the video synchronization, two camera flashes
during the video capture are used. Besides being the
synchronization markers, the flashes denote the start
and end of the subject’s performance. Short flash times
are chosen to minimize their occurrence in the videos
to single frames. Aligning these frames, yield the
required synchronization, indicated in Figure 4.
The flash detection is based on a computer vision
approach presented by Shrestha et al. (Shrestha
et al., 2006): a flash is detected when the luminance
histograms between two consecutive frames differ
significantly. Although the proposed approach was
successful in many tests, we experienced false or
missing detections in some occasions. To address this
issue, we improved the approach by an automatic flash
adaption, utilizing information about the time span be-
tween both flashes gathered from the videos, in which
the correct amount of flashes had been detected (see
Fig. 4). Three cases are handled: (1) If three flashes are
detected, the most unlikely one is ignored. (2) If only
one flash is detected, the frame number of the missing
flash’s occurrence is estimated based on the gathered
information. The flash is added if the respective frame
exists. Otherwise, the video is excluded from the
reconstruction process. (3) If no flash is detected, the re-
spective video is discarded. Although this extension is
simple and straightforward, it enhances the final results.
Based on the adapted flash detection, we can now
specify which frames contribute to which time step
of the avatar animation (see Fig. 4). Next, the frames
in-between the flashes are resorted, all other frames
are ignored. The resorting is done time-step-wise by
collecting the respective frame per video in a common
directory, preparing the avatar generation process.
4.3 Generating the Animated Avatar
Time-step-based Mesh Construction
After the video frames are synchronized and resorted,
a photogrammetry software, e.g., Agisoft Photo-
scan (Agisoft, 2006), is used for a time-step-based
mesh construction (see Fig. 4). Thereby, an embedded
mesh clean-up automatically eliminates the captured
environment, i.e., the capture cage and the floor, from
the final meshes. In addition, the construction step is
parallelized across 50 nodes, accelerating the output
generation.
In order to facilitate the subsequent avatar ren-
dering, an identical transformation of all meshes is
required. Hereto, a camera alignment for the mesh
construction is defined by the initial time step. This
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
258
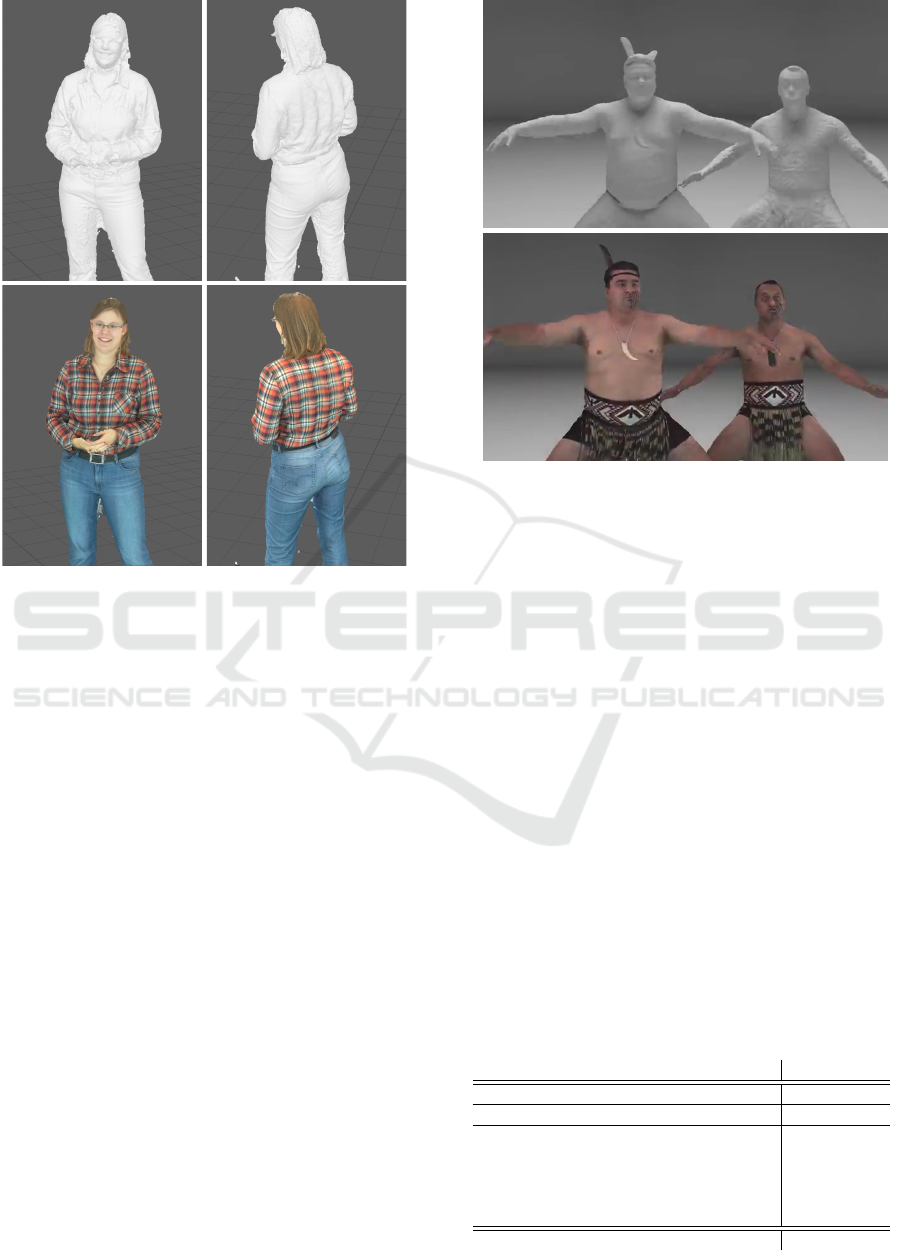
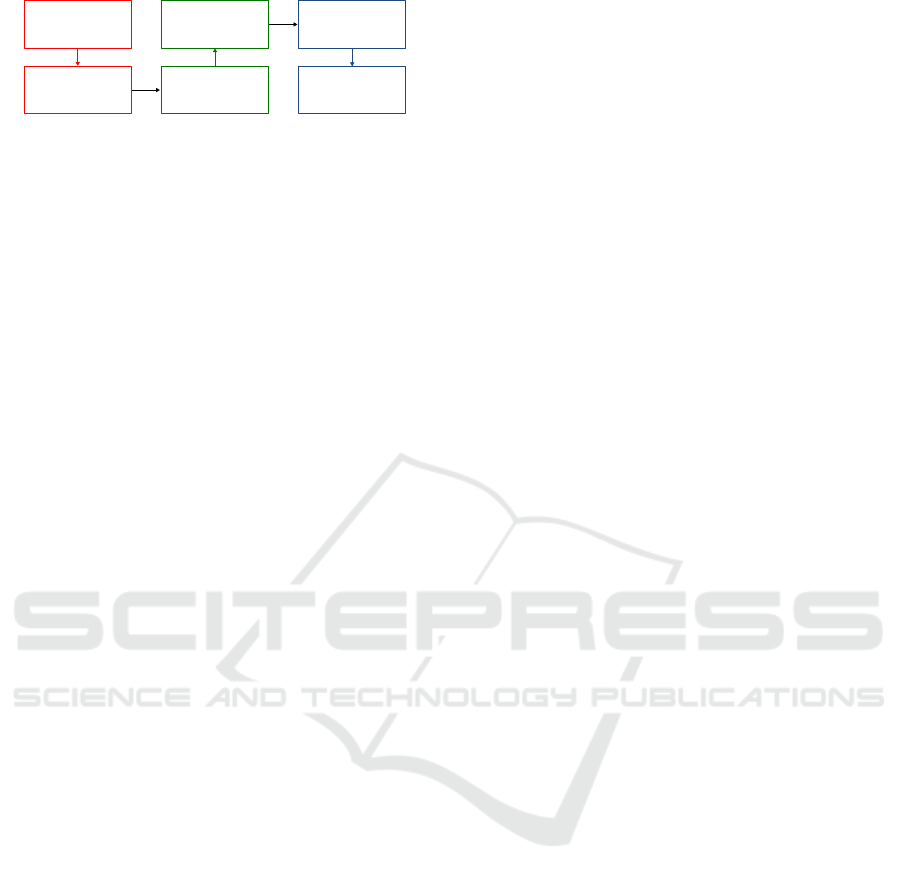
Figure 5: Resulting geometry (top) and fully textured models
(bottom) of a typical animated frame of volumetric rendering.
alignment is then shared to reconstruct the meshes of
the remaining time steps.
3D Rendering
Finally, all generated meshes are rendered in their
chronological order in 3D to display the animated
avatar of the recorded human subject, demonstrated
in the supplemental material.
5 RESULTS
We tested the volumetric capture system in our capture
cage. For the synchronization, we used a Neewer
NW670 E-TTL Flash with a wireless trigger. By this,
the flashes are triggered from outside the capture cage,
reducing the video content to the cage and the subject
and thus facilitating the mesh generation of the human
subject’s performance. A suitable flash configuration
in our setup is a 24mm zoom and 0.5 as brightness
value of the speedlite in M-Mode.
The output quality of the volumetric data is
exemplarily shown in Figure 5. The geometry and the
textured renderings have a high level of detail regarding
mimics (see also Fig. 1), hair and clothing folds.
Figure 6: Resulting geometry (top) and fully textured models
(bottom) from the volumetric capture in (Collet et al., 2015).
Particularly, when comparing our meshes to those
generated by high-quality approaches, our pipeline is a
promising low-cost variant. As example, data presented
by Collet et al. is given in Figure 6. Their approach
uses 106 synchronized RGB and IR video cameras
on a greenscreen stage for the volumetric capture,
while the mesh generation pipeline is optimized for
high-quality, coherent mesh output by an adaptive
meshing technique which is guided by automatic
detection of perceptually salient areas as well as by a
mesh tracking (Collet et al., 2015). As the mesh quality
between Collet’s and our approach are comparable, we
are convinced that volumetric capture systems based on
photogrammetry cages with unsynchronized, low-cost
cameras provide suitably detailed, animated avatars.
The generation time for an animated avatar, how-
ever, is a shortcoming of our system. While the camera
preparation step of 20 seconds per volumetric capture is
neglectable, the duration of the remaining steps heavily
Table 1: Durations to generate an animated avatar based on
104 videos (fps: 24, length: 30 sec).
# Description Duration
1 camera preparation 20 sec
2 video recording 30 sec
3 frame extraction 8.7 min
durations
depend
on #2
4 video synchronization
a) flash detection 90 min
b) frame sorting 30 min
5 mesh generation 120 min
Total Duration 4.16 h
Volumetric Video Capture using Unsynchronized, Low-cost Cameras
259

depend on the captured videos’ lengths. Table 1 gives
the figures of the individual pipeline steps, based on
104 captured videos with 24 fps and a length of 30 sec-
onds. Furthermore, it is assumed that all 720 frames per
video are used in the photogrammetry reconstruction,
resulting in a total pipeline duration of 4.16 hours. Per
time-step of the animation, the mesh generation based
on 104 images takes 8.7 minutes, resulting in approxi-
mately 104.4 hours on a single computer. As each frame
of the video can be reconstructed independently based
on the same camera alignment, we parallelized this step
on a 50 node cluster. As a consequence, we were able to
significantly reduce the mesh generation time to approx-
imately 0.17 seconds per frame, resulting in 2 hours for
the complete video, as shown in step 5 of Table 1.
6 LIMITATIONS
The capture space is confined by the photogrammetry
cage’s footprint, limiting the type of movements which
can be recorded. In our cage, subjects can only move
within a narrow volume of about
0.8m
3
. Although this
is sufficient for animations required in virtual face-
to-face conversations or interactions, expanding the
available space would enhance the system’s use case.
As the capture frame rate of the low-cost camera
used is limited, fast movements result in partially
blurred frames. As a consequence, rapid moving body
parts, such as hands, e.g., during waving, or aspects
like flying hair during head movements, can be missing
in the final mesh, preventing a detailed digitization
of the subject per frame. Thus, the visual quality and
naturalness of the resulting, animated avatar might
decrease and mesh discontinuities between succeeding
frames might occur. However, for most gestures and
mimics required in face-to-face interactions (see Fig. 1),
the achieved recording speed is sufficient. To use our
pipeline also for faster performances two methods
are reasonable: (a) An increased capture frame rate
would improve the quality of the reconstructed imagery.
However, the specific setup of our capture cage restricts
the potential frame rates: The placement of the cameras
within the cage was designed around a 4:3 image aspect
ratio, but the Raspberry Pi cameras used are not capable
of capturing in 4:3 at a high frame rate, so a 16:9 aspect
ratio resolution was used instead. This results in less
overlap between neighboring imagery, thereby nega-
tively affecting the final quality of the reconstructed
video. (b) A mesh tracking over the single time steps
should be embedded to improve the generated mesh
quality. By using the mesh information of previous and
succeeding frames, temporally coherent meshes can
be created. As a consequence, missing information on
body parts or dynamics in hairs and clothes, normally
leading to mesh discontinuities, can be supplemented.
Besides enabling a high-quality and detailed
reconstruction of fast performances of a captured
subject, accelerating the pipeline itself will improve
our work. A small speed-up can be achieved by
parallelizing the third step of our pipeline, the frame
extraction routine (cf. Table 1). Furthermore, and
even more essential with respect to a speed-up is the
frame sorting (see step 4b in Table 1). In our current
design, the mesh generation routine requires one
distinct directory with all frames from the different
perspectives per time frame. This structure is obtained
by the frame sorting routine, copying the single frames
based on the detected flashes to the distinct directories.
This brute force method should be replaced by a more
advanced approach using a designated data structure
working, e.g., with index shifts to group the single
frames into the individual time steps.
7 SUMMARY
Based on photogrammetry cages utilized to generate
a realistic, digital double of a captured human body,
we configured a 3D pipeline allowing for volumetric
video capture of a human subject’s performance. Our
results indicate that the pipeline is a first valuable step
towards fast and cost-efficient generation approaches
of authentic, high-quality animation recording for
digital doubles. For a successful future implementation,
the pipeline duration has to be further shortened, while
an additional mesh tracking step should be embedded
to enhance the mesh quality per animation time step.
REFERENCES
Achenbach, J., Waltemate, T., Latoschik, M. E., and Botsch,
M. (2017). Fast generation of realistic virtual humans.
In Proc. 23rd ACM Symp. Virtual Real. Softw. Technol.
- VRST ’17, pages 1–10.
Agisoft (2006). Agisoft PhotoScan. http://www.agisoft.com/.
[Online; last-accessed 17-October-2018].
Carranza, J., Theobalt, C., Magnor, M. A., and Seidel, H.-P.
(2003). Free-viewpoint video of human actors. In ACM
SIGGRAPH 2003 Papers, pages 569–577.
Casas, D., Volino, M., Collomosse, J., and Hilton, A.
(2014). 4D Video Textures for Interactive Character
Appearance. Computer Graphics Forum.
Collet, A., Chuang, M., Sweeney, P., Gillett, D., Evseev, D.,
Calabrese, D., Hoppe, H., Kirk, A., and Sullivan, S.
(2015). High-quality streamable free-viewpoint video.
ACM Trans. Graph., 34(4):69:1–69:13.
Dou, M., Fuchs, H., and Frahm, J.-M. (2013). Scanning
and tracking dynamic objects with commodity depth
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
260

cameras. 2013 IEEE Int. Symp. on Mixed and
Augmented Reality (ISMAR), pages 99–106.
Dou, M., Khamis, S., Degtyarev, Y., Davidson, P., Fanello,
S. R., Kowdle, A., Escolano, S. O., Rhemann, C.,
Kim, D., Taylor, J., Kohli, P., Tankovich, V., and
Izadi, S. (2016). Fusion4d: Real-time performance
capture of challenging scenes. ACM Trans. Graph.,
35(4):114:1–114:13.
Feng, A., Rosenberg, E. S., and Shapiro, A. (2017). Just-
in-time, viable, 3-d avatars from scans. Computer
Animation and Virtual Worlds, 28(3-4):e1769. e1769
cav.1769.
Garsthagen, R. (2014). An open source, low-cost, multi
camera full-body 3d scanner. In Proc. of 5th Int. Conf.
on 3D Body Scanning Technologies, pages 174–183.
Guo, K., Xu, F., Yu, T., Liu, X., Dai, Q., and Liu, Y. (2017).
Real-time geometry, albedo, and motion reconstruction
using a single rgb-d camera. ACM Trans. Graph., 36(3).
Jones, D. (2013). Picamera.
https://picamera.readthedocs.io/en/release-1.10/.
[Online; last-accessed 17-October-2018].
Lucas, G., Szablowski, E., Gratch, J., Feng, A., Huang,
T., Boberg, J., and Shapiro, A. (2016). The effect of
operating a virtual doppleganger in a 3d simulation. In
Proc. of the 9th Int. Conf. on Motion in Games, pages
167–174. ACM.
Newcombe, R. A., Fox, D., and Seitz, S. M. (2015). Dynamic-
fusion: Reconstruction and tracking of non-rigid scenes
in real-time. 2015 IEEE Conf. on Computer Vision and
Pattern Recognition (CVPR), pages 343–352.
Shrestha, P., Weda, H., Barbieri, M., and Sekulovski, D.
(2006). Synchronization of multiple video recordings
based on still camera flashes. In Proc. of the 14th ACM
Int. Conf. on Multimedia, pages 137–140.
Vlasic, D., Baran, I., Matusik, W., and Popovi
´
c, J. (2008). Ar-
ticulated mesh animation from multi-view silhouettes.
ACM Trans. Graph., 27(3):97:1–97:9.
Wang, R., Wei, L., Vouga, E., Huang, Q., Ceylan, D.,
Medioni, G., and Li, H. (2016). Capturing dynamic
textured surfaces of moving targets. In Computer
Vision – ECCV 2016, pages 271–288, Cham.
Wauck, H., Lucas, G., Shapiro, A., Feng, A., Boberg, J.,
and Gratch, J. (2018). Analyzing the effect of avatar
self-similarity on men and women in a search and
rescue game. In Proc. of the 2018 CHI Conf. on Human
Factors in Computing Systems, pages 485:1–485:12.
Volumetric Video Capture using Unsynchronized, Low-cost Cameras
261
