
A Novel Multispectral Lab-depth based Edge Detector for Color Images
with Occluded Objects
Safa Mefteh
1
, Mohamed-B
´
echa Ka
ˆ
aniche
1
, Riadh Ksantini
1,2
and Adel Bouhoula
1
1
Digital Security Research Lab, Higher School of Communication of Tunis (Sup’Com), University of Carthage, Tunisia
2
University of Windsor, 401, Sunset Avenue, Windsor, ON, Canada
Keywords:
Multispectral Edge Detection, Lab-D Image, Gradient based Approach, Occlusion Handling.
Abstract:
This paper presents a new method for edge detection based on both Lab color and depth images. The principal
challenge of multispectral edge detection consists of integrating different information into one meaningful
result, without requiring empirical parameters. Our method combines the Lab color channels and depth infor-
mation in a well-posed way using the Jacobian matrix. Unlike classical multi-spectral edge detection methods
using depth information, our method does not use empirical parameters. Thus, it is quite straightforward and
efficient. Experiments have been carried out on Middlebury stereo dataset (Scharstein and Szeliski, 2003;
Scharstein and Pal, 2007; Hirschmuller and Scharstein, 2007) and several selected challenging images (Ro-
senman, 2016; lightfieldgroup, 2016). Experimental results show that the proposed method outperforms recent
relevant state-of-the-art methods.
1 INTRODUCTION
Edge detection is one of the most prominent problems
in the field of image processing (Zhang et al., 2016;
Saurabh et al., 2014; Silberman et al., 2014). It has
an important role in many computer vision algorithms
and is considered as a fundamental and crucial step
particularly for segmentation, feature extraction and
object recognition. In order to perform a good edge
detection, one should tackle several challenges: vari-
ability of illumination, occlusions, density of edges in
the scene and noises (Nadernejad et al., 2008). Based
on the type of the image, we can identify three cate-
gories of methods for edge detection: grayscale image
edge detection, color image edge detection and Color-
Depth image edge detection (Zhang et al., 2016).
In this paper, we present a novel method for edge
detection by combining both color information and
depth information in well-posed way without using
empirical parameters. First, we apply on color image
the L
0
gadient algorithm in order to suppress noi-
ses, while preserving important edges (Xu et al.,
2011). Second, we compute the first derivative for
each image component (Lab colors and Depth infor-
mation). More precisely, for each pixel of a multis-
pectral image, we form a Jacobian matrix by using
the first derivatives. Then, for each pixel, in order to
tease out the pairwise relations of the columns of the
proposed Jacobian matrix, we perform product of this
latter and its transpose. Last, we select the maximal
Eigen value of the resulting matrix as edge informa-
tion. The main advantage of our method is that we do
not use empirical parameters and that is a quite straig-
htforward efficient method. Our proposed approach
has been compared to both Isola et al. (Isola et al.,
2014) and Asif et al. (Asif et al., 2016). These two
methods were chosen because they twin multi chan-
nels into one meaningful result, as the principle of our
method. The approach has been validated on Midd-
lebury stereo dataset (Scharstein and Szeliski, 2003;
Scharstein and Pal, 2007; Hirschmuller and Schar-
stein, 2007) and several selected challenging images
(lightfieldgroup, 2016; Rosenman, 2016).
The remaining of this paper is organized as fol-
lows. The next section 2 overviews the state-of-the-
art for edge detectors. Section 3 describes the pro-
posed method in details. Experimental protocol and
results are presented and discussed in section 4. Fi-
nally, section 5 concludes this work by overviewing
the contribution and pointing out issues for future de-
velopment.
272
Mefteh, S., Kaâniche, M., Ksantini, R. and Bouhoula, A.
A Novel Multispectral Lab-depth based Edge Detector for Color Images with Occluded Objects.
DOI: 10.5220/0007380502720279
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 272-279
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
An edge can be described as an acute change in lumi-
nosity. Through the past years, many researchers have
concentrated on implementing algorithms for grays-
cale images in order to detect edges effectively. These
approaches are classified into two broad categories:
(i) Gradient based edge detection and (ii) Laplacian
based edge detection. In a gradient based edge de-
tection, one looks for the extrema in the first order
derivative of the image to find edges. Several met-
hods have been developed, such as, the Sobel ope-
rator (Sobel, 1970),Prewitt operator (Prewitt, 1970),
Roberts operator (Roberts, 1963) and Krish operator
(Krish, 1970). These classical operators are characte-
rized by their simplicity. Also, because of the approx-
imation of gradient magnitude, the detection of edges
and their orientations is simple. However, these ope-
rators are sensitive to the noise. In fact, very high
noise will degrade the magnitude of the edges which
will most probably decrease the accuracy of edge de-
tection. Concerning the Laplacian based edge de-
tection, one searches for zero crossings in the second
order derivative of the image to find edges. A set of
algorithms have been implemented like Laplacian of
Gaussian (LoG) (Marr and Hildreth, 1980) and Diffe-
rence of Gaussian (DoG) (Davidson and Abramowitz,
1998). Methods of this category are able to find the
correct places of edges and their orientations, but they
fail at the corners, curves and where the gray level
pixel intensity varies due to illumination changes.
Since then, some other refined algorithms have
been developed to overcome these limitations, such
as, the Canny edge detector (Canny, 1986) which per-
forms a better detection performance under noisy con-
ditions. Actually, Canny’s algorithm has the advanta-
ges of finding the best error rate, in order to detect
edges efficiently. Although the canny edge detector is
one of the most widely used edge detectors, it suffers
from some drawbacks which include missing edge’s
junctions. With the use of Gaussian kernel in order
to reduce the noise signal, the localization of edges
is harder and inaccurate (Perez and Dennis, 1997).
Canny
´
s method is also a high time consuming de-
tector. Moreover, it requires setting threshold values
adaptively for each image scene.
To improve the accuracy of edge detection, several
researches have already used color image for complex
situations because it provides more information com-
pared to the grayscale image (monochromatic image).
According to Novack and Shafer (Novack and Shafer,
1987), 90% of edge information in color images can
be found as well as in grayscale images. However,
the remaining 10% may be important in certain com-
puter vision tasks like image segmentation and image
restoration. Thus, authors are convinced that by ana-
lyzing the color information, the efficiency and the
performance of edge detectors will be improved. For
instance, Isola et al.(Isola et al., 2014) proposed to de-
tect boundaries through the use of a statistical associ-
ation based on pointwise mutual information (PMI).
By using pixel color and variance information, aut-
hors achieve a good contour detection results. Xin
et al.(Xin et al., 2012) presented a revised version of
Canny algorithm for color images. This approach in-
volves the concept of quaternion weighted average fil-
ter and whole vector analysis. These algorithms have
shown better results than the gray level image proces-
sing method. Using color information, the algorithm
balances between noise elimination and edge preser-
vation. Also, Xu et al. (Chen et al., 2012) introduced
a novel multispectral image edge detection algorithm.
According to authors, a multispectral image can be
well expressed via Clifford algebra which is so suit-
able for processing multidimensional data. The solu-
tion consists of computing a Clifford gradient using
the RGB channels. Then through the Clifford diffe-
rentiation method applied at each point and compa-
ring to its neighbor points, authors determine whether
it is an edge point using a chosen threshold. Although
these methods provided an efficient detection of the
objects in the scene, they usually failed in complex
situations (e.g. stacked or occluded objects). They
were unable to differentiate between occluded objects
having same color. Thus, the boundaries of these ob-
jects will be hardly extracted. Obviously, in this case,
using only color information will be insufficient.
With the development of image acquisition de-
vices, depth information can now be easily extrac-
ted. Depth information is becoming more popular
and more interesting to deal with occluded objects. In
fact, the algorithms of edge detection based on color
information paired with depth information has shown
excellent results of edge detection and differentiation
notably for same occluded objects. Among the most
recent relevant RGB-D edge detection algorithms, we
can mention the work of Asif et al. (Asif et al., 2016),
where the authors have presented a novel object seg-
mentation approach for highly complex indoor sce-
nes. The solution starts with an initial segmentation
step which consists of partitioning the scene into dis-
tinct regions. For this purpose, based on color-depth
image, authors generated a single multi-scale orien-
ted gradient signal. This latter is a linear combination
of oriented gradients determined independently from
six channels: three components of Lab color space,
depth information, surface normal and surface curva-
ture maps of the scene. After that, authors applied a
A Novel Multispectral Lab-depth based Edge Detector for Color Images with Occluded Objects
273

penalization step on this boundary response by fixing
a user-selected threshold to suppress false boundary
responses. The proposed approach improves the per-
formance of the segmentation of stacked and occlu-
ded objects. However, this method integrates empiri-
cal parameters for generating the boundary response
which can be seen as a limitation. Also, the selected
threshold must be adjusted adaptively for each image.
Authors of (Yue et al., 2013) presented a RGB-D ba-
sed edge detection solution that combined both color
data and depth data. First, authors applied Canny edge
detector separately to both color and depth images in
order to extract color-edges image and depth-edges
image. Second, optimized depth-edges also, are re-
trieved by optimizing the depth-edges using the origi-
nal color image, and optimized color-edges are com-
puted from the optimization of color-edges, using the
original depth image. Last, the final result is formed
by fusing both optimized depth-edges image and op-
timized color-edges image. This approach can easily
extract the same color occluded objects. However, the
algorithm consists of several time consuming steps.
In order to overcome the aforementioned pro-
blems, a novel algorithm is proposed for edge de-
tection by combining both color information and
depth information in well-principled way. The main
principle of our Lab-D gradient based approach is
to integrate different information into one meaning-
ful combination, without requiring empirical parame-
ters for edge enhancement. That’s why, we mixed
all channels into a Jacobian matrix. Thus, it is quite
straightforward and efficient. Results show that the
proposed method outperforms recent state-of-the-art
methods.
3 PROPOSED METHOD
Based on the work of Drewniok (Drewniok, 1994) for
the multispectral gradient computation, we present an
approach to separate occluded objects using as input
color image and depth image of the scene. Our overall
edge detection approach can be split into two main
steps:
1. Preprocessing step.
2. Performing the gradient-based edge detection in
multi-dimensions.
3.1 Preprocessing Step
According to Cheng et al. (Cheng et al., 2001), se-
lecting the best color model affect the quality of de-
tection process. The RGB color space is suitable for
color display. But due to the high correlation among
the R, G and B components, RGB is considered not
good for color scene segmentation or detection. Thus,
we choose to use the CIE(l*a*b*) color space instead.
Compared to the RGB, CIE(l*a*b*) color space re-
presents color and intensity information more inde-
pendently and simply. Indeed, CIE(l*a*b*) can me-
asure efficiently a small color difference as this latter
can be calculated as the Euclidean distance between
two color points. In addition, by modifying simply
the output curves in a and b channels, the CIE(l*a*b*)
can be used to make accurate color balance correcti-
ons, or to adjust the lightness contrast using the L
channel. Authors in (Ganesan P. and Rajkumar, 2010)
review a segmentation method based on CIE(l*a*b*)
color space. The results show that the implementation
based on CIE(l*a*b*) outperform other color spaces
with various types of noises and using various edge
detectors algorithms. So, the CIE(l*a*b*) seems to
be a suitable color model for edge detection.
A Lab-D image is composed of pair of images
I
Color-D
= (I
Color
, I
Depth
), where I
Color
denotes a tradi-
tional three-channel color image (L channel, a chan-
nel and b channel) and I
Depth
denotes depth image (D
channel). Since all edge detection results are easily
affected by image noise, it is important to filter out
any noise to avoid false positives. Usually, in order to
smooth I
Color
images, the Gaussian filter is used. Ho-
wever, when filtering noise using the Gaussian smoo-
thing algorithm, some regions are blurred. Thereby,
the associated edges will not be extracted. Xu et al.
(Xu et al., 2011) presented a novel algorithm that pre-
serves edges after smoothing process. For this rea-
son, authors used L
0
gradient minimization, which
can remove small-magnitude gradient. The method
suppressed low-amplitude details. Mean-while it glo-
bally optimized the edge detection process. There-
fore, the L
0
gradient algorithm is utilized in this pa-
per. The gradient operator ∇ applied to a scalar image
function I is defined as follows.
∇I =
∂I
∂x
∂I
∂y
. (1)
The idea is that the gradient’s direction determines the
acute change of intensity, and the gradient’s magni-
tude corresponds to the strength of change. But the
gradient operator acts only on scalar functions. This
is why we compute the first order Gaussian derivative
by the convolution of the image I with the Gaussian
function and apply the gradient on them.
∂(I ∗ G)(x, y)
∂x∂y
= I ∗
∂G(x, y)
∂x∂y
,
=
I ∗
∂G(x,y)
∂x
, I ∗
∂G(x,y)
∂y
,
(2)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
274

where the 2-D Gaussian function G(x,y) is represen-
ted by equation 3:
G(x, y) =
1
2πσ
2
exp(−
x
2
+ y
2
2σ
2
). (3)
In practice, the convolution is done between the con-
sidered image and the convolution masks in both x
and y directions. The pair of convolution masks G
x
and G
y
are computed using equations 4 and 5:
G
x
=
−x
2πσ
4
exp(−
x
2
+ y
2
2σ
2
). (4)
G
y
=
−y
2πσ
4
exp(−
x
2
+ y
2
2σ
2
). (5)
3.2 Performing the Gradient-based
Edge Detection in Multi-dimensions
In order to take into account all information from co-
lor image and depth image, the multi-spectral image
function
−→
S (x, y) forms a vector of m scalars, where m
represents the total of channels derived from I
Color-D
.
−→
S (x, y) =
S
1
(x, y)
.
.
.
S
m
(x, y)
. (6)
In our method m = 4 (three-channels of the I
Color
and
one-channel of I
Depth
), So:
−→
S (x, y) =
I
L
(x, y)
I
a
(x, y)
I
b
(x, y)
I
D
(x, y)
, (7)
where I
L
denotes the L channel image, I
a
denotes the a
channel image, I
b
denotes the b channel image and I
D
denotes the depth channel image for each component
of
−→
S , we compute separately its Gaussian derivative
∇S
i
, where i ∈ {1...m} by applying the equation 2.
∂S
i
(x, y)
∂x∂y
=
S
i
∗ G
x
, S
i
∗ G
y
,
=
S
ix
, S
iy
.
(8)
Then, for each pixel (x,y), we form the Jacobian ma-
trix J with the Gaussian derivatives as shown below:
J =
∂S
1
(x,y)
∂x∂y
.
.
.
∂S
m
(x,y)
∂x∂y
=
S
1x
(x, y) S
1y
(x, y)
. .
. .
. .
S
mx
(x, y) S
my
(x, y)
. (9)
In our work, the Jacobian matrix is represented in
equation 10 as follows:
J =
∂I
L
(x,y)
∂x∂y
∂I
a
(x,y)
∂x∂y
∂I
b
(x,y)
∂x∂y
∂I
D
(x,y)
∂x∂y
=
I
Lx
(x, y) I
Ly
(x, y)
I
ax
(x, y) I
ay
(x, y)
I
bx
(x, y) I
by
(x, y)
I
Dx
(x, y) I
Dy
(x, y)
. (10)
The multi-spectral gradient approach is then the com-
bination between all the image components derivati-
ves, which have been already illustrated in the Jaco-
bian matrix J, in order to get magnitude and direction
of the strongest change at each pixel position. Then,
we compute the J
T
J matrix to find the best compro-
mise between all image gradient components and to
avoid the use of empirical values introduced in (Asif
et al., 2016).
J
T
J =
g
11
g
12
g
21
g
22
, (11)
where
g
11
= S
2
1x
+ ... + S
2
mx
,
g
22
= S
2
1y
+ ... + S
2
my
,
g
12
= g
21
= S
1x
S
1y
+ ... + S
mx
S
my
.
In our case, we compute g
11
, g
12
, g
21
and g
22
as fol-
lows:
g
11
= I
2
Lx
+ I
2
ax
+ I
2
bx
+ I
2
Dx
,
g
22
= I
2
Ly
+ I
2
ay
+ I
2
by
+ I
2
Dy
,
g
12
= g
21
= I
Lx
I
Ly
+ I
ax
I
ay
+ I
bx
I
by
+ I
Dx
I
Dy
.
The magnitude and the direction of the strongest
change of
−→
S corresponds to the greatest eigenvalue
and its associated eigenvector of the matrix J
T
J, re-
spectively. Actually, according to Drewniok (Drew-
niok, 1994), this extremum can be exploited through
the Rayleigh-quotient of the matrix J
T
J. In fact,
this is important since the extremum of the Rayleigh-
quotient matrix are found through the eigenvalues of
the matrix. As our multispectral function
−→
S is defi-
ned on two directions x and y, a 2x2 matrix J
T
J is
found. Then, two eigenvalues λ
1
and λ
2
are calcula-
ted for each point (x,y), where λ
max
= max(|λ
1
|, |λ
2
|).
Obviously, λ
max
is given by:
λ
max
=
g
11
+ g
22
2
+
r
g
2
12
+
(g
11
+ g
22
)
2
4
. (12)
The direction ϕ
max
can be computed with equation 13:
ϕ
max
=
1
2
∗ arctan
2 ∗ g
12
g
11
− g
22
. (13)
Finally, at this step an edge image is resulted as
A Novel Multispectral Lab-depth based Edge Detector for Color Images with Occluded Objects
275

shown in equation 14:
I
edge
=
λ
max
(1, 1) . . . λ
max
(1, w)
. . .
. . .
. . .
λ
max
(h, 1) . . . λ
max
(h, w)
,
(14)
where h denotes the height of the source image and w
denotes the width of the source image.
4 EXPERIMENTAL EVALUATION
AND RESULTS
In this section, in order to tease out the advantage of
using the depth information, we compare our results
with both (Isola et al., 2014; Asif et al., 2016) results.
These comparisons are performed on RGB-D images
and the results are illustrated in Figure 1 and Table 1.
4.1 Experimental Protocol
Our experimental protocol consists of evaluating our
method in terms of edge detection accuracy on stac-
ked and occluded objects. To quantify the perfor-
mance, we use the publicly available Middlebury ste-
reo dataset (Scharstein and Szeliski, 2003; Scharstein
and Pal, 2007; Hirschmuller and Scharstein, 2007). It
contains RGB-D images of different scenes, in which
a large variety of objects (cones, plastic, lampshades
and circles) are stacked and occluded over each ot-
her in several complicated layouts and with someti-
mes same colors. This is a motivating dataset for ob-
ject detection to separate distinct or same occluded
objects. Then, a collection of images with their cor-
respondent depth images (lightfieldgroup, 2016; Ro-
senman, 2016) contains a variety of images which are
characterized by different illumination settings, con-
taining several objects with the same color and evi-
dently occluded. The experiments show that our pro-
posed method, using CIE(l*a*b*) color images and
disparity map, is able to effectively handle the occlu-
sion cases in complex scenes with short time consu-
ming. In all experiments, for the L
0
smoothing algo-
rithm, we selected the values λ = 0.005 and K = 2.0.
All methods are tested using the same system with
an Intel CORE i5 CPU, 8 GByte RAM and Intel(R)
HD Graphics 3000.
4.2 Validation
Here we give details about the configuration that we
have used for the relative works. For the method of
(Asif et al., 2016), in order to get the best gradient
response for each channel (L, a, b or D), three pre-
liminary empirical parameters are setted (ψ1 = 0.95,
ψ2 = 0.5 and ψ3 = 0.5). Also, for the penalization
step, a user selected threshold δb is asked for every
image. In our experiments, when implementing Asif
et al. (Asif et al., 2016) method we kept fixed and set
to δb = 0.14 for all images. For (Isola et al., 2014),
we choose to run experiments for two cases: (i)by
only considering color information(Lab channels) as
the authors suggested (PMI) and (ii)by considering
both color information and depth information too to
see what will be changed by adding depth informa-
tion (PMID).
The Figure 1.(f) illustrates the results of our met-
hod compared to selected works (Isola et al., 2014;
Asif et al., 2016) on several test images. From this fi-
gure, we can clearly notice that the proposed RGB-D
gradient based method outperforms significantly the
state-of-the-art methods. Moreover, we can see that
the salient objects in each image are efficiently de-
tected. Beside this, we can see that object occlusion is
perfectly handled and edges has been appeared signi-
ficantly. In Figure 1.(c), Figure 1.(d) and Figure 1.(e),
we can notice that some of edges were not preser-
ved, which were preserved by our technique. To vi-
sualize these areas clearly, we have highlighted them
with red circles where edge detection was failed on
the competent methods. We have also measured the
computation time for these approaches. The results
are resumed in the Table 1. We have shown in terms
of time-consuming that our method works faster than
other methods.
4.3 Discussion
In our method, the only parameters used are λ and
K for smoothing with the L
0
gradient minimization.
After several attempts, we have noticed that λ = 0.005
and K = 2.0 are suitable for most images.
For Asif et al. method (Asif et al., 2016), in or-
der to achieve a good edge detection, we have to
choose a user selected threshold parameter δ
b
suita-
ble for each image. Also, for Isola et al. method
(Isola et al., 2014), several parameters are selected
beforehand by authors, such as, ρ (free parameter for
optimizing segmentation performance), d (Gaussian
distance) and Z (a normalization constant). Experi-
ments show that these parameters affect dramatically
the edge detection performance in terms of quality
and speed. This is why, we have chosen to propose
and implement an unsupervised method which does
not depend from any parameter and is computatio-
nally adaptive to any type of image. So, for the ex-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
276
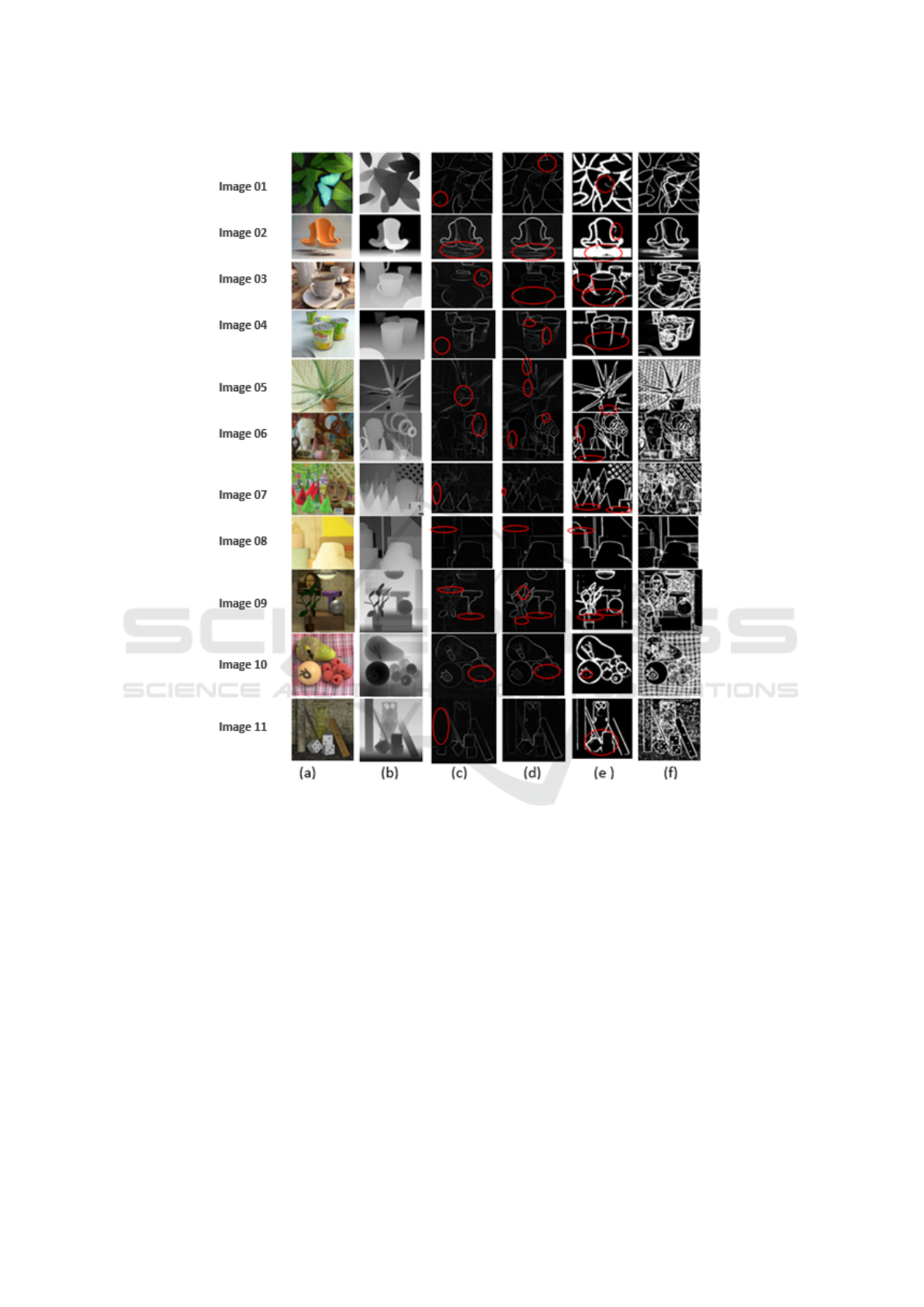
Figure 1: Edge detection results by applying different methods on input images (a) RGB image and (b) depth image. (c) for
RGB information and (d) for both combined color and depth images are the results of Isola et al. (Isola et al., 2014). (e) is the
result of Asif et al. method (Asif et al., 2016). Finally, (f) represents the results of our method.
traction step of the gradient-based edge detection, we
have presented a well-principled edge detection met-
hod without using any empirical parameter by assem-
bling different Lab-D image channels into a Jacobian
matrix. This method is suitable for all images since
we are not supposed to choose any parameter accor-
ding to each image. Moreover, to reduce the noise in
some images (cf. figure1.(f)), we plan to adapt the
approach proposed by (Yue et al., 2013) as a post-
processing step. The main idea behind this method is
to rely on depth information to remove false-positive
edges.
5 CONCLUSION
A novel method for edge detection has been propo-
sed. Our method consists of acquiring two images
(Lab image and depth image). First of all, we apply
the L
0
gradient minimization algorithm on the Lab
image in order to suppress noises. Next, we compute
the first order gaussian derivative for each channel
separately. Then, we assemble these derivatives on
a Jacobian matrix. After that, in order to obtain the
pairwise relations of the columns of the proposed Ja-
cobian matrix, we perform a product of this latter and
A Novel Multispectral Lab-depth based Edge Detector for Color Images with Occluded Objects
277
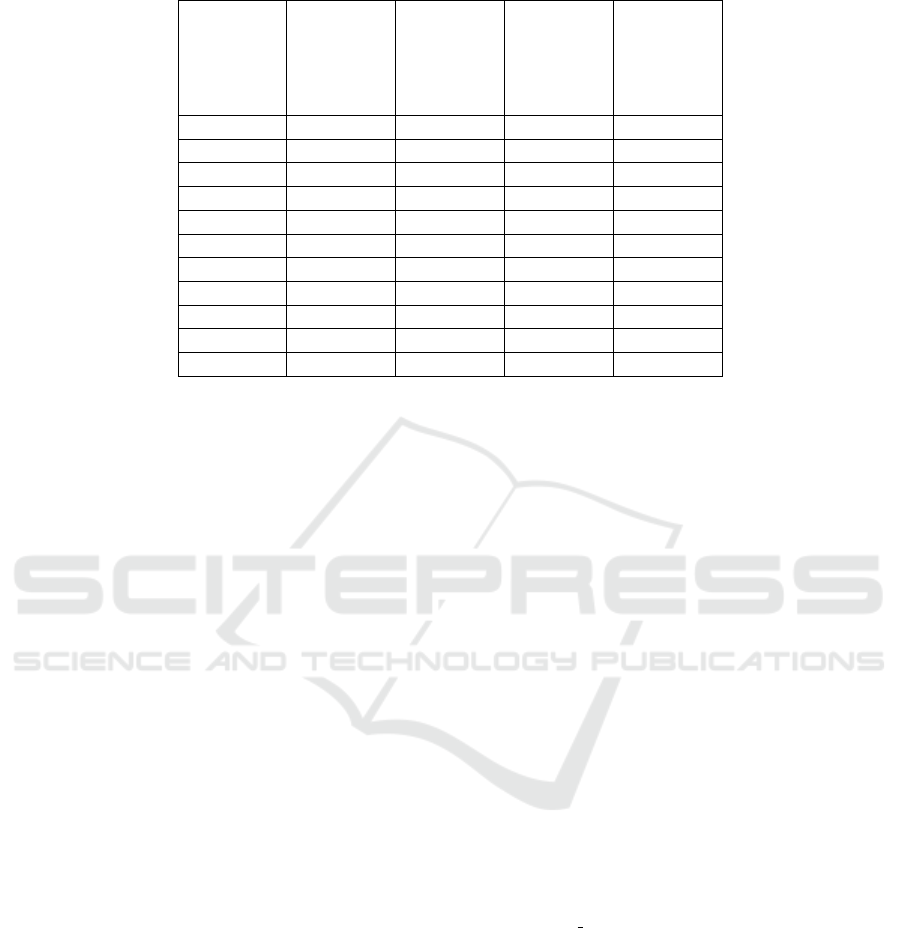
Table 1: Computation time in seconds for different Methods.
Test scene
No.
PMI (sec)
(Isola
et al.,
2014)
PMID
(sec)
(Isola
et al.,
2014)
Asif et al.
method
(sec) (Asif
et al.,
2016)
Our met-
hod (sec)
Image 01 3.15 3.07 0.86 0.539
Image 02 2.13 2.10 0.576 0.349
Image 03 7.68 7.40 1.516 1.127
Image 04 7.35 8.12 1.008 0.883
Image 05 13.80 13.47 1.536 1.305
Image 06 14.70 16.02 1.730 1.692
Image 07 14.69 15.27 1.407 1.253
Image 08 15.36 13.62 2.008 1.271
Image 09 13.44 12.90 1.950 1.129
Image 10 12.99 12.90 1.351 1.251
Image 11 12.61 12.69 1.370 1.136
its transpose. Finally, the maximal Eigen value of the
resulting matrix is selected as edge information.
Our main contribution consists of assembling all
the components of Lab image and depth image (L,a,b
and D) in a well-posed way without requiring any em-
pirical parameters.
Thus, experimental results show an improvement
compared to recent state-of-the-art methods (Isola
et al., 2014; Asif et al., 2016). In fact, our method
distinguishes occluded objects even if they have the
same color. Also, our method takes into account even
the small details in an image.
As future work, we plan to develop a post-
processing step which cleans the resulting image
from non-boundary edges, while preserving details as
much as possible. We will try to do not use any em-
pirical parameter. Then, we will use this method in a
blob detection algorithm.
REFERENCES
Asif, U., Bennamoun, M., and Sohel, F. (2016). Unsupervi-
sed segmentation of unknown objects in complex en-
vironments. Auton. Robots, 40(5):805–829.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 8(6):679–698.
Chen, X., Hui, L., WenMing, C., and JiQiang, F. (2012).
Multispectral image edge detection via clifford gra-
dient. SCIENCE CHINA Information Sciences,
55(2):260–269.
Cheng, H. D., Jiang, X. H., Sun, Y., and Wang, J. L. (2001).
Color image segmentation: Advances and prospects.
Pattern Recognition, 34:2259–2281.
Davidson, M. W. and Abramowitz, M. (1998). Molecular
expressions microscopy primer: Digital image proces-
sing - difference of gaussians edge enhancement algo-
rithm. Olympus America Inc., and Florida State Uni-
versity.
Drewniok, C. (1994). Multi-spectral edge some experi-
ments on data from landsat-tm. Int. Journal of Remote
Sensing, 15(18):3743–3765.
Ganesan P., V. R. and Rajkumar, R. I. (2010). Segmen-
tation and edge detection of color images using cie-
lab color space and edge detectors. Emerging Trends
in Robotics and Communication Technologies (INTE-
RACT) 2010 International Conference on IEEE, pages
393–397.
Hirschmuller, H. and Scharstein, D. (2007). Evaluation of
cost functions for stereo matching. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR), pages 1–8.
Isola, P., Zoran, D., Krishnan, D., and Adelson, E. H.
(2014). Crisp boundary detection using pointwise mu-
tual information. In ECCV.
Krish, R. A. (1970). Computer determination of the con-
stituent structure of biological images. Computer and
Biomedical Research, 4(3):315–328.
lightfieldgroup (2016). Heidelberg collaboratory for image
processing. http://lightfieldgroup.iwr.uni-heidelberg.
de/?page id=713. [Online; accessed 2018-05-16].
Marr, D. and Hildreth, E. (1980). Theory of edge detection.
207:187–217.
Nadernejad, E., Sharifzadeh, S., and Hassanpour, H. (2008).
Edge detection techniques: Evaluations and compa-
risons. Applied Mathematical Sciences, 2(31):1507–
1520.
Novack, C. L. and Shafer, S. A. (1987). Color edge de-
tection. In Proceedings DARPA Image Understanding
Workshop, volume 1, pages 35–37.
Perez, M. M. and Dennis, T. J. (1997). An adaptive im-
plementation of the susan method for image edge and
feature detection. In Proceedings of IEEE Conference
on Image Processing, volume 2, pages 394–397.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
278

Prewitt, J. M. S. (1970). Object enhancement and ex-
traction. Picture Processing and Psychopictorics,
10:15–19.
Roberts, L. G. (1963). Machine perception of three-
dimensional solids. PhD thesis, Massachusetts Insti-
tute of Technology, Dept. of Electrical Engineering.
Rosenman, R. (2016). Depth of field generator pro. http:
//www.dofpro.com/. [Online; accessed 2018-05-16].
Saurabh, G., Ross, G., Pablo, A., and Jitendre, M. (2014).
Learning rich features from rgb-d images for object
detection and segmentation. In Lecture Notes in Com-
puter Science, volume 8695, pages 345–360.
Scharstein, D. and Pal, C. (2007). Learning conditional
random fields for stereo. In IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Scharstein, D. and Szeliski, R. (2003). High-accuracy ste-
reo depth maps using structured light. In Proceedings
of the 2003 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, volume 1
of CVPR’03, pages 195–202.
Silberman, N., Shapira, L., Gal, R., and Kholi, P. (2014).
A counter completion model for augmenting surface
reconstructions. In Proc. ECCV, pages 488–503.
Sobel, I. E. (1970). Camera models and machine percep-
tion. PhD thesis, Stanford University, Calif., USA.
Xin, G., Ke, C., and Xiaoguang, H. (2012). An improved
canny edge detection algorithm for color image. In
IEEE 10th International Conference on Industrial In-
formatics, pages 113–117.
Xu, L., Lu, C., Xu, Y., and Jia, J. (2011). Image smoothing
via l0 gradient minimization. ACM Transactions on
Graphics (SIGGRAPH Asia), 30(6).
Yue, H., Chen, W., Wang, J., and Wu, X. (2013). Combining
color and depth data for edge detection. In Proceeding
of IEEE, 2013 International Conference on Robotics
and Biometrics (ROBIO), pages 928–933.
Zhang, H., Wen, Z., LIU, Y., and Xu, G. (2016). Edge de-
tection from rgb-d image based on structured forests.
Journal of Sensors, 2016. 10 pages.
A Novel Multispectral Lab-depth based Edge Detector for Color Images with Occluded Objects
279
