
Comparing Real Walking in Immersive Virtual Reality and in Physical
World using Gait Analysis
Andrea Canessa, Paolo Casu, Fabio Solari and Manuela Chessa
University of Genoa, Dept. of Informatics, Bioengineering, Robotics and Systems Engineering, Italy
Keywords:
Head-mounted Display, HTC-Vive, Walking in VR, Real Walking, Biomechanical Analysis.
Abstract:
One of the main goals of immersive virtual reality is to allow people to walk in virtual environments in an
ecological way. Several techniques have been developed in the literature: the use of devices such as omni-
directional treadmills, robotic tiles, stepping systems, sliding-based surfaces and human-sized hamster balls;
or techniques such as the walking-in-place. Conversely, real walk requires the precise tracking of the user,
performed on a large area, in order to allow him/her to explore the virtual environment without limitations.
This can be achieved by using optical tracking systems, or low cost off-the shelf devices, such as the HTC-
Vive tracking system. Here, we consider the latter solution and we aim to compare real walking in a virtual
environment with respect to walking in a corresponding real world situation, with the long term goal of using
it in rehabilitation and clinical setups. Moreover, we analyze the effect of having a virtual representation of the
user’s body inside the virtual environment. Several spatio-temporal gait parameters are analyzed, such as the
total distance walked, the patterns of velocity in each considered path, the velocity peaks, the step count and
step length. Differently from what can be typically found in the literature, in our preliminary results we did
not find significant differences between real walk in virtual environments and in a real world situation. Also
having the virtual representation of the body inside virtual reality does not affect the gait parameters. The
implication of these results for future research, in particular with respect to the specific considered setup, are
discussed.
1 INTRODUCTION
In this paper, we aim to compare real walking in a
virtual environment (VE) with respect to walking in
a corresponding real world situation, to investigate
whether it is possible a natural walk in virtual real-
ity (VR). Moreover we investigate the role of having
a virtual body in walking tasks.
The problem of walking in immersive VR has
been extensively addressed by researchers in the last
years, due to its implication in the reduction of sick-
ness, in the increase of the sense of presence and in
the improvement of the overall user experience (Kim
et al., 2017). Moreover, natural walking in immersive
VR can improve the natural interaction of the users
inside the VEs, since they can freely explore it.
In the literature (see (Nabiyouni and Bowman,
2016) for a taxonomy of walking-based locomotion
techniques in VR), the problem of achieving unlim-
ited area for locomotion in VR has been addressed by
developing various devices such as omni-directional
treadmills, robotic tiles, stepping systems, sliding-
based surfaces and human-sized hamster balls. All
these techniques employ stationary or moving sur-
faces to allow the user staying (almost) fixed in a lim-
ited physical space while walking in VR. To avoid
the use of external devices, several systems use the
walking-in-place technique. Also in this case, users
can explore a VE larger than the physical environ-
ment. Nevertheless, all these techniques are quite far
from providing the user an experience similar to the
one experienced by real walking. The main problems
hampering real walking in VR are related to the lack
of systems capable to track the users’ movements in
a sufficiently large portion of space, and capable to
transfer users’ movements into VR. Nowadays, typi-
cal setups for implementing real walking are based on
optical tracking systems, e.g. see (Nabiyouni et al.,
2015; Janeh et al., 2017b).
The different solutions to allow people’s locomo-
tion in VR have been analyzed and compared in the
literature. In (Nabiyouni et al., 2015), the authors
compared a high-fidelity real walking with a low-
fidelity gamepad technique and a medium-fidelity lo-
comotion interface (the Virtusphere). 16 optitrack
flex 3 cameras tracked the users movements at a 100
Canessa, A., Casu, P., Solari, F. and Chessa, M.
Comparing Real Walking in Immersive Virtual Reality and in Physical World using Gait Analysis.
DOI: 10.5220/0007380901210128
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 121-128
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

Hz sampling frequency. As a result, in line with the
McMahan hypothesis (McMahan et al., 2012), the use
of the virtusphere (medium-fidelity) produced worst
performance than those obtained using the gamepad
(low-fidelity).
By considering real walking setups, one of the
main issues is the fact that isometric mappings, i.e.
replicating the exact amount of movement of the
users’ head inside the VE, are often misperceived by
people walking in VR (Steinicke et al., 2010; Janeh
et al., 2017b). In particular, people do not perceive
distances in VR as in a corresponding real-world sit-
uation. To mitigate the issue, in (Steinicke et al.,
2010), translation gains are introduced, though the re-
sults presented in (Janeh et al., 2017b) show that fur-
ther investigations on this aspect are needed. Also
the effect of having a virtual representation (i.e. an
avatar) inside the VE has been addressed, with re-
spect to depth perception. In (Valkov et al., 2016),
the authors presented the results of an evaluation of
the users distance perception with different avatar rep-
resentations, by showing that the anthropometric fi-
delity of the avatar has stronger effect on the distance
perception than a realistic representation.
Several researchers addressed the problem of un-
derstanding whether low-cost and off-the-shelf solu-
tions can be valid for scientific purposes, and whether
these setups, designed for entertainment purposes,
cause undesired effects on the users. As an exam-
ple, in (Chessa et al., 2016b), the authors investigated
the quality of a commercial low-cost VR headset, the
Oculus Rift DK2, with respect to the sense of pres-
ence (Slater et al., 1994) and the cybersickness. More
recently, in (Niehorster et al., 2017), an analysis of the
precision and accuracy of the HTC-Vive VR headset
is presented. The authors conclude that such a system
is maybe affected by some errors due to the fact that
a tilting of the reference plane can occur, especially
when the sensors loose the tracking. Nevertheless, the
quantitative error measures they reported are not sig-
nificant with respect to the application described in
this paper.
We should also take into account that, in the lit-
erature, several studies show the relationship among
walking in VR and gait instability. In (Hollman et al.,
2007), the authors analyzed ten healthy volunteers
walking on an instrumented treadmill in a VR envi-
ronment and a non-VR environment. They showed
that subjects walked in the VR environment with in-
creased magnitudes and rates of weight acceptance
force and with increased rates of push-off force. The
gait deviations reflect a compensatory response to vi-
sual stimulation that occurs in the VR environment,
suggesting that walking in a VR environment may in-
duce gait instability in healthy subjects. Previoulsy,
in (Mohler et al., 2007), the authors showed that gait
parameters within a head-mounted display (HMD)
VE are different than those in the real world. A
person wearing a HMD and backpack walks slower,
and takes a shorter stride length than they do in a
comparable real world condition. Though comparing
walking in VE with respect to walking in real condi-
tions, all these previous works did not consider nat-
ural walking, but they addressed the problem by us-
ing treadmills. This is probably due to technologi-
cal constraints, since the possibility of implementing
low cost natural walking (yet in a limited space) is a
quite recent achievement. A recent paper (Janeh et al.,
2017a) consider real walking in immersive VE with
an HTC Vive HMD, by comparing the behaviour of
adults and younger people. The authors showed that
older adults walked very similarly in the real and VE
in the pace and phasic domains, which differs from
the results found in younger adults. In contrast, the
results indicated a different base of support for both
groups while walking within a VE and the real world.
They also considered non-isometric mappings, and
they found in both younger and older adults an in-
creased divergence of gait parameters in all domains
correlating with the up- or down-scaled velocity of vi-
sual self-motion feedback.
In this paper, we decided to implement and an-
alyze walking by using first-person perspective (i.e.
direct mapping between the head position of the user
and the virtual camera inside the VE). In particular,
we considered a commercial low-cost solution that we
used both for the VR setup (i.e. for the tracking of
the users’ movements, and thus for the implementa-
tion of real walking) and also for the gait analyzes.
The main goal is to achieve natural walking in a sim-
ple setup, affordable by everyone, with the long term
aim of using it in rehabilitation and clinical setups. A
precise biomechanical analysis of the locomotion in
our setup is out of the scope of this paper, and it will
be considered in a future work. Indeed, the rationale
underlying our contribution is the validation of a low-
cost setup, based on the HTC-Vive device, designed
for a future clinical use. As an example, individuals
with neurodegenerative diseases such as Parkinsons
disease, Multiple Sclerosis, dementia syndromes due
to the deficits of motor and cognitive functions, typ-
ically present gait dysfunctions. Virtual Reality rep-
resents an attractive option to investigate, in a con-
trolled way, the locomotor difficulties by replicating
the real-life situations when dramatic and potentially
dangerous gait problems occur (e.g., walking through
a crowded space, crossing the street at the green light
or entering an elevator before the door closes). In
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
122
particular, there is a great need of a refinement of
VR to represent more closely the real-life situations
when gait problems occur for a better understand-
ing of this phenomenon and for new and personalized
treatments. Our aim is to have an affordable VR sys-
tem with performances that are well suited to specific
clinical protocols based on real walking.
Here, in order to understand how people perceive
depth in VR, and the behaviour of walking in an im-
mersive VE, we considered three different conditions:
(i) real walking in a VE, without a representation of
own body inside VR; (ii) real walking in a VE, with a
virtual representation of own body inside VR (in par-
ticular an avatar of the users’ legs); (iii) walking in a
real-world situation, consistent with the VE.
The main original contributions of this paper are:
• the quantitative evaluation of real walking in
VR, by analyzing gait parameters. In particular,
we will compute and compare the total distance
walked by the users, the number of steps to cover
a given part of the path, maximum peak veloc-
ity, step size, by considering the three described
conditions. Moreover, we analyze the velocity
profile of walking. It is worth noting that we do
not take into consideration translation gains tech-
niques, such as the one proposed by (Steinicke
et al., 2010; Janeh et al., 2017b);
• a comparison between the behavior of users who
have not a virtual representation of themselves in-
side the VE with respect to users who can see
an avatar replicating their movements inside the
VE (Chessa et al., 2016a; Valkov et al., 2016).
The paper is organized as follows: in Section 2
we describe the setup, the experimental protocol and
the gait parameters we consider and analyze; in Sec-
tion 3 we present and discuss the outcome of the ex-
periments; finally in Section 4 we discuss the possible
implications of the obtained results and how to further
analyze and improve our setup.
2 MATERIALS AND METHODS
2.1 Participants
Eighteen healthy volunteer subjects (10 female and 8
male, median ages 24, range 19-33) participated in
this study and completed the experiment. The par-
ticipants are students or members of our University.
All subjects gave written informed consent in accor-
dance with the Declaration of Helsinki. They wore the
HTC-Vive head-mounted-display for about 15 min-
utes during the experiment and all of them were naive
7.0m
Base
Station A
6.4m
Base
Station B
0.85m
x
z
Goal
Start
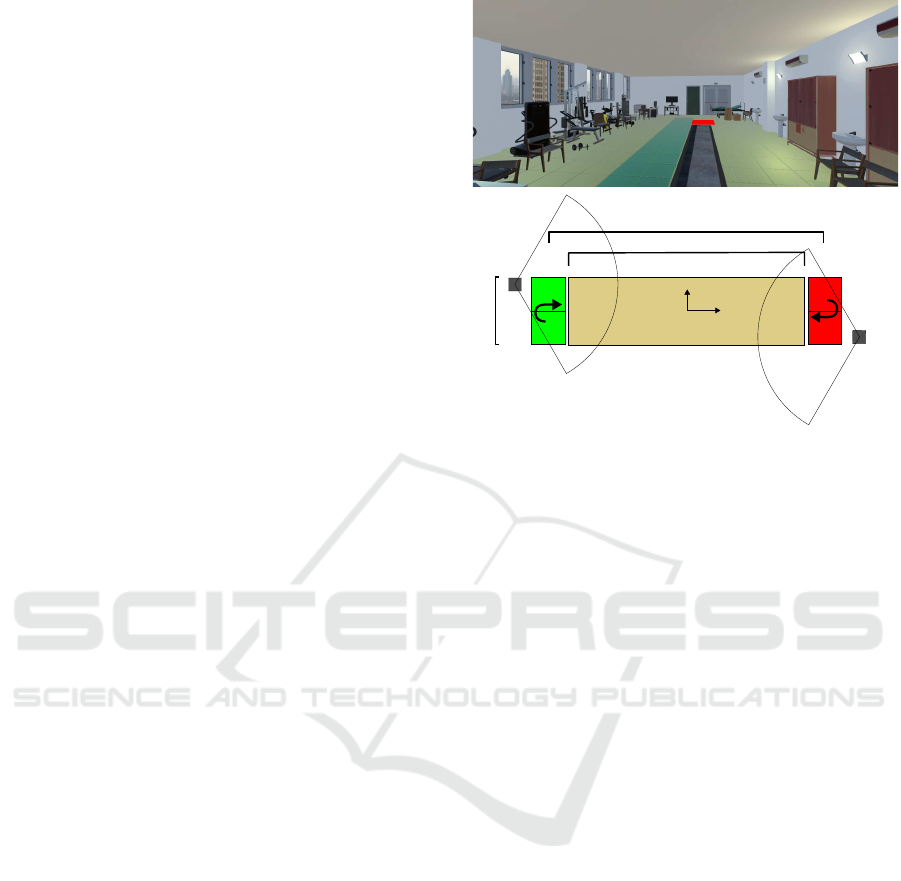
Figure 1: Schematic setup of experiment. (Top) The partic-
ipants view by wearing the HMD. (Bottom) A sketch of the
setup representing the position of the base stations, inver-
sion zones and walkway with the dimensions. The reference
system is centered on walkway.
to the experimental conditions, wearing their normal
clothes. The total time per participant, including
pre-questionnaires, instructions, experiment and post-
questionnaires, was 30 minutes.
2.2 Experimental Setup
The experiment has been performed in a laboratory
room with a walking free space of 8m × 2m in size.
During the experiment, the room was darkened in or-
der to reduce the participant’s perception of the real
world while immersed in the VE and not to have any
lights that can disturb HTC-Vive infrared-cameras.
The setup has been developed by using Unity 3D:
models and animations are taken from free libraries
publicly available on the web (e.g., Sketchfab, Tur-
bosquid, Mixamo), and then fitted to our needs. We
exactly replicated in VR an existing room and walk-
way used for biomechanical experimental sessions.
In order to allow the subjects to identify real walk-
ing space inside the VE, we added a virtual walkway
(6.4m× 0.85m). At the end of the walkway two inver-
sion zones (zone 1 and zone 2) highlight where sub-
jects have to make a 180deg turn and start walking in
the opposite direction (Figure 1). Green colored zone
represents the start, red colored the end.
The participants wore an HTC-Vive HMD for
the stimulus presentation, which is equipped with a
AMOLED display with resolution of 1080 × 1200
pixels per eye, a refresh rate of 90 Hz and an approx-
Comparing Real Walking in Immersive Virtual Reality and in Physical World using Gait Analysis
123

imate 110
◦
diagonal Field of View (FOV). The sys-
tem is equipped with two base stations that are able to
detect and track the 3D positions of the headset and
of the two Vive controllers, by using infra-red light.
A VR-ready laptop, equipped with an Intel proces-
sor with Core i5 3.5GHz, 8 GB of RAM and Nvidia
GeForce 1060 (6GB VRAM) Graphics Cards, has
been used for rendering, system control and record-
ing.
The base stations were positioned face to face at a
distance of 8 meters and at a height of 2 meters from
the floor (see Figure 1) and connected by the provided
sync cable. It is worth noting that this distance is dif-
ferent from the one recommended by HTC, and that
in (Niehorster et al., 2017) the authors reported some
measurements errors when the setup looses the track-
ing due to a distance between the base stations bigger
than the recommended one. Nevertheless, we decided
to implement this solution in order to be compliant
with the real room and setup (specifically the size of
the walkway) at the Hospital, where we are going to
continue our experimental validation. Moreover, we
previously verified that our setup is not affected by
tracking issues. In particular, the headset and the con-
trollers are always visible to the base stations, which
provide continuous measurements.
We have decided to use the HTC-Vive controllers,
not for tracking the users’ hands and for interacting
with objects in the scene, as they have been devel-
oped for, but for detecting and tracking the position
of the users’ legs. For this reasons, each participant
performed the entire experiment with the HTC-Vive
wireless controllers tied to the lateral compartment of
the left and right legs, directly over the muscle per-
oneus longus. The controllers were used to record
both 3D leg positions during the walk and for ren-
dering leg models replicating the users’ participant
movements in the VE.
2.3 Experimental Protocol
In order to assess cybersickness issues, all the partici-
pants filled out the Simulator Sickness Questionnaire
(SSQ) (S. Kennedy et al., 1993) immediately before
and after the experiment. The questionnaire consists
of 16 questions corresponding to symptoms that are
rated by participants in terms of severity on a Lik-
ert scale from 1 (none) to 4 (severe). These symp-
toms include nausea, burping, sweating, fatigue and
vertigo. Furthermore, the Slater-Usoh-Steed presence
questionnaire (SUS PQ) (Slater et al., 1998; Slater,
1999) was filled out after the experiment.
Each participant was asked to walk at their nor-
mal pace along the virtual (or real) walkway, without
stepping out, and moving between the two zones with
the purpose to reach red zone (the goal) in each trial.
The two zones alternatively switch their color when-
ever the subject reaches the red zone, moving the goal
to the other side of the walkway. Therefore, subjects
turned on themselves and kept walking in the opposite
direction. This was repeated 8 times for each condi-
tion. The experiment included 3 conditions, thus 24
total trials :
1. VR
avatar
: Real walking in the VE along the walk-
way for 8 trials, where the participants see the ren-
dering of the leg models inside of VE. We mea-
sured the leg length of each participant to rescale
proportionately his/her virtual model, visible dur-
ing this configuration.
2. VR: Real walking in the VE along the walkway
for 8 trials, where we disable the leg models ren-
dering, thus no visual feedback of the user’s body
is present.
3. Real: Real walk without HMD for 8 trials, on a
real-world path identical to the one inside the VE.
The “Real” condition has been always presented as
the last in the experiment, while “VR
avatar
” and “VR”
conditions have been permuted.
We recorded the 3D positions of the HMD and of
the two controllers fixed on the users’ legs.
2.4 Gait Quantities Estimation
From the raw 3D positions of the HMD (i.e. of the
users’ head) and of the two controllers (thus indicat-
ing the position of the users’ leg) we have computed
the following quantities:
• Walked Distance: the distance between the sub-
ject’s position of two successive inversion points
(see Fig. 2, black lines)
• Stride length: it is the distance between successive
points of heel contact of the same foot. Since the
HTC-Vive controllers were attached on the mid-
dle portion of the legs we measured the instant of
heel strike looking at the horizontal controller dis-
placement (HCD) along the z axis. We computed
HCD from the difference zleg
le f t
− zleg
right
. Heel
strikes for the left foot occur at roughly the same
instant as the HCD reaches a maximum (or a mini-
mum for the right foot) (see Fig. 2, red lines, black
dots). We computed the stride length as the dif-
ference between the controller positions at the in-
stants of two successive peaks of the HCD curve.
• Step length: it is the traveled distance from one
HTC-Vive controller (swing leg) with respect to
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
124

0 10 20 30 40 50 60 70
80
Time [s]
-4
-2
0
2
4
0
1
2
3
Velocity [m/s]
Movement [m]
Left leg
Right leg
Real
VR
VR
avatar
-4
-2
0
2
4
0
1
2
3
Velocity [m/s]
Movement [m]
Time [s]
0 10 20 30 40 50 60 70 80
Z
HCD
0 10 20 30 40 50 60 70
80
Time [s]
Figure 2: Example of data from one participant. Each column show data for one of the three conditions. First and second
rows show data for the left leg. The third and fourth show data for the right leg. In each subpanel black lines represent the
time course of the z-position, red lines the horizontal controller displacement (HCD) and blu lines represent the modulus of
the velocity profile. Black dots mark the maximum and minimum of the HCD curve used to identify the heel contact time
points. Red dots mark the peak swing velocity.
the other (stance leg) between the heel strike oc-
currences of each foot. In healthy subjects this
parameter result about half stride length. We com-
puted the step length as the difference between the
swing controller position at its heel strike (maxi-
mum of the HCD curve) and the distance between
the controller position at its heel strike (previous
minimum of the HCD curve).
• Step count: it is defined by the number of steps
taken to cover the entire path, for each trial.
• Cadence: it is the number of steps per unit time
measured in steps/minute. We divided the step
count by the time interval between the first and
the last step in each trial and normalized with re-
spect to one minute.
• Peak Velocity: it is the maximum value of the ve-
locity. It is measured in meters per second. We
computed peak velocity by looking at the peaks
of the derivative of the controller positions (see
Fig. 2, blue lines, red dots)
• Velocity profile: it is a window of 1.2s centered on
the peak velocity.
To perform all the statistical analysis for the afore-
mentioned parameters, we computed the average val-
ues across trial (for the walked distance) and across
step (for the other parameters) for each subject and
for each condition (Real, VR, VR
avatar
).
3 RESULTS
3.1 Biomechanics of Walking
As we have discussed in Section 2, here we an-
alyze the biomechanics of walking through spatio-
temporal parameters to evaluate motor performances
in three different conditions compared to each other:
real walking (Real), virtual walking (VR) and vir-
tual walking with users body representation in VE
(VR
avatar
). Statistical analysis was performed with
Wilcoxon rank sum test at the 5% significance level.
Figure 3 summarizes the mean values and stan-
dard deviations of the considered biomechanical
quantities, averaged across participants for the three
conditions.
We first analyze all the trajectories (all the tri-
als, for each subject) in each considered condition
(Real, VR and VR
avatar
), thus computing the total
distance traveled in each trial. Each participant was
asked to walk to reach the inversion zones for both
the real condition and two virtual conditions. Our re-
sults show that participants travel in the correct way
the distances presented to them in all conditions, as
shows in Figure 3, and statistical analysis produces no
significant differences among real and virtual condi-
tions (p= 0.0718 and p=0.2473 respectively for Real
vs. VR and Real vs. VR
avatar
). Therefore, we can
have a first indication that there is no difference be-
tween real and virtual behaviors, in opposition to pre-
vious perceptual studies that reported understimation
Comparing Real Walking in Immersive Virtual Reality and in Physical World using Gait Analysis
125

0
1
2
3
4
5
6
7
8
Real
VR
VR
avatar
Walked Distance [m]
4
6
8
10
12
14
Step Count
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Step length [m]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Stride length [m]
0
0.5
1
1.5
2
2.5
3
3.5
Peak swing velocity [m/s]
L R L R L R
75
85
95
105
115
125
135
Cadence [step/min]
0
*
*
*
*
*
*
0
Figure 3: Mean and standard deviation in each condition of walking for spatio-temporal parameters. On step count, cadence
and peak velocity significant differences between Real and two virtual conditions are highlighted.
and depth compression in a VE (Valkov et al., 2016;
Janeh et al., 2017b). It is worth noting that the contri-
bution of having a virtual representation of the users’
legs does not emerge, probably due to the fact that
no depth compression occurs also in the standard VR
setup without avatar.
To obtain a finer analysis at the level of the single
stride/step we first analyzed the stride length. From
the analysis no significant effect of immersive walk-
ing in VE emerged (p=0.788 and p=0.6464 respec-
tively for Real vs. VR and for Real vs. VR
avatar
).
The same result arises from the estimation of the
step length. It is worth to note that these values
are consistent with the stride length, which is about
double in healthy subjects. As for stride length, the
Wilcoxon rank sum test produces no significant dif-
ferences (p=0.987, p=0.861 for Real vs. VR and Real
vs. VR
avatar
).
On the contrary, the step count shows significant
differences between real and virtual conditions. The
obtained values show that in a VE people tend to
make a slightly greater number of steps. Mean step
count value for Real condition (9.45± 0.68 step) is
significantly smaller than mean step count values for
the two virtual conditions (VR: 10.48± 1.24, p=0.01;
VR
avatar
: 10.5± 1.01, p=0.002).
Cadence is defined as the number of steps per
unit time (steps/minute). The obtained values for
cadence are linked to the previously computed step
count value, indeed we still have significant differ-
ences between real and virtual conditions (p= 0.0018
for Real vs. VR and p=0.0023 for Real vs. VR
avatar
).
We also analyzed velocity, to assess and to com-
pare the peak velocity during the swing phase for each
foot. Mean peak values show a difference (p < 0.05
for Real vs. VR and Real vs. VR
avatar
, computed
for left and right leg) between real and virtual condi-
tions, with greater velocity during real walk (2.72±
0.35 m/s for left leg and 2.7±0.33 for the right leg)
compared to walking in VE (VR: 2.42 ± 0.36 m/s
and 2.39 ± 0.36 m/s respectively for left and right
leg, VR
avatar
: 2.41±0.34 and 2.38±0.29 respectively
for left and right leg). This result is in agreement with
results in the literature that reported an evident reduc-
tion of velocity in VE with respect to a real world
situation (Nabiyouni et al., 2015).
It is worth noting that in our setup the Real con-
dition was always presented at the end of the exper-
iment. This can have an influence in the presented
results, we should further analyze.
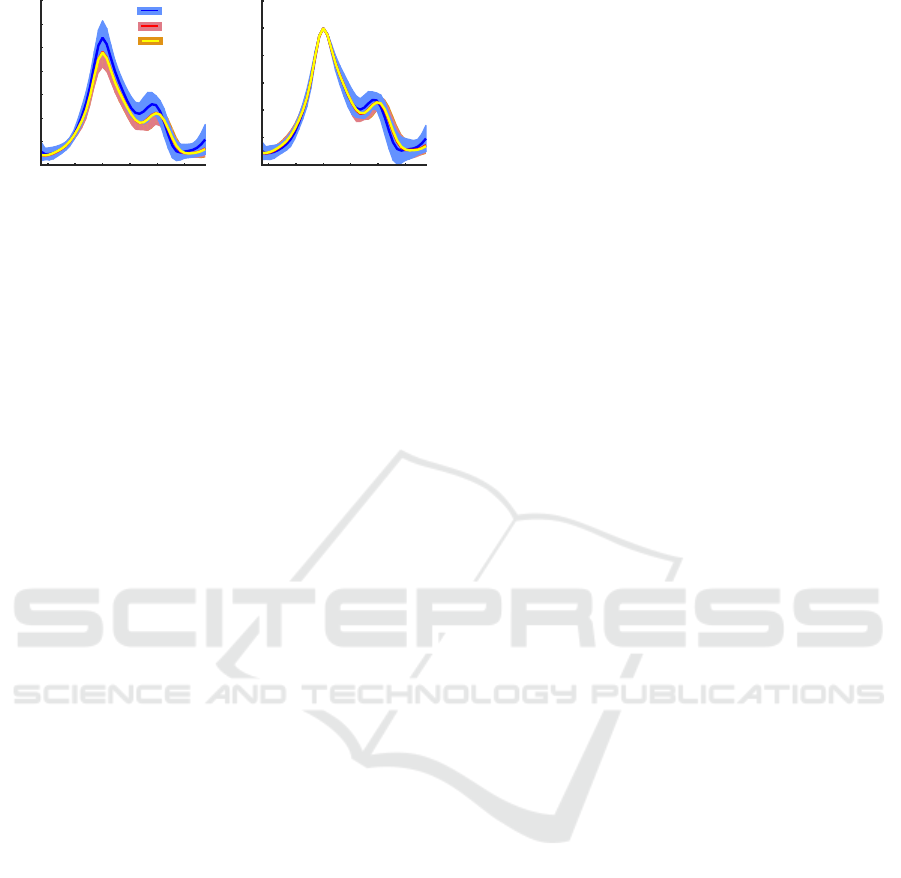
Despite this significant difference in peak velocity,
it is evident (as shown in Figure 2) that there is a ve-
locity pattern that is repeated in similar way in all the
three conditions. Since the values between left and
right leg are very similar, we used the average values
for the following analysis. Therefore, the analysis of
the average velocity profile (across trial and subjects)
for each condition, allowed us to assess whether there
is an actual correspondence and overlapping between
real and virtual conditions. This is qualitatively il-
lustrated in Figure 4(left), in which the average pro-
files for all conditions are shown with their associated
standard deviations. The similarity among the con-
ditions is even more evident if we look at the nor-
malized profiles with respect to maximum value for
each condition. Indeed, Figure 4 shows how such pro-
files are extremely repeatable. The statistical analysis
of the average quadratic error between the mean pro-
files in the three conditions, all normalized as men-
tioned above, does not appear to be a significant dif-
ference (p= 0.231 e p=0.112 Real vs. VR and Real
vs. VR
avatar
). Such a result could be the confirma-
tion that we have achieved a natural walk behaviour
in virtual environments.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
126
-400 -200 0 200 400 600
0
0.5
1
1.5
2
2.5
3
3.5
-400 -200 0 200 400 600
0
0.2
0.4
0.6
0.8
1
1.2
Time [ms] Time [ms]
Velocity [m/s]
Velocity [a.u.]
Real
VR
VR
avatar
Figure 4: (left) Mean velocity profile and (right) normalized
mean profile for Real, VR and VR
avatar
conditions.
We can also say that having a virtual representa-
tion of the users legs has not led to any change in any
of the parameters compared. Nevertheless, it is worth
noting that this result could be affected by the reduced
field of view of HMD. This fact will be the focus of
future analysis.
3.2 Self-reported Assessment through
Questionnaires
The SSQ score averaged across all the participants
is 10.39 ± 10.65 before the experiment, and 12.46
±13.87 after the experiment. The scores indicate
overall low simulator sickness symptoms for walk-
ing with an HMD (p = 0.61). Moreover, the analysis
of the sub-scores of the SSQ indicate that no specific
domains of simulation-related sickness were changed
by VR exposure: we measured a mean N (Nausea)
score of 8.48±11.74, a mean O (Oculomotor) score
of 11.79±11.4 and a mean D (Disorientation) score
of 12.37± 20.2. The mean SUS PQ score for the
sense of feeling present in the VE was M = 2.8 ±1.98,
which indicates a moderate sense of presence.
4 CONCLUSION
In this paper, we have addressed an important prob-
lem related to interaction in immersive virtual real-
ity: natural walking inside virtual environments. Re-
searchers have addressed such a problem by devel-
oping systems and techniques that allow people to ex-
plore VE, though having a limited physical interaction
spaces (i.e. by using treadmills, stepping systems,
or walk-in-place techniques). Recently, new tech-
nologies allow people to precisely track the 3D po-
sition of the users and to translate such measures into
position and orientation of the virtual cameras, thus
replicating human movements inside the VR. This
is typically achieved by using optical tracking sys-
tems (Janeh et al., 2017b). Here, we have presented a
low-cost system that uses the HTC-Vive tracking sys-
tem, only. Our aim was to evaluate human locomo-
tion, from a biomechanical point of view, in order to
assess whether such a system can be effectively used
in clinical VR tasks involving walking. For this rea-
son, we have created a virtual environment that repli-
cates a specific setup used at Hospital, where people
can walk and we have compared some gait quantities
derived from the users’ tracking, in order to under-
stand whether differences occur between walking in
the real world and in VR. We have also taken into
account the presence of an avatar inside VR replicat-
ing the movements of the users’ legs, to understand
whether this affects locomotion.
Referring to the main paper’s aims described in
Section 1 we can devise the following conclusions
and future works:
• The analysis of the considered gait parameters
shows that there are no significant differences in
the total distance the users walk, in the stride and
step length. On the contrary, we noticed signif-
icant differences in the peak swing velocity, the
step count and the cadence. This can be explained
by the fact that subjects wore a cabled HMD for
the virtual conditions, and this could be a possi-
ble factor that introduces differences in the walk-
ing behavior with respect to a real world situation.
Moreover, most of the subjects have never ex-
perienced walking in immersive VR before, thus
we should further analyze whether these differ-
ences disappear after a longer training session.
The velocity profiles of each walking averaged
across participants do not show significant differ-
ences among the three conditions, thus showing
that people walk in a similar way in the three sce-
narios.
• The obtained results can be affected by the fact
that we have used a low-cost setup to track users’
movements. From the literature (Niehorster et al.,
2017), we know that the considered setup is char-
acterized by a good accuracy but in some situa-
tions it can be affected by errors. In particular,
shifts in the reference measurement system can
occur when working far from the theoretical limit
of use of the HTC-Vive, as in our case. A future
work will be a comparison with a optical tracking
system, in order to verify whether the same re-
sults are obtained also by using a different track-
ing system, and to further assess the reliability of
our low-cost system.
• All the results show that no differences occur be-
tween the situation in which the user can see an
avatar of his/her legs, and the one in which no
visual feedback about his/her own body is pre-
Comparing Real Walking in Immersive Virtual Reality and in Physical World using Gait Analysis
127

sented. This is partially in contrast with the re-
sults obtained by (Valkov et al., 2016), we plan
to further analyze the contribution of having a vi-
sual feedback of the users’ own body inside VR,
by considering more complex tasks involving lo-
comotion, e.g. walking on different surfaces and
in presence of obstacles.
REFERENCES
Chessa, M., Caroggio, L., Huang, H., and Solari, F. (2016a).
Insert your own body in the oculus rift to improve pro-
prioception. In VISIGRAPP (4: VISAPP), pages 755–
762.
Chessa, M., Maiello, G., Borsari, A., and Bex, P. J. (2016b).
The perceptual quality of the oculus rift for immersive
virtual reality. Human–Computer Interaction, pages
1–32.
Hollman, J. H., Brey, R. H., Bang, T. J., and Kaufman, K. R.
(2007). Does walking in a virtual environment induce
unstable gait?: An examination of vertical ground re-
action forces. Gait & Posture, 26(2):289–294.
Janeh, O., Bruder, G., Steinicke, F., Gulberti, A., and
Poetter-Nerger, M. (2017a). Analyses of gait parame-
ters of younger & older adults during (non-) isometric
virtual walking. IEEE Transactions on Visualization
and Computer Graphics.
Janeh, O., Langbehn, E., Steinicke, F., Bruder, G., Gulberti,
A., and Poetter-Nerger, M. (2017b). Walking in virtual
reality: Effects of manipulated visual self-motion on
walking biomechanics. ACM Transactions on Applied
Perception (TAP), 14(2):12.
Kim, A., Darakjian, N., and Finley, J. M. (2017). Walk-
ing in fully immersive virtual environments: an eval-
uation of potential adverse effects in older adults and
individuals with parkinsons disease. Journal of neu-
roengineering and rehabilitation, 14(1):16.
McMahan, R. P., Bowman, D. A., Zielinski, D. J., and
Brady, R. B. (2012). Evaluating display fidelity and
interaction fidelity in a virtual reality game. IEEE
transactions on visualization and computer graphics,
18(4):626–633.
Mohler, B. J., Campos, J. L., Weyel, M., and B
¨
ulthoff,
H. H. (2007). Gait parameters while walking in
a head-mounted display virtual environment and the
real world. In Proceedings of Eurographics, pages
85–88.
Nabiyouni, M. and Bowman, D. A. (2016). A taxonomy
for designing walking-based locomotion techniques
for virtual reality. In Proceedings of the 2016 ACM
Companion on Interactive Surfaces and Spaces, pages
115–121. ACM.
Nabiyouni, M., Saktheeswaran, A., Bowman, D. A., and
Karanth, A. (2015). Comparing the performance
of natural, semi-natural, and non-natural locomotion
techniques in virtual reality. In 3D User Interfaces
(3DUI), 2015 IEEE Symposium on, pages 3–10. IEEE.
Niehorster, D. C., Li, L., and Lappe, M. (2017). The accu-
racy and precision of position and orientation tracking
in the htc vive virtual reality system for scientific re-
search. i-Perception, 8(3):2041669517708205.
S. Kennedy, R., E. Lane, N., Berbaum, K., and G. Lilien-
thal, M. (1993). Simulator sickness questionnaire:
An enhanced method for quantifying simulator sick-
ness. The International Journal of Aviation Psychol-
ogy, 3:203–220.
Slater, M. (1999). Measuring presence: A response to the
witmer and singer presence questionnaire. Presence:
Teleoper. Virtual Environ., 8(5):560–565.
Slater, M., McCarthy, J., and Maringelli, F. (1998). The
influence of body movement on subjective presence
in virtual environments. Human Factors, 40(3):469–
477. PMID: 9849105.
Slater, M., Usoh, M., and Steed, A. (1994). Depth of pres-
ence in virtual environments. Presence: Teleoper. Vir-
tual Environ., 3(2):130–144.
Steinicke, F., Bruder, G., Jerald, J., Frenz, H., and Lappe,
M. (2010). Estimation of detection thresholds for redi-
rected walking techniques. IEEE transactions on vi-
sualization and computer graphics, 16(1):17–27.
Valkov, D., Martens, J., and Hinrichs, K. (2016). Evaluation
of the effect of a virtual avatar’s representation on dis-
tance perception in immersive virtual environments.
In Virtual Reality (VR), 2016 IEEE, pages 305–306.
IEEE.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
128
