
Depth from Small Motion using Rank-1 Initialization
Peter O. Fasogbon
Nokia Technologies, 33100 Tampere, Finland
Keywords:
3D Reconstruction, Depth-map, Factorization, DfSM, Bundle Adjustment, Feature Extraction, Rank-1.
Abstract:
Depth from Small Motion (DfSM) (Ha et al., 2016) is particularly interesting for commercial handheld devices
because it allows the possibility to get depth information with minimal user effort and cooperation. Due
to speed and memory issue on these devices, the self calibration optimization of the method using Bundle
Adjustment (BA) need as little as 10-15 images. Therefore, the optimization tends to take many iterations to
converge or may not converge at all in some cases. This work propose a robust initialization for the bundle
adjustment using the rank-1 factorization method (Tomasi and Kanade, 1992), (Aguiar and Moura, 1999a).
We create a constraint matrix that is rank-1 in a noiseless situation, then use SVD to compute the inverse
depth values and the camera motion. We only need about quarter fraction of the bundle adjustment iteration
to converge. We also propose grided feature extraction technique so that only important and small features are
tracked all over the image frames. This also ensure speedup in the full execution time on the mobile device.
For the experiments, we have documented the execution time with the proposed Rank-1 initialization on two
mobile device platforms using optimized accelerations with CPU-GPU co-processing. The combination of
Rank 1-BA generates more robust depth-map and is significantly faster than using BA alone.
1 INTRODUCTION
The use of smartphones is growing continuously no-
wadays and the level of expectation around what these
cameras can do is increasing year by year. Mobile
consumers are starting to expect more technological
capabilities from visual applications on their mobile
devices. These applications include but not limited
to camera refocusing, 3D parallax, augmented reality
and extended depth of field (Barron et al., 2015). To
meet these needs, estimating three dimensional infor-
mation is becoming an increasingly important techni-
que, and numerous research efforts have focused on
computing accurate three dimensional information at
a low cost, without the need for additional devices or
camera modifications. One research direction that has
recently led to renewed interest is the depth estimation
from image sequences acquired from narrow/small
baseline in the range of about 8mm. This is popu-
larly known as Depth from Small Motion (DfSM),
and many research contributions have been made over
the years (Yu and Gallup, 2014), (Joshi and Zitnick,
2014), (Ha et al., 2016), (Corcoran and Javidnia,
2017), (Ham et al., 2017). For hand-held cameras,
small amount of motion is always present, which can
occur accidentally as a result of hand-shaking motion,
tremble, source vibration etc. Depth-map generation
using these small motions can be offered to consu-
mers to accompany their selfies, bothie and portraits
camera shots.
1.1 Background
These DfSM methods all have their base on the po-
pular Structure from Motion (SfM) (Sch
¨
anberger and
Frahm, 2016) and Multi-View Stereo (MVS) (Seitz
et al., 2006) techniques. The SfM techniques assume
that a good two-view reconstruction can be obtained
with algebraic methods, which in turn depend on ade-
quate baseline between overlapping views. The base-
line between sequences of frames captured as a sud-
den motion in DfSM is considered so small which re-
stricts the viewing angle of a three-dimensional point
to less than 0.2
◦
(Yu and Gallup, 2014). Due to this
limitation, the popular SfM method fails (Koenderink
and van Doorn, 1991), (Sch
¨
anberger and Frahm,
2016) and the computed depth-map will be highly pe-
nalized. Bundle adjustment (BA) (Hartley and Zisser-
man, 2003), (Triggs et al., 2000) is an indispensable
procedure in the SFM, and use a basic cost function
to evaluate the reprojection error from Undistorted to
Distorted image domain with non-linear least square.
This is used to iteratively refine the camera parame-
ters and three-dimensional points required to gene-
Fasogbon, P.
Depth from Small Motion using Rank-1 Initialization.
DOI: 10.5220/0007381405210528
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 521-528
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
521
rate the depth-map. The bundle adjustment used for
SfM methods are not suitable for small motions, the-
refore a modified bundle adjustment is proposed in
(Ha et al., 2016) under inverse depth representation.
In this case, the reprojection error is estimated from
mapping the points in the Distorted to Undistorted
domain. The sparse three-dimensional points are cre-
ated by random depth initialization (Yu and Gallup,
2014), then plane sweeping based image matching
(Collins, 1996) is employed to create the depth-map.
Finally, Markov Random Field (Komodakis and Pa-
ragios, 2009) approach is employed to regularize the
estimated depth-map effectively.
1.2 Problem Statement
Although DfSM algorithm is specially designed for
small baselines, the estimated camera poses become
unreliable if the motion is unreasonably small. It is
assumed that the required minimum baseline to apply
this approach is reasonable when large number of fra-
mes are acquired, approximately 30 frames (Ha et al.,
2016). As a result of limited memory space on mobile
devices and the execution time issue, we are restricted
to only use 10-15 frames in the depth-map generation
on the mobile devices. The consequence of using this
small number of frame means that the self calibrating
bundle adjustment may not converge fast enough or
not converge at all. In addition, as a result of lack of
features near the image border, the estimated radial
distortion parameters diverge beyond their bound and
may not give meaningful estimation.
Due to these problem, the BA do not always give
correct estimates of the camera parameters and in-
verse depth values. One solution to tackle this issue
might be to use very high number of feature points in
the order of 10,000 and above, or include an additi-
onal photometric bundle adjustment (Alismail et al.,
2017) step if one is restricted to small number of fe-
ature points. In addition, one can bound the camera
parameters during the optimization. However, these
solutions only introduce additional complexity to the
system optimization. Therefore, a good initialization
for the bundle adjustment is vital for the depth-map
accuracy, so we proposed to use factorization techni-
que based on Rank-1 suitable for inverse depth repre-
sentation.
1.3 Summary
In this paper, we describe an uncalibrated Depth
from Small Motion technique using rank-1 initializa-
tion. This approach provides a better initialization
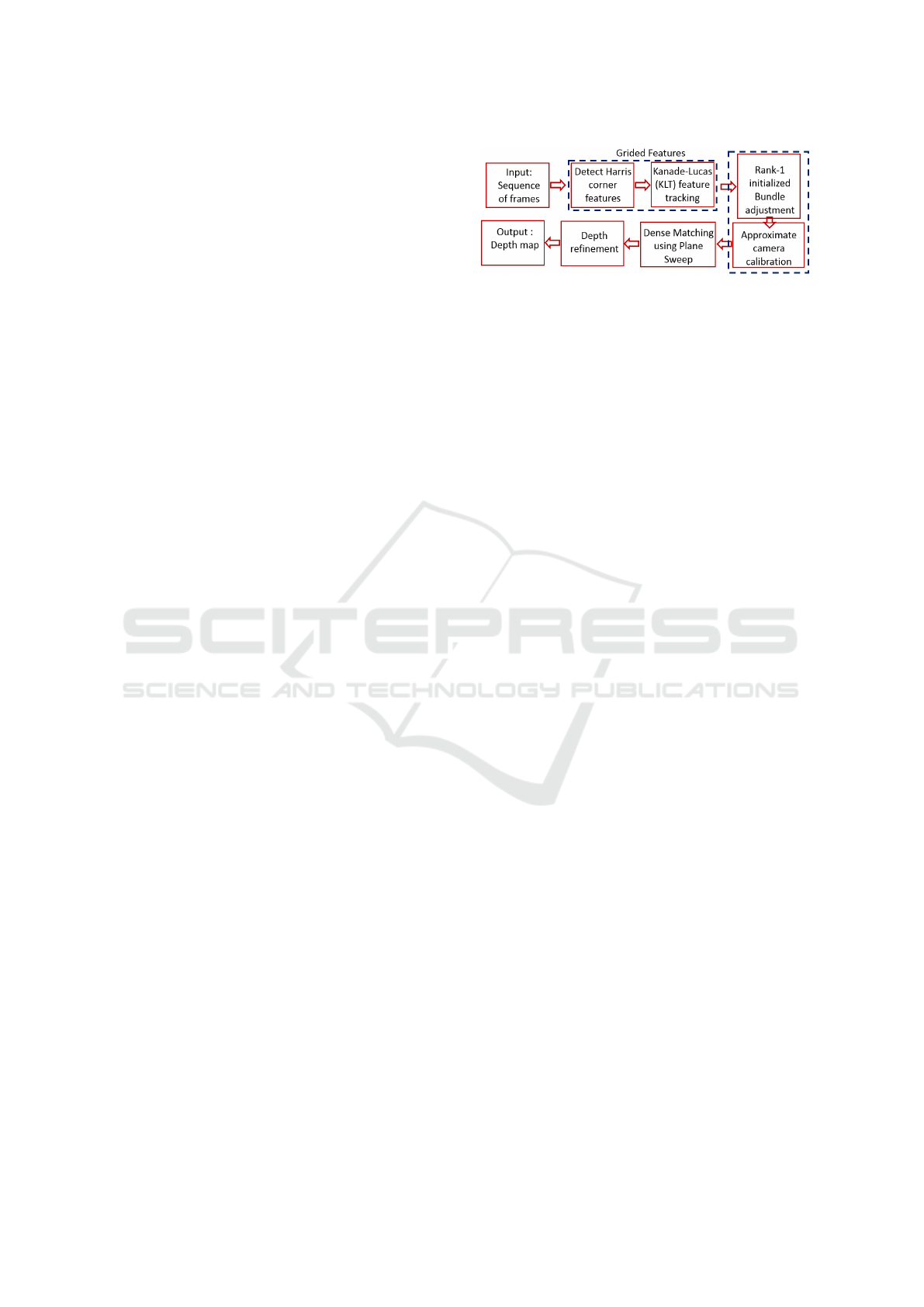
Figure 1: DfSM framework. Our main technical contributi-
ons are in the dashed enclosed boxes.
for the bundle adjustment procedure that takes too
much or doesn’t converge under DfSM. This is par-
ticularly suitable and targeted to speedup processes
for the deployment of the DfSM algorithm on con-
sumer smartphone devices. The Rank-1 factorization
does not only speed up the convergence process but
also allow good initialization for accurate depth-map
generation. Thanks to rank-1 initialization, self cali-
brating Bundle Adjustment (BA) is able to converge
in as little as 10-20 iterations with 10 images. We
also proposed a grided feature extraction to speedup
feature tracking process of the algorithm. Finally,
we optimized various parts of the original algorithm
(Ha et al., 2016) using GPU OpenCL and other CPU
multi-threading techniques. This makes it possible to
produce a detail experiment on a mobile device under
ANDROID platform.
In the next section, we present the uncalibrated
rank-1 factorization for the DfSM problem. Expe-
riments and performance evaluation with the propo-
sed method as compared to optimized CPU only im-
plementations are provided in section 3. Finally, we
made conclusion and future direction in this work.
2 DfSM WITH RANK-1
INITIALIZATION
Fig. 1 illustrates the general overview of the DfSM
algorithm for the depth-map generation in this work.
Some consistent good features over all the video fra-
mes were extracted using grided feature tracking ap-
proach proposed in this work. Then, we initialize the
bundle adjustment procedure using the rank-1 facto-
rization technique, the outcome are the optimized ca-
mera parameters and the inverse depth point values.
Finally, the estimated inverse depth point values and
the camera parameters are used under a dense mat-
ching method to create the depth-map. In the follo-
wing part of the section, we start first with coordinate
representation used in this paper, then we explain the
proposed grided-feature extraction, and Rank-1 initi-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
522
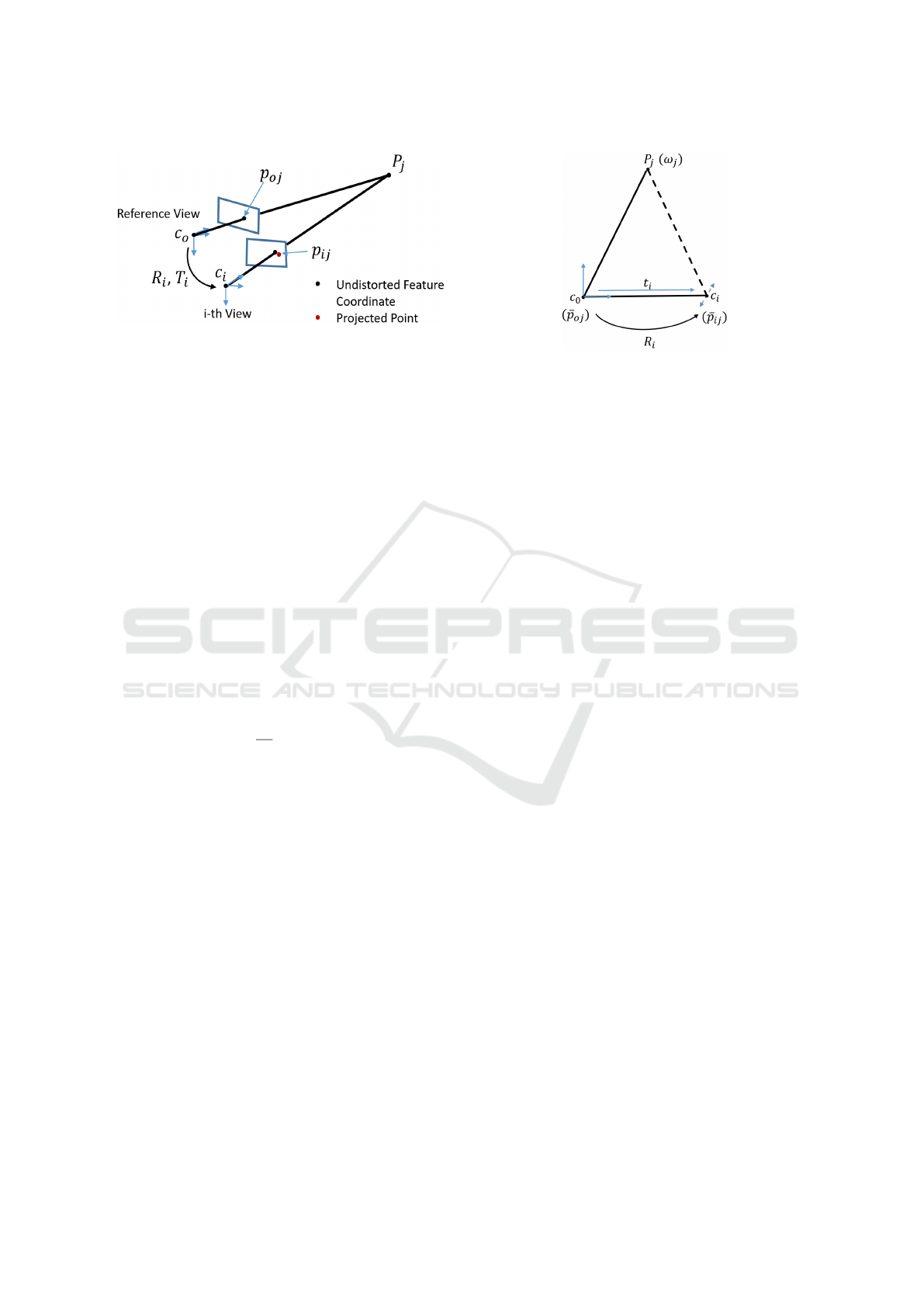
Figure 2: Small motion geometry used in DfSM for uncali-
brated camera using undistorted coordinates (i.e assume no
lens distortion).
alization methods. In the final part of the section, we
summarize the DfSM algorithm.
Coordinate Representation. Fig. 2 illustrates the
reference view coordinate origin C
0
with undistorted
pixel p
0 j
(u, v). The back-projection of p
0 j
(u, v) onto
both the 3D coordinate and i-th view with coordinate
origin C
i
is denoted as P
j
and p
i j
. Both i and j sig-
nifies j = 1 . . . m points and i = 1 . . . n views. The i-th
camera is related to the reference plane by rotation
matrix R
i
followed by translation T
i
. The backpro-
jected 3D point can be parametrized using the inverse
depth ω
j
as shown in equation (1), where (x
j
, y
j
) is
the normalized coordinate of p
0 j
(u, v) derived from
using the inverse of the intrinsic camera matrix K(Ha
et al., 2016) (Hartley and Zisserman, 2003) that em-
beds both the focal length and principal point.
P
j
=
1
ω
j
[x
j
, y
j
, 1]
T
(1)
Note that the earlier expressions and explanations
assume no lens distortion whatsoever. Indeed, lenses
are affected by distortion and the most common one
is the radial distortion (Hartley and Zisserman, 2003).
To remove these radial distortion, we need to deduce
a mapping functions F proposed in (Ha et al., 2016)
with radial coefficients k
1
, k
2
. This function F helps
to map the distorted points ˜p
0 j
, ˜p
i j
to undistorted ones
p
0 j
, p
i j
respectively using iterative inverse mapping.
For the simplicity of the rest of this section, we as-
sume the radial lens distortions have been removed.
2.1 Grided Feature Tracking
The feature extraction step is an interest for us here as
a means to speed up the execution time of the whole
algorithm. Our main goal is to reduce as much as pos-
sible the total number of feature points that is tracked
all along the frame sequences. We proposed what is
called a grided feature extraction approach. The full
Figure 3: The setup constraint for the rank-1 problem repre-
sented in normalized image coordinate ¯p from the reference
plane.
resolution image is first divided into grids of fixed si-
zes. Then, we proceed by extracting only strongest
harris corners (Harris and Stephens, 1988) in the en-
closed grids. We use Shi-Tomasi score as the mea-
sure of best feature in an enclosed grid (Shi and To-
masi, 1994). The correspondence feature locations to
the other frames are found by Kanade-Lukas-Tomashi
(KLT) method (Lucas and Kanade, 1981).
2.2 Initialization using Rank-1
Without abuse of notation, we denote the normalized
coordinate of both p
0 j
and p
i j
in the reference coor-
dinate as ¯p
0 j
(x, y) and ¯p
i j
(x, y) respectively. Fig. 3
illustrates the coordinate origin that have been cente-
red on the reference plane. In a perfect case depicted
by the figure, we can see that c
0
belonging to the re-
ference plane is fixed at origin, and the optical axis
formed by c
i
is parallel to that of c
0
.
We can determine the relative camera rotation R
i
between keyframe c
0
and frame c
i
by (Kneip et al.,
2012). Given these rotations and set of corresponding
features ¯p
0 j
↔ ¯p
i j
, we can estimate an optimal trans-
lation t
i
between c
0
and c
i
using factorization method.
We create a form of flow representation between
the origin c
0
and c
i
using the inverse depth point re-
presentation P
j
as a constraint for the factorization
problem. We formulate the transformation of point
¯p
i j
located on i-th plane onto the reference coordinate
as p
i j
which is computed as follows:
p
i j
= −R
i
¯p
i j
(2)
In fig. 3, we have only shown that the position of c
i
is only approximated (c
i
≈ −R
i
t
i
). This means that c
i
and ω
j
are the most penalized. Therefore, with facto-
rization method one should be able to determine the
Depth from Small Motion using Rank-1 Initialization
523

optimal value for these parameters even under noise
perturbations.
By analysing the inverse depth representation in
equation (1), one can see that (x
j
, y
j
) are known from
the position of the features in the reference frame, so
we only need to solve for the inverse depth value ω
j
.
The problem to solve is represented in equation (3),
where the Left-Hand-Side matrix M(3n × m) is made
up of flow representation p
i j
to create a significantly
over-constrained system of equations. The factori-
zation of M should give the Right-Hand-Side which
consist of the translation matrix C(3n ×1) and inverse
depth matrix D(1 × m).
M = C D
T
p
11
. . . p
1m
.
.
.
p
n1
. . . p
nm
=
c
1
.
.
.
c
n
d
1
. . . d
m
(3)
The factorization problem in equation (3) has been
reduced to rank-1 problem, thanks to the inverse depth
representation which means only the inverse depth
is determined. This rank-1 factorization is extensi-
vely studied in computer vision community over the
years (Tomasi and Kanade, 1992), (Joshi and Zit-
nick, 2014), (Aguiar and Moura, 1999a), (Aguiar and
Moura, 1999b),(Tang et al., 2017).
The solution is formulated as a form of non-linear
optimization in equation (4) and solved using SVD
(Golub and Van Loan, 1996). From the equation,
kp
i, j
− c
i
ω
j
k
2
is a geometric error to be minimized
between the flow representation p
i, j
and the estima-
ted parameters (c
i
, ω
j
).
M − C D
T
minimize
n
∑
i=1
m
∑
j=1
kp
i j
− c
i
ω
j
k
2
(4)
2.3 Full Algorithm
We summarize the proposed DfSM using rank-1 initi-
alization next in this section. This is a brief summary
that incorporates the approach presented in ths paper
and the DfSM described in (Ha et al., 2016).
Figure 4: Depth-map demo on ”selfie” sequence for AN-
DROID mobile device using CPU-GPU optimized co-
processing.
Algorithm 1: DfSM with Rank-1 (iRank1 ).
Input : p
0 j
, p
i j
, where i = 1 . . . n and j = 1 . . . m
Output : K, k
1
, k
2
, R
i
, c
i
, ω
j
, depth-map D
Pre-processing :
• Estimate ¯p
i j
, ¯p
0 j
using K. The focal length is
set to the larger value between image width and
height. The principal point is set to the center of
the image.
Bundle Adjustment using Rank-1 initialization :
1. Estimate rotation R
i
between ¯p
0 j
↔ ¯p
i j
using
(Kneip et al., 2012),
2. Rotate ¯p
i, j
to p
i j
in the reference plane as eqn. (2),
3. Create M matrix using p
i j
, and factorize as eqn.
(4)
4. Refine the camera parameters and depth estimate
using bundle adjustment (Agarwal et al., 2012),
(Huber, 1992).
Dense Matching :
• Apply the dense matching proposed in (Ha et al.,
2016) to determine the depth-map image D.
3 EXPERIMENTS
To demonstrate the efficiency and practicality of
the proposed implementation, we developed an inte-
ractive OpenCL ANDROID application that is shown
in figure 4. The figure illustrates the reference image
and the corresponding depth-map generated over all
the 10 non-reference images. Experiments were
done with Qualcomm Snapdragon chipset containing
Adreno 540 GPU, with CPU 4GB RAM and 8 cores.
We implemented the proposed algorithm on a smartp-
hone with GPU and CPU optimized co-processing in
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
524
Table 1: Table of total execution time in seconds (s) and convergence result using the Qualcomm snapdragon device on bike
test video samples. NC-100 means no convergence at 100th iteration while C-20 means convergence at 20th iteration.
10 frames 15 frames
CPU-GPU CPU-GPU CPU-GPU CPU-GPU
Device Stages CPU-only iBA iRank1 CPU-only iBA iRank1
Bike1 Read input frame sequence 0.44 0.42 0.45 0.52 0.49 0.50
Feature Extraction 0.885 0.539 0.539 1.375 0.771 0.771
Nb. features 1987 275 275 1941 258 258
Bundle Adjustment 2.05 1.902 0.824 2.303 2.315 0.571
Nb. iteration NC-100 NC-100 C-20 NC-100 C-100 C-15
Dense Matching 28.63 9.43 9.40 30.69 10.14 10.13
Bike2 Read input frame sequence 0.41 0.41 0.42 0.52 0.48 0.50
Feature Extraction 0.812 0.491 0.489 2.011 0.621 0.618
Nb. features 1958 293 293 1923 249 249
Bundle Adjustment 2.13 1.851 0.803 2.40 2.12 0.63
Nb. iteration NC-100 NC-100 C-23 NC-100 C-95 C-10
Dense Matching 28.48 9.14 9.16 30.12 10.29 10.24
order to proper analyze the effectiveness of the pro-
posed method directly on hand-held devices.
3.1 Evaluation on Convergence
We execute the algorithm on two test video clips
”bike1”, and ”bike2”. These test clips are full HD
(1920 × 1080) video using 10 and 15 frames respecti-
vely. The process is initialized using the proposed
grided feature extraction with a fixed grid size of 80
× 80, which provides 275 consistent features that is
tracked all along the non-reference images. Without
the grided feature extraction method, 1987 consistent
features are expected to be tracked. Therefore, the
proposed feature extraction allow approximately 7x
reduction from the original features. The value of the
grid size is optional and can be modified as seem fit
by the user.
Table 1 provides a summarized execution time of
the algorithms, and also justify the fast convergence
of the proposed method. The CPU-only signifies the
case when the DfSM algorithm is directly transfered
to the mobile platform with some optimizations made
but no grided feature extraction is done here. Howe-
ver, CPU-GPU is an ugraded version to the CPU-
only, with GPU OpenCL acceleration on the dense
matching using 128 depth-plane sweep, and the pro-
posed grided feature extraction. In addition, iRank1
represents the DfSM using rank-1 initialization pro-
posed in this work while iBA represent the one wit-
hout rank-1 initialization.
This table exhibits two important informations;
(1) the time complexity on mobile device measured in
seconds and (2) the convergence information. For the
convergence part, we implore the user to focus on the
Bundle Adjustment row. The iRank1 method con-
verges in approximately 25 iteration for the two bike
examples using 10 images while iBA only partially
converge at 50th iteration when more images were
added to the acquisition. Not only is the rank-1 ini-
tialization vital, it is also fast and converge in about
3 iteration which is approximately 0.009s. In sum-
mary, this approach do not add any time complexity
to the full algorithm and allow fast convergence of the
bundle adjustment in as little as 10 iterations.
We made further test for subjective quality analy-
sis of the proposed method on the earlier bike test se-
quence. Fig. 5 illustrates the test with 10 frames while
fig. 6 illustrates the one with 15 frames. By analyzing
the result in figure 5, one can see that iRank1 method
is already starting to converge at 10th iteration and fi-
nally converges at 50th iteration with pleasing depth-
map result. However, for this same example, the iBA
only start to converge at the 50th iteration. For the
example in fig. 6 using 15 frames, we can see that
the depth-map provided by iRank1 at 10th iteration
seems to have converged while iBA only shows con-
vergence at 50th iteration. With these experiments,
we have shown the importance of rank-1 initialization
under the DfSM algorithm.
3.2 Evaluation on Self-calibration
As the bundle adjustment proposed in DfSM (Ha
et al., 2016) is designed to self-calibrate the intrinsic
camera parameters, we effect quantitative evaluation
for the camera parameters obtained by the iRank1
proposed in this work. For this experiment, we use
two smartphones that contains Qualcomm snapdra-
gon and Hisilicon Kirin chipsets. These two devi-
ces both have two different lens settings. The initial
focal length is set to the largest value between the
image width and height. We compare the estimated
focal length and radial distortion against the ground
Depth from Small Motion using Rank-1 Initialization
525
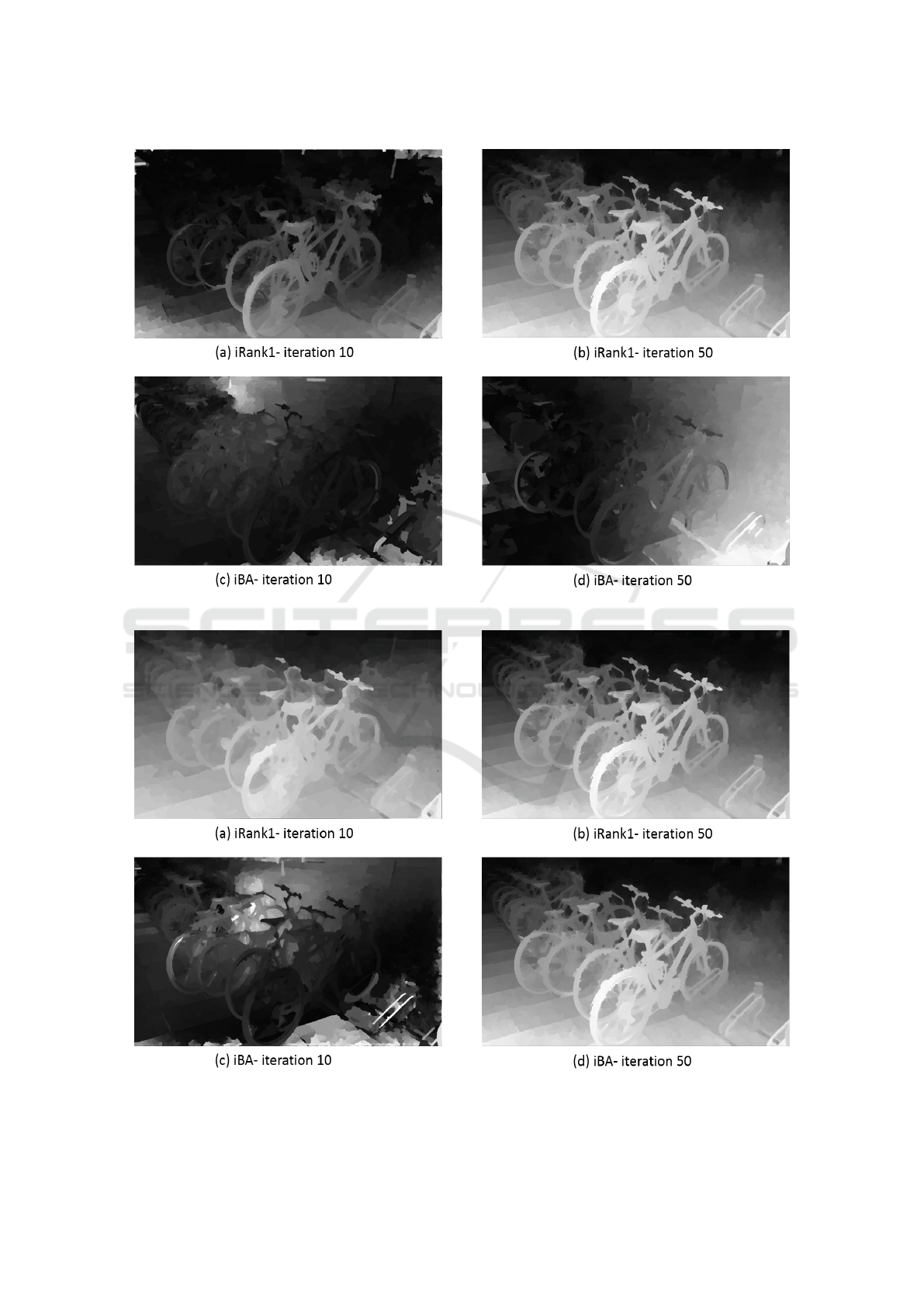
Figure 5: Subjective quality analysis of the depth-map generation between proposed iRank1 and iBA, using 10 frames.
Figure 6: Subjective quality analysis of the depth-map generation between proposed iRank1 and iBA, using 15 frames.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
526

Table 2: Evaluation in pixels unit for the estimated intrinsic camera parameters and radial distortion ones. We have tested 30
video clips in total acquired by two cameras with different lens settings.
Qualcomm Camera Hisilicon Camera
Clip 1(5 videos) Clip 2(10 videos) Clip 3(5 videos) Clip 4(10 videos)
focal length
ground-truth 1360.21 1358.32 1503.71 1505.61
Initial 1280.00 1280.00 1280.00 1280.00
Min 1329.89 1341.84 1478.31 1479.01
Mean 1330.62 1335.16 1519.32 1503.78
Max 1392.06 1371.69 1563.35 1531.32
Distortion
Initial 4.25 4.08 5.72 5.63
Min 0.51 0.39 0.08 0.09
Mean 1.53 1.18 0.63 0.69
Max 2.09 1.34 1.09 1.15
truth. For measuring the distortion error, we generate
a pixel grid and transform their coordinates using the
estimated Distorted-Undistorted image domain radial
distortion function F explained in the original pa-
per (Ha et al., 2016). The transformed coordinates
are again applied with the ground-truth Undistorted-
Distorted image domain model found in the camera
pre-calibration. If the estimated F is reliable, these
sequential transformation should be identity. The dis-
tortion error is measured in pixels using the mean of
absolute distances. The result shows that the estima-
ted parameters are close to the ground truth.
Table 2 shows the experimental result. We captu-
red 15 videos each using camera located on the Qual-
comm and Hisilicon devices. These cameras both
have different lens settings, and the ground-truth ca-
mera parameters are acquired using the camera ca-
libration toolbox (Zhang, 2000). For the qualcomm
test, clip Clip 1(5 videos) and Clip 2(10 videos) make
use of 5 and 10 videos, and each video containing 10
frames. These same procedure is repeated for Hisili-
con device to create the test clips Clip 3(5 videos) and
Clip 4(10 videos) respectively. In total, 30 video clips
are used in this experiment. For the camera parame-
ter, the focal length that is estimated are closer to the
ground-truth. The mean distortion error for the Qual-
comm is around 1.53 pixel while the initial parameter
(k
1
, k
2
= 0) gives an error of 4.25 pixel.
4 CONCLUSION
The convergence of the the self-calibrating bundle
adjustment needed to recover the camera parameters
that is required for depth generation in the popular
uncalibrated Depth from Small Motion algorithm (Ha
et al., 2016) has not been well studied. Realistically,
the convergence for the optimization procedure is not
guaranteed even with the use of large number of fra-
mes (i.e approximately 30 images). In this work, we
propose a new method that incorporates the rank-1
factorization as a way to initialize the camera para-
meters and inverse depth points robustly. This appro-
ach allow fast convergence of the bundle adjustment
procedure.
The experimental results on a real mobile platform
is presented. Compared with the state of art, our met-
hod can cope with a very small frame numbers to esti-
mate the parameters required for good depth-map ge-
neration. After several optimizations with OpenCL
GPU and CPU multi-threading procedures, the whole
algorithm on the mobile device take approximately
10s for full HD resolution images. For the future
work, we propose to investigate further the accuracy
of the generated depth-map as compared to the state
of art DfSM methods.
REFERENCES
Agarwal, S., Mierle, K., and Others (2012). Ceres solver.
In http://ceres-solver.org.
Aguiar, P. M. and Moura, J. M. F. (1999a). Factorization
as a rank 1 problem. In Proceedings of IEEE Compu-
ter Society Conference on Computer Vision and Pat-
tern Recognition (Cat. No PR00149), volume 1, pages
178–184.
Aguiar, P. M. Q. and Moura, J. M. F. (1999b). A fast
algorithm for rigid structure from image sequences.
In Proceedings of International Conference on Image
Processing (Cat. 99CH36348), volume 3, pages 125–
129.
Alismail, H., Browning, B., and Lucey, S. (2017). Photo-
metric bundle adjustment for vision-based slam. In
Computer Vision – ACCV 2016, pages 324–341.
Barron, J. T., Adams, A., Shih, Y., and Hernndez, C. (2015).
Fast bilateral-space stereo for synthetic defocus. In
IEEE Conference on Computer Vision and Pattern Re-
cognition (CVPR), pages 4466–4474.
Collins, R. T. (1996). A space-sweep approach to true
multi-image matching. In Proceedings CVPR IEEE
Depth from Small Motion using Rank-1 Initialization
527

Computer Society Conference on Computer Vision
and Pattern Recognition, pages 358–363.
Corcoran, P. and Javidnia, H. (2017). Accurate depth map
estimation from small motions. In IEEE International
Conference on Computer Vision Workshops (ICCVW),
pages 2453–2461.
Golub, G. H. and Van Loan, C. F. (1996). Matrix Com-
putations (3rd Ed.). Johns Hopkins University Press,
Baltimore, MD, USA.
Ha, H., Im, S., Park, J., Jeon, H., and Kweon, I. (2016).
High-quality depth from uncalibrated small motion
clip. In CVPR, pages 5413–5421. IEEE Computer So-
ciety.
Ham, C., Chang, M., Lucey, S., and Singh, S. (2017). Mo-
nocular depth from small motion video accelerated. In
International Conference on 3D Vision (3DV), pages
575–583.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In Proceedings of the 4th Alvey Vision
Conference, pages 147–151.
Hartley, R. and Zisserman, A. (2003). Multiple view geo-
metry in computer vision. New York, NY, USA. Cam-
bridge University Press.
Huber, P. J. (1992). Robust Estimation of a Location Pa-
rameter, pages 492–518. Springer New York, New
York, NY.
Joshi, N. and Zitnick, L. (2014). Micro-baseline stereo.
Technical report.
Kneip, L., Siegwart, R., and Pollefeys, M. (2012). Finding
the exact rotation between two images independently
of the translation. In Computer Vision – ECCV 2012,
pages 696–709, Berlin.
Koenderink, J. J. and van Doorn, A. J. (1991). Affine struc-
ture from motion. J. Opt. Soc. Am. A, 8(2):377–385.
Komodakis, N. and Paragios, N. (2009). Beyond pairwise
energies: Efficient optimization for higher-order mrfs.
In 2009 IEEE Conference on Computer Vision and
Pattern Recognition, pages 2985–2992.
Lucas, B. D. and Kanade, T. (1981). An iterative image re-
gistration technique with an application to stereo vi-
sion. In Proceedings of the 7th International Joint
Conference on Artificial Intelligence - Volume 2, IJ-
CAI’81, pages 674–679.
Sch
¨
anberger, J. L. and Frahm, J. (2016). Structure-from-
motion revisited. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 4104–
4113.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation
of multi-view stereo reconstruction algorithms. In
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR’06), volume 1,
pages 519–528.
Shi, J. and Tomasi (1994). Good features to track. In Pro-
ceedings of IEEE Conference on Computer Vision and
Pattern Recognition, pages 593–600.
Tang, C., Wang, O., and Tan, P. (2017). Globalslam:
Initialization-robust monocular visual SLAM. CoRR,
abs/1708.04814.
Tomasi, C. and Kanade, T. (1992). Shape and motion
from image streams under orthography: a factoriza-
tion method. International Journal of Computer Vi-
sion, 9(2):137–154.
Triggs, B., McLauchlan, P. F., Hartley, R. I., and Fitzgibbon,
A. W. (2000). Bundle adjustment - a modern synthe-
sis. In Proceedings of the International Workshop on
Vision Algorithms: Theory and Practice, ICCV ’99,
pages 298–372, London, UK, UK. Springer-Verlag.
Yu, F. and Gallup, D. (2014). 3d reconstruction from ac-
cidental motion. In IEEE Conference on Computer
Vision and Pattern Recognition, pages 3986–3993.
Zhang, Z. (2000). A flexible new technique for camera
calibration. IEEE Trans. Pattern Anal. Mach. Intell.,
22(11):1330–1334.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
528
