
A Coarse and Relevant 3D Representation for Fast and Lightweight
RGB-D Mapping
Bruce Canovas, Michele Rombaut, Amaury Negre, Serge Olympieff and Denis Pellerin
Univ. Grenoble Alpes, CNRS, Grenoble INP, GIPSA-lab, 38000 Grenoble, France
Keywords:
RGB-D, Dense Reconstruction, Superpixel, Surfel, Fusion, Robotics.
Abstract:
In this paper we present a novel lightweight and simple 3D representation for real-time dense 3D mapping of
static environments with an RGB-D camera. Our approach builds and updates a low resolution 3D model of
an observed scene as an unordered set of new primitives called supersurfels, which can be seen as elliptical
planar patches, generated from superpixels segmented RGB-D live measurements. While most of the actual
solutions focuse on the accuracy of the reconstructed 3D model, the implemented method is well-adapted to
run on robots with reduced/limited computing capacity and memory size, which do not need a highly detailed
map of their environment but can settle for an approximate one.
1 INTRODUCTION
Live 3D reconstruction from RGB-D data is a major
and active research topic in computer vision for robo-
tics. Indeed, to be able to interact in an environment,
a robot needs to have access in real-time to its 3D ge-
ometry. Several dense visual SLAM and 3D mapping
systems able to produce impressive results have been
proposed. They enable robots to simultaneously lo-
calize themselves, build and update a 3D map of an
observed scene.
Depending on the 3D representation they use to
model the observed scene, many state of the art 3D re-
construction systems are limited to small areas and/or
require heavy and costly hardware to operate properly
in real-time. Indeed, most of the softwares operate
with really accurate but expensive and memory con-
suming forms of representation while in many case
an approximate one can be sufficient for the needs of
a robot which does not have to perform classification
tasks, place recognition, or to localize with a centime-
ter accuracy. A good representation should be adapted
to the robotic system running the algorithm and to its
mission.
In this paper, we present a method based on a no-
vel representation to build and update iteratively an
approximate 3D model of an observed space, as a
set of piecewise planar elements called supersurfels,
from the segmentation in superpixels of the input live
video stream of a moving RGB-D camera. Our con-
tribution is a real-time and memory efficient 3D map-
ping system, called SupersurfelFusion, that accom-
plishes rough but light 3D reconstruction.
Our method is not designed to compete with the
level of detail of existing dense RGB-D 3D recon-
struction approaches. Instead, it aims to enable fast
3D mapping with good scalability on power restricted
platforms, or to serve as groundwork for applications
that require high efficiency. It has been developed un-
der ROS (Robot Operating System) for flexibility and
portability.
2 RELATED WORKS
Most of the actual 3D reconstruction systems with
RGB-D camera share a common pipeline, based on
a frame-to-model strategy. They build and update a
single global3D model of an observed scene, from an
input live RGB-D video stream. First the RGB-D me-
asurements are acquired and preprocessed. Then the
camera pose is estimated and the data of the current
frame are aligned to the predicted 3D model (frame-
to-global-model registration strategy). After that, the
newly aligned data are integrated/fused into the mo-
del. Finally the 3D model is cleaned and can be ren-
dered.
These systems mainly differ in the way they re-
present the target 3D scene. Volumetric (or voxel-
based) representations for 3D reconstruction systems
have been popularized with KinectFusion (Izadi et al.,
824
Canovas, B., Rombaut, M., Negre, A., Olympieff, S. and Pellerin, D.
A Coarse and Relevant 3D Representation for Fast and Lightweight RGB-D Mapping.
DOI: 10.5220/0007381708240831
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 824-831
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2011), one of the first methods to perform real-time
dense reconstruction using an RGB-D camera. Sy-
stems using volumetric representation build and up-
date a single high-quality 3D model along with live
RGB-D data, based on the volumetric fusion method
of (Curless and Levoy, 1996). The model is represen-
ted as a truncated signed distance function stored in a
regular 3D grid volume, known as voxel grid. Volu-
metric approaches are robust to noises and produce
really accurate results but are highly memory con-
suming and are thus limited to small environments.
Furthermore the volume and the resolution of the re-
gular grid have to be predefined. Another drawback
of voxel-based representation comes from the need to
transit between different data representations: first the
RGB-D data are extracted as a point-cloud conver-
ted to a continuous signed-distance function, which is
then discretised into a regular grid to update the mo-
del. Finally the reconstructed model is raycasted to
render the resulting reconstruction. Numerous other
volumetric approaches have been developed in order
to override these drawbacks or to improve the method,
such as Kintinuous (Whelan et al., 2012), a spatial
extension of KinectFusion, or Patch Volumes (Henry
et al., 2013) which presents a more compact represen-
tation.
Alternatively, point-based representations may
also be used. They represent the model as a set of
unordered 3D points or surfels. A surfel is a circu-
lar surface element which principally encodes a posi-
tion, a color, a normal, a radius (the point size), and
a confidence value that quantifies the reliability of the
surfel (states stable or unstable). A surfel is conside-
red as stable, reliable, if it has been repeatedly obser-
ved. In surfel-based approaches, such as PointBased-
Fusion (Keller et al., 2013) and ElasticFusion (Whe-
lan et al., 2015), the acquired RGB-D data are directly
stored and accumulated in a model composed of sur-
fels. Surfel-based representations are directly obtai-
ned from an RGB-D frame and can be used for ren-
dering without converting to an other form of repre-
sentation. Unlike volumetric approaches, point-based
systems do not provide a continuous surface recon-
struction. However, the resolution of the model does
not have to be predefined because each surfel size is
adapted to the accuracy limit of the sensor. Further-
more, free spaces do not need to be represented which
makes these methods more memory efficient. Even if
surfel-based reconstructions are usually lighter than
volumetrics, they are still expensive in memory and
computation (a 3D model can count about millions of
surfels).
Other approaches were developed too, such as
(Thomas and Sugimoto, 2013) (Salas-Moreno et al.,
2014), proposing to use sets of planes in their 3D
scene representation to make it more compact and
still achieve accurate reconstruction. The method
presented by (B
´
odis-Szomor
´
u et al., 2014) shares
many similarities with ours. Their multi-view ste-
reo algorithm combines sparse structure-from-motion
with superpixels to generate a lightweight, piecewise-
planar surface reconstruction. However it is not capa-
ble of real-time performances.
In the subsequent section, we introduce a new 3D
scene representation as a set of supersurfels, which
are simply oriented and colored elliptical planar pa-
tchs, generated from the superpixel segmentation of
RGB-D frames. The use of superpixels allows us to
considerably reduce the quantity of data to process
while preserving the meaningful information. Super-
surfels share similarities with surfels: they can be dis-
played directly through a traditional graphic pipeline
such as OpenGL and are easily updated. They allow
us to store a less accurate, but still relevant, and more
compact 3D model in memory, so as to achieve fast
mapping on multitasks or less performing embedded
platforms.
3 PIPELINE AND SUPERSURFEL
REPRESENTATION
The system developed, SupersurfelFusion, achieves
low resolution 3D reconstruction of static environ-
ments using an RGB-D camera. It builds, comple-
tes and updates a single global model in world space
coordinate R
W
R
W
R
W
, denoted as G
G
G, as a set of unordered
3D primitives named supersurfels (Figure 1). The
model G
G
G is updated at each acquisition from the set
of supersurfels F
F
F associated to the current frame.
Figure 1: Oriented supersurfel defined in world space coor-
dinate system R
W
(O;X
w
,Y
w
,Z
w
), with position p
k
p
k
p
k
, length
l
1k
l
1k
l
1k
and width l
2k
l
2k
l
2k
.
A supersurfel can be seen as an approximation of
the 3D reprojection (from 2D to 3D space) of an as-
A Coarse and Relevant 3D Representation for Fast and Lightweight RGB-D Mapping
825

sociated superpixel. A Superpixel (Ren and Malik,
2003) defines a group of connected pixels sharing ho-
mogeneous informations (color and surface for RGB-
D superpixels). A supersurfel G
k
G
k
G
k
∈ G
G
G is simply an
elliptical planar patch in 3D space, that encodes its
centroid position p
k
p
k
p
k
∈ R
3
, an orientation R
k
R
k
R
k
∈ SO
3
,
a color c
k
c
k
c
k
∈ R
3
, longitudinal and lateral elongations
l
1k
l
1k
l
1k
∈ R and l
2k
l
2k
l
2k
∈ R, a timestamp t
k
t
k
t
k
∈ N to store the
last time it has been observed, a confidence weight
w
k
w
k
w
k
∈ R
+
to quantify its state (stable or unstable) and
a 3D covariance matrix Σ
k
Σ
k
Σ
k
∈ M
3
(R) to describe its
shape.
The system takes as input live registered RGB-D
pairs of images (C
t
C
t
C
t
,Z
t
Z
t
Z
t
), with C
t
C
t
C
t
: Ω
Ω
Ω → R
3
the color
image at time t
t
t, Z
t
Z
t
Z
t
: Ω
Ω
Ω → R the associated depth map
and Ω
Ω
Ω the image plane. The 3D reconstruction pi-
peline can then be divided in 4 steps:
1. First the incoming RGB-D frame is segmented in
superpixels.
2. The resulting superpixels are then used to gene-
rate a set of supersurfels F
F
F in camera space R
C
R
C
R
C
.
3. After that the 6DOF pose of the camera in world
space R
W
R
W
R
W
is estimated from a visual odometry
solution such as ORB-SLAM2 (Mur-Artal and
Tard
´
os, 2017), a feature-based SLAM system, or
the open source OpenCV RGB-D odometry based
on the direct frame-to-frame registration method
of (Steinbr
¨
ucker et al., 2011).
4. Finally, the pose of the camera is used to trans-
form current frame supersurfels F
F
F from camera
R
C
R
C
R
C
to world space R
W
R
W
R
W
and enable the update of
the model G
G
G.
The segmentation in superpixels, the generation of
supersurfels and the fusion of data have been imple-
mented on GPU with CUDA library, to benefit from
the high computational power of this device. In order
for our algorithm to be flexible and easily integrated
to a complete robotic system, it has been designed to
work under ROS.
4 GENERATION OF
SUPERSURFELS
This section describes the process that compute the
set F
F
F of current frame supersurfels from color and
depth data.
4.1 Segmentation in Superpixels
First, the newly acquired RGB-D frame is segmented
into N superpixels C = {C
h
C
h
C
h
, h = 1, ...,N}. A super-
pixel is a group of homogeneous pixels u
j
u
j
u
j
, for j =
1,2,..., M with M the size of the superpixel, sharing
similar color and for which their 3D reprojections can
be fit to an identical plane in 3D space. A CUDA
implementation of the approach described in (Yama-
guchi et al., 2014) is applied to partition the current
frame into suitable superpixels, that is to say which
preserve as much as possible boundaries and depth
discontinuities. The algorithm starts from the bre-
akdown of an image into a regular grid (for instance
the image is divided into groups of 20x20 pixels) and
iteratively shifts the boundaries of the superpixels by
minimizing a cost function which preserves the topo-
logy.
4.2 Extraction of Supersurfels
Then a supersurfel F
i
F
i
F
i
∈ F
F
F , where F
F
F defines the set
of supersurfels associated to the current frame, is ge-
nerated for each suitable superpixel C
h
C
h
C
h
, as shown in
Figure 2. The position p
i
p
i
p
i
of the supersurfel F
i
F
i
F
i
, is
the mean value of the 3D reprojections π(u
j
,Z
t
(u
j
)
u
j
,Z
t
(u
j
)
u
j
,Z
t
(u
j
))
of the u
j
u
j
u
j
pixels contained in C
h
C
h
C
h
. The color c
i
c
i
c
i
is set
as the average colors, in CIELAB color space, of the
pixels contained in the superpixel. Principal Com-
ponent Analysis (PCA) technique is adopted to esti-
mate the orientation R
i
R
i
R
i
and the longitudinal and la-
teral elongations l
1i
l
1i
l
1i
, l
2i
l
2i
l
2i
. The covariance matrix Σ
i
Σ
i
Σ
i
is
computed according to the following formula:
Σ
i
=
1
M−1
∑
M
j=1
(π(u
j
,Z
t
(u
j
)) − p
i
)(π(u
j
,Z
t
(u
j
)) − p
i
)
T
.
(1)
The matrix is diagonalized, which gives three eigen-
vectors e
1i
e
1i
e
1i
,e
2i
e
2i
e
2i
,e
3i
e
3i
e
3i
and their associated eigenvalues
λ
1i
λ
1i
λ
1i
,λ
2i
λ
2i
λ
2i
,λ
3i
λ
3i
λ
3i
(λ
1i
λ
1i
λ
1i
> λ
2i
λ
2i
λ
2i
> λ
3i
λ
3i
λ
3i
). The orientation R
i
R
i
R
i
cor-
responds to the eigenvectors, with e
3i
e
3i
e
3i
the eigenvec-
tor belonging to the smallest eigenvalue being an es-
timate for the normal of the supersurfel. The longi-
tudinal and lateral elongations l
1i
l
1i
l
1i
,l
2i
l
2i
l
2i
are respectively
defined by the square root of the largest λ
1i
λ
1i
λ
1i
and the
medium eigenvalues λ
2i
λ
2i
λ
2i
, scaled by a constant factor
s
s
s. For instance, s
s
s = 2.4477 gives us the 95% confi-
dence ellipse associated to the set of points defined
by the π(u
j
,Z
t
(u
j
)
u
j
,Z
t
(u
j
)
u
j
,Z
t
(u
j
)) 3D reprojections. The timestamp
t
i
t
i
t
i
simply received the current time t
t
t. The confidence
weight w
i
w
i
w
i
is set to a low value at initialization, cor-
responding to the ratio between the number of pixels
with valid depth (that is to say for which the depth is
provided by the depth map Z
t
Z
t
Z
t
) in superpixel C
h
C
h
C
h
and
the total number of pixels it contains:
w
i
← pixels
valid
/pixels
total
. (2)
Disproportionate supersurfels, for which l
1i
l
1i
l
1i
/l
2i
l
2i
l
2i
surpasses a fixed threshold, are subdivided lengthwise
in two parts, so as to ensure supersurfels of regular si-
zes. Like (Keller et al., 2013) with surfels, we discard
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
826

Figure 2: Generation of supersurfels from a superpixels seg-
mented RGB frame and its associated filtered depth (even
if considered as elliptical planar patches, supersurfels are
displayed as rectangular patches to ease and accelerate the
rendering).
any supersurfel having its normal seen under an inci-
dence angle θ
θ
θ larger than θ
max
θ
max
θ
max
and we only generate
supersurfels when the depth of the associated super-
pixels is less than z
max
z
max
z
max
, with z
max
z
max
z
max
set according to the
accuracy of the sensor.
5 MODEL UPDATE
The system maintains and extends a single global mo-
del G
G
G as a set of supersurfels G
k
G
k
G
k
stored in a flat array
indexed by k
k
k ∈ N. Newly generated supersurfels F
F
F ,
from the current frame, are either added in the model
or merged with similar supersurfels from the model.
Merging a supersurfel F
i
F
i
F
i
∈ F
F
F with G
k
G
k
G
k
will increase
the confidence weight w
k
w
k
w
k
of G
k
G
k
G
k
. That way, a supersur-
fel from the model will change its status from unsta-
ble to stable if it is repeatedly observed. As in (Keller
et al., 2013), supersurfels with w
k
w
k
w
k
> w
stable
w
stable
w
stable
are consi-
dered as stable.
5.1 Data Association
In this step, we look for each newly generated super-
surfel F
i
F
i
F
i
, whether a similar supersurfel G
k
G
k
G
k
already
exists in the predicted 3D model G
G
G. The purpose is to
fuse alike supersurfels, in order to avoid duplications,
redundancies, and to refine the model.
First, knowing the current pose of the sensor (pro-
vided by ground-truth measurements or estimated by
an external visual-odometry system), supersurfels F
i
F
i
F
i
in F
F
F are aligned with the model. Then, we carry out
a nearest neighbours search for each F
i
F
i
F
i
, through a
Bounding Volume Hierarchy (BVH) (Kay and Kajiya,
1986). The BVH is build based on the supersurfels
from the predicted model which are contained in the
field of view of the camera at current time. The search
is performed in camera space and the BVH is genera-
ted following the implementation on GPU by (Karras,
2012). It is an acceleration structure, which allows to
organize the 3D reconstructed scene in a binary se-
arch tree of bounding volumes. It thus reduces the
time complexity of the research. Leaf nodes are su-
persurfels from the model wrapped in minimum axis-
aligned bounding box. The minimum axis-aligned
bounding box of an object is the smallest box contai-
ning all of the points of the object and having its edges
parallel to the reference coordinate system axes. Leaf
nodes are grouped and enclosed by bigger bounding
boxes representing the nodes of the tree. Each node
is an axis aligned bounding box of its children. All
the leaf supersurfels where the associated bounding
volumes contain the center p
i
p
i
p
i
of the supersurfel F
i
F
i
F
i
from the current frame, are added to the set of nearest
neighbours.
We use the symmetric Kullback-Leibler diver-
gence to find out the G
k
G
k
G
k
most similar to F
i
F
i
F
i
, among
the supersurfels from the model G
G
G selected as nearest
neighbours. The symmetric Kullback-Leibler diver-
gence can be defined as:
KLD(F
i
||G
k
) =
1
2
{tr(Σ
−1
i
Σ
k
+ Σ
−1
k
Σ
i
)
+ (p
i
− p
k
)
T
(Σ
−1
i
+ Σ
−1
k
)(p
i
− p
k
)} − 3. (3)
The use of the Kullback-Leiber divergence as a dis-
tance has been proposed by (Davis and Dhillon,
2006), in order to perform gaussian clustering. It al-
lows to value the dissimilarity between two supersu-
fels in terms of position, orientation and shape.
To ensure that supersurfels too different are not
associated we also proceed to a series of checkups:
1. We check that the divergence angle between the
normals is small: arcos(< n
i
n
i
n
i
,n
k
n
k
n
k
>)×180/π < ε
1
,
with ε
1
usually set to 10 degrees.
2. We compare their areas: |a < l
1i
l
1i
l
1i
l
2i
l
2i
l
2i
/l
1k
l
1k
l
1k
l
2k
l
2k
l
2k
| < b,
with a,b ∈ R (for instance set to a = 0.5 and b = 2
if we want to excludes supersurfels which are at
least twice bigger or twice smaller than F
i
F
i
F
i
).
3. We look up if their colors are close: ∆E
∗
c
i
c
k
c
i
c
k
c
i
c
k
< ε
2
where ∆E
∗
c
i
c
k
c
i
c
k
c
i
c
k
is the distance between two colors in
CIELAB color space, ignoring the lightness com-
ponents so as to consider only chromatic informa-
tion and be robust against light intensity variati-
ons. The threshold ε
2
can be fixed to 10.
A Coarse and Relevant 3D Representation for Fast and Lightweight RGB-D Mapping
827

If no correspondent G
k
G
k
G
k
is found in the model G
G
G,
F
i
F
i
F
i
is simply added into the model. Else, the super-
surfel G
k
G
k
G
k
from the model G
G
G, which minimizes the
symmetric Kullback-Leibler divergence (Equation 3)
is selected as a match and data fusion is applied.
5.2 Fusion
After data association, for each pair of corresponden-
ces (G
k
G
k
G
k
,F
i
F
i
F
i
) found, we update the attributes of G
k
G
k
G
k
from F
i
F
i
F
i
ones so as to refine the reconstruction. The
new position p
0
k
p
0
k
p
0
k
and covariance Σ
0
k
Σ
0
k
Σ
0
k
are computed by
applying covariance intersection strategy:
Σ
0−1
k
= αΣ
−1
k
+ (1 − α)Σ
−1
i
, (4)
p
0
k
= Σ
0
k
(αΣ
−1
k
p
k
+ (1 − α)Σ
−1
i
p
i
), (5)
α =
w
k
w
k
+ w
i
. (6)
The updated color c
0
k
c
0
k
c
0
k
is obtained by a weighted
average in CIELAB color space:
c
0
k
=
w
k
c
k
+ w
i
c
i
w
k
+ w
i
. (7)
To compute updated values for the orientation R
0
k
R
0
k
R
0
k
and
the longitudinal and lateral elongations l
0
1k
l
0
1k
l
0
1k
and l
0
2k
l
0
2k
l
0
2k
, the
same PCA procedure as during the supersurfels gene-
ration step is applied. The confidence weight w
0
k
w
0
k
w
0
k
is
incremented:
w
0
k
= min(w
k
+ w
i
,w
max
). (8)
The truncation of the confidence weight over a max-
imum value w
max
w
max
w
max
is needed if we want new super-
surfels with low confidence to still have a minimum
influence on old stable supersurfels. A supersurfel is
considered stable when its confidence exceed a fixed
threshold w
stable
w
stable
w
stable
. The timestamp is also updated with
current time value:
t
0
k
= t. (9)
5.3 Removal of Outliers
Lastly, different strategies are applied to remove out-
liers, due to noisy data, and filter the 3D model. Su-
persurfels that stay in an unstable state for too long
are removed after ∆t
∆t
∆t steps and the confidence value
of supersurfels from the model in the field of view of
the camera, but not updated, is decreased.
A simple detection of free-space violations is also
performed to remove all the supersurfels from the pre-
dicted 3D global model G
G
G that lie in front of newly
updated supersurfels, with regard to the camera. To
find these supersurfels to be removed, we compare the
value of the z
z
z coordinate of the center p
k
p
k
p
k
of each su-
persurfel G
k
G
k
G
k
from G
G
G, expressed in camera space at
time t − 1
t − 1
t − 1, with the value of the current frame depth
map Z
t
Z
t
Z
t
at pixel u
k
u
k
u
k
. Pixel u
k
u
k
u
k
corresponds to the loca-
tion of the perspective projection of the center p
k
p
k
p
k
in
the image plane Ω
Ω
Ω. A supersurfel G
k
G
k
G
k
is removed if
the following relation is verified:
z < Z
t
(u
k
). (10)
6 EXPERIMENTS AND RESULTS
We used an Asus Xtion Live Pro camera (640x480
image resolution, acquisition frequency of 30 fps) for
our experiments and a laptop equipped with an Nvidia
GTX 950M GPU and an Intel Core i5-6300HQ CPU.
We performed quantitative and qualitative evaluations
of our solution using our own video sequences, se-
quences from the TUM RGB-D benchmark dataset
(Sturm et al., 2012) and from the ICL-NUIM data-
set (Handa et al., 2014). Supersurfels are rendered as
rectangular planar patches to accelerate the viewing.
The quantitative results are given for two diffe-
rent levels of resolution of SupersurfelFusion recon-
struction: 3D supersurfels reconstruction obtained
from the segmentation of input RGB-D pairs in super-
pixels of about 100 pixels and the one obtained from
the segmentation in superpixels of about 400 pixels.
Smaller superpixels generate more and finer supersur-
fels and tend to produce a more accurate map, as we
can see on Figure 5, even if that is not the purpose
of our method. In man made environment with large
planar surfaces, wide superpixels allow a sufficiently
suitable 3D reconstruction. However when the obser-
ved area is composed of thin and detailed objects (and
according to the level of detail required by the user)
smaller superpixels better fit the boundaries and ena-
ble to build a more complete model.
6.1 Qualitative Results
Figure 3 shows some reconstructed scenes. The obtai-
ned 3D model is dense and even some fine or cur-
ved elements such as the legs of the table or the back
of the chair are well reproduced. This outlines that
our representation is able to preserve meaningfull in-
formations and is not a simple point cloud extracted
from a downsized or decimated RGB-D frame. The
approach is well adapted to local mapping tasks be-
cause it generates large supersurfels for distant ele-
ments which are then refined by the fusion procedure
when the sensor comes closer. Close elements are dis-
played with higher accuracy, represented by smaller
supersurfels, contrary to distant ones.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
828
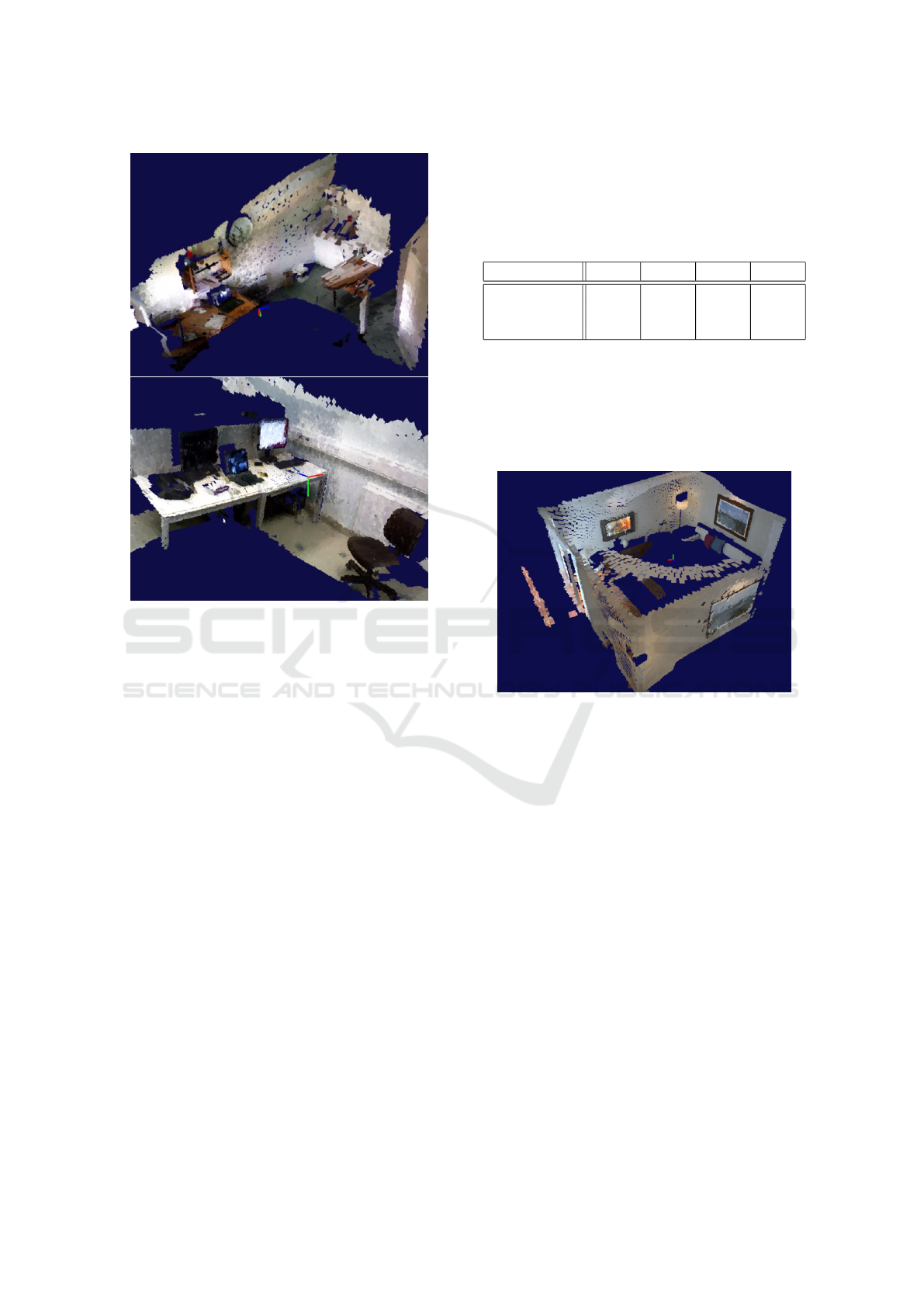
Figure 3: Supersurfels reconstructions of our office envi-
ronments (superpixel size ' 100 pixels).
6.2 Accuracy of the Surface Estimation
Although accuracy is not the purpose of our method,
it is important that the 3D map built by SupersurfelFu-
sion is relevant and represents well the real environ-
ment. We evaluate the quality of the surface recon-
structed by our approach on the living room scene of
the ICL-NUIM dataset of (Handa et al., 2014). This
dataset provides four synthetic noisy RGB-D video
sequences, with associated ground-truth trajectories
and a ground-truth 3D model of the environment. An
example of our system running on this dataset can be
viewed on Figure 4. To evaluate the surface estima-
tion produced by our approach we convert our super-
surfels model to a dense point cloud by oversampling
the surface of each supersurfel. We then compute the
mean distances from each point of the obtained point
cloud to the nearest surface of the ground-truth 3D
model.
Results presented Table 1 show that even if Su-
persurfelFusion generates a rough 3D model, a cer-
tain accuracy can still be maintained in simple indoor
environments. We also add results obtained with the
state of the art accurate solution ElasticFusion (Whe-
lan et al., 2015), running with its default configuration
with provided ground-truth.
Table 1: Surface reconstruction accuracy results on the ICL-
NUIM (Handa et al., 2014) synthetic dataset, for Super-
surfelFusion with superpixels of about 100 pixels (SFusion
100), with superpixels of about 400 pixels (SFusion 400)
and ElasticFusion (EFusion). Mean distances (m) from
each point of the reconstruction to the nearest surface in the
ground-truth 3D model are shown.
System kt0 kt1 kt2 kt3
SFusion 100 0.009 0.011 0.017 0.010
SFusion 400 0.013 0.013 0.020 0.021
EFusion 0.003 0.005 0.002 0.004
We recall that our goal is not to challenge the
accuracy of others state of the art systems. Instead
we want to show that our strategy for approximate 3D
reconstruction, based on the supersurfels representa-
tion, enable a performance improvement in speed and
memory usage.
Figure 4: Supersurfels reconstruction of the living room for
the sequence kt1 of the ICL-NUIM dataset (Handa et al.,
2014).
6.3 Computational Performance
To evaluate the performance of our solution we took
videos from (Sturm et al., 2012). This dataset pro-
vides real RGB-D video sequences with associated
ground-truth measurements of the pose of the camera
that we used as replacement of the visual odometry
block. As a means of comparison, here again we
present results acquired with ElasticFusion (Whelan
et al., 2015), running with its default configuration
with provided ground-truth, on our test platform.
Table 2 presents the execution time of Supersur-
felFusion and ElasticFusion systems for 4 different
videos. Real-time execution is achieved for both le-
vels of resolution with SupersurfelFusion on non pro-
fessional GPU, even if as expected using smaller su-
perpixels slow down the process. There is no in-
terest or advantages of using our method with too
small superpixels because it would run with similar
or worst performance than other standard approaches
A Coarse and Relevant 3D Representation for Fast and Lightweight RGB-D Mapping
829
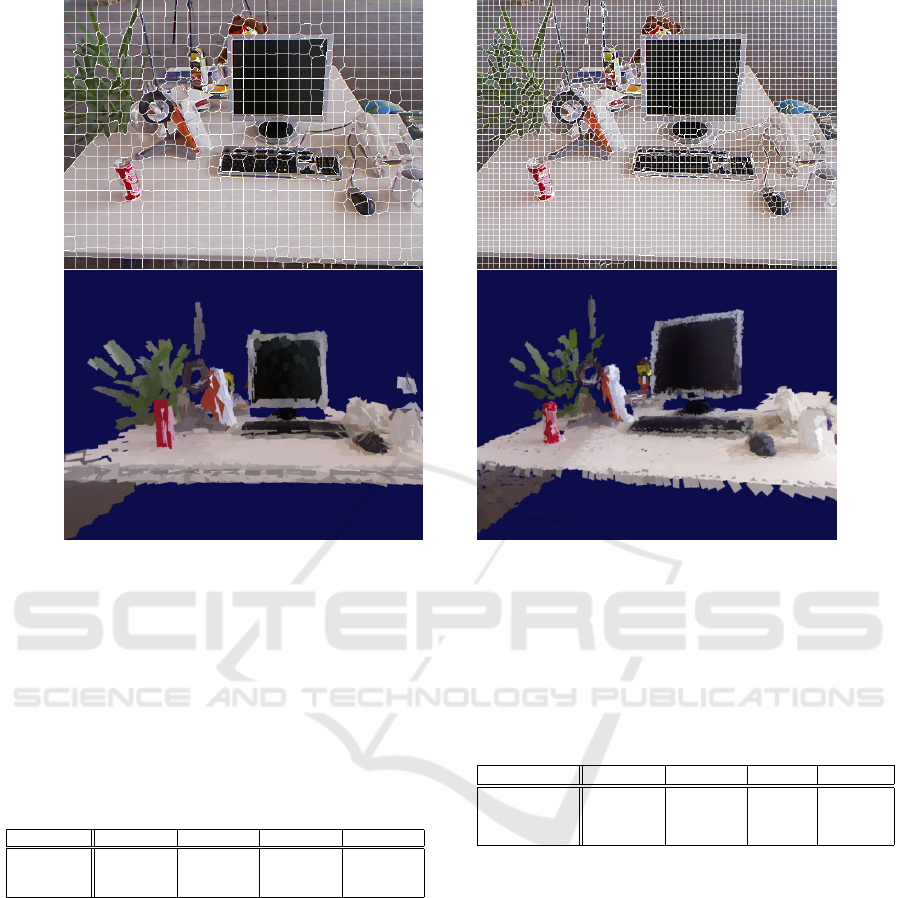
Figure 5: Comparison between 3D reconstruction results on the fr2/rpy sequence, from the TUM RGB-D benchmark data-
set (Sturm et al., 2012), using SupersurfelFusion configured to generate superpixels of about 400 pixels (left column) and
superpixels containing about 100 pixels (right column).
using every pixels, due to the time consuming super-
pixels segmentation task which is mainly dependant
of the input image size.
Table 2: Run time (Mean ± Std ms) of SupersurfelFusion
with superpixels of about 100 pixels (SFusion 100), 400
pixels (SFusion 400) and ElasticFusion (EFusion). Evalu-
ation performed on sequences from the TUM RGB-D ben-
chmark dataset (Sturm et al., 2012).
System fr1/room fr1/plant fr2/rpy fr2/desk
SFusion 100 35.3 ± 13.7 33.2 ± 6.83 25.9 ± 4.41 28.3 ± 5.79
SFusion 400 23.7 ± 2.27 23.8 ± 3.72 21.2 ± 9.01 22.2 ± 2.66
EFusion 58.1 ± 9.26 53.0 ± 7.81 50.4 ± 1.06 73.1 ± 2.02
Table 3 shows the memory footprint of the mo-
del reconstructed by SupersurfelFusion and Elasti-
cFusion. The method requires a small amount of
memory to store the model, thanks to the fact that
unlike traditional point-based reconstruction approa-
ches, which generate a surfel for each pixel, we only
considered a restricted set of 3D superpixel-based pri-
mitives for each image. However each supersurfel
uses bigger storage than a basic surfel structure. The
short memory usage offers the possibility to recon-
struct large size 3D models. We can see that Elasti-
cFusion uses way more memory than our coarse 3D
reconstruction method (about 10 times with regard
to SupersurfelFusion using superpixels of about 400
pixels).
Table 3: Maximal memory usage (MB) of the reconstructed
model for SupersurfelFusion with superpixels of about 100
pixels (SFusion 100), 400 pixels (SFusion 400) and Elas-
ticFusion (EFusion). Evaluation performed on sequences
from the TUM RGB-D benchmark dataset (Sturm et al.,
2012).
System fr1/room fr1/plant fr2/rpy fr2/desk
SFusion 100 20.9 18.3 5.83 7.88
SFusion 400 5.23 4.41 1.45 2.37
EFusion 52.3 33.0 19.1 58.6
As expected, the lower the resolution of Supersur-
felFusion is, the better are the results in terms of speed
and memory usage. The user should fix the adapted
resolution according to the task and the working en-
vironment of the robot. The system has been tested
on an NVIDIA Jetson TX1 embedded board too, sho-
wing similar performance and results.
7 CONCLUSION
In this paper, a novel representation for 3D recon-
struction of static environments with RGB-D came-
ras is presented. The reconstructed 3D model is de-
fined as a set of oriented and colored elliptical pla-
nar patches, extracted from the segmentation in su-
perpixels of a live RGB-D video stream. The use of
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
830

superpixels to generate the coarse 3D primitives (su-
persurfels) composing the predicted model guarantee
the preservation of most of the relevant and meaning-
ful information from the observed scene.
The reconstruction system proposed, Supersurfel-
Fusion, based on this representation, rebuild a low-
resolution but pertinent 3D model with high speed
performance and low memory usage. The use of this
system is of interest for robots which do not need a
very accurate but rather an efficient, fast and light-
weight 3D map generation, enabling them to perform
other tasks at the same time without consuming too
much of the resources available.
As future works, we would like to integrate our
own camera tracking solution to this system, as frame
to model registration strategy, and make it robust to
dynamic environments by detecting moving objects
at a superpixel level and tracking them. Further opti-
mization can be achieved to speed up the computation
of supersurfels attributes by minimizing branch diver-
gence.
REFERENCES
B
´
odis-Szomor
´
u, A., Riemenschneider, H., and Gool, L. V.
(2014). Fast, approximate piecewise-planar modeling
based on sparse structure-from-motion and super-
pixels. In 2014 IEEE Conference on Computer Vision
and Pattern Recognition, pages 469–476.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd Annual Conference on Compu-
ter Graphics and Interactive Techniques, SIGGRAPH
’96, pages 303–312, New York, NY, USA. ACM.
Davis, J. V. and Dhillon, I. (2006). Differential entropic
clustering of multivariate gaussians. In Proceedings
of the 19th International Conference on Neural Infor-
mation Processing Systems, NIPS’06. MIT Press.
Handa, A., Whelan, T., McDonald, J., and Davison, A.
(2014). A benchmark for RGB-D visual odometry,
3D reconstruction and SLAM. In IEEE Intl. Conf. on
Robotics and Automation, ICRA.
Henry, P., Fox, D., Bhowmik, A., and Mongia, R. (2013).
Patch volumes: Segmentation-based consistent map-
ping with rgb-d cameras. In 3DV. IEEE Computer
Society.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfusion:
Real-time 3d reconstruction and interaction using a
moving depth camera. In Proceedings of the 24th An-
nual ACM Symposium on User Interface Software and
Technology. ACM.
Karras, T. (2012). Maximizing parallelism in the con-
struction of bvhs, octrees, and k-d trees. In Procee-
dings of the Fourth ACM SIGGRAPH / Eurographics
Conference on High-Performance Graphics, EGGH-
HPG’12. Eurographics Association.
Kay, T. L. and Kajiya, J. T. (1986). Ray tracing complex
scenes. In Proceedings of the 13th Annual Confe-
rence on Computer Graphics and Interactive Techni-
ques, SIGGRAPH ’86. ACM.
Keller, M., Lefloch, D., Lambers, M., Izadi, S., Weyrich,
T., and Kolb, A. (2013). Real-time 3d reconstruction
in dynamic scenes using point-based fusion. In 2013
International Conference on 3D Vision - 3DV 2013.
Mur-Artal, R. and Tard
´
os, J. D. (2017). ORB-SLAM2: an
open-source SLAM system for monocular, stereo and
RGB-D cameras. IEEE Transactions on Robotics.
Ren and Malik (2003). Learning a classification model for
segmentation. In Proceedings Ninth IEEE Internatio-
nal Conference on Computer Vision.
Salas-Moreno, R. F., Glocken, B., Kelly, P. H. J., and Da-
vison, A. J. (2014). Dense planar slam. In 2014 IEEE
International Symposium on Mixed and Augmented
Reality (ISMAR), pages 157–164.
Steinbr
¨
ucker, F., Sturm, J., and Cremers, D. (2011). Real-
time visual odometry from dense rgb-d images. In
2011 IEEE International Conference on Computer Vi-
sion Workshops (ICCV Workshops).
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
rgb-d slam systems. In Proc. of the International Con-
ference on Intelligent Robot Systems (IROS).
Thomas, D. and Sugimoto, A. (2013). A flexible scene
representation for 3d reconstruction using an rgb-d
camera. In 2013 IEEE International Conference on
Computer Vision, pages 2800–2807.
Whelan, T., Kaess, M., Fallon, M., Johannsson, H., Leo-
nard, J., and McDonald, J. (2012). Kintinuous: Spati-
ally extended kinectfusion. In RSS Workshop on RGB-
D: Advanced Reasoning with Depth Cameras, Syd-
ney, Australia.
Whelan, T., Leutenegger, S., Moreno, R. S., Glocker, B.,
and Davison, A. (2015). Elasticfusion: Dense slam
without a pose graph. In Proceedings of Robotics:
Science and Systems.
Yamaguchi, K., McAllester, D., and Urtasun, R. (2014). Ef-
ficient joint segmentation, occlusion labeling, stereo
and flow estimation. In ECCV.
A Coarse and Relevant 3D Representation for Fast and Lightweight RGB-D Mapping
831
