
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time
Dense 3D Reconstruction
Antoine Billy
1,2
, S
´
ebastien Pouteau
1
, Pascal Desbarats
1
, Serge Chaumette
1
and Jean-Philippe Domenger
1
1
Laboratoire Bordelais de Recherches en Informatique, Universit
´
e de Bordeaux, France
2
Innovative Imaging Solutions, Pessac, France
Keywords:
SLAM, Stereo Vision, Synthetic Dataset, Alastor, Adaptive Frame Rate Selection.
Abstract:
In robotic mapping and navigation, of prime importance today with the trend for autonomous cars, simultane-
ous localization and mapping (SLAM) algorithms often use stereo vision to extract 3D information of the sur-
rounding world. Whereas the number of creative methods for stereo-based SLAM is continuously increasing,
the variety of datasets is relatively poor and the size of their contents relatively small. This size issue is incre-
asingly problematic, with the recent explosion of deep learning based approaches, several methods require an
important amount of data. Those multiple techniques contribute to enhance the precision of both localization
estimation and mapping estimation to a point where the accuracy of the sensors used to get the ground truth
might be questioned. Finally, because today most of these technologies are embedded on on-board systems,
the power consumption and real-time constraints turn to be key requirements. Our contribution is twofold: we
propose an adaptive SLAM method that reduces the number of processed frame with minimum impact error,
and we make available a synthetic flexible stereo dataset with absolute ground truth, which allows to run new
benchmarks for visual odometry challenges. This dataset is available online at http://alastor.labri.fr/.
1 INTRODUCTION
The ability for a machine to navigate autonomously
has become a central challenge for nowadays robotic
science. Building a model of the surrounding world
and having the capacity to work out its location (posi-
tion and orientation) in the generated map allows a ro-
bot to ”understand” information of an unknown area.
This feature is called Simultaneous Localization And
Mapping (SLAM). A machine with such a skill can
estimate a path, provide ergonomic visualization for
human users and even reset its localization estimation
by revisiting known areas. Its application for autono-
mous vehicles such as cars (Geiger et al., 2012; Ho-
ward, 2008; Lategahn et al., ) or UAV (Karlsson et al.,
; Cvi
ˇ
si
´
c et al., 2017; Caballero et al., ), has been illus-
trated many times over. To be aware of its environ-
ment, the robot must obviously be equipped with sen-
sors. Several types of sensors give birth to different
SLAM algorithms. Although the state of the robot is
often described in similar ways (its position and ro-
tation, sometimes with additional information such as
its velocity, sensor orientation or biases, battery or any
other accessible information), the map representation
is still debated. They go from sparse representations
with only landmarks, connected graphs or obstacles
to dense (Geiger et al., 2011) or semi-dense (Engel
et al., 2014) reconstruction with (e.g. stereo vision)
or without colour information (e.g. most LiDAR sys-
tems).
Tactile sensors outputs are extremely sparse as
they contain only information about points very close
to the agent, so they require strong prior models to
compensate. Thus, most modern methods use laser
scans or visual features. They provide details of many
points within an area, sometimes rendering SLAM in-
ference unnecessary because shapes in these clouds
of points can be easily and unambiguously aligned
at each step via image registration. Optical sensors
may be one-dimensional or 2D laser range-finders,
3D High Definition LiDAR, 2D or 3D sonar sensors,
one or more 2D cameras. Since 2005, there has been
intense research into visual SLAM primarily using ca-
meras, because of the increasing availability of came-
ras such as those in mobile devices or UAV. Moreo-
ver, the use of two 2D cameras to mimic the human
stereo vision system has become very popular in a
great number of robotic applications. Besides being
relatively cheap systems compared to LiDAR or so-
nar based approaches, stereo-based methods possess
the huge advantage of avoiding scale drift which ty-
pically occurs in monocular SLAM. They have the
840
Billy, A., Pouteau, S., Desbarats, P., Chaumette, S. and Domenger, J.
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time Dense 3D Reconstruction.
DOI: 10.5220/0007386508400848
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 840-848
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ability to quickly generate a dense point cloud esti-
mation. These two main advantages have made ste-
reo based systems a vast field of research and a well-
established approach for SLAM algorithms (Howard,
2008; Cvi
ˇ
si
´
c et al., 2017; Geiger et al., 2011; Engel
et al., ; Kuschk et al., 2017; Tanner et al., ; Sanfour-
che et al., ; Kaess et al., ; Zhu, 2017; Pire et al., 2018;
Cvi
ˇ
si
´
c and Petrovi
´
c, 2015; Kitt et al., 2010).
These algorithms use stereo visual odometry to
solve the SLAM problem as accurately as possible,
and the results of most of them are really impres-
sive. Due to their objective, SLAM algorithms are
often embedded on on-board systems, making them
truly autonomous. However, the robots have their
own limitations in terms of memory, computation po-
wer and battery. In that respect, whereas most of mo-
dern SLAM methods tend to exploit every available
piece of computational power to improve their accu-
racy, our first contribution in this paper is to suggest
an adaptive SLAM algorithm that modulates its input
frame rate to avoid unnecessary computation. Saving
time, power and thus making the autonomy of the sy-
stem that embeds it.
Despite the popular success of stereo based
SLAM, the number of available benchmarks on which
they can be tested is relatively poor. Indeed, buil-
ding such a real-world dataset with a high precision
level can be an extremely time-consuming task and
requires complex equipment and consequently expen-
sive human work. And even then, the ground truth is
highly sensitive to the manual labelling method that
is used and/or the precision of the sensors. This turns
out to be a real issue because of the constantly increa-
sing precision of new SLAM algorithms: their evalua-
tion requires more precise ground truth to which their
results could be compared. Finally, aiming at proving
the efficiency of our adaptive SLAM method, a da-
taset with tunable parameters such as modular frame
rate or customizable resolution was required, which
unfortunately did not exist. The second contribution
of this paper is thus the presentation of a synthetic
benchmark generation tool that we have designed and
developed: Alastor. In addition to fulfilling the pre-
viously unavailable requirements described above, it
offers two major advantages compared to real-world
datasets: 1. it comes with a perfect ground truth and it
ensures no error coming from the sensors; 2. it eases
the generation of an extensive amount of stereo data,
which is an insatiable request from neural networks
based methods that become more and more popular.
An example of the Alastor output is shown on figure1.
(a) (b)
Figure 1: Alastor simulator engine output. (a) Simulation
of a stereo system embedded on a car. (b) same system on
an UAV.
2 RELATED WORKS
As mentioned in section 1, a large number of methods
that use stereo visual odometry already exist. These
methods build a 3D map of their environment in real-
time. Among them, three main categories can be dis-
tinguished:
1. Sparse map generation methods (Visual-SLAM
(Cvi
ˇ
si
´
c et al., 2017; Cvi
ˇ
si
´
c and Petrovi
´
c, 2015));
2. Semi-dense map generation methods, (LSD-
SLAM or ORB-SLAM (Engel et al., 2014; Mur-
Artal et al., ));
3. Dense map generation methods (StereoScan (Gei-
ger et al., 2011)).
Among the several stereo datasets that have been
created for training and evaluating stereo algorithms,
only a few of them are commonly used. Middle-
bury stereo dataset (Baker et al., 2011) is widely used
for indoor scenes; it provides high-resolution stereo
pairs with dense disparity ground truth. However it
does not offer any data usable for SLAM algorithms,
as all the given images are totally independent. The
KITTI stereo dataset (Geiger et al., 2012) is a bench-
mark consisting of urban video sequences with semi-
dense disparity ground truth along with semantic la-
bels. The EuRoC MAV dataset (Burri et al., 2016)
presents two visual-inertial datasets containing stereo
images collected on-board on a Micro Aerial Vehicle
(MAV).
Because of the complex equipment and expensive
human ressource required to build them, these three
real-world datasets have relatively small sizes: for in-
stance, the largest one, the KITTI dataset, has only
aounrd 400 labelled stereo pairs in total for public use.
Another disadvantage of real-world datasets is the li-
mited precision of 3D sensors and LIDAR that pro-
hibits high-quality ground truth. Finally, because of
physical limitations of acquisition and recording, the
frame rates of these datasets are relatively low (around
10 frames per second) compared to actual cameras.
This was a major drawback to evaluate our adaptive
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time Dense 3D Reconstruction
841

SLAM proof of concept. Additionally, with the re-
cent interest in deep convolutional neural networks to
resolve the SLAM problem, the actual amount of data
is unsatisfactory for those greedy methods.
For all the reasons described above, the need for
synthetic stereo datasets arose. Virtual KITTI (Gai-
don et al., ) offers a dataset automatically label-
led with accurate ground truth for object detection,
tracking, scene and instance segmentation, depth
acquired by LiDAR, and optical flow. They unfortu-
nately do not allow users to extract any stereo data,
making it strongly powerful for monocular SLAM
method, but irrelevant for our context. On the other
hand, Unreal stereo (Zhang et al., ) and (Mayer et al.,
) offer a real answer to synthetic stereo data genera-
tion. However, none of them provides any consecu-
tive frame, and they are thus ineffective to achieve
SLAM. Our dataset is therefore, to our knowledge,
the only synthetic stereo dataset that could be used
for SLAM algorithms.
3 ADAPTIVE SLAM
METHODOLOGY
This section presents the adaptive SLAM method that
we have created and its integration in the pipeline for
3D dense reconstruction.
3.1 SLAM Optimization
As shown in the previous section, actual slam met-
hods are mostly based on consecutive pairwise analy-
sis, what means that they directly rely on the camera
frame rate. Let us consider an image sequence com-
posed of frames f
0
, f
1
,..., f
n
. We will note f
i
the i
th
frame. The objective of a SLAM algorithm is to find
the transformation matrix M (rotation and translation)
that allows a vector to go from f
i
to f
i+1
:
M =
r
11
r
12
r
13
t
x
r
21
r
22
r
23
t
y
r
31
r
32
r
33
t
z
0 0 0 1
=
R T
0 0 0
1
With r
ab
the rotation coefficients, t
a
the translation
coefficients o the corresponding axis. R and T are thus
respectively the Rotation and Translation matrix. We
can derive from the R matrix the rotation angle in each
dimension r
x
,r
y
,r
z
. The role of a SLAM algorithm is
to estimate these matrices so that:
f
i+1
= R × f
i
+ T
With f
i
the set of feature points extracted for the
i
th
frame. In order to ensure the highest possible preci-
sion, recent methods include every frame in the pro-
cess. Indeed, minimizing the distance between two
consecutive frames reduces the matrix estimation er-
ror. Moreover, the feature selection process from two
close frames ensure a large number of matching land-
marks, which is suitable for a robust path estimation.
However, such a computation is both time and po-
wer consuming. With the advent of embedded sys-
tems such as mobile phones or small unmanned vehi-
cles, autonomy became a strong parameter to take into
consideration for SLAM applications, in addition to
real-time process requirements. It is thus unthinkable
to deal with a 30 fps frame rate within an on-board
system still fulfilling all the requirements. To make
things possible, the frame rates are strongly reduced,
compared to standard acquisition devices, ineluctably
incorporating biases in the process.
It is a known fact that rotations are the actual rea-
son why SLAM is still an actively searched problem
(Carlone et al., ; Pirchheim et al., ). Rotation esti-
mation (a.k.a. rotation averaging) has been widely
studied in computer vision, where accurate camera
orientation estimation is critical to solve Bundle Ad-
justment in Structure from Motion. It has also been
investigated in the control theory community, where it
has applications for vehicle coordination, sensor net-
works localization, camera network calibration and
more broadly in robotic science. The idea that we
suggest is thus to reduce the number of frames pro-
cessed while the trajectory remains straight, in order
to reduce power consumption to increase processing
speed, and to measure the frame rate when the robot
is carrying out a rotation. Instead of considering the
whole set of images, we only consider a subset of it as
long as the trajectory stays straight. Let σ be the num-
ber of skipped frames and ε a minimum rotation angle
threshold. If at the i
th
frame the detected rotation an-
gle is above the threshold, we process the subset f
i−σ
to f
i
back into the SLAM algorithm. Doing so, we
strongly reduce the total number of processed frame
still minimising the critical errors in the dangerous ro-
tation parts. The pseudo-code of this simple process
is available on figure 1.
With this method, two parameters have to be con-
sidered: the number of skipped frames σ and the ro-
tation threshold ε. These two factors are strongly de-
pendent on the original frame rate of the sensor, the
current speed of the vehicle when turning. So to avoid
the laborious task of parameters adjustment, we have
developed an adaptive method the role of which is
to continuously adjust σ and ε during the exploration
process.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
842

Algorithm 1: Adaptive SLAM frame selection pseudo code.
1: procedure ADAPTIVESLAM
2: i ← 0
3: σ ← 1
4: while i < n do:
5: (r
x
,r
y
,r
z
,t
x
,t
y
,t
z
) ←
computeSLAM( f
i−σ
, f
i
)
6: if r
x
> ε or r
y
> ε or r
z
> ε then
7: for j ← [i − σ + 1,i] do:
8: (r
x
,r
y
,r
z
,t
x
,t
y
,t
z
) ←
computeSLAM( f
j−1
, f
j
)
9: save(r
x
,r
y
,r
z
,t
x
,t
y
,t
z
)
10: σ ← 1
11: else
12: save(r
x
,r
y
,r
z
,t
x
,t
y
,t
z
)
13: σ ← σ + 1
14: i ← i + σ
As shown in figure 2 (a), a less energy consuming
frame rate is applied to most of the trajectory (black
dots) and our method re-samples to a higher frame
rate when a rotation occurs (red dots). The structure
of the trajectory is conserved, still a significant num-
ber of frames have been skipped. More information
about these numbers are given in the results section of
this paper (section 5). Figure 2 ((b)) illustrates the dif-
ferences between the estimation of the trajectory with
and without Adaptive SLAM with the same number
of processed frames.The blue doted line is the output
of SLAM algorithm with a naive reduced frame rate.
The black and red doted line is the output of Adap-
tiveSLAM algorithm with the same number of dots.
The green doted line corresponds to the ground truth
delivered by KITII. This example clearly emphasizes
the need for high frame rates in the rotation areas, and
its non necessity for straight lines.
(a) (b)
Figure 2: Illustration of Adaptive SLAM frame selection.
The black+red points represent the trajectory given by adap-
tive SLAM. We can easily see in (a) that the curves are pro-
cessed with a highest frame rate than the straight lines. (b)
illustrates in blue what would happen if we keep the redu-
ced frame rate for the entire sequence. The computed trajec-
tory strongly spreads off the represented ground truth (green
dots), whereas the adaptive SLAM remains very close to it.
This method allows us to quickly get a coarse es-
timation of the transformation between two selected
frames. In the next subsection, we will use the out-
Figure 3: Pipeline to generate a cloud of points from a ste-
reo image pair.
put of the adaptive SLAM algorithm to generate a 3D
dense reconstruction of the world surrounding the ca-
meras.
3.2 A Pipeline for 3D Dense
Reconstruction in Real-time
In this section we present a full pipeline for real-time
3D dense reconstruction from stereo visual odometry,
without any other sensors than our two calibrated ca-
meras.
The very first step of the pipeline consists in buil-
ding an initial point cloud at a time t on which the
other generated clouds will be grafted. To do so, we
preliminary have to calibrate the cameras. This step
is an essential requirement of the pipeline. This cali-
bration process will generate intrinsic parameters (fo-
cal length, distortion, principal points and axis skew)
and extrinsic parameters( baseline length, translation
and rotation matrices from a camera to the other). A
standard procedure to calibrate the camera is to use a
chessboard pattern. An average of significant num-
ber of different poses is used to get better calibra-
tion results. This calibration is a mandatory step for
the rectification process used to project the two ima-
ges onto a common image plane. We can then ap-
ply a stereo vision algorithm to build a disparity map.
We decided to compute our maps using an implemen-
tation of the so-called Semi-Global Block Matching
SGBM from (Hirschmuller, 2006). Using the previ-
ously computed calibration parameters, we can then
integrate the disparity map into a depth map. We can
eventually extract a point cloud from the depth map.
This process is illustrated in figure 3.
One of the main advantages of this method is that
the point cloud is generated directly from the image,
and every 3D point is associated to one pixel in the
image. This provides a quick method to build a dense
3D point cloud in real-time scenarios. A critical dra-
wback is that the quality of the generated cloud is
really sensitive to the calibration process. This step
should thus be done with great precision in order to
limit noise generation, but this is out of the scope of
this paper. Once the initial point cloud has been gene-
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time Dense 3D Reconstruction
843

rated, we apply the proposed adaptive SLAM method
to the input images sequence. From the trajectory es-
timation, we then extract a key frame and compute its
corresponding point cloud. the key frame is selected
when a displacement threshold has been reached. Af-
ter a filtering step, the transformation matrix estima-
ted by the adaptive SLAM algorithm is applied to the
new point cloud and merged within the global cloud,
giving suitable estimation. Then, in order to minimize
the difference between the global point cloud and the
new one, an Iterative Closest Point (ICP) algorithm
(Chetverikov et al., ) is run to refine the final registra-
tion. This step is done simultaneously with the adap-
tive SLAM algorithm so it does not slow down the
global pipeline (figure 4). Results will be presented
in section 5.
4 ALASTOR DATASET
As shown in the related work section, only a few data-
sets exist for stereo vision based odometry. And even
then, the volume of data they provide remains limi-
ted due to the hard task of collecting such data in a
real-world scenario (Geiger et al., 2012; Baker et al.,
2011; Burri et al., 2016). Moreover, existing synthe-
tic datasets are ineffective for stereo (Gaidon et al., )
or SLAM (Zhang et al., ; Mayer et al., ) scenarios.
As the first one only provides images from mono ca-
mera, and the second does not provide any images
sequence mandatory to apply SLAM algorithms. The
second main contribution of this article is thus to of-
fer the first, to our knowledge, synthetic stereo dataset
for SLAM algorithms.
To generate such a dataset, several solutions ex-
ist in the literature. The Modular OpenRobots Simu-
lation Engine (MORSE) (Echeverria et al., ) seemed
to fulfill most of the needed requirements to perform
our simulation. MORSE is an open-source software
which offers an extended set of predefined sensors
and controllers that cover reasonably well common
simulation needs. Nevertheless, even though the ca-
mera physics were ideal for our needs, the vector ma-
nipulation lacked of realism. We thus decided to im-
plement our own solution using Unity 3D
1
, a power-
ful cross-platform engine we are familiar with. Still,
we should give a closer look to MORSE in our future
works.
We developed a solution which allows users to
load any 3D environment model (forest, city, road,
etc.) and to insert one or several vectors (car, UAV,
boat, person, etc.) equipped with a stereo acquisition
1
Unity 3D Engine: https://unity3d.com/
system. The simulation lets the user play with a large
number of parameters (resolution, baseline, Field of
View, baseline, FPS). Then, with a regular game con-
troller, the user simply wanders inside its 3D scene
(see figure 1), letting the simulation capture the stereo
images and record the ground truth trajectory. The ge-
nerated dataset can then be downloaded and given as
input to any SLAM algorithm, with a perfect ground
truth to compare with. As shown in figure 5 (a), the
simulation also enables the user to generate a calibra-
tion scene.
The synthetic datasets that we generated offer the
following advantages:
1. Perfect ground truth.
2. Complete vehicle parametrization (dimensions,
speed, turning angle, ability to fly).
3. Full acquisition system parametrization (resolu-
tion, frame rate, baseline).
4. Multi-scale and multi-scene adaptability.
The figure 5 shows an example of a 3D model of
a city used in the Alastor simulation. The full data-
set is available on-line at http://alastor.labri.fr/ The fi-
gure 6 represents 10 simulated drives, from very sim-
ple straight trajectories to more complex scenarios.
Our architecture makes it possible to easily tune
acquisition parameters. We have included a rain simu-
lator to deal with noisy particles as well as a daylight
manipulation tool allowing to work with illumination
changes. An output example is given in fig. 7 (a,b).
To go even further, a rotary LiDAR has been ad-
ded in the simulation, as shown in fig. 8. Once more,
as the datasets are fully synthetic, the precision of the
generated cloud of points is strongly higher than a real
sensor subject to real-life acquisition noise.
5 RESULTS
In order to evaluate our model, we tested the propo-
sed adaptive SLAM algorithm on the so-called KITTI
dataset (Geiger et al., 2012) and on the Alastor data-
set. The SLAM algorithm on top of which is imple-
mented the Adaptive SLAM algorithm is generated
by libviso2 (Geiger, 2012), an open source library for
stereo visual odometry. The goal of the following re-
sults is to demonstrate that the same results are achie-
vable with less resources. We do not focus on pre-
cision improvement here. The following results will
consider the computed trajectory given by libviso2 as
the ground truth for our adaptive SLAM estimation.
Thanks to the Alastor dataset, our results are obtained
on a high frame rate (50fps) for all the synthetic data,
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
844

Figure 4: Pipeline of global 3D dense reconstruction.
(a) (b)
Figure 5: Alastor simulation example scenes. (a) Example
of the calibration scene used to compute the intrinsic and
extrinsic parameters of the stereo cameras. (b) Example of
a 3D model used as the global scene in Alastor simulation.
whereas the KITTI dataset was used at its maximum
of 10 fps.
We used two main metrics to evaluate the perfor-
mances of our method: the first one is the time saved
between libviso2 SLAM and our adaptive SLAM ex-
pressed in seconds. The evaluation have been run on
a i7-4770 CPU with 16Go of RAM. The second me-
trics is the error ∆ generated by our adaptive SLAM.
The error represents the average error with respect to
the total travelled distance (as a percentage):
∆ =
∑
n
i=0
p
(x
i
− x
0
i
)
2
+ (y
i
− y
0
i
)
2
+ (z
i
− z
0
i
)
2
/n
∑
n
j=1
p
(x
j
− x
j−1
)
2
+ (y
j
− y
j−1
)
2
+ (z
j
− z
j−1
)
2
where n is the total number of processed frames, x,y,z
are the 3D coordinates given by libviso2 for a given
frame i. x
0
,y
0
,z
0
are the 3D coordinates given by the
Adaptive SLAM for the same frame. We first tested
our algorithm on the KITTI Dataset.
5.1 Evaluation based on the KITTI
Dataset
Due to the frame rate used in the KITTI datasets, we
set the parameters to ε = 0.01 and σ
max
= 4. This way,
we ensure a low frame rate at 2,5 fps with a maximum
speed of the vehicle at 30 km/h. The results using the
KITTI dataset are illustrated on an histogram figure
9. The black bar corresponds to the execution time of
the SLAM algorithm of libViso2. The blue one corre-
sponds to the execution time of the Adaptive SLAM
algorithm. As it can be seen on the histogram, the er-
ror rate is very low (the highest error is 0.34%) with
saved time of 32.8% on average. These values repre-
sent considerable gains for embedded systems.
5.2 Evaluation based on the Alastor
Dataset
On the basis of the results on the KITTI dataset,
we then tested the Adaptive SLAM algorithm on the
Alastor dataset. Due to the used frame rate in the
simulation, we set our parameters to ε = 0.01 and
σ
max
= 10. This way, we ensure a low frame rate at 5
fps with a maximum vehicle speed of 60 km/h. The
number of skipped frames and the corresponding er-
ror are displayed on figure 10. The average saved time
is 73.8%. This good result is due to the original frame
rate of the simulation. In the other hand, the max-
imum generated error reached 1.75% for the dataset
number 00. This is mainly due to a bad estimation of
the elevation close to the first frames.
Tested on a i7-4770 computer with 16Go of RAM,
a regular dataset of 1000 frames with a resolution of
1392 x 512 pixels (similar to KITTI (Geiger et al.,
2012)) takes around 420s (7 minutes) with libviso2
raw algorithm. Three scenarios can be considered
with our Adaptive SLAM algorithm:
1. Worst Case Scenario: The trajectory is entirely
composed of rotations: no single frame is skipped,
the computation time thus remains thus the same
(7 minutes).
2. Regular Case: The trajectory is composed of ro-
tations and straight lines. In average, the execu-
tion time is shorten by 30%. The whole SLAM
generation takes 4 minutes and 54s.
3. Optimal Case: The trajectory is a single straight
line. The percentage of skipped frames is in this
case is around 90%. The execution time is 42 se-
conds. This situation occurs, for instance, in one
of the KITTI datasets see figure 11.
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time Dense 3D Reconstruction
845
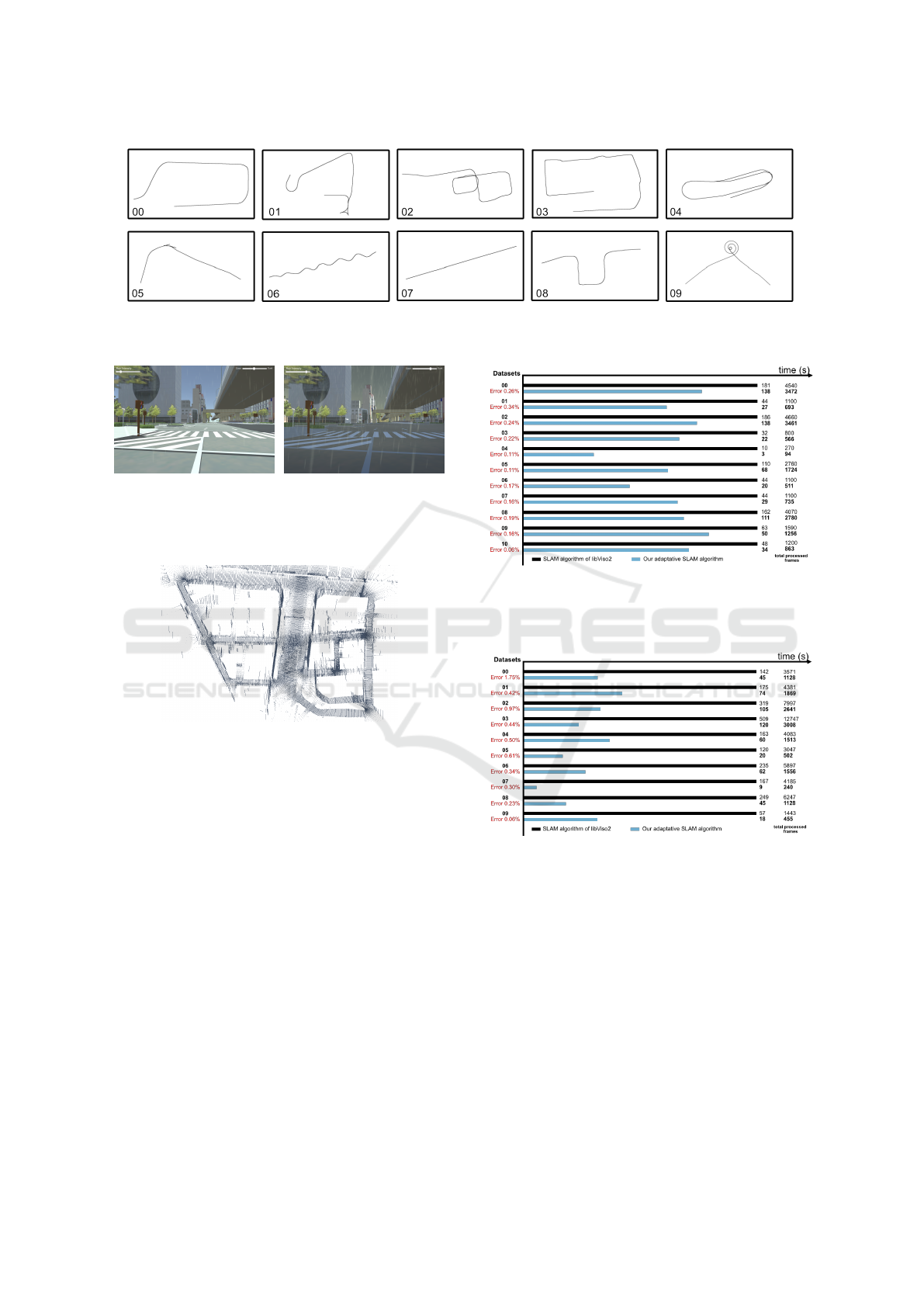
Figure 6: Some simulated trajectories available in the Alastor dataset. These 10 datasets correspond to scenarios with different
complexity levels. The results of the adaptive SLAM algorithm on these datasets are shown in the next section.
(a) (b)
Figure 7: Alastor simulation engine outputs. With diffe-
rent weather and lighting conditions: (a) Simulation during
daylight with light rain, (b) during dawn with strong rain.
Figure 8: Example of a cloud of point generated by the ro-
tary LiDAR. Thanks to the synthetic nature of the datasets,
its reliability is very high.
To ensure the stability of the Adaptive algorithm,
it was tested on more complex scenarios. For instance
one of the biggest datasets available in KITTI. The
corresponding trajectory is shown on figure 12 (a).
This examples highlights the efficiency of the frame
selection process. Indeed, most of the straight parts
are sparse (black dots) whereas the rotation parts are
more dense (red dots). This phenomenon is even more
noticeable in the simulated spinning trajectory of fi-
gure 12 (b). This dataset clearly put forward the pro-
cess of the adaptive frame selection.
The Adaptive SLAM computes a coarse estima-
tion of the movements of the camera from one frame
to an other. The final merge between the current
point cloud and the previously computed global one
is consistent. With a precise enough initialization,
ICP (Chetverikov et al., ) algorithm perfectly mer-
ges the input clouds. As no ground truth exists for
such a dense generated cloud, this observation may
Figure 9: Evaluation of adaptive SLAM algorithm compa-
red to libviso2 on the KITTI dataset. This array clearly
highlights the saved computational time on real data. It also
confirms that the error is negligible in comparison.
Figure 10: Evaluation of adaptive SLAM algorithm compa-
red to libviso2 on the Alastor dataset. The gain is here even
more impressive.
only be made subjectively. As displayed in figure 13,
the trajectory (in red) fits perfectly the generated point
cloud. A zoom inside it allows us to observe more
closely the efficiency of the registration.
In order to ease the estimation of the readers, two
videos are provided with this paper as supplemental
materials, one for each generated point cloud.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
846

Figure 11: Illustration of the number of skipped frame. The two lines represent the same trajectory. The upper one is given
by libviso2 whereas the lower one is generated by adaptive SLAM. This trajectory is extracted from a real KITTI sequence.
Figure 12: Comparison between the output of our adaptive
SLAM algorithm and the ground truth of one of the KITTI
datasets. Yellow lines correspond to the perfect ground truth
computed during the simulation. Black and red dots are the
adaptive SLAM output.
6 CONCLUSION
In this paper, we have presented an optimization of
SLAM algorithms that reduces the number of proces-
sed frames without increasing the resulting error. We
have shown that this method significantly increases
performances in real-time scenarios, and that it is ap-
plicable to well known datasets. We used Adaptive
SLAM algorithm within a 3D dense reconstruction
pipeline and we have shown that the results are per-
fectly suitable for dense reconstruction. Additionnaly,
to support the validation of our concept and to answer
the needs for stereo datasets for SLAM evaluation,
we made available, what is to our knowledge, the first
synthetic stereo dataset for SLAM applications: Alas-
tor. The experiments that we have conducted have
shown that adaptive SLAM performs great on simula-
ted datasets. We hope that our dataset will help design
and evaluate innovative methods that will take advan-
tage of the tunable parameters in order to improve the
effectiveness of SLAM solving algorithms in the fu-
ture.
In terms of future work, we are also considering
the integration of loop-closure algorithm in the recon-
struction pipeline. This problem consists in detecting
when the robot has returned to a past location after
having discovered new terrain for a while. Such met-
hods are able to greatly reduce the accumulated error
by adjusting the generated cloud once a loop has been
noticed. We also intend to improve the Alastor dataset
by diversifying both its content and the sensors.
(a)
(b)
Figure 13: 3D dense reconstruction based on the KITTI da-
taset. (a) Full 3D dense point cloud generated using the
KITTI dataset. The red points show the trajectory compu-
ter by our adaptive SLAM. (b) Zoom inside the aside point
cloud. Here, several depth maps have been merged to create
a unique cloud.
(a) (b)
Figure 14: 3D dense reconstruction of Alastor dataset. (a) is
a fully merged 3D dense point cloud generated from Alastor
dataset overflight by drones. (b) is the Same point cloud
but from an other point of view. The overlapping areas are
totally invisible thanks to ICP (Chetverikov et al., ).
REFERENCES
Baker, S., Scharstein, D., Lewis, J. P., Roth, S., Black,
M. J., Szeliski, R., Baker, S., Szeliski, ·. R., Szeliski,
R., Scharstein, D., Roth, S., and Black, M. J. (2011).
A Database and Evaluation Methodology for Optical
Flow. Int J Comput Vis, 92:1–31.
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J.,
Omari, S., Achtelik, M. W., and Siegwart, R. (2016).
The EuRoC micro aerial vehicle datasets. The Inter-
Adaptive SLAM with Synthetic Stereo Dataset Generation for Real-time Dense 3D Reconstruction
847

national Journal of Robotics Research, 35(10):1157–
1163.
Caballero, F., Merino, L., Ferruz, J., And, A. O. J. o. I., and
2009. Vision-based odometry and SLAM for medium
and high altitude flying UAVs. Springer.
Carlone, L., Tron, R., Daniilidis, K., and Dellaert, F. Initia-
lization Techniques for 3D SLAM: a Survey on Rota-
tion Estimation and its Use in Pose Graph Optimiza-
tion.
Chetverikov, D., Svirko, D., Recognition, D. S. P., and
2002. The trimmed iterative closest point algorithm.
ieeexplore.ieee.org.
Cvi
ˇ
si
´
c, I.,
´
Cesi
´
c, J., Markovi
´
c, I., and Petrovi
´
c, I. (2017).
SOFT-SLAM: Computationally Efficient Stereo Vi-
sual SLAM for Autonomous UAVs. Journal of field
robotics.
Cvi
ˇ
si
´
c, I. and Petrovi
´
c, I. (2015). Stereo odometry based on
careful feature selection and tracking. In Mobile Ro-
bots (ECMR), 2015 European Conference on, pages
1–6. IEEE.
Echeverria, G., Lassabe, N., Robotics, A. D., Automation,
and 2011. Modular open robots simulation engine:
Morse. Citeseer.
Engel, J., Sch
¨
ops, T., and Cremers, D. (2014). LSD-SLAM:
Large-Scale Direct Monocular SLAM. pages 834–
849.
Engel, J., St
¨
uckler, J., , Systems, D. C. I. R., and 2015.
Large-scale direct SLAM with stereo cameras. ieeex-
plore.ieee.org.
Gaidon, A., Wang, Q., Cabon, Y., and Vig, E. Virtual Wor-
lds as Proxy for Multi-Object Tracking Analysis.
Geiger, A. (2012). Libviso2: C++ library for visual odome-
try 2, www.cvlibs.net/software/libviso/.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we re-
ady for autonomous driving? the kitti vision bench-
mark suite. In Computer Vision and Pattern Recogni-
tion (CVPR), 2012 IEEE Conference on, pages 3354–
3361. IEEE.
Geiger, A., Ziegler, J., and Stiller, C. (2011). Stereoscan:
Dense 3d reconstruction in real-time. In Intelligent
Vehicles Symposium (IV), 2011 IEEE, pages 963–968.
Ieee.
Hirschmuller, H. (2006). Stereo vision in structured en-
vironments by consistent semi-global matching. In
Computer Vision and Pattern Recognition, 2006 IEEE
Computer Society Conference on, volume 2, pages
2386–2393. IEEE.
Howard, A. (2008). Real-time stereo visual odometry for
autonomous ground vehicles. In Intelligent Robots
and Systems, 2008. IROS 2008. IEEE/RSJ Internati-
onal Conference on, pages 3946–3952. IEEE.
Kaess, M., Ni, K., , Automation, F. D. R., 2009, and 2009.
Flow separation for fast and robust stereo odometry.
ieeexplore.ieee.org.
Karlsson, R., Schon, T., Aerospace, D. T., and 2008. Uti-
lizing model structure for efficient simultaneous loca-
lization and mapping for a UAV application. ieeex-
plore.ieee.org.
Kitt, B., Geiger, A., and Lategahn, H. (2010). Visual odo-
metry based on stereo image sequences with ransac-
based outlier rejection scheme. In Intelligent Vehicles
Symposium (IV), 2010 IEEE, pages 486–492. IEEE.
Kuschk, G., Bozic, A., and Cremers, D. (2017). Real-time
variational stereo reconstruction with applications to
large-scale dense SLAM. In 2017 IEEE Intelligent
Vehicles Symposium (IV), pages 1348–1355. IEEE.
Lategahn, H., Geiger, A., (ICRA), B. K. R., Automation,
and 2011. Visual SLAM for autonomous ground vehi-
cles. ieeexplore.ieee.org.
Mayer, N., Ilg, E., H
¨
ausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. A Large Dataset to Train
Convolutional Networks for Disparity, Optical Flow,
and Scene Flow Estimation.
Mur-Artal, R., on JMM Montiel IEEE Transactions, and
2015. ORB-SLAM: a versatile and accurate mono-
cular SLAM system. ieeexplore.ieee.org.
Pirchheim, C., Mixed, D. S., Augmented, and 2013. Hand-
ling pure camera rotation in keyframe-based SLAM.
ieeexplore.ieee.org.
Pire, T., Baravalle, R., D’Alessandro, A., and Civera, J.
(2018). Real-time dense map fusion for stereo SLAM.
Robotica, pages 1–17.
Sanfourche, M., , Robots, V. V. I., and 2013. evo: A real-
time embedded stereo odometry for mav applications.
ieeexplore.ieee.org.
Tanner, M., Pini
´
es, P., Paz, L. M., and Newman, P. DEN-
SER Cities: A System for Dense Efficient Recon-
structions of Cities.
Zhang, Y., Qiu, W., Chen, Q., Hu, X., arXiv preprint
ArXiv:1612.04647, A. Y., and 2016. Unrealste-
reo: A synthetic dataset for analyzing stereo vision.
arxiv.org.
Zhu, J. (2017). Image Gradient-based Joint Direct Visual
Odometry for Stereo Camera. In Int. Jt. Conf. Artif.
Intell, pages 4558–4564.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
848
