
Context-aware Training Image Synthesis for Traffic Sign Recognition
Akira Sekizawa and Katsuto Nakajima
Department of Information Systems and Multimedia Design, Tokyo Denki University, Tokyo, Japan
Keywords:
Traffic Sign Recognition, Object Detection, Synthetic Data, Data Augmentation.
Abstract:
In this paper, we propose a method for training traffic sign detectors without using actual images of the traffic
signs. The method involves using training images of road scenes that were synthetically generated to train
a deep-learning based end-to-end traffic sign detector (which includes detection and classification). Conven-
tional methods for generating training data mostly focus only on producing small images of the traffic sign
alone and cannot be used for generating images for training end-to-end traffic sign detectors, which use im-
ages of the overall scenes as the training data. In this paper, we propose a method for synthetically generating
road scenes to use as the training data for end-to-end traffic sign detectors. We also show that considering the
context information of the surroundings of the traffic signs when generating scenes is effective for improving
the precision.
1 INTRODUCTION
To implement advanced driver assistance systems and
achieve fully autonomous driving, researchers are ac-
tively working on object recognition technology for
recognizing humans and the objects surrounding ve-
hicles. Sensors that are used for object recognition
include RGB cameras, millimeter-wave radar, and Li-
DAR (laser radar). For example, LiDAR is effective
for detecting humans with high accuracy. In contrast,
RGB cameras are necessary for recognizing traffic
signs because the system must be able to read reg-
ulations printed on the surfaces of the signs. In the
field of image recognition by RGB cameras, end-to-
end object recognition methods based on deep learn-
ing approaches have made it possible to recognize ob-
jects with high precision and speed. However, it is
necessary to collect large amounts of diverse training
data when using end-to-end object recognition meth-
ods compared with using conventional methods.
Methods for collecting training data can be classi-
fied into the following three categories: methods that
use publicly available datasets, methods that involve
manually collecting new data, and methods that in-
volve synthesizing new data. For traffic sign recogni-
tion, it is possible to use published datasets in only a
few situations. Because traffic sign standards are dif-
ferent in each country, traffic sign datasets from one
country cannot be used for training traffic sign recog-
nition systems in another country. Furthermore, man-
ual collection of traffic sign images is an extremely
time-consuming process. For example, even if the
consideration is limited to only a set of regulatory
signs from all classes of traffic signs in Japan, there
are still over 60 classes of signs. Furthermore, be-
cause there is bias in the locations where each class
of sign is installed, it would be extremely expensive
to travel to the locations where each traffic sign is in-
stalled to photograph them. Alternatively, it is pos-
sible to collect images of the signs from the internet
instead of photographing them on-site. However, it is
difficult to use the internet to collect traffic sign im-
ages that are not installed in many places.
Researchers are studying methods for synthesiz-
ing data as a third method of collecting training data.
Synthetic generation of training data for traffic sign
recognition is advantageous because it reduces the
cost of collecting data and makes it possible to gen-
erate traffic sign datasets for any given country. A
method for generating images of single traffic signs
was first proposed by Ishida et al. in 2006 (Ishida
et al., 2006). Their method used with realistic degra-
dation involving application of various degradation
models such as blur and rotation to the template im-
ages of the traffic signs. Subsequently, several other
methods have also been proposed (Hoessler et al.,
2007; Medici et al., 2008; Møgelmose et al., 2012;
Moiseev et al., 2013; Haselhoff et al., 2017). In
contrast, research on methods for generating images
of the overall scenes that include traffic signs could
not be found. In several previous research projects,
researchers performed data augmentation to increase
466
Sekizawa, A. and Nakajima, K.
Context-aware Training Image Synthesis for Traffic Sign Recognition.
DOI: 10.5220/0007387904660473
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 466-473
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the number of images in the datasets by pasting syn-
thesized images of the traffic signs on the existing
background images (Zhu et al., 2016; Peng et al.,
2017; Urˇsiˇc et al., 2017). These previous research
projects did not evaluate the precision of the traffic
sign recognition model trained by only the syntheti-
cally generated traffic sign images. They also did not
investigate methods for improving the traffic sign im-
age synthesis method itself.
In this paper, we make two contributions. Our first
contribution is to propose a novel method for synthet-
ically generating the training data for an end-to-end
traffic sign detector. Our proposed method synthe-
sizes the traffic signs at the locations where they are
supposed to be when pasting them on the background
images by focusing on the context of the surroundings
of an object, that end-to-end object detectors would
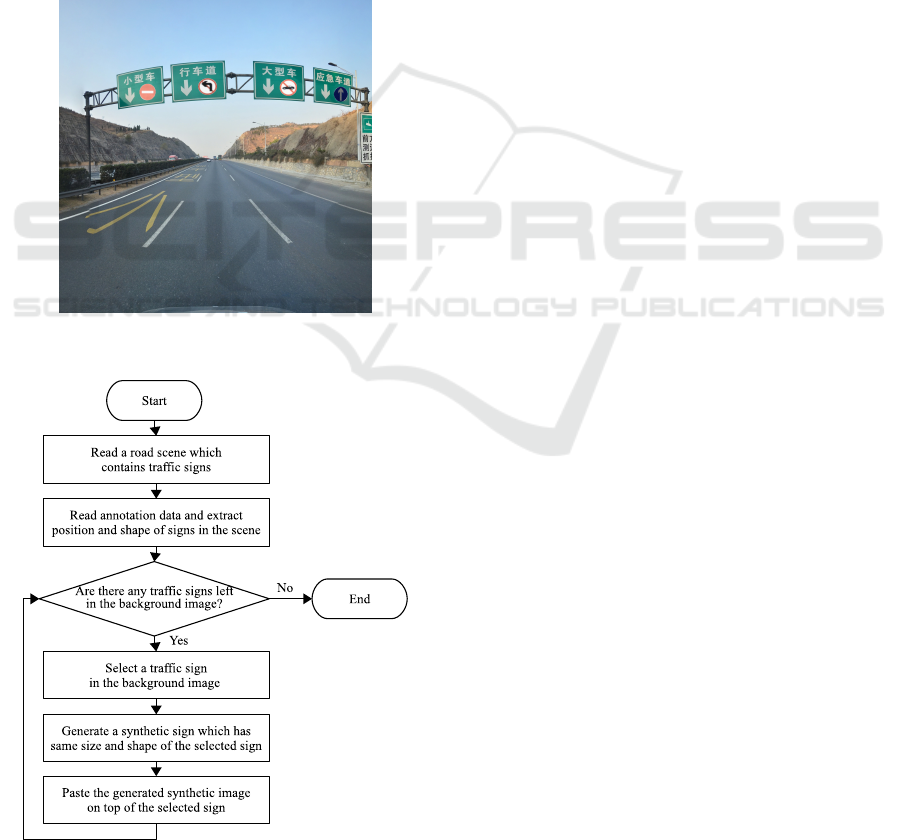
be expected to use. An example of an image of a road
scene generated using the proposed method is shown
in Figure 1. The proposed method uses only pub-
lished traffic sign datasets and traffic sign pictograms
to generate the training data. Therefore, it is unneces-
sary to manually collect new data. Our second contri-
bution is the evaluation of the precision of the models
that are trained using only the synthesized data. Al-
though there have been some reports on the precision
of the systems trained on a mix of synthetically gen-
erated and manually collected road scenes do exist,
studies regarding the precision when the systems are
trained on synthesized data alone are not known.
Figure 1: Road scene generated using the proposed method.
2 RELATED WORKS
2.1 Synthetic Image Generation of
Single Traffic Signs
Images of single traffic signs are used as the train-
ing data for pure traffic sign classifiers. The main
method for synthetically generating images of single
traffic signs is a degradation model. In this method,
degraded images are generated by applying functions
(degradation models) that express the degradation
such as a rotation, a blur, or a translation to an ideal
template image of a traffic sign. A diverse set of syn-
thetic images is generated by varying the parameters
of the degradation model. Generation of training data
using degradation models was first proposed by Baird
for application to the task of optical character recog-
nition (OCR) for optically scanned documents (Baird,
1992). Ishida et al. proposed a degradation model for
traffic sign recognition with three parameters, namely,
rotation, blur, and translation (Ishida et al., 2006).
Ishida et al. also proposed a method for adaptively
determining the values of the degradation parame-
ters using a genetic algorithm (Ishida et al., 2007).
Which were manually determined based on experi-
ence. Møgelmose et al. suggested a degradation
model for traffic sign recognition that included six
parameters, namely, hue change, luminosity change,
rotation, Gaussian blur, Gaussian noise, and occlu-
sion (Møgelmose et al., 2012). Moiseev et al. pro-
posed a degradation model that included hue change,
saturation change, three-dimensional rotation, projec-
tive transformation, Gaussian blur, translation, scal-
ing, and Gaussian noise (Moiseev et al., 2013). Clas-
sifiers that were trained using the degradation model
proposed by Moiseev et al. achieved precision that
were higher than those of the classifiers trained using
real images in the traffic sign recognition benchmark
for German traffic signs (GTSRB) (Stallkamp et al.,
2012).
Another method for generating realistic synthetic
images transfers the degradation of an actual image
to a synthesized image. Haselhoff et al. proposed a
method for generating synthetic traffic signs by trans-
ferring the features of the appearance of the real traffic
signs to other synthetic traffic signs using a Markov
random field (Haselhoff et al., 2017). In Haselhoff’s
method, the traffic sign classes of the transfer source
can be different from the classes of the destination.
Therefore, it is possible to use this method to synthet-
ically generate images of the traffic signs from one
country to another country.
2.2 Synthetic Image Generation of
Overall Scenes that Include Traffic
Signs
Images of the road scenes that include traffic signs are
used as the training data for the end-to-end object de-
tectors. To the best of our knowledge, research that
directly investigates the synthetic generation of road
Context-aware Training Image Synthesis for Traffic Sign Recognition
467

scenes for traffic sign detection is not yet reported.
There are several instances of previous work in which
the researchers have generated road scenes that in-
clude traffic signs as a part of a data augmentation
process.
Zhu et al. generated road scenes by pasting syn-
thetic traffic signs that were generated using a degra-
dation model on background images at random lo-
cations (Zhu et al., 2016). Zhu’s degradation model
included rotation within the range from -20
o
to 20
o
,
scaling within the range of 20 pixels to 200 pixels,
projective transformation within the range that was
appropriate for traffic signs, and random noise. Zhu
et al. combined the synthetically generated scene im-
ages with manually collected scene images and used
them for training.
Peng et al. generated scene images by extracting
the images of single traffic signs from existing traffic
sign datasets and pasting them on background images
at random locations (Peng et al., 2017). In Peng’s
method, actual images were used for both the traf-
fic sign images and background images. Peng et al.
extracted the images of single traffic signs from the
GTSRB dataset (Stallkamp et al., 2012) and used the
KITTI Road/Lane Detection Evaluation 2013 dataset
(Fritsch et al., 2013) for the background images.
Note that the researchers did not apply any additional
degradation or deformation to the traffic sign images
when pasting them on background images.
Urˇsic et al. pasted both the synthetically generated
traffic signsand actual trafficsigns on backgroundim-
ages at random locations (Urˇsiˇc et al., 2017). Urˇsic
et al. applied deformations due to affine transforma-
tions and scaling transformations to both the syntheti-
cally generated images and actual images of the traffic
signs, changed their luminosity and contrast, and ap-
plied motion blur and shadow. In addition, Urˇsic et
al. proposed to avoid pasting traffic sign images in
the center of the background image. The center of the
background image is normally occupied by the road,
and it is very rare for a traffic sign to be located in this
part of the image.
The goal of these research projects was data aug-
mentation. The researchers trained their models by
using both collected scene images and synthetically
generated scene images simultaneously. There have
been no reports of studies in which training was per-
formed using synthetically generated scene images
alone. Furthermore, these studies did not focus on
improving the methods for synthetically generating
scene images either.
3 PROPOSED METHOD
In this section, we describe a method for syntheti-
cally generating images of scenes that include traffic
signs to serve as the training data for end-to-end traffic
sign detectors. Our preliminary experiments showed
that the precision of the traffic sign detector that were
trained using Zhu et al’s method, in which synthet-
ically generated traffic signs were pasted at random
locations (Zhu et al., 2016) (hereinafter referred to as
the random method), had a mAP that was approxi-
mately 10% lower than that of the detectors that were
trained using actual training images. An example of
a road scene that was generated using the random
method is shown in Figure 2. The procedure flow is
shown in Figure 3.
Figure 2: Example of a road scene generated using the ran-
dom method.
Figure 3: Flowchart of the random method.
Although the random method exhibits a high ren-
dering quality for generating single traffic signs, the
locations where the signs are pasted and sizes of the
signs are random. Therefore, the traffic signs are
pasted at locations where the traffic signs are not sup-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
468
posed to exist, such as floating in the air or on center
of the road. Our hypothesis for the reason why im-
ages generated using random method yield a low per-
formance is that the context information of the sur-
roundings of the traffic sign is lost in the generated
scene images. End-to-end object detectors use the
context information from the surroundings of an ob-
ject to detect and classify objects. Therefore, using
scene images in which the context information is de-
stroyed will have a negative effect on the training.
In our proposed method, we generate training data
by pasting traffic signs at locations at which the traffic
signs were originally located in the scene. An exam-
ple of a generated scene using our proposed method is
displayed in Figure 4. The procedure flow is depicted
in Figure 5.
Figure 4: Example of a road scene generated using the pro-
posed method.
Figure 5: Flowchart of the proposed method.
To obtain the locations at which traffic signs ex-
ist within the scenes, we used published traffic sign
datasets. Because these datasets included numerous
scenes that include traffic signs, we can use these im-
ages as the background images and paste syntheti-
cally generated traffic signs at overlapping locations
where the traffic signs is originally located. This
made it possible to synthetically generate scene im-
ages that preserved the context information surround-
ing the traffic signs.
3.1 Collection of Background Images
Our proposed method uses images of scenes that in-
clude traffic signs as background images. It is neces-
sary for the locations and shapes of the traffic signs to
be annotated earlier. It is possible to use a traffic sign
dataset from a country or region that is different from
the target country or region. This is because although
different countries may drive on different sides of the
road, the locations at which the traffic signs are in-
stalled and the methods for installing them are practi-
cally the same. In addition, because the traffic signs
are overwritten by the synthetically generated traffic
signs, the method is not affected by the differences in
the traffic signs between countries.
3.2 Generation of Single Traffic Signs
When generating images of single traffic signs, it is
necessary to consider the following four factors:
• Shape
• Size
• Rotation
• Degradation of appearance
In terms of the shape, it is necessary to choose a
traffic sign of a shape that can completely covers the
original trafficsign. For example, if a triangular traffic
sign is pasted on top of a traffic sign that is originally
circular, part of the original traffic sign will still be
visible, as shown in Figure 6. This would result in an
inappropriate context surrounding the sign.
Therefore, it is desirable for the original sign and
pasted sign to have the exact same shape. However,
some shapes, such as octagons, do not appear very
frequently, and the number of existing scene images
that include these signs is small. Therefore, it is desir-
able to allow exceptions, such as allowing octagonal
signs to be pasted on top of circular signs.
In our proposed method, we do not require the
classes of the original sign and pasted sign to match.
If we were to require the classes to match, then this
Context-aware Training Image Synthesis for Traffic Sign Recognition
469

Figure 6: Example of an image in which signs of different
shapes were pasted on an image.
would increase the constraints, and it would not be
possible to generate a sufficient number of diverse
scene images. In addition, because there is not much
difference between the context surrounding the signs
for the different classes of signs, there is not much
advantage in requiring the types to match. As for the
size, it is necessary to make the width and height of
the synthetically generated sign to match those of the
bounding rectangle of the original sign obtained based
on the annotations.
Regarding the rotation, it is desirable to calculate
the projective transformation matrix of the original
sign and apply the same projective transformation to
the synthetically generated sign. However, because it
is difficult to calculate the projective transformation
matrix of an original sign from an image, we use the
following method. First, because traffic signs are po-
sitioned perpendicular to the ground, we assume that
there is no rotation in the direction of the x-axis or
z-axis. To determine the rotation in the y-axis direc-
tion, we assume that it is possible to approximate the
deformation due to rotation in the y-axis direction by
aligning the widths and heights of the bounding boxes
of the original sign and pasted sign. An example of
a synthetic sign aligning only the widths and heights
is shown in Figure 7. The projective deformation of
the traffic signs that are far away and small can be
ignored. Therefore, it is possible to sufficiently deal
with the signs that have undergone projective trans-
formation simply by aligning the widths and heights
of the bounding rectangles, as we will demonstrate in
our evaluation later.
We processed the appearance of the signs to make
them resemble the actual images by using a degra-
dation model. Because our purpose is to paste the
synthetically generated signs within the scene, it is
desirable to consider whether the image matches
the brightness and sharpness of the background and
whether it looks realistic when determining the degra-
(a) Actual sign (b) Synthesized sign
Figure 7: Example of a synthetic image created by pasting
on top of a sign that has undergone a projective transforma-
tion.
dation to apply to the sign image. However, this topic
is left for future research. In this paper, random degra-
dation is applied.
4 EVALUATION
To evaluate the effect of road scene generation by con-
sidering the context, we trained an end-to-end object
detector,Faster R-CNN, using the followingthree sets
of training data:
1. Actual images
2. Synthesized images (proposed method)
3. Synthesized images (Zhu’s random method (Zhu
et al., 2016))
In this experiment, we used the Tsinghua–Tencent
100K traffic sign dataset (TT100K) (Zhu et al.,
2016). TT100K includes 16,811 road scene images of
2048×2048 pixels with annotations, each captured in
China. The dataset includes 6,103 images in the train-
ing set; 3,067 images in the test set; and 7,641 other
images (of which 6,544 are background images that
do not include traffic signs). In this experiment, we
use all images in the training set and test set. TT100K
includes total 182 classes of traffic signs. In addi-
tion, TT100K also includes template images for the
128 classes. In this experiment, we use 79 of classes.
A list of the traffic signs used in this experiment is
shown in Figure 8. This set of 79 classes is the inter-
section of the following two sets of classes.
• 151 traffic sign classes included in the training set
• 128 traffic sign classes for which a template image
has been provided
4.1 Generation of Training Data
In this experiment, we prepared three types of training
data, including actual images (Set 1), synthetic im-
ages that were generated using the proposed method
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
470
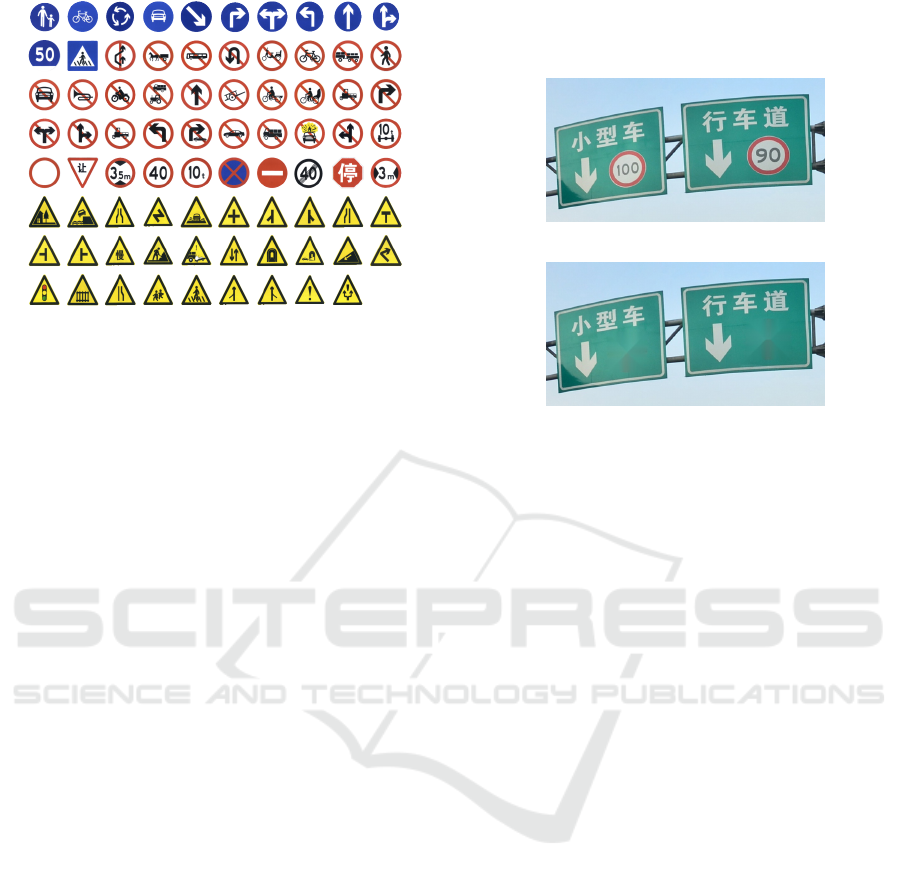
Figure 8: List of the traffic signs that were used in this ex-
periment.
(Set 2), and synthetic images that were generated us-
ing Zhu’s random method (Set 3).
For Set 1, we used 6,103 images as is from the
TT100K training set.
For Set 2, we used 6,103 synthetic images that
were generated using the proposed method. We used
6,103 images from the TT100K training set as the
background images that included the traffic signs
which were needed by the proposed method. We used
Moiseev’s degradation model for generating the traf-
fic signs. In this experiment, we used only the bright-
ness change, saturation change, Gaussian blur, Gaus-
sian noise, and scaling from Moiseev’s degradation
model. We did not apply any geometric deforma-
tion to the sign, such as a three-dimensional rotation,
translation, or projective transformation. The param-
eters that were given to the degradation model were
tuned by hand.
For Set 3, we used 6,103 synthesized scene images
that were generated by pasting the synthesized signs
at random locations. To validate the impact of context
information on model precision alone, we set all the
conditions to be the same between Set 2 and Set 3, ex-
cept for the locations at which the signs were pasted.
Thus, we used same background images for Set 2 and
Set 3 and made the number, size, and shapes of the
synthesized signs included in the scene images to be
the same.
There is one issue that must be resolved. The
scene images used for Set 2 originally contain traf-
fic signs. If these images are used as the background
images for Set 3, then the scene images would simul-
taneously include both the traffic signs that were orig-
inally included in the scene images and synthetic traf-
fic signs that were pasted at random locations. There-
fore, we used the inpainting method of Telea et al.
(Telea, 2004) to remove the traffic signs that were
originally contained in the background images. We
set the radius parameter for the inpainting to a value
of 3. An example of traffic sign removal using in-
painting is shown in Figure 9.
(a) Original image
(b) Inpainted image
Figure 9: Example of the removal of traffic signs using in-
painting.
4.2 Training Method
Here, we explain the training method for faster R-
CNN. The training parameters below were selected
based on the research of Cheng et al. (Cheng et al.,
2018) who performed training using a combination
of TT100K and faster R-CNN. We used the momen-
tum SGD for the network optimization method. The
learning rate was initialized as 0.001 and was set as
0.0001 after the seventh epoch. The input resolution
for the faster R-CNN was set as 1280×1280 pixels.
Although it would have been ideal to perform the
evaluation using the original resolution of TT100K,
which was 2048×2048 pixels, we reduced the input
resolution in this evaluation to improve the training
speed. The training was conducted until the 15th
epoch. GTX 1080 Ti was used for the training. 15
epochs of the training required approximately half a
day.
4.3 Evaluation Results and Discussion
We used actual images (Set 1), synthesized images
generated using the proposed image (Set 2), and
synthesized images generated using Zhu’s random
method (Set 3) to train a total of three models. The
progress of mean Average Precision (mAP) of the
models is shown in Figure 10. The baseline shown
in the graph refers to the random method. The com-
parison of mAP in the 15th epoch after the training
has completed shows that the model trained using the
proposed method has mAP that is approximately 8%
Context-aware Training Image Synthesis for Traffic Sign Recognition
471
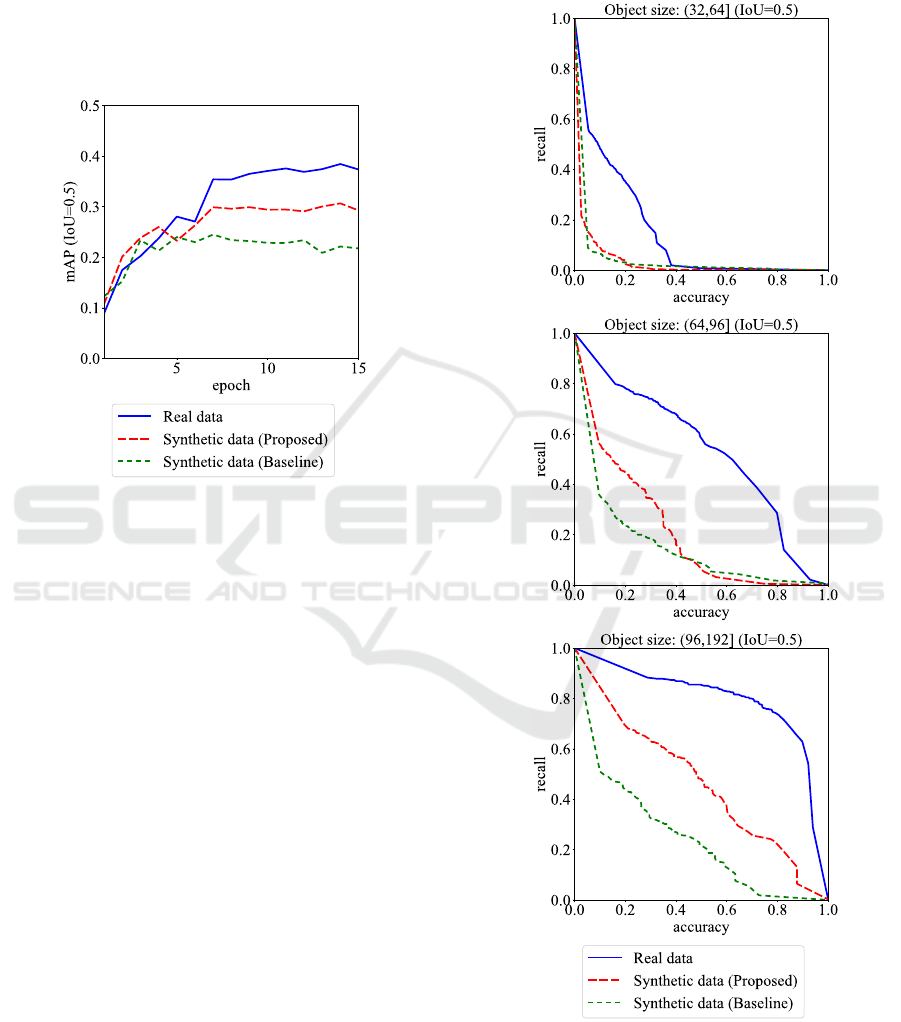
higher than that of the model trained using the ran-
dom method. The difference between the proposed
method and random method lies in only the locations
at which the synthesized signs are pasted. Therefore,
the results demonstrate that preserving the context in-
formation is important for improving the precision
when generating the training data for an end-to-end
traffic sign detector and classifier.
Figure 10: Relationship between epoch and mAP of faster
R-CNN.
In contrast, mAP of the model that was trained
using the proposed method was approximately 7%
lower than that of the model trained using the actual
images. It is thought that there are two reasons for
this difference. The first reason is that in this study,
we did not consider the context information when de-
termining the values of the parameters given to the
degradation model when generating the sign images.
For example, we did not set the brightness parameter
to match the brightness of the area surrounding the
signs. Therefore, there are cases in which a dark syn-
thesized sign is pasted on a bright area.
The second reason is that the edge between the
synthesized signs and background image is obvious.
It is necessary to use techniques such as alpha blend-
ing when pasting the traffic signs on the background
images.
To analyze the difference in the performances
of the proposed model and the model trained using
the actual images, we calculated the accuracy-recall
curves for each traffic sign size (Figure 11). The
graphs demonstrate two points. For large signs that
have a size in the range from 64 to 192 pixels, the
difference between the proposed method and random
method is significant. The graphs demonstrate the ef-
fectiveness of the proposed method. However, for the
signs that have a size in the range from 32 to 64 pix-
els, the precisions of the proposed method and ran-
dom method are both lower than that of the models
trained using actual images.
Figure 11: Accuracy-recall curves based on traffic sign size.
This suggests that detecting small target objects
are relatively more influenced by their surrounding
scenes. In this study, the context information was con-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
472

sidered only in relation to selecting the locations for
pasting the road signs. In the future, we will also con-
sider the context in relation to setting the parameters
to assign to the degradation model when generating
the signs.
5 CONCLUSION
In this paper, we propose a method for training end-
to-end traffic sign detectors without using actual im-
ages of the traffic signs. Our proposed method en-
ables generating scene images that preserve the con-
text information surrounding the traffic signs. The
proposed method achieves mAP that is approximately
8% higher than that of the conventional method, in
which the signs are pasted at random locations. This
result demonstrates that training using scene images
that preserve the context information is effective for
improving the precision. However, mAP of the pro-
posed method is approximately 7% lower than that of
the sign detectors that are trained using actual images.
The difference in the precision is high for signs that
are relatively small in the scenes compared with the
models trained using actual images. It would be pos-
sible to improve the precision by considering the con-
text information when determining the values of the
degradation parameters for generating synthetic traf-
fic signs.
REFERENCES
Baird, H. S. (1992). Document Image Defect Models, pages
546–556.
Cheng, P., Liu, W., Zhang, Y., and Ma, H. (2018). Loco:
Local context based faster r-cnn for small traffic sign
detection. In MultiMedia Modeling, pages 329–341.
Fritsch, J., Kuehnl, T., and Geiger, A. (2013). A new per-
formance measure and evaluation benchmark for road
detection algorithms. In International Conference on
Intelligent Transportation Systems (ITSC).
Haselhoff, A., Nunn, C., M¨uller, D., Meuter, M., and Roese-
Koerner, L. (2017). Markov random field for image
synthesis with an application to traffic sign recogni-
tion. In 2017 IEEE Intelligent Vehicles Symposium
(IV), pages 1407–1412.
Hoessler, H., W¨ohler, C., Lindner, F., and Kreßel, U.
(2007). Classifier training based on synthetically gen-
erated samples. In 5th International Conference on
Computer Vision Systems (ICVS).
Ishida, H., Takahashi, T., Ide, I., Mekada, Y., and Murase,
H. (2006). Identification of degraded traffic sign sym-
bols by a generative learning method. In 18th Inter-
national Conference on Pattern Recognition (ICPR),
volume 1, pages 531–534.
Ishida, H., Takahashi, T., Ide, I., Mekada, Y., and Murase,
H. (2007). Generation of training data by degrada-
tion models for traffic sign symbol recognition. IEICE
TRANSACTIONS on Information and Systems, E90-
D(8):1134–1141.
Medici, P., Caraffi, C., Cardarelli, E., Porta, P. P., and Ghi-
sio, G. (2008). Real time road signs classification.
In 2008 IEEE International Conference on Vehicular
Electronics and Safety (ICVES), pages 253–258.
Møgelmose, A., Trivedi, M. M., and Moeslund, T. B.
(2012). Learning to detect traffic signs: Compara-
tive evaluation of synthetic and real-world datasets. In
21st International Conference on Pattern Recognition
(ICPR), pages 3452–3455.
Moiseev, B., Konev, A., Chigorin, A., and Konushin,
A. (2013). Evaluation of traffic sign recognition
methods trained on synthetically generated data. In
Advanced Concepts for Intelligent Vision Systems
(ACIVS), pages 576–583.
Peng, E., Chen, F., and Song, X. (2017). Traffic sign detec-
tion with convolutional neural networks. In Cognitive
Systems and Signal Processing (ICCSIP), pages 214–
224.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2012). Man vs. computer: Benchmarking machine
learning algorithms for traffic sign recognition. Neu-
ral Networks, 32:323 – 332.
Telea, A. (2004). An image inpainting technique based on
the fast marching method. Journal of Graphics Tools,
9(1):23–34.
Urˇsiˇc, P., Tabernik, D., Mandeljc, R., and Skoˇcaj, D. (2017).
Towards large-scale traffic sign detection and recog-
nition. In 22nd Computer Vision Winter Workshop
(CVWW).
Zhu, Z., Liang, D., Zhang, S., Huang, X., Li, B., and Hu, S.
(2016). Traffic-sign detection and classification in the
wild. In 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 2110–2118.
Context-aware Training Image Synthesis for Traffic Sign Recognition
473
