
Physiotherapy Exercises Evaluation using a Combined Approach based
on sEMG and Wearable Inertial Sensors
Ana Pereira
1
, Duarte Folgado
1
, Ricardo Cotrim
2
and In
ˆ
es Sousa
1
1
Associac¸
˜
ao Fraunhofer Portugal Research, Rua Alfredo Allen 455/461, Porto, Portugal
2
Plux Wireless Biosignals S. A., Avenida 5 Outubro 70, 1050-59, Lisboa, Portugal
Keywords:
Physiotherapy, Inertial Sensors, Electromyography, Body Area Networks, Automatic Segmentation.
Abstract:
The efficacy of home-based physiotherapy depends on the correct and systematic execution of prescribed
exercises. Biofeedback systems enable to accurately track exercise execution and prevent patients from un-
consciously introduce incorrect postures or improper muscular loads on the prescribed exercises. This is often
achieved using inertial and surface electromyography (sEMG) sensors, as they can be used to monitor human
motion variables and muscular activation. In this work, we propose to use machine learning techniques to
automatically assess if a given exercise was properly executed. We present two major contributions: (1) a
novel sEMG segmentation algorithm based on a syntactic approach and (2) a feature extraction and classifica-
tion pipeline. The proposed methodology was applied to a controlled laboratory trial, for a set of 3 different
exercises often prescribe by physiotherapists. The findings of this study support it is possible to automatically
segment and classify exercise repetitions according to a given set of common deviations.
1 INTRODUCTION
Over the last years, the world’s ageing population and
prevalence of chronic diseases has lead to an increas-
ing demand of efficient healthcare systems (Stankovic
et al., 2005). In general, physiotherapy is applied not
only to functional repair, but also in the prevention
of motor complications. In order to optimize the pre-
scribed treatment program, the exercises must be ex-
ecuted repeatedly and in the correct manner.
Home-based exercise physiotherapy allows stim-
ulating muscular activity more often, by enabling the
patient to execute the prescribed exercises at home.
However, home-based physiotherapy comes at the
cost of an additional effort to properly educate the
patients for its benefits, allowing to maintain a con-
tinued adherence to the program (Bassett, 2003). The
exercises should be correctly and rigorously executed,
however, patients often demonstrate uncertainty with
regards to proper exercise technique and not remem-
bering the complete training program as presented on
the clinic (Smith et al., 2005). In these circumstances,
several deviations may occur from the ideal move-
ment: the unconscious introduction of compensation
movements or postures, insufficient range of move-
ments, improper timing of muscular activation or even
biomechanical misalignment.
In order to overcome such challenges, biofeed-
back systems may be used. Biofeedback usually in-
volves measurement of a target biomedical variable
and relaying it to the user (Giggins et al., 2013). Pro-
viding patients with biofeedback during physiother-
apy can have potential therapeutic effects, as it en-
sures movements and loads are being executed ac-
cording to prescription and simultaneously engag-
ing patients in their physiotherapy programs (Ferreira
et al., 2014).
Biofeedback rely on different sensors to quantify
motion. Inertial sensors play an important role in
characterizing human motions, as they are able to re-
trieve motion characteristics such as acceleration, ro-
tation, angular velocity and posture information. On
the other hand, Surface electromyographic sensors
(sEMG) can be used to evaluate muscular activation
and contraction.
This work presents a feasibility study aiming to
combine inertial and sEMG information. The main
motivation lies on the challenges arising from real
home-based physiotherapy programs. During such
sessions, which may exhibit variability across sub-
jects and environments, sEMG might be used to pre-
cisely identify the intervals of muscular activation. In-
ertial information is then used to characterize the pos-
ture and movement correctness, allowing a more ac-
curate temporal resolution of classification.
The rest of this paper is organized as follows:
Section 2 describes previous work on biofeedback
systems and methodologies using inertial and sEMG
Pereira, A., Folgado, D., Cotrim, R. and Sousa, I.
Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors.
DOI: 10.5220/0007391300730082
In Proceedings of the 12th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2019), pages 73-82
ISBN: 978-989-758-353-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
73

senors applied to motion quantification. Section 3 de-
scribes the methods used for evaluating physiotherapy
exercises, while Section 4 and 5 present the results
and its discussion, respectively. Section 6 concludes
this paper, highlighting some areas of future work.
2 RELATED WORK
In order to ensure the proper efficacy of physical
physiotherapy programs, there is a need for contin-
uous and systematic evaluation of the execution of
prescribed exercises. Recent research has been try-
ing to explore the opportunities arising from techno-
logical advances to provide enhancements in moni-
toring physiotherapy exercises in home environment.
Outside the clinical environment, biofeedback sys-
tems rely on retrieving motion data, properly quan-
tify and characterize such data and issue recommen-
dations to the patient. Methods to achieve biome-
chanical analysis consist of force and balance plat-
forms, vision-based motion capture systems and sys-
tems based on inertial sensors. (Barandas et al., 2015)
used Microsoft Kinect to retrieve Range of Motion to
provide real-time biofeedback. (Pereira et al., 2017)
used multiple Inertial Measurement Unit (IMU) to es-
timate joint angles with a strong correlation between
the proposed approach and the groundtruth, which
was based on a video system.
For an unobtrusive evaluation of exercise quality,
studies investigated the feasibility of inertial sensors
to provide accurate classification of exercise perfor-
mance in patients executing lower limb exercises for
rehabilitation monitoring. (Giggins et al., 2014) used
a logistic regression to classify between correctly and
incorrectly labelled variations of 7 types of exercises,
achieving an accuracy of 81-83% on binary exercise
classification and 61-63% on multi-label classifica-
tion (i.e. characterizing the type of error executed).
(Huang et al., 2016) combine accelerometer and gy-
roscope data from 3 inertial sensors located on tight,
shin and the foot, and through logistic regression, De-
cision Tree, Multilayer Perception Neural Network,
Support Vector Machines, Random Forest, and Ad-
aboost classifiers, achieved accuracies between 78-
97% when classifying normal vs. error, and 92-97%
when classifying the type of error occurred. More
recently, (Bevilacqua et al., 2018) applied similar
approaches to knee rehabilitation exercises on both
clinical and healthy subjects. Using a single inertial
sensor located on the shin, a binary classification us-
ing Random Forest and Decision Trees were applied
to 4 different knee rehabilitation exercises, achieving
overall accuracies of 88-97%.
Whilst inertial sensors proved to be valuable
sources of information to characterize exercise execu-
tion, they still face some inherent limitations on dis-
tinguishing active vs. passive performance of a move-
ment or ensuring information is being extracted from
muscular loaded or unloaded performance of a given
activity. sEMG can be used to overcome such limi-
tations as the amplitude of sEMG signal is related to
muscle torque and activation (De Luca, 1997). With
this reasoning, (Roy et al., 2009) studied the feasibil-
ity of introducing sEMG data while monitoring activ-
ities of daily living in functional assessment of stroke
patients. (Liu et al., 2017) proposed the develop-
ment of an upper limb rehabilitation training system
designed to be used by children with cerebral palsy.
(Ghasemzadeh et al., 2010) studied the application of
sEMG to assess human balance, where fiducial fea-
tures based on the sEMG were used, with high accu-
racy, to provide significance of each quantitative pa-
rameter applied to balance assessment.
Another specific application of wearable technol-
ogy in physiotherapy is the development of smart
gloves to be integrated into serious games. The com-
bination of IMUs to estimate orientation and piezore-
sistive force sensors to estimate fingers’ compression
and flexion can be used in hand movement physio-
therapy systems for stroke patients. (Sun et al., 2017)
implemented a linear discriminant analysis classifier
to distinguish between a basic set of hand gestures
and key press events. (Alexandre and Postolache,
2018) proposed a virtual reality game to stimulate pa-
tients performing interactive exercises while simulta-
neously recording motion parameters.
The related work allowed to highlight evidence of
the notable properties of the IMU and sEMG sensors
in the evaluation of Human motion, more precisely in
physiotherapy contexts. Exercise execution in home
environments, in which there is no direct supervi-
sion of a physiotherapist, must be accurately moni-
tored. Patients may inadvertently perform additional
deviations from prescribed exercises by performing
compensation movements. Therefore, it is impor-
tant to evaluate whether compensation exists when the
muscular activation is being employed. This can be
achieved by means of the sEMG, which in long-term
home sessions might be used to accurately identify
the intervals of muscular activation. Over those in-
tervals, an accurate posture and exercises correctness
evaluation can be performed.
BIOSIGNALS 2019 - 12th International Conference on Bio-inspired Systems and Signal Processing
74

3 MATERIALS AND METHODS
A cross-sectional analytic study was conducted to ex-
amine two research questions: 1) whether sEMG sen-
sors can be used to automatically segment physio-
therapy exercises repetitions, and 2) whether phys-
iotherapy exercise classification performance can be
improved using information regarding the posture of
the patient during the exercise.
For that purpose, 7 subjects were recruited to per-
form three different physiotherapy exercises. Two
Body Network Area (BAN)s
1
(depicted on Figure 1
a) and two inertial units (Fraunhofer AICOS, 2016)
(depicted on Figure 1 b) were placed on the subject’s
body in locations defined to maximize the retrieval
of relevant information for each exercise. During the
acquisition, annotations were performed in real-time
regarding instants that correspond to transitions be-
tween repetitions. Sensor data was then segmented
manually (i.e. using the annotations) and automati-
cally using the methodology that will be thoroughly
presented in Section 3.3. A machine learning pipeline
was then applied for classifying the exercises into cor-
rect and incorrect executions.
Figure 1: Wearables used in this study: (a) two Body Net-
work Areas placed on the lower and upper trapezium, and
(b) two inertial units placed on the upper arm and forearm.
3.1 Data Collection
Participants
Seven healthy subjects, with an average age of 27
± 1 years old, 4 men, 3 women, participated in this
study. All participants had an active lifestyle and did
not previously executed the prescribed exercises in
physiotherapy contexts. Subjects requiring physical
physiotherapy were not included in this first stage
of the study since only the feasibility of the listed
research questions was being explored at this stage.
All participants provided informed consent before
starting data collection.
1
http://www.biosignalsplux.com/en/muscleban
Sensors
Two types of wearables were used for data collec-
tion: two inertial sensor units (equipped with a tri-
axial accelerometer, gyroscope and magnetometer),
and two BAN’s equipped with an electromyography
sensor and an accelerometer. Inertial units were at-
tached to the body through bracelets and BANs were
attached to specific body locations using electrodes.
These devices communicated wirelessly with a smart-
phone via Bluetooth Low Energy. The inertial data
from both wearables was collected at 50 Hz. The raw
sEMG was acquired at 1000 Hz, the sEMG envelope
was calculated locally on the device and the resulting
sEMG envelope was streamed at 50 Hz. The devices
were placed on different locations of the body accord-
ing to the exercise: inertial units were placed on spe-
cific body segments for the assessment of posture on
upper and lower limbs and the BAN’s wearables were
placed on body locations which enabled to measure
muscular activity.
Protocol
The data collection protocol was defined by a physio-
therapist to ensure the exercises are relevant in clinical
practice. Three physiotherapy exercises were selected
from the Physiotec
2
exercise database. Physiotec
divides physiotherapy exercises into three phases:
phase 1 consists of static exercises, phase 2 is com-
posed of dynamic and analytic exercises, and phase
3 includes dynamic and functional exercises. In or-
der to promote variability, one exercise of each phase
was selected. For each exercise, the physiotherapist
defined two possible deviations which represented in-
correct human postures often occurring during exer-
cises execution. The selected exercises, respective de-
viations and wearables’ location are listed in Table 1.
All data collection was performed in laboratory
settings, where wearables were placed on each partic-
ipant by the physiotherapist. Participants performed
a variable number of repetitions (between five to ten)
of each of the three studied exercises. The exercises
were executed correctly and intentionally incorrectly,
according to the deviations defined in Table 1. All the
exercises and deviations were described to each par-
ticipant prior to the start of data collection. The in-
stants corresponding to the beginning and end of each
repetition were manually annotated by a researcher
during the protocol, consisting of groundtruth for the
segmentation algorithm.
2
https://www.physiotec.ca/index.php
Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors
75
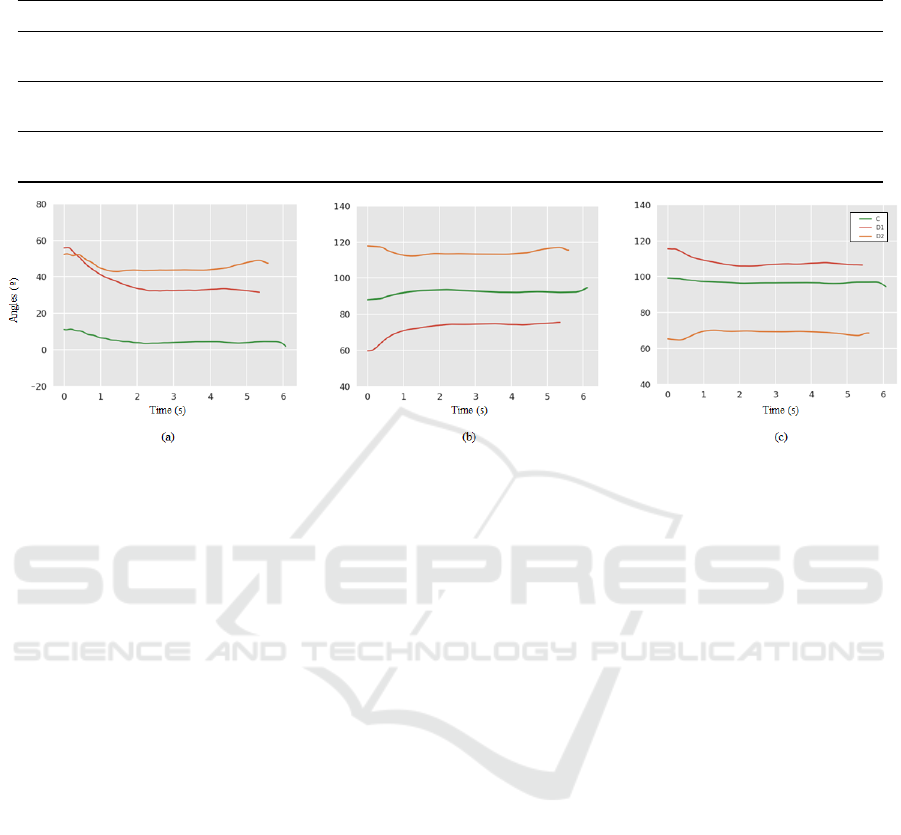
Table 1: Exercises, wearables location, and deviations studied for each exercise (I refers to the inertial units, B to the BANs,
and D represents the different deviations).
Exercise Wearables Location Deviations
1 - Isometric scapular retraction
strengthening (Phase 1)
I - wrist and arm
B - lower and upper trapezium
D1 - Forearm deviated from horizontal position (right forearm up)
D2 - Forearm deviated from horizontal position (left forearm up)
2 - Prone scapular retraction (Phase 2)
I - wrist and arm
B - serratus and upper trapezium
D1 - Compensatory projection of trunk (arms deviated from vertical)
D2 - Incorrect arm position (shoulder displaced backwards)
3 - Forward lunge (Phase 3)
I - wrist and thigh
B - knee and upper trapezium
D1 - Leg not perpendicular with the ground
D2 - Compensatory leg deviation from vertical position
Figure 2: Angles (in degrees) computed from orientation during one repetition (x-axis) for correct (C) execution and with
deviations 1 (D1) and 2 (D2). (a) Angle between the arm and forearm (elbow flexion/extension angle) during exercise 2, (b)
angle with vertical of the forearm during exercise 1; (c) angle with vertical of the upper arm during exercise 2.
3.2 Signal Processing
The data obtained from the four wearable devices was
preprocessed in order to reduce undesired noise using
a low-pass filter. In order to characterize posture, the
tilt angles (roll and pitch) were obtained from the ac-
celerometer data of the BANs wearables. Addition-
ally, to have more information regarding human pos-
ture, data from the accelerometer and gyroscope of
these devices was fused using a second order com-
plementary filter, bringing together the relevant infor-
mation of each sensor to compute the orientation of
the device. Applying the methodology developed in
(Pereira et al., 2017), the orientation obtained enabled
to compute the angle between the two inertial units in
exercises 1 and 2, that is the angle between the arm
and the forearm, which corresponds to the elbow flex-
ion/extension angle (example illustrated in Figure 2 a
for exercise 2), and also the angle of each inertial unit
with the vertical (example illustrated in Figure 2 b and
c for exercise 1). Angular information of anatomical
segments allows discriminating between correct exe-
cution and the prescribed deviations. Proper assess-
ment of exercise execution should not only ensure the
patient is performing adequate muscular contractions,
but also ensure the contractions are being performed
with the correct posture and without the intentional
introduction of compensatory movements.
3.3 Segmentation
As previously discussed in Section 2, the sEMG sig-
nal is related with muscular activation. The segmen-
tation of sEMG comprises the task of identifying the
temporal intervals in which activation is present, quite
often by analyzing the sEMG envelope. In this study,
we propose and validate a new method based on a
syntactic approach. We used a recent tool called
SSTS (Rodrigues et al., 2019), which is capable of ex-
ploring time series data for pattern and query search
tasks.
Human reasoning has an inherent capability for
recognizing patterns and complex structures. We
can take advantage of this characteristic to ease the
process of finding patterns in several time series
applications. SSTS aims to facilitate the interaction
between data scientists and the challenges arising
from data manipulation and knowledge extraction.
By proposing a symbolic method for pattern search,
which is tightly related to the reasoning and visual
analysis of time series data, it allows improving the
pattern and query search task productivity, which was
properly demonstrated on the aforementioned work.
In this work, we also validate that assumption moti-
vated by delivering a new automatic segmentation for
sEMG data with minimum design effort taking the
advantages of the SSTS capabilities. SSTS converts
BIOSIGNALS 2019 - 12th International Conference on Bio-inspired Systems and Signal Processing
76

0z0p0p0p0p1p1p1p1n1n0n0n0p0p0p1p1p1n1n1n0n0n0n0z
Pre-Processing Symbolic Connotation Search
☴ 0.1 50 ~ 25
⇞0.5 ∂ 0.01
0n0p
3
21
☴ (s, fc1, fs) – Lowpass filter of 0.1 Hz with sampling frequency
of 50 HZ
~ (s, w) – Moving average filter with window size of 25 samples
⇞(s, thr) – Amplitude thresholding. Above threshold is “1”, under thr
is “0”;
∂(s, thr) - Derivative of the signal (s) with a rounding threshold. P - is
the positive derivative, n - the negative and z - the stationary part.
(0n0p) – Searches for this occurence, which is a local minima.
Amplitude (mV)
Time(s)
Amplitude
Time
0z0p0p0p0p1p1p1p1n1n0n0n0p0p0p1p1p1n1n1n0n0n0n0z
Figure 3: Initial sEMG segmentation. The sEMG signal is divided into cycles, which give an initial estimation of the activation
period. Cycles are calculated by finding local minima using Syntactic Search for Time Series (SSTS).
0z0z0z0z1p1p1p0n0p1n1n0z0z1p1p0p0p0n1p1n1n1n0z0z
0z0z0z0z1p1p1p0n0p1n1n0z0z1p1p0p0p0n1p1n1n1n0z0z
Pre-Processing Symbolic Connotation Search
☴ 1 50 ~ 25
↕0.5 ∂ 0.01
onset: 1p | offset: 1n
3
21
↕(s, thr) – Determines if amplitude from a local minima to
maximum (and vice-versa) is greater than thr.
∂(s, thr) - Derivative of the signal (s) with a rounding threshold. P - is
the positive derivative, n - the negative and z - the stationary part.
(1p) – Detects all ocurrences of “1p”.
(1n) – Detects all ocurrences of “1n”.
Amplitude (mV)
Time(s)
Amplitude
Time
☴ (s, fc1, fs) – Lowpass filter of 1 Hz with sampling frequency of
50 HZ
~ (s, w) – Moving average filter with window size of 25 samples
Figure 4: Accurate sEMG onset and offset detection. For each cycle previously detected the onsets are found by using SSTS
to query for ”a pronounced amplitude rise” and offsets by querying ”a pronounced amplitude decrease.” False positives are
eliminated by only considering the first occurrence of the onset search regex string and last occurrence of the offset search
string.
time series data from numeric to string domain with
the resource of 3 symbolic steps: (1) preprocessing;
(2) symbolic connotation and (3) search. In the string
domain, characterized by a symbolic representation
defined by the user, queries are performed using string
query methods. Whilst on the rest of this subsection
we provide guidance to follow the methods used by
SSTS to segment the sEMG, it is recommended that
for a comprehensive understanding the reader may re-
fer to the original publication.
Overview
The proposed sEMG segmentation is composed by
two stages. Firstly, the sEMG activation periods are
initially divided into cycles. This is accomplished by
analyzing the lower frequency components of the sig-
nal as depicted on Figure 3. Whilst this procedure
may at an initial glance be sufficient, it does not al-
low an accurate temporal resolution of the onset and
offset events. Secondly, after the initial cycle segmen-
tation there is a more accurate onset and offset detec-
tion within the time intervals corresponding to each
detected cycle as depicted on Figure 4. This com-
bined approach also reduces the occurrence of false
positives.
Preprocessing
During this step, symbolic tokens are attributed to
common methods for preprocessing. A string con-
taining the set of tokens and their corresponding argu-
ments are passed as input, thus, corresponding to the
preprocessing methods and parameters. The sEMG
envelope was filtered using lowpass filtering and mov-
ing average as described in Step 1 of Figure 3.
Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors
77

Connotation
The symbolic connotation step generates a sequence
of symbols based on connotation methods defined by
the user. Ideally, the method should be related to spe-
cific attributes of the time series that are considered
relevant for the target search procedure. Each sample
is represented by a number of tokens that correspond
to the number of connotation methods that were used.
In the current approach, two connotations methods
were applied in the initial stage - amplitude thresh-
olding and first derivative: ”0p” represents a sam-
ple with value below a given threshold with positive
derivative; ”0n” represents a sample with value below
a given threshold with negative derivative; ”1z” would
represent a sample with amplitude above the given
threshold with zero derivative. The same reasoning
applies to other connotation methods. The sEMG ac-
tivation is characterized in the sEMG envelope by a
significant rise in amplitude in comparison with the
baseline (onset), followed by a plateau during mus-
cular activation and terminating in a significant de-
crease in amplitude to baseline (offset). A well estab-
lished method that is frequently used, takes into ac-
count this property. (Hodges and Bui, 1996) required
that the mean of the points in a sliding window ex-
ceed a given threshold (the value usually is a multiple
of the standard deviation). The applied connotation
methods were inspired by that approach and are de-
scribed in Step 2 of Figure 4.
Search
After the connotation step, the signal is translated
from the numeric to the symbolic domain. A search
string is used in the form of a regular expression
(regex). The regex used in both stages is depicted in
Step 3 of Figure 3 and 4. In the initial stage, in which
the objective is to find the occurrences of local min-
ima, the search consists of finding all the occurrences
of: ”a negative first derivative, followed by a positive
first derivative, below a given amplitude threshold”,
which is expressed as ”0n0p”. The accurate onset de-
tection is performed by querying for a ”pronounced
amplitude rise”, which holds true by the connotation
method - ”1p”. Offset detection is achieved by query-
ing for a ”pronounced amplitude decrease” - ”1n”. It
is worth to mention that muscular activity does vary
during contraction periods and thus, the EMG enve-
lope may in some circumstances have associated vari-
ability and noise. This fact leads to the appearance of
false positives. However, since a rough estimation of
EMG segmentation was achieved on the initial stage,
we can remove the false positives by only considering
the first positive match of ”1p” for onset and the last
positive match of ”1n” for the offsets.
3.4 Machine Learning Pipeline
After segmentation, temporal and statistical do-
main features were extracted for each time win-
dow (Figueira et al., 2016). Statistical features such
as skewness, kurtosis and histogram, and tempo-
ral such as mean, median, maximum, minimum,
variance, temporal centroid, standard deviation, root
mean square, and auto correlation, were extracted us-
ing Python numpy v1.11.3. After feature extraction,
it was possible to conclude that many of the features
were correlated and could be removed without loos-
ing information, therefore, forward feature selection
was applied.
Supervised learning methods were used to dis-
criminate between a correct execution and a execution
with a deviation, specifying the type of the deviation
occurred. Therefore, each time window was classi-
fied into correct (C), deviation 1 (D1) and deviation 2
(D2). Using scikit-learn v0.19.1, a Python Machine
Learning library, on Python 2.7.13, four classifiers
were tested to addressed this problem: Decision Trees
(DT), K-Nearest-Neighbours (KNN), Support Vector
Machines (SVM), and Random Forest (RF). The clas-
sifiers trained separately manual and automatic seg-
mented time windows (repetitions) and also two dif-
ferent set of features: features extracted only from the
BANs and then features from all wearables, namely
the two inertial units and the two BANs.
For validation purposes, leave-one-user-out-cross
validation was employed in order to ensure indepen-
dence of the subject. To evaluate the performance
of each classifier, accuracy, sensitivity, and specificity
were computed. While accuracy measures the overall
effectiveness of a classifier, sensitivity measures the
effectiveness of a classifier at identifying a desired la-
bel, and specificity measures the classifiers ability to
detect negative labels.
Table 2: Total number of time windows for all three classes
based on the method of segmentation.
Class Exercise 1 Exercise 2 Exercise 3
Manual Segmentation
C 63 71 57
D1 54 56 28
D2 53 55 27
Automatic Segmentation
C 55 67 55
D1 51 56 27
D2 46 41 27
BIOSIGNALS 2019 - 12th International Conference on Bio-inspired Systems and Signal Processing
78

Table 3: Multi-label classification results obtained for DT, KNN, RF and SVM classifiers for each exercise and for each set of
features (features extracted only from BAN and from BAN and Inertial Units). Mean and standard deviation of the specificity
and sensitivity are reported in %.
DT KNN RF SVM
Exer. Set Meas. C D1 D2 C D1 D2 C D1 D2 C D1 D2
1
BAN
Sens 73 ± 32 98 ± 2 88± 18 78 ± 9 92 ± 5 90 ± 12 67 ± 30 87 ± 20 82 ± 17 80 ± 21 86 ± 17 97 ± 5
Spec 82 ± 28 66 ± 36 73 ± 35 73 ± 25 78 ± 17 70 ± 15 61 ± 43 52 ± 44 57 ± 41 86 ± 18 80 ± 29 63 ± 29
BAN + Inertial
Sens 100 ± 0 100 ± 0 99 ± 1 100 ± 0 100 ± 0 99 ± 26 100 ± 0 96 ± 5 99 ± 1 100 ± 0 100 ± 0 100 ± 0
Spec 100 ± 0 98 ± 3 100 ± 0 100 ± 0 100 ± 0 100 ± 0 100 ± 0 98 ± 3 93 ± 11 100 ± 0 100 ± 0 100 ± 0
2
BAN
Sens 76 ± 13 90 ± 14 90 ± 8 86 ± 13 87 ± 7 91 ± 9 61 ± 23 85 ± 15 88 ± 18 54± 37 85 ± 20 96 ± 5
Spec 80 ± 20 61 ± 29 75 ± 25 74 ± 17 82 ± 23 75 ± 19 74 ± 28 36 ± 22 60 ± 33 78 ± 21 53 ± 40 41 ± 40
BAN + Inertial
Sens 96 ± 10 97 ± 7 97 ± 4 99 ± 1 100 ± 0 99 ± 2 95 ± 7 100 ± 0 94 ± 9 98 ± 5 98 ± 3 99 ± 1
Spec 92 ± 14 95 ± 12 91 ± 22 98 ± 3 98 ± 3 100 ± 0 92 ± 14 89 ± 15 98 ± 3 100 ± 0 97 ± 4 95 ± 12
3
BAN
Sens 71 ± 21 91 ± 13 89 ± 12 48 ± 20 94 ± 5 98 ± 2 55 ± 15 79 ± 13 91 ± 13 40 ± 14 98 ± 3 98 ± 2
Spec 95 ± 7 50 ± 30 71± 34 96 ± 4 53 ± 33 27 ± 20 77 ± 16 51 ± 27 22 ± 23 98 ± 3 66 ± 41 10 ± 15
BAN + Inertial
Sens 100 ± 0 97 ± 4 100 ± 0 91 ± 16 97 ± 5 100 ± 0 95 ± 5 95 ± 6 90 ± 15 84 ± 13 100 ± 0 100 ± 0
Spec 96 ± 7 100 ± 0 100 ± 0 96 ± 7 96 ± 7 86 ± 29 91 ± 9 71 ± 28 93 ± 14 100 ± 0 100 ± 0 70 ± 25
4 RESULTS
In this study, 7 participants performed three exercises
which were labelled with 3 classes: correctly, and
with deviations 1 and 2. Table 2 details the dataset
collected applying manual and automatic segmenta-
tion, resultant from the annotations performed dur-
ing data collection, and from the automatic segmen-
tation approach described in Section 3.3, respectively.
As it can be seen, the number of detected time win-
dows (repetitions) applying automatic segmentation
is lower than the ones that were manually annotated.
Results of the leave-one-user-out-cross validation
for the assessment of the classification performance
are presented in Table 3 and Table 4. It is presented
the performance scores obtained for each exercise
with the four classifiers considering the two sets of
features: features extracted from the BAN data and
features extracted from both the BAN and the inertial
units. Relatively high average accuracy scores were
achieved considering features from both wearable for
all three exercises, being the DT and the KNN classi-
fiers the ones that achieved higher accuracies. Addi-
tionally, sensitivity and specificity were also high in
general, however, for exercise 3, KNN, RF, and SVM
demonstrated a few confusion in distinguish classes
D1 and D2, which compromise the value of the speci-
ficity for these two classes. Nonetheless, when us-
ing only features from the BANs wearables, accuracy
considerably decreased, as well as specificity and sen-
sitivity, for all four classifiers and exercises. For this
case, the standard deviation values of the metrics pre-
sented are high, which means that the values obtained
during validation were actually different depending
on the test user.
Table 5 compares the overall accuracy of the clas-
sification performance for the manual and automatic
segmentation, which was obtained when using fea-
tures from all wearables. As it can be seen, the values
presented are approximately identical, except in exer-
cise 2 for RF and SVM classifiers.
Table 4: Mean accuracy and standard deviation (%) for DT,
KNN, RF and SVM classifiers for each exercise and for
each set of features (features extracted only from BAN and
from BAN and Inertial Units). Mean and standard deviation
are reported in %.
Exer Set DT KNN RF SVM
1
BAN 76 ± 15 74 ± 8 60 ± 7 78 ± 13
BAN + Inertial 99 ± 1 100 ± 0 97 ± 3 100 ± 0
2
BAN 72 ± 12 77 ± 10 60 ± 13 63 ± 11
BAN + Inertial 94 ± 9 98 ± 2 93 ± 3 97 ± 5
3
BAN 71 ± 3 86 ± 7 57 ± 13 63 ± 6
BAN + Inertial 98 ± 4 98 ± 2 97 ± 3 92 ± 6
Table 5: Overall accuracy (%) for DT, KNN, RF and SVM
classifiers for each exercise and for manual and automatic
segmentation.
Exer Segmentation DT KNN RF SVM
1
Manual 99 ± 1 100 ± 0 97 ± 3 100 ± 0
Automatic 100 ± 0 100 ± 0 97 ± 5 99 ± 1
2
Manual 94 ± 9 98 ± 2 97 ± 3 97 ± 5
Automatic 97 ± 4 96 ± 7 89 ± 16 85 ± 11
3
Manual 98 ± 4 98 ± 2 97 ± 3 92 ± 6
Automatic 93 ± 6 99 ± 6 96 ± 6 89 ± 6
5 DISCUSSION
This research study has explored whether sEMG sen-
sors can be used to automatically detect exercises rep-
etitions and whether additional inertial units placed on
strategic segments of the body can contribute to dis-
tinguish correct exercise performance from deviations
based on the human posture.
Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors
79

The use of sEMG sensor for automatic segmenta-
tion was achieved using the capabilities of SSTS. In
order to ensure that the windows provided to classi-
fication stage were adequate and, consequently, the
classifier was learning from representative data, a val-
idation stage was performed. The automatically de-
tected muscular activation periods (provided by the
onset/offset pairs) that were shorter or longer than the
expected duration according to the protocol weighted
with a given tolerance were discarded. The number of
discarded samples was higher for Exercises 1 and 2.
In fact, later visual analysis of sEMG signals and au-
tomatic segmentation results allow to conclude that in
those exercises noise and artifacts were more promi-
nent, lowering the difference between the amplitude
in muscular activation and baseline, hampering an ad-
equate calculation of threshold.
The results presented on Table 3 and 4 revealed
that is possible to correctly classify physiotherapy ex-
ercises performance from different phases using in-
ertial units with satisfactory levels of accuracy. The
use of inertial units showed a significant improvement
(an increase of 27%, in average) on the accuracy of
all classifiers in each exercise. Since the exercises
deviations were defined based on incorrect postures,
the attachment of inertial units which measure incli-
nation of body segments, enabled to identify more
accurately incorrect executions, which may be unde-
tectable if only the tilt angles of BANs were used.
Machine learning classification techniques were used
to quantify wearable data acquired during the three
exercises studied. Multi-label classifiers (which de-
termine which deviation in a set of deviations) were
employed and the efficacy of these classifiers was
quantified using three efficacy scores; accuracy, sen-
sitivity, and specificity. Results showed that KNN
classifier achieved a recognition accuracy of ≥98%,
which is greater than the other classifiers tested. How-
ever long training and testing times are required for
KNN. The DT classifier achieved the second highest
recognition accuracy in this study, and its training and
testing times were lower than the KNN. Thus, the DT
classifier proved to be an efficient classifier for de-
tecting deviations from correct execution of physio-
therapy exercises.
After identifying the improvement of the classifi-
cation results through the use of inertial units in body
segments, DT, KNN, RF, and SVM classifiers were
also validated in the automatically segmented win-
dows. The results of Table 5 demonstrated no signif-
icant changes in the accuracy values of all classifiers
for each exercise, which proves the feasibility of the
syntactic sEMG onset detection of exercise repetition,
ensuring that muscular activation is being employed.
For the automatic segmented windows, DT and KNN
also achieved the best performances.
The results obtained allow a preliminary com-
parison to previous work that evaluated the use of
inertial units and machine learning to assess exer-
cises performance. The methodology presented in
our study achieved higher results than (Giggins et al.,
2014), and similar results to the (Huang et al., 2016)
and (Bevilacqua et al., 2018) studies. Additionally,
(Huang et al., 2016) and (Bevilacqua et al., 2018)
also used automatic segmentation based on a template
matching algorithm. However, it is worth to mention
that the dataset of this study is significantly smaller
than the datasets of the aforementioned studies. The
size of the datasets was 58, 69 and 54 participants,
respectively for (Giggins et al., 2014), (Huang et al.,
2016) and (Bevilacqua et al., 2018). Therefore, the
developed methodology needs to be tested and vali-
dated against a larger dataset for a more representative
comparison with previous work. It is expected that
accuracy might decrease with an increase of dataset
size (Schnack and Kahn, 2016). However, we believe
the process of combining inertial and sEMG data, by
assuring classification is performed in the moment of
muscular activation, provides more relevant informa-
tion to the exercise performance and the physiothera-
pist.
Besides the size of the dataset collected, there are
other limitations of this study that need to be consid-
ered. Firstly, the data collected was gathered in lab-
oratory settings, where the exercises were performed
under controlled conditions. These conditions may
differ from what may occur at home. Furthermore,
only two deviations were defined per exercise. In a
home-based physiotherapy context, other deviations
in performance may occur that were not considered
when training the classifiers. Another limitation of
this study is that the sample selected was a group of
healthy subjects, so it was not possible to validate
whether the classifiers performed differently for dif-
ferent populations.
Nevertheless, the results obtained in this study are
important as they provide further evidence to suggest
that sEMG signal could be used to detect exercise
repetitions, and that features based on human pos-
ture could support the assessment of exercises perfor-
mance. Moreover, the exercises selected in this study
were from a worldwide database developed by phys-
iotherapists, and were not specific for a single limb
as the studies found in the literature. The exercises
selected were one from each of the three phases of
the physiotherapy process, which proves that the ap-
proach developed could be adapted for a wide range
of exercises.
BIOSIGNALS 2019 - 12th International Conference on Bio-inspired Systems and Signal Processing
80

6 CONCLUDING REMARKS
This paper presents the development of a combined
approach based on sEMG and inertial sensors for
the evaluation of physiotherapy exercises. The ap-
plicability of our approach lies in the implementa-
tion on biofeedback systems to optimize home-based
exercise execution. sEMG signal was used to iden-
tify temporal intervals in which muscular activation
was present. This way, exercise repetitions were seg-
mented into time windows where features related with
human posture were extracted. Then, these features
were fed to DT, KNN, RF, and SVM classifiers, which
were able to distinguish between correct execution
and deviations with an accuracy ≥92%. As part of our
ongoing research, we will validate the proposed sys-
tem on more extensive datasets. The sEMG segmen-
tation will be assessed in a more controlled environ-
ment, using simulated data, to permit the evaluation
of the temporal misalignment between the detected
onset/offsets and groundtruth. The models proposed
will be tested on a more extended dataset, comprising
variability in terms of age and clinical history.
ACKNOWLEDGEMENTS
We acknowledge all participants who participated
in data collection. We would like to acknowl-
edge the financial support obtained from the project
Physio@Home: Extending Physiotherapy Programs
to People’s Home, co-funded by Portugal 2020,
framed under the COMPETE 2020 (Operational Pro-
gramme Competitiveness and Internationalization)
and European Regional Development Fund (ERDF)
from European Union (EU), with operation code
POCI-01-0247-FEDER-017863.
REFERENCES
Alexandre, R. and Postolache, O. (2018). Wearable and iot
technologies application for physical rehabilitation. In
2018 International Symposium in Sensing and Instru-
mentation in IoT Era (ISSI), pages 1–6. IEEE.
Barandas, M., Gamboa, H., and Fonseca, J. (2015). A real
time biofeedback system using visual user interface
for physical rehabilitation. Procedia Manufacturing,
3:823–828.
Bassett, S. F. (2003). The assessment of patient adherence
to physiotherapy rehabilitation. New Zealand journal
of physiotherapy, 31(2):60–66.
Bevilacqua, A., Huang, B., Argent, R., Caulfield, B., and
Kechadi, T. (2018). Automatic classification of knee
rehabilitation exercises using a single inertial sensor:
a case study.
De Luca, C. J. (1997). The use of surface electromyography
in biomechanics. Journal of applied biomechanics,
13(2):135–163.
Ferreira, C., Guimar
˜
aes, V., Santos, A., and Sousa, I.
(2014). Gamification of stroke rehabilitation exercises
using a smartphone. In Proceedings of the 8th Inter-
national Conference on Pervasive Computing Tech-
nologies for Healthcare, pages 282–285. ICST (In-
stitute for Computer Sciences, Social-Informatics and
Telecommunications Engineering).
Figueira, C., Matias, R., and Gamboa, H. (2016). Body
location independent activity monitoring. In BIOSIG-
NALS, pages 190–197.
Fraunhofer AICOS (2016). A Day with Pandlets. Technical
report, Fraunhofer Portugal AICOS.
Ghasemzadeh, H., Jafari, R., and Prabhakaran, B. (2010).
A body sensor network with electromyogram and in-
ertial sensors: Multimodal interpretation of muscular
activities. IEEE transactions on information technol-
ogy in biomedicine, 14(2):198–206.
Giggins, O. M., Persson, U. M., and Caulfield, B. (2013).
Biofeedback in rehabilitation. Journal of neuroengi-
neering and rehabilitation, 10(1):60.
Giggins, O. M., Sweeney, K. T., and Caulfield, B. (2014).
Rehabilitation exercise assessment using inertial sen-
sors: a cross-sectional analytical study. Journal of
neuroengineering and rehabilitation, 11(1):158.
Hodges, P. W. and Bui, B. H. (1996). A compari-
son of computer-based methods for the determina-
tion of onset of muscle contraction using electromyo-
graphy. Electroencephalography and Clinical Neu-
rophysiology/Electromyography and Motor Control,
101(6):511–519.
Huang, B., Giggins, O., Kechadi, T., and Caulfield, B.
(2016). The limb movement analysis of rehabilita-
tion exercises using wearable inertial sensors. In En-
gineering in Medicine and Biology Society (EMBC),
2016 IEEE 38th Annual International Conference of
the, pages 4686–4689. IEEE.
Liu, L., Chen, X., Lu, Z., Cao, S., Wu, D., and Zhang,
X. (2017). Development of an emg-acc-based upper
limb rehabilitation training system. IEEE Transac-
tions on Neural Systems and Rehabilitation Engineer-
ing, 25(3):244–253.
Pereira, A., Guimar
˜
aes, V., and Sousa, I. (2017). Joint an-
gles tracking for rehabilitation at home using inertial
sensors: a feasibility study. In Proceedings of the
11th EAI International Conference on Pervasive Com-
puting Technologies for Healthcare, pages 146–154.
ACM.
Rodrigues, J., Folgado, D., Belo, D., and Gamboa, H.
(2019). Ssts: A syntactic tool for pattern search on
time series. Information Processing & Management,
56(1):61–76.
Roy, S. H., Cheng, M. S., Chang, S.-S., Moore, J., De Luca,
G., Nawab, S. H., and De Luca, C. J. (2009). A
combined semg and accelerometer system for mon-
itoring functional activity in stroke. IEEE Transac-
Physiotherapy Exercises Evaluation using a Combined Approach based on sEMG and Wearable Inertial Sensors
81

tions on Neural Systems and Rehabilitation Engineer-
ing, 17(6):585–594.
Schnack, H. G. and Kahn, R. S. (2016). Detecting neu-
roimaging biomarkers for psychiatric disorders: sam-
ple size matters. Frontiers in psychiatry, 7:50.
Smith, J., Lewis, J., and Prichard, D. (2005). Physiother-
apy exercise programmes: Are instructional exercise
sheets effective? Physiotherapy theory and practice,
21(2):93–102.
Stankovic, J., Cao, Q., Doan, T., Fang, L., He, Z., Kiran,
R., Lin, S., Son, S., Stoleru, R., and Wood, A. (2005).
Wireless sensor networks for in-home healthcare: Po-
tential and challenges. In High confidence medical de-
vice software and systems (HCMDSS) workshop, vol-
ume 2005.
Sun, Q., Gonzalez, E., and Abadines, B. (2017). A wear-
able sensor based hand movement rehabilitation and
evaluation system. In Sensing Technology (ICST),
2017 Eleventh International Conference on, pages 1–
4. IEEE.
BIOSIGNALS 2019 - 12th International Conference on Bio-inspired Systems and Signal Processing
82
