
Analytic Surface Detection in CAD Exported Models
Pavel
ˇ
Sigut
1
, Petr Van
ˇ
e
ˇ
cek
1
and Libor V
´
a
ˇ
sa
2
1
Department of Computer Science and Engineering, University of West Bohemia, Technick
´
a 8, Plze
ˇ
n, Czech Republic
2
NTIS - New Technologies for the Information Society, University of West Bohemia, Technick
´
a 8, Plze
ˇ
n, Czech Republic
Keywords:
Analytic Surface, Fitting, Curvature, Estimation, Analysis, CAD.
Abstract:
3D models exported from CAD systems have certain specifics, that influence their subsequent processing.
Typically, in contrast with scanned surface meshes, vertices of exported meshes lie almost exactly on analytic
surfaces used in CAD modeling. On the other hand, the triangulation of exported models is usually dictated by
the requirement of having the lowest possible number of primitives, which results in highly uneven sampling
density and common appearance of extremely large and small triangle inner angles. For applications such as
classification, categorization, automatic labeling or similarity based retrieval, it is often necessary to identify
significant features of an exported model, such as planar, cylindrical, spherical or conical regions, and their
properties. While this type of information is naturally available in the original CAD system, it is only rarely
exported together with the surface model. In this paper, we discuss two means of identifying analytic regions
in triangle meshes, taking into account the specifics of CAD-exported models, and provide a quantitative
comparison of their performance.
1 INTRODUCTION
In certain applications, large sets of 3D models are
exported from a CAD system in the form of triangle
meshes and further processed in this format. Com-
monly, a very basic file format, such as .STL, is in-
tentionally chosen in order to maximize compatibil-
ity. Apart from being rather inefficient at represent-
ing the mesh connectivity, such format does not in-
clude any additional information about the original
CAD part. The subsequent processing, which might
include classification, categorization, automatic label-
ing or similarity based retrieval, can greatly benefit
from availability of information such as number, lo-
cations and radii of cylindrical holes in the model and
similar high level properties. However, such infor-
mation is lost during the export, and for reasons of
compatibility with multiple CAD tools, it is generally
not an option to define a custom export format that
includes such data.
In particular, common CAD models, such as tech-
nical workpieces or models of buildings, generally
consist of patches defined by simple geometric primi-
tives, such as planes, cylinders, spheres, cones, less
often also tori and more general surfaces. These
patches are tessellated during the export, and thus
turned into piecewise planar surfaces. Our specific
objective is to identify these patches, together with
Figure 1: Example of a typical model exported from a CAD
system. Notice the extremely small inner angles.
the parameters of the original geometric primitives.
For each resulting primitive, a set of triangles is to be
found that represent it in the model. For CAD mod-
els, it is reasonable to expect that the vertices of the
triangles assigned to a particular patch lie almost im-
mediately on a surface defined by the primitive, only
allowing for a numerical imprecision.
A similar problem has been addressed by many
works concerning analysis, completion and refine-
ment of scanned triangle meshes. We argue that al-
though these problems are related, there are circum-
stances that make them substantially different. In par-
ticular, scanned 3D meshes usually have a relatively
uniform sampling that is dictated by the resolution of
278
Šigut, P., Van
ˇ
e
ˇ
cek, P. and Váša, L.
Analytic Surface Detection in CAD Exported Models.
DOI: 10.5220/0007396702780285
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 278-285
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
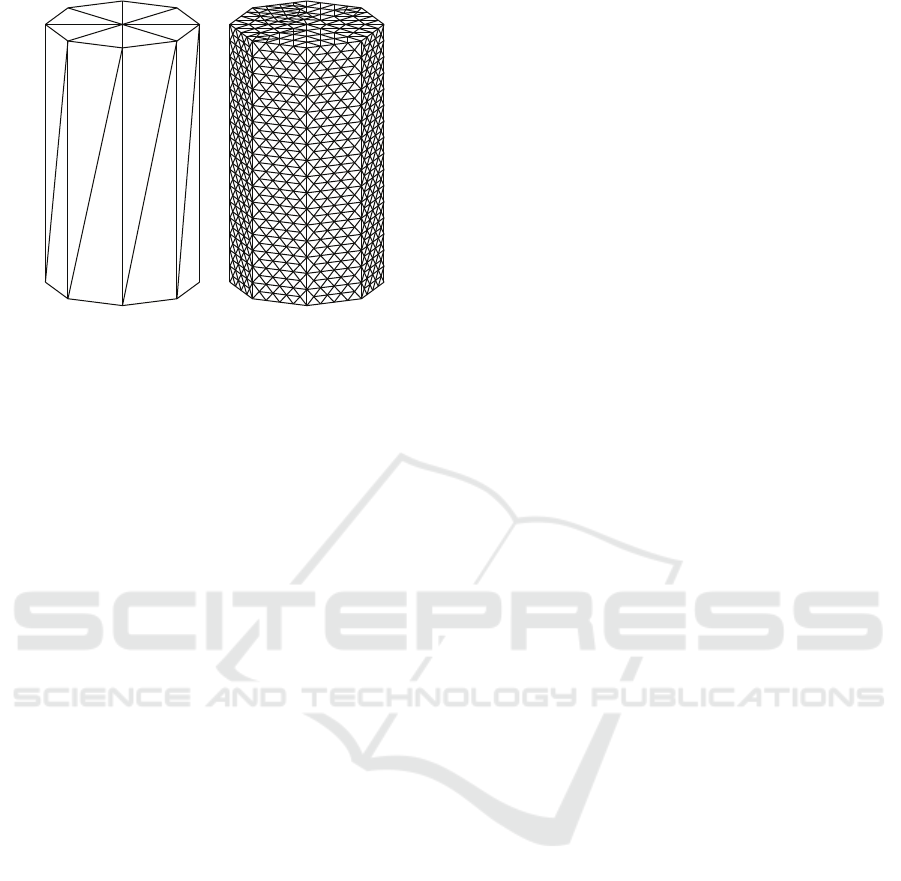
Figure 2: Cylinders are often represented by a low number
of sides (left). However, subdividing them in order to im-
prove triangle regularity is not possible, because the result-
ing shape (right) is rather interpreted as a flat sided prism
than a cylinder.
the sampling device. A CAD exported model, on the
other hand, usually has a tessellation that is minimal
with respect to the original shape. Therefore there are
many elongated triangles, and even important parts
are often represented by only a very few triangles.
Resampling a CAD exported model regularly, al-
though possible, is generally not a viable approach. A
CAD-exported model usually has all vertices exactly
(up to numerical error) lying on the analytic surfaces
used in the design process. Any resampling always
introduces additional vertices, whose position cannot
be determined so that they also lie on the actual sur-
face of the model (for illustration see Figure 2). On
the other hand, the vertex positions in scanned data
always contain noise that must be taken into account,
which is an issue that rarely occurs with CAD exports.
We have experimented with two fundamentally
different approaches to the problem at hand. First
is based on estimating principal curvatures for each
mesh vertex, which in turn allows us to classify ver-
tices as either planar, cylindrical and possibly spher-
ical. Next, continuous patches of vertices that lie on
a common plane, cylinder or sphere are created using
a region growing technique. Finally, the equation of
each segment is refined.
The curvature based approach depends strongly
on the quality of curvature estimation, which is in
turn dictated by the sampling quality that is typically
rather poor with CAD exported models. Therefore
we have experimented with another, more direct ap-
proach to the problem at hand. Basic primitives, such
as planes, cylinders, spheres and cones are fitted to
local patches of triangles. If a good fit is found, the
segment is then grown by traversing the surface. The
parameters of the representing primitives are refined
using a gradient descent based approach.
After reviewing related work in the following sec-
tion, sections 3.1 and 3.2 will discuss both approaches
in more detail. Note that although some of the de-
sign choices in the algorithm description may seem
arbitrary, we have performed extensive testing of a
plethora of variations, trying to achieve best possible
results in experiments that will be described in section
4. The algorithm flow and parameters described here
result from these experiments and provide the best re-
sults we were able to achieve by either method. Fi-
nally, section 5 will compare the two approaches and
section 6 will conclude the paper.
2 RELATED WORK
Previous work mostly addresses the problem of find-
ing analytic surfaces in dense scanned meshes, mostly
in the context of reverse engineering (V
´
arady et al.,
1997)(Benk
¨
o et al., 2001)(Benk
¨
o et al., 2002). A
bottom-up approach fitting planes, spheres and cylin-
ders has been proposed by (Attene et al., 2006). Prim-
itives are fitted to small patches first, and the patches
are merged in a greedy fashion in order to obtain
larger consistent areas.
An approach based on sampling the surface ran-
domly and searching for fitting planes, cylinders,
cones, spheres and tori has been proposed by (Schn-
abel et al., 2007). This approach has been later used
for filling in missing parts of scanned man made ob-
jects (Schnabel et al., 2009).
Another approach based on extracting and opti-
mizing boundary curves on the primitive shapes has
been proposed by (Jenke et al., 2008). The method is
primarily targeted at scanned indoor/outdoor scenes
with noise and outliers.
Fitted surfaces were also used by (Li et al., 2011)
in order to discover global relations, such as symme-
tries and parallel planes. This kind of global relations
help adjusting the parameters of the fitted surfaces and
improve the reconstruction quality.
Identifying local proxies, i.e. planar or other an-
alytical surfaces, is also a key ingredient in Vari-
ational Shape Approximation(VSA) (Cohen-Steiner
et al., 2004) and its more advanced variants (Wu and
Kobbelt, 2005). While the original VSA algorithm
only uses planes as proxies, the Hybrid Variational
Surface Approximation also allows using spheres and
cylinders as well.
The primitive fitting based approach we describe
is closely related to algorithms discussed in the litera-
ture. On the other hand, using curvatures for identify-
ing analytic patches in triangle meshes has to the best
Analytic Surface Detection in CAD Exported Models
279

of our knowledge not been thoroughly studied before.
3 ALGORITHMS
3.1 Curvature based Detection
The curvature based detection algorithm consists of
following steps:
1. Preprocessing. Mesh is cut along crease edges
and extremely long triangles are subdivided into
smaller ones.
2. Curvature Estimation. Principal curvatures are
estimated for each vertex of the preprocessed
mesh.
3. Vertex Classification. Each vertex is marked as
either planar, cylindrical or other based on the cur-
vatures.
4. Patch Creation. Continuous patches of vertices
of the same type are identified.
5. Primitive Fitting. Parameters of the correspond-
ing primitives are estimated for each patch.
6. Vertex-triangle Mapping. The primitives repre-
sented as vertex sets are transformed into sets of
triangles of the input mesh (i.e. before subdivi-
sion).
7. Postprocessing. Large primitives with a good fit
are grown to include possible neighbouring trian-
gles that also fit their equation. Small patches are
removed.
Each of these steps will be discussed in the following
paragraphs in more detail.
3.1.1 Preprocessing
First, any non-manifold edges and vertices of the
mesh are removed. Next, the continuous mesh is split
along edges where the dihedral angle is larger than
42
◦
. This threshold is chosen experimentally, based
on the knowledge that regular 8-sided prisms (45
◦
di-
hedral angles) commonly appear in CAD models, and
their sides therefore should be separated, while higher
side count usually indicates the presence of a cylinder,
where the mantle should remain continuous.
As a second step, elongated triangles are subdi-
vided. A threshold is determined based on the me-
dian edge length, and on each edge longer than the
threshold new vertices are generated. Finally, all tri-
angles incident with subdivided edges are split into
smaller triangles filling the area of the original trian-
gle. This step is necessary for the following curva-
ture estimation to succeed, however, as argued previ-
ously, global remeshing of the surface is not a viable
option. In the experiments we have performed, the
above described process provided better results than
both working with original geometry and full resam-
pling.
3.1.2 Curvature Estimation
Many approaches to estimating curvature on sampled
surface have been proposed in the literature (for a re-
cent review, see (V
´
a
ˇ
sa et al., 2016)). We have tested
multiple choices, obtaining best results using the gen-
eralized shape operator approach by Hildebrandt et al.
(Hildebrandt and Polthier, 2011). In particular, we
have used the
ˆ
S operator with radius equal to 1.6 × a,
where a is the average edge length in the triangle
mesh. This method allows us to estimate both prin-
cipal curvatures at each mesh vertex with reasonable
accuracy and robustness.
3.1.3 Vertex Classification
Next, each vertex is classified as either planar, cylin-
drical or unknown. A vertex is classified as planar,
when both its curvatures are smaller than 5% of the
average curvature over all vertices. Otherwise, a ver-
tex may be classified as cylindrical, if the ratio of the
magnitudes of the estimated principal curvatures is
larger than 10:1. Finally, if this condition is not met
either, the vertex is classified as unknown. Note that
it would be fairly easy to classify vertices as spheri-
cal by principal curvature equality, however, we did
not use this classification, since spherical segments
are rather rare in the data we have experimented with.
In contrast with that, detecting a conic vertex is gen-
erally not possible by looking only at a single vertex
and its estimated principal curvatures.
3.1.4 Patch Creation
Having a vertex classification, continuous surface
patches are generated in the next step. From each ver-
tex that is not classified as unknown, a breadth first
search is started using the mesh connectivity. Ver-
tices are added to the patch if they are of the same
type, and their estimated curvature is not too different
from that of the initial vertex. In order to evaluate the
similarity, we relate the difference in curvature to the
average curvature over all vertices of the mesh. If the
magnitude of the difference is larger than 10% of the
average curvature in either of the principal curvatures,
then the candidate vertex is deemed too different and
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
280

is not added to the growing patch. Otherwise, it is
conquered and marked as such, so that it is neither
later used in any other patch nor as initial vertex for
another search.
3.1.5 Primitive Fitting
For each patch, a corresponding primitive is fitted.
Plane fitting is done in the least squares sense. Cylin-
ders, on the other hand, are fitted by a two stage pro-
cess. First, a unit direction is found that has the small-
est dot product with all vertex normals in the patch,
by solving an eigenvalue problem resulting from the
constrained minimization. This direction is the likely
orientation of the axis of the cylinder. Next, all ver-
tices are projected along this direction, forming a set
of 2D points, which are fitted by a circle. We start
with a set of equations in the form
(x
i
− x
c
)
2
+ (y
i
− y
c
)
2
= r
2
, (1)
where x
i
, y
i
are the projected coordinates of i-th
point, x
c
, y
c
are the unknown coordinates of the center
and r is the unknown circle radius. Expanding the
equation yields
x
2
i
− 2x
i
x
c
+ x
2
c
+ y
2
i
− 2y
i
y
c
+ y
2
c
= r
2
. (2)
Subtracting an arbitrary j-th equation from all oth-
ers results in a set of linear equations of form
x
2
i
− 2x
i
x
c
+ y
2
i
− 2y
i
y
c
− x
2
j
+ 2x
j
x
c
− y
2
j
+ 2y
j
y
c
= 0,
(3)
which is solved in the least squares sense. The re-
sulting center point corresponds to the cylinder axis,
and the cylinder radius is computed as the average dis-
tance of all vertices in the segment to this axis.
3.1.6 Vertex-triangle Mapping
So far, patches of vertices are identified, our goal is,
however, to obtain triangle patches. In the mapping
step, a conversion is performed. If a vertex is assigned
to a patch, all of its incident triangles are marked as
claimed by the given patch. These triangles may be
the result of triangle splitting performed in prepro-
cessing, for each such triangle we keep the index of
the original triangle it comes from, and this triangle
is then claimed by the patch. This way, each origi-
nal triangle may be claimed three times by the same
patch, or possibly by several different patches differ-
ent number of times. Conflicts are resolved based on
the number of claims: the patch that claims a triangle
most times gets it assigned. This way, some minor
patches disappear completely.
3.1.7 Postprocessing
Since some vertices may fit into multiple patches,
some triangles may be assigned to a wrong patch at
this point, especially those on the border between
patches. As a final step, patches are sorted in order of
descending area, and grown. For each patch, neigh-
bouring triangles are considered, and the tip vertex
of each neighbouring triangle is tested for fit to the
given patch. If it is close enough to the analytic sur-
face represented by the patch, it is reassigned, unless
it is already assigned to a larger patch. If a triangle
is reassigned to a patch, its neighbours are considered
for reassignment as well.
3.2 Gradient Descent
The above described method suffers from issues re-
lated to the key component of vertex curvature esti-
mation. Therefore we have implemented a different
approach as well, building on different concepts. In
particular, we use analytic expression for squared dis-
tance from each fitted primitive. This allows us to fit
primitives to vertex sets using a gradient descent ap-
proach. The algorithm works in following steps:
1. Plane Fitting. Parameters of a plane equation are
computed for each local neighbourhood and pla-
nar regions are grown using a traversal technique.
2. Cylinder Fitting. Parameters of a cylinder equa-
tion are estimated for each local neighbourhood
and refined using gradient descent. Additional
triangles are added to the patch using a traversal
technique.
3. Cone Fitting. Parameters of a cone equation are
estimated for each local neighbourhood and re-
fined using gradient descent. Additional triangles
are added to the patch using a traversal technique.
4. Judging. Triangles that are part of multiple
patches are assigned to a single patch using a de-
cision algorithm.
Note that this approach does not use triangle sub-
division as the curvature based algorithm did, since it
is not necessary. On the other hand, splitting edges
with large dihedral angle is still performed.
3.2.1 Plane Fitting
Each triangle of the triangle mesh defines a plane.
During plane fitting, plane equation parameters are
computed for each triangle that is not yet assigned
to a plane patch. Next, using breadth first search,
neighbouring triangles are tested whether or not they
fit into the equation, and fitting triangles are added to
Analytic Surface Detection in CAD Exported Models
281

the growing patch. Patches consisting of a single tri-
angle are discarded, all others are preserved for the
final judging.
3.2.2 Cylinder Fitting
Next, a similar process is done for fitting cylinders.
Tetriamonds, i.e. quadruples of neighbouring trian-
gles, are generated starting from triangles that are not
assigned to any cylinder patch yet. For each tetria-
mond, an initial cylinder is found using the same pro-
cedure as described in section 3.1.5, only this time us-
ing triangle normals and triangle centroids instead of
vertices and their normals to estimate cylinder orien-
tation, since the triangle normals are more represen-
tative of the surface. Next, we build an analytic equa-
tion for squared distance from the cylinder surface.
Partial derivatives of this equation are computed with
respect to all cylinder parameters. Using the deriva-
tives, gradient descent is used to optimize the param-
eters of the cylinder so that it fits the vertices of the
tetriamond as closely as possible. If the final fit is
tight enough, the cylinder patch is preserved and ad-
ditional triangles are assigned to it using breadth first
search.
3.2.3 Cone Fitting
Cones are fitted in a way similar to cylinder fitting.
Normals of points lying on a cone all lie on a plane
that is orthogonal to the orientation of the cylinder
(see Fig. 3). Once again, we use triangle normals and
triangle centroids of a tetriamond consisting of trian-
gles not yet assigned to any cone. Fitting a plane to
the normals in least squares sense allows us to esti-
mate the direction of a potential cone. Average angle
between the normals and the estimated cone direction
allows us to estimate the cone angle, and combined
with the cone direction it is possible to estimate the
cone apex position.
Next, we improve the cone equation in the same
way cylinder equation has been improved. Since dis-
tance to a cone is not as straightforward as distance
to a cylinder, we describe the used formula in more
detail. Squared distance d of a point x from a cone
with apex o, unit axis direction v and tip angle α (see
figure 4) can be expressed as
d(x, o, v, α) = sin
2
(β − α) ∗ (x − o) · (x − o), (4)
where
cosβ =
(x − o) · v
kx − ok
. (5)
Figure 3: A cone with a few random surface points and their
normals (left). When the normals are brought to a common
origin (right), they all lie in a plane (dashed) that is orthog-
onal to the cone axis direction (dotted).
β
α
x
o
v
d
Figure 4: Variables in the distance from cone computation.
For the purposes of efficient computation, the first
term in equation 4 can be written as
sin
2
(β − α) = (sinβcosα − cosβsinα)
2
, (6)
where cosβ can be obtained from equation 5 and
sinβ = (1 − cos
2
β)
1
2
. Note that this expression is cor-
rect for both points inside and outside of the cone.
Equation 4 can be differentiated with respect to all
cone parameters, which allows us to use gradient de-
scent in order to reduce the squared distances of ver-
tices from the cone. Cones that fit tetriamond vertices
are grown again by a breadth first search. In contrast
with cylinders, whenever we reach a vertex that does
not fit the cone, we refine the cone parameters using
the gradient descent procedure once more, taking into
account all previously added vertices. This is neces-
sary, since the cone fitting is more prone to getting
trapped in a local minimum. Once the parameters are
refined, the previously unfit vertex is tested again and
if it fits, it is added to the patch and the search proce-
dure continues.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
282

Figure 5: A typical result of classification. Different planes
are marked in different shades of red, cylinders in green,
cones in blue. Curvature is unable to find the conic surface
and fits several cylinders instead (left), while gradient cor-
rectly fits a single cone (right).
3.2.4 Postprocessing
At this point, each triangle can be claimed by up to
three patches: a plane, a cylinder and a cone. A deci-
sion algorithm assigns each triangle to a single patch,
selecting the largest patch in terms of total number
of claimed triangles. After this step, each triangle
is assigned to a single patch. Finally, assignment is
refined by the same procedure as described in sec-
tion 3.1.7, i.e. patches are processed from largest to
smallest and possible reassignments of neighboring
vertices are considered and performed.
4 EXPERIMENTS
In order to test the performance of the two described
methods (abbreviated as curvature and gradient), we
have designed an experiment that compares the re-
sults with manually tagged data. A person that was
otherwise not involved with the development of ei-
ther method was given a set of exported CAD models.
They were requested to select groups of triangles on
each model and mark them as plane, cylinder or cone.
On each model, multiple groups could be selected,
and each group should always contain triangles that
belong to a single analytic surface. They were not re-
quired to mark all the triangles of each model, and in
areas where the classification was uncertain they were
specifically instructed not to perform marking.
In total, 95 models were marked, ranging from 12
to 80 000 triangles. In total, there were 81597 out of
225068 triangles marked in 1919 groups, out of which
1136 were plane groups, 636 were cylinder groups
and 147 were cone groups.
This data allows us to evaluate several accuracy
criteria. First, for each marked triangle, we can
check whether or not each method has assigned it to
Table 1: Percentages of incorrectly classified triangles. Av-
erage values are listed with corresponding standard devia-
tions in parentheses.
method cones on cones off
curvature 9.06% (15.22%) 3.44% (10.52%)
gradient 4.67% (12.90%) 2.85% (11.61%)
the correct primitive type. Second, for each group,
we can check whether all triangles belonging to the
group were also assigned to a single patch by each
method, and no classified patch falls into more than
one marked group.
Since the principle of the curvature based method
makes it unable to detect cones, although they appear
quite commonly in our data, we must decide how to
handle their evaluation and avoid bias towards either
method (see figure 5). There are two approaches pos-
sible, both of which we have tested:
1. for curvature, consider all triangles that were
marked as cone and classified as anything but un-
known as an error (denoted cones on).
2. turn off cone classification in gradient and ignore
all triangles marked as cone (denoted cones off ).
5 RESULTS
Table 1 lists the percentages of incorrectly classified
triangles for both methods. It shows that both meth-
ods present a viable approach to the problem at hand.
The gradient based method provides slightly better re-
sults. The considerably large values of standard devi-
ation indicate that with most models most triangles
were classified correctly (in fact, median of all per-
centages in the table is 0.0%), while there are a few
problematic cases where large error percentages oc-
cur.
Most interestingly, the Pearson correlation co-
efficient of the error percentages of the curva-
ture/gradient based methods is -0.025 for the cones on
scenario and -0.058 for the cones off scenario. This
indicates, that rather than some models being more
difficult than others, it is more likely that different
models cause problems with either method (see fig-
ure 6). A potential hybrid method that combines the
strengths of both discussed approaches could there-
fore achieve a considerable improvement of classifi-
cation accuracy.
Sometimes, it might happen that a small area of a
model is densely sampled, and if it gets incorrectly
classified, then it may skew the overall results. In
table 2 we list the percentages of marked areas that
were classified incorrectly. Interestingly, in this crite-
Analytic Surface Detection in CAD Exported Models
283

0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0% 10% 20% 30% 40% 50%
percentage of incorrect triangles,
gradient, cones on
percentage of incorrect triangles, curvature, cones on
Figure 6: Correlation of the percentage of incorrectly clas-
sified triangles by both methods.
Table 2: Percentages of incorrectly classified surface areas.
Average values are listed with corresponding standard devi-
ations in parentheses.
method cones on cones off
curvature 3.29% (9.60%) 1.66% (7.61%)
gradient 4.63% (15.63%) 4.01% (15.61%)
rion, the curvature based approach provides better re-
sults regardless of whether or not cone classification
is considered.
Additionally, we can also evaluate the consistence
of whole marked groups rather than individual trian-
gles. For each marked group, we check two fail cases:
1. Triangles of the group are part of two or more
classified patches.
2. Another marked group contains triangles classi-
fied to the same patch.
Note that the two cases are not equivalent: if a classi-
fier puts all cylinder triangles into a single patch, then
the first case does not occur, since for each marked
group, all of its triangles fall into a single classi-
fied patch. If either of these cases occurs, we mark
the group as incorrectly identified. Table 3 lists the
percentages of incorrectly identified groups for both
tested methods in both tested scenarios. Curvature
provides here substantially better performance than
gradient in terms of both average values and standard
deviation.
Finally, we have also measured the processing
speed of both methods. Both were implemented in
C# and executed on a common PC with Intel Core
Table 3: Percentages of incorrectly identified groups. Av-
erage values are listed with corresponding standard devia-
tions in parentheses.
method cones on cones off
curvature 8.45% (8.54%) 4.49% (4.54%)
gradient 10.43% (18.21%) 9.16% (17.40%)
Table 4: Per triangle processing times in milliseconds.
method mean st. dev. median
curvature 0.44 0.46 0.34
gradient 1.21 6.64 0.28
gradient cones off 0.086 0.13 0.048
i7 920 @2.67GHz processor and 12GB RAM mem-
ory. Table 4 lists the mean and median times needed
per triangle. It shows that the processing times are all
of roughly the same order of magnitude. The curva-
ture based method is faster on average than the gra-
dient based method with cone fitting turned on, note
however, that this is caused by a few extreme cases
when cone fit is recomputed many times. In more
than one half of the cases, gradient based method is
in fact faster than the curvature based method, as doc-
umented by the median. Finally, when cone fitting is
turned off, the gradient based method is considerably
faster than the two alternatives.
6 CONCLUSIONS
We have presented two approaches to identification
of analytic surfaces in CAD exported triangle meshes.
Both were thoroughly tested and tuned in order to pro-
vide the best result in an extensive experiment. One
approach is based on the commonly used gradient de-
scent paradigm, while the other uses a less common
principle of analyzing estimated principal curvatures.
The experiment results show that both methods
work roughly on par, with slight inclinations towards
either depending on how exactly one specifies the tar-
get criterion. Most interestingly, the correlation of the
results of the two methods is very weak, indicating a
certain complementarity. A hybrid method combining
the strengths of both approaches could therefore pro-
vide a considerable improvement of the performance.
Design and implementation of such method is, how-
ever, difficult, because deciding which of the methods
is more accurate in each case is a task that is in certain
sense equivalent to the overall problem itself. There-
fore we leave this question open for future research.
ACKNOWLEDGEMENTS
The authors would like to thank Jakub Va
ˇ
sta for care-
fully marking models for our research. This work was
partially supported by Ministry of Education, Youth
and Sports of the Czech Republic, project PUN-
TIS (LO1506) under the program NPU I, and Uni-
versity specific research project SGS-2016-013 Ad-
vanced Graphical and Computing Systems.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
284

REFERENCES
Attene, M., Falcidieno, B., and Spagnuolo, M. (2006). Hi-
erarchical mesh segmentation based on fitting primi-
tives. The Visual Computer, 22(3):181–193.
Benk
¨
o, P., K
´
os, G., V
´
arady, T., Andor, L., and Martin, R. R.
(2002). Constrained fitting in reverse engineering.
Computer Aided Geometric Design, 19:173–205.
Benk
¨
o, P., Martin, R. R., and V
´
arady, T. (2001). Algorithms
for reverse engineering boundary representation mod-
els. Computer-Aided Design, 33:839–851.
Cohen-Steiner, D., Alliez, P., and Desbrun, M. (2004). Vari-
ational shape approximation. ACM Trans. Graph.,
23(3):905–914.
Hildebrandt, K. and Polthier, K. (2011). Generalized shape
operators on polyhedral surfaces. Comput. Aided
Geom. Des., 28(5):321–343.
Jenke, P., Kr
¨
uckeberg, B., and Straßer, W. (2008). Sur-
face reconstruction from fitted shape primitives. In
Deussen, O., Keim, D. A., and Saupe, D., editors,
VMV, pages 31–40. Aka GmbH.
Li, Y., Wu, X., Chrysathou, Y., Sharf, A., Cohen-Or, D., and
Mitra, N. J. (2011). Globfit: Consistently fitting prim-
itives by discovering global relations. ACM Trans.
Graph., 30(4):52:1–52:12.
Schnabel, R., Degener, P., and Klein, R. (2009). Completion
and reconstruction with primitive shapes. Computer
Graphics Forum (Proc. of Eurographics), 28(2):503–
512.
Schnabel, R., Wahl, R., and Klein, R. (2007). Efficient
ransac for point-cloud shape detection. Computer
Graphics Forum, 26(2):214–226.
V
´
arady, T., Martin, R. R., and Cox, J. (1997). Reverse
engineering of geometric models - an introduction.
Computer-Aided Design, 29(4):255–268.
V
´
a
ˇ
sa, L., Van
ˇ
e
ˇ
cek, P., Prantl, M., Skorkovsk
´
a, V., Mart
´
ınek,
P., and Kolingerov
´
a, I. (2016). Mesh statistics for ro-
bust curvature estimation. Computer Graphics Forum,
35(5):271–280.
Wu, J. and Kobbelt, L. (2005). Structure recovery via hybrid
variational surface approximation. Comput. Graph.
Forum, 24(3):277–284.
Analytic Surface Detection in CAD Exported Models
285
