
Social Touch in Human-agent Interactions in an Immersive Virtual
Environment
Fabien Boucaud
1
, Quentin Tafiani
1
, Catherine Pelachaud
1
and Indira Thouvenin
2
1
Institut des Systèmes Intelligents et de Robotique, CNRS UMR 7222, Sorbonne Universités, UPMC Campus Jussieu,
75005 Paris, France
2
Laboratoire Heudiasyc, CNRS UMR 7253, Sorbonne Universités, Université de Technologie de Compiègne,
60200 Compiègne, France
Keywords: Virtual Reality, Immersive Environment, Human-agent Interaction, Immersive Room, Embodied
Conversational Agents, Social Touch, Empathic Communication.
Abstract: Works on artificial social agents, and especially embodied conversational agents, have endowed them with
social-emotional capabilities. They are being given the abilities to take into account more and more
modalities to express their thoughts, such as speech, gestures, facial expressions, etc. However, the sense of
touch, although particularly interesting for social and emotional communication, is still a modality widely
missing from interactions between humans and agents. We believe that integrating touch into those
modalities of interaction between humans and agents would help enhancing their channels of empathic
communication. In order to verify this idea, we present in this paper a system allowing tactile
communication through haptic feedback on the hand and the arm of a human user. We then present a
preliminary evaluation of the credibility of social touch in human-agent interaction in an immersive
environment. The first results are promising and bring new leads to improve the way humans can interact
through touch with virtual social agents.
1 INTRODUCTION
Anthropology has shown how touch has always been
our main modality of interaction with tools (Leroi-
Gourhan, 1964). This is still true today in the digital
era, as we can see with the addition of more and
more touch-based properties to our smartphones or
computers (Cranny-Francis, 2011).
Artificial social agents such as the embodied
conversational agents can express thoughts and
emotions as well as interpret those of their
interlocutors through more and more interaction
modalities. Touch, however, is a sense still widely
missing from social interactions between human and
agents. For many cultural as well as technical
reasons, researches on social functions of touch only
started relatively recently (Cranny-Francis, 2011).
Those recent studies show that touch is a sense with
a lot of interesting communicative functions in the
same way as other types of non-verbal
communication like gestures or facial expressions
(M. J. Hertenstein, J. M. Verkamp, A. M. Kerestes,
and R. M. Holmes, 2006). Touch is considered
especially useful for empathic communication, i.e.
the communication of emotions.
With this paper, we intend to show a way to
integrate social touch into human-agent interaction
modalities in the context of virtual reality. It is our
belief that this would enhance empathic
communication channels between human and
agents. We therefore present a system and a
preliminary study allowing us to explore the idea
that an exchange of social touches between human
and agent, with the support of appropriate facial
expressions and gestures, enables a credible
empathic communication.
2 DEFINING SOCIAL TOUCH
AND SOCIAL TOUCH
TECHNOLOGIES
2.1 What Is Social Touch?
Social touch designates all the uses of touch with so-
Boucaud, F., Tafiani, Q., Pelachaud, C. and Thouvenin, I.
Social Touch in Human-agent Interactions in an Immersive Virtual Environment.
DOI: 10.5220/0007397001290136
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 129-136
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
129

cial intentions. A salutation handshake, a tap of
encouragement in the back, or any type of non-
accidental interpersonal touch can be considered as
an example of social touch.
Works of definition and classification of social
touch (M. J. Hertenstein, D. Keltner, B. App, B. a.
Bulleit, and A. R. Jaskolka, 2006) (M. J.
Hertenstein, R. Holmes, M. McCullough, and D.
Keltner, 2009) (Bianchi-Berthouze and Tajadura-
Jiménez, 2014) are an essential source of
information to elaborate the needs of technological
systems able to produce credible social touch. These
studies show how the many different types of touch
can be defined through their physical properties and
how each type of touch can be more particularly apt
to express certain specific emotions. Those studies
also show how touch is in itself a very multi-modal
sense with characteristics as diverse as pressure,
impact velocity, speed of the touch movement on the
skin (in the event of a caress for example), total
duration of the gesture,… But even then, Hertenstein
et al. also show how these are not sufficient to
correctly interpret the communicative intention of a
touch. Touch is indeed based on the principles of
equipotentiality and equifinality. That is to say that
one unique type of touch, such as hitting someone,
can be used to express anger as well as to express
encouragement if it is used with a sport teammate
for example: this is the concept of equipotentiality.
On the other hand, two different types of touch, such
as pushing and grasping someone, can still be used
indifferently to express the same emotion of anger:
this is the concept of equifinality. This means that
other factors than the sole physical properties of a
touch must be taken into account when socially
interpreting any touch event. Among those other
factors we can name: the situation in which the
touch takes place (competitive setting, salutations,
etc.), the relationship between the person touching
and the one being touched, their respective cultures,
the part of the body that is touched, etc.
2.2 Related Works on Social Touch
Technologies
From the technical point of view, haptic
technologies (technologies producing kinesthetic or
tactile sensations) are very diverse, covering
vibration technologies, force-feedback devices or
thermal technologies and many more (M. Teyssier,
G. Bailly, É. Lecolinet and C. Pelachaud, 2017).
Pseudo-haptics, as defined by Gómez Jáuregui,
Argelaguet Sanz, Olivier, Marchal, Multon and
Lécuyer (2014), allow to give the illusion of a
credible force-feedback by using appropriate visual
cues to reinforce a simpler existing haptic feedback.
However, there are still no technology able to
completely reproduce real touch sensations on every
level. When it comes to studies on social touch,
devices such as the sleeve equipped with vibrators
TASST made by Huisman, Darriba Frederiks, van
Dijk, Heylen and Krose (2013) are often used.
In his works, Gijs Huisman (2017) differentiates
social touch mediation technologies, which focus on
transmitting touch from one human to another
through a technological interface, from social touch
simulation technologies, which generate a tactile
behaviour on their own, without human input. While
social touch simulation often use social touch
mediation technologies to produce its haptic
feedback, it also needs the “intelligence” to adapt its
behaviour and decide what kind of tactile behaviour
it should adopt, based on a decision model.
As to whether mediation and simulation of social
touch have the same properties as natural social
touch, Van Erp and Toet’s studies (2013) prove
three principles. Emotions can be transmitted
through touch only, without any other cues.
Interpersonal communication of emotion or social
intention can still be achieved through a
technologically mediated touch. Finally, systems are
also capable of using technologically mediated touch
to successfully transmit emotions, just like humans.
Although with nuanced results, it was shown
how simulated social touch enhanced empathic
communication when using augmented reality to
materialize agents in the social context of a
cooperative game (Huisman, Kolkmeier and Heylen,
2014).
Works by Yohanan (2012) on the “Haptic
Creature”, which has an animal-like appearance,
show that humans are expecting the agent to react in
a mimetic way when touched. However, there are
still very few works that have studied the agent’s
reaction to being touched when it comes to
humanoid agents.
Where most of the works we discussed here were
focused on either the agent touching the human or
the human touching the agent, our work focuses on
using a virtual humanoid embodied conversational
agent that will be able to both touch and be touched
by the user. We will measure the credibility of the
interaction throughout the whole interactive loop.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
130

Figure 1: A touch-based human-agent interaction inside
the immersive room TRANSLIFE.
3 TO TOUCH AND BE TOUCHED
IN AN IMMERSIVE VIRTUAL
ENVIRONMENT
3.1 How to Touch a Virtual Agent in
an Immersive Environment
To achieve this a priori counter-intuitive idea of
touching a virtual agent and having it be aware of
the touch, we took inspiration in Nguyen,
Wachsmuth and Kopp’s works (2007) on the tactile
perception of a virtual agent inside an immersive
room. The immersive room system produces an
immersive environment of virtual reality through the
projection of the 3D environment on each of the
three walls and the floor it is made up of. This,
coupled with motion capture cameras and the use of
stereoscopic 3D glasses, allows the user to
experience the environment to the 1:1 scale (Cruz-
Neira, Sandin and DeFanti, 1993). This very specific
setup allows the user to experience a virtual
environment while still being able to see and
perceive his own body (unlike with most of the
head-mounted displays for virtual reality). The user
will be able to see himself touch the agent with his
own hand and be touched on his own arm.
To make the agent able to perceive touch,
Nguyen et al. idea is to cover the 3D model of the
virtual agent with a virtual “skin” made up of
“tactile cells”, which are virtual receptors put on the
surface of the body of the agent and taking the form
of geometries varying in size and shape. When any
element of the real world tracked in the immersive
room is detected as colliding with any of the cells,
through comparison of coordinates, we consider that
there is touch and we can record its different
properties, such as location on the body. This allows
to make the agent aware of when it is being touched.
Basing ourselves on these ideas we gave
colliders to the 3D model of our virtual agent to
reproduce the principle of Nguyen et al.’s skin
receptors. These colliders can be seen in Figure 2.
Upon collision with the virtual representation of the
hand, we record the cell that was touched but also
properties such as the duration of the touch, the
initial velocity of the hand when the touch occurred,
etc. This is done every time a tactile cell is activated
and we can build a sequence of touches that will
represent the whole touch gesture.
Figure 2: The virtual environment with the agent and its
tactile cells (in green).
Without physical embodiment though, our hand
will still go through the visual representation of the
agent without resistance. It is thus very difficult to
measure physical properties such as pressure or to
perform types of touch such as holding the arm.
3.2 How to Be Touched by a Virtual
Agent in an Immersive
Environment
To make touching and being touched by our virtual
agent a credible experience, we can’t satisfy
ourselves with only seeing our hand colliding with
and go through the body of the agent. Our
interactions with reality are based on our habits of
perceiving the world through our senses. When we
see our hand coming into contact with something,
we are always expecting to feel touch. If that
sensation was missing when touching the agent,
there would be perceptive dissonance, which would
produce discomfort and a loss of credibility of the
interaction. In order to give the user a substitute
sensory feedback able to compensate perceptively
the immaterial nature of the virtual body, we turned
ourselves towards the design and creation of a sleeve
and a glove able to perform haptic feedbacks. Those
two devices are required to simulate the touch of the
Social Touch in Human-agent Interactions in an Immersive Virtual Environment
131

agent on the human (sleeve) and to offer a suitable
perceptive substitution when the human touches the
agent (glove).
4 DESIGNING HAPTIC
INTERFACES
In order to implement haptic feedback for the user,
we designed an interface composed of two devices:
a glove equipped with four vibrators (similar to the
ones we can find in a smartphone in terms of size
and power) on each corner of the palm of the hand,
and a sleeve using the same vibrators in the shape of
a matrix of two columns and four lines of those
vibrators. The arm and the hand are privileged
places for social touch, where it is generally well
received even between strangers (Suvilehtoa,
Glereana, Dunbarb, Haria and Nummenmaa, 2015).
We chose to use vibrations for its lightweight,
making it easy to wear on the body, as well as for
the richness of the scientific literature on how we
can use them to produce interesting haptic sensations
(Huisman et al., 2013). Despite their inherent
limitations when it comes to reproducing human
touch sensation, we used the principles of the tactile
brush algorithm (Israr and Poupyrev, 2011) on the
sleeve and achieved the simulation of four different
types of touch by manipulating duration and
intensity levels of the vibrations. Those four types of
touch were based on Hertenstein et al. (2006) (2009)
categorization of the types of touch and were chosen
for their ability to transmit different emotions. Those
types of touch are hitting, tapping, stroking and what
we will call a neutral touch. We defined the physical
properties of those touches as follow:
- A hit is a short touch (400 ms) without any
movement and with a high intensity.
- A tap is a very short touch (200 ms) without any
movement and with a moderate intensity.
- A stroke is a longer touch (4*200 ms) with a
movement on the skin and with a lower intensity.
- A neutral touch is a longer touch (1000ms) without
any movement and with a lower intensity.
As natural human touch has much more physical
properties than the few we can take into account
with vibrations, some types of touch can’t be
reproduced with those devices, such as any type of
touch using pressure. Nevertheless, we believe that
those four types of touch can be simulated in a
satisfactory way by vibrations and suffice to produce
an understandable haptic feedback for the user.
To prevent another perceptive dissonance, the
gesture visually performed by the agent also had to be cor-
rectly synchronized with the vibrations. The
prototype of the sleeve built for our system can be
seen in Figure 3 and makes use of the Arduino
technology.
We will now present the preliminary study
conducted to make a first evaluation of the system.
Figure 3: The sleeve prototype.
5 PRELIMINARY STUDY
With this first experiment, we aim to produce a
preliminary study on the credibility of simulated
social-touch based interactions between human and
agent in our immersive room TRANSLIFE. This
will also serve as an evaluation of the system we
built and presented in the previous sections.
5.1 Experimental Protocol
This preliminary experiment is split in two distinct
phases in which the participant will have to touch
and be touched by a virtual agent. A between subject
design was chosen in order to prevent fatigue (the
experiment being already quite long) as well as any
bias based on the participant learning from the
phases. Participants are thus divided in three groups
depending on the emotion they have to transmit and
the emotion being transmitted to them by the agent.
Before the beginning of the experiment, in order
to reduce the novelty effect, the participant is put in
a test environment which allows him to familiarize
himself with the virtual environment, the haptic
feedbacks and a different virtual agent than the one
used in the rest of the experiment.
The actual environment (see Figure 2) is then
launched and the participant is asked to get the
attention of the agent, who is first turned away from
the participant, by placing himself on the white
marking and touching the agent. The agent then
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
132

turns around and proceeds to introduce itself as
Camille and explains the experiment.
Phase 1. The participant will first express an
emotion by touching the agent with the vibratory
glove, and the agent will answer to the touch and the
emotion transmitted with an adequate facial
expression. Practically, the participant touches the
agent four times and is left free to use any touch type
he considers appropriate, while being warned that
only his hand is recognized by the system.
During this phase, emotional scenarios will first
be read to the participant in order to indicate the
emotion that must be transmitted and its intensity to
the participant. There are two sessions of four
touches in which the same emotion is being
transmitted but each session is preceded by a
different scenario indicating a different intensity of
the emotion. Our goal in using two distinct
emotional intensities is to observe and determine if
the participant uses different kinds of touch. Three
emotions were chosen to be transmitted, they are
sympathy (C1), anger (C2) and sadness (C3). Those
emotions benefit from being very different from
each other while being a priori easily understandable
for the participants. Emotional scenarios are based
on works by Bänziger, Pirker and Scherer (2006)
and by Scherer, Banse, Wallbott and Goldbeck
(1991). As an example, the following low emotional
intensity scenario was used to indicate sympathy:
“You meet a friend of yours, Camille, that you
hadn’t seen for some time. You express what you
are feeling to her.” High emotional intensity
scenarios involve more emphatic adjectives and
expressions.
Phase 2. Still inside the room, the virtual agent
will then touch the participant where the vibratory
sleeve is worn, while performing facial expression
and gesture adequate to the emotion being
expressed. The emotion being expressed is different
from the one expressed in the previous phase to
prevent any kind of learning bias (future works
should beware order bias though).
There are also two sessions of four touches in
this phase, and it is the same emotion that is being
expressed in both phases but this time it is the type
of touch that changes between the sessions. The
agent uses stroking and tapping to express sympathy
while tapping and hitting are used for anger, and
stroking and neutral touch are used for sadness.
As said before, physical properties of touch are
not sufficient for the correct interpretation of social
touch. We chose to add other non-verbal cues, facial
expressions and gestures corresponding to the
emotions being transmitted, so that we can evaluate
if this setting is already sufficient to the
interpretation of touch.
In-between each session of the experiment and at
the end, the participant is asked to answer some
questions from the questionnaire. At the very end,
after having answered the questionnaire, the
participant is debriefed about the experiment.
5.2 Setup and Questionnaire
In this setup, we are using a wizard-of-oz type of
procedure where the reactions of the agent are
prepared in advance and activated by the person
conducting the experiment.
The agent is monitored and animated through the
use of the GRETA software platform (De Sevin,
Niewiadomski, Bevacqua, Pez, Mancini, Pelachaud,
2010), which allows us to manage the social
behaviour of such agents both in terms of verbal and
non-verbal cues.
As for the questionnaire, it is inspired by works
by Demeure, Niewiadomski and Pelachaud (2011).
In the first phase, participants are asked to describe
the properties of the types of touch they chose to
use, so that we can confront the answers to the
information recorded by the system as well as to the
results from the literature. The participants are also
asked to evaluate the degree to which they
considered the reaction of the agent to their touch as
credible and why. We understand credibility here as
the degree to which the participant feels the agent
behaved itself in an adequate human-like way.
In the second phase, participants are asked to
describe the tactile sensation they felt when the
agent touched them and to name it. Finally,
participants were asked to determine to what degree
they felt like the agent was expressing sadness,
anger or sympathy, or any other kind of emotion
they believed they had felt, and to evaluate to which
degree they considered the behaviour of the agent as
credible and why.
5.3 Participants
The experiment, which lasted one hour on average,
was conducted with twelve participants, among
which there were eight women and four men. Nine
of those participants had no prior experience of
virtual reality. Ten considered themselves as having
a good touch receptivity (they thought they received
touch well) and two didn’t know. All the participants
were between 18 and 39 years old and were of
occidental culture. Mean age value was 23,25 and
standard deviation was approximately 5,7897.
Social Touch in Human-agent Interactions in an Immersive Virtual Environment
133
6 RESULTS
Subjective data was gathered with 5-items Likert
scales. Since we had very few participants (twelve
split in three groups of four), conducting future new
experiments with more participants and improved
procedures should allow to confirm or infirm the
following elements.
6.1 Touching and Being Touched
All of the participants that had to transmit sadness
through touch expressed a big difficulty to decide
how to touch the agent for this emotion.
Unexpectedly, and even though they had been
clearly informed that only the glove was tracked and
taken account for their touch on the agent, all the
participants used a type of touch that we considered
as inadequate to virtual reality at least once. In the
case of sympathy and sadness most of the
participants tried to hug the virtual agent.
Seven out of the eight participants concerned
recognized correctly, by name, the vibration pattern
that corresponded to a stroking, and more than half
of the participants concerned could identify the
patterns that simulated both the hit and the tap.
However, no participant identified the “neutral
touch”, which could be explained by the fact that
“neutral touch” might not be a natural term.
6.2 Overall Credibility of the Touch
Interaction and the Agent’s
Behaviour
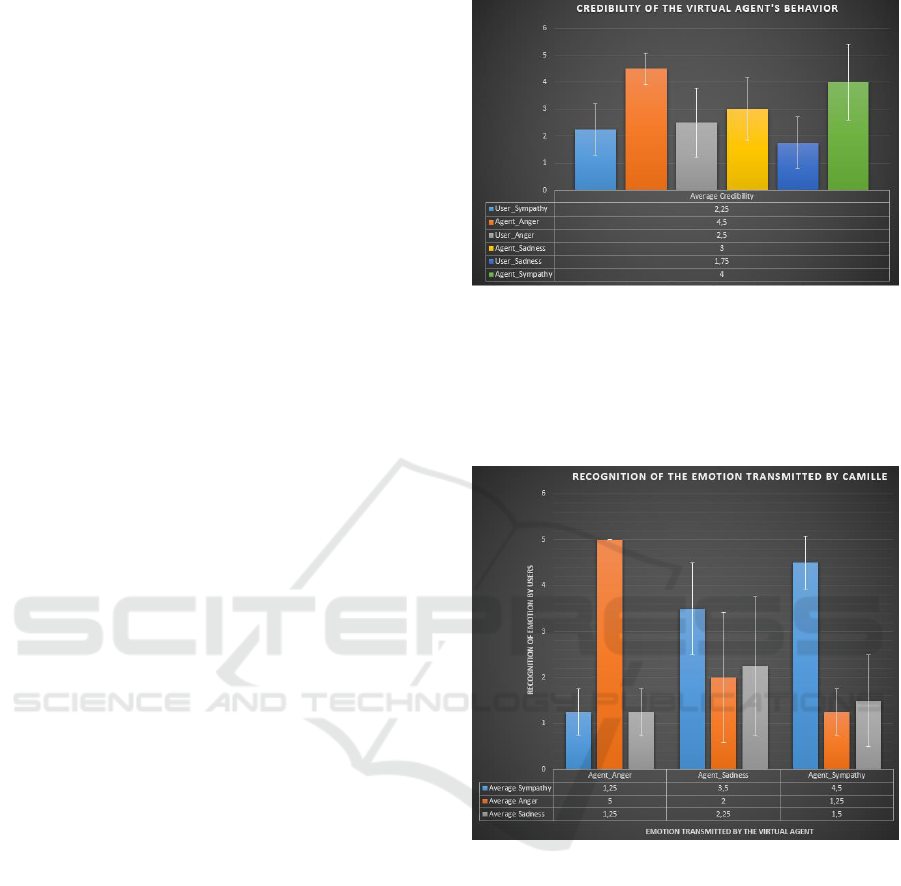
The results shown in Figure 4 (User stand for when
the participant touched the agent and Agent stands
for when the agent touched the participant) indicate
that the agent appeared as more credible when it
touched the participants to express anger (red
column) and sympathy (green column), with the
participants rating its credibility around or above 4
on average. The agent was however much less
credible when it reacted to being touched or when it
tried to express sadness. In their answers to the
questionnaire, participants have said that facial
reactions were hardly noticeable when they touched
the agent, which can partly explain the low
credibility of the agent when it was being touched.
The results shown in Figure 5 indicate that
the emotion transmitted by the agent was correctly
recognized as anger in group C1 and as sympathy in
group C3 by almost all the participants, but that the
group that was confronted to sadness had a lot more
Figure 4: Credibility of the virtual agent’s behaviour
according to participants.
trouble to correctly identify the emotion. We can add
that half of the participants from group C2 have said
that the agent was trying to comfort them or to be
compassionate instead of expressing sadness.
Figure 5: Recognition rate of the emotion transmitted by
the agent.
6.3 Discussion
Despite their overall obviously low significance
considering the number of participants, we believe
the answers support the idea that social touch is a
viable modality to enhance empathic communication
channels between human and agent. It notably
shows how agents using touch to express emotions
can be considered as credible by humans. Results are
less encouraging when it comes to the credibility of
the reaction of the agent to touch. This means that
the agent was not perceived as having noticed the
touch performed on itself by the participants, or that
its reaction was not felt human-like. However, we
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
134

believe that this is something that can be improved
by enhancing the quality of the other reaction cues
of the agent (speech, gestures and especially facial
expressions) and by the implementation of a real
computational model of emotion that would allow
the agent to have a full and autonomous interaction.
Another interesting result is that sadness was
poorly recognized and felt hard to transmit through
touch. When asked about it, participants said that
when they feel sad they are more expecting to be
touched by someone else (in order to be comforted
or shown empathy) than they are prone to go touch
someone. It thus appears that an emotion such as
being sorry-for someone would be more appropriate
in a social touch context than sadness in itself.
It is also noteworthy that even though results
were very encouraging about the recognition rate of
the types of touch simulated with the sleeve, all the
participants have expressed that they didn’t feel like
vibrations were an appropriate feedback for
imitating the natural touch sensations.
Despite this, participants have unexpectedly not
hesitated to use types of touch that we had thought
inadequate in the context of virtual reality, such as
hugging or pushing, all of those being types of touch
requiring some kind of physical resistance from the
object being touched. While participants absolutely
realized that only their hand was detected and
received haptic feedback, they still tried to use the
types of touch that seemed the most natural to them
to express the emotion they had to express.
When asked what kind of perceptive substitution
they would have preferred, participants described
force-feedback devices. Such devices could indeed
give a more realistic sensation of touching
something with a physical presence.
Among the other possibilities that can be
explored, one of the participant remarked that the
vibratory sensation might have seemed less
surprising and more credible if there had been some
sort of mediation of the touch and the vibratory
feedback through some kind of physical tool, such as
a HTC Vive controller or any other command device
of this kind, instead of the glove. It seemed to the
participant that such a proxy would have made the
vibrations feel less dissonant, since it would have
used a tool that doesn’t look like it aims at perfectly
imitating the sensation of natural touch.
This idea seemed particularly interesting to us
considering that social touch is overall a rarely used
social interaction modality in our daily-lives (at least
outside ritualistic usages and more intimate
relationships), but is, on the other hand, our main
modality of interaction with technical objects and
tools. André Leroi-Gourhan (1964) has shown how
by becoming bipeds and thus freeing their hands, our
main touching organs, the first humans have been
able to develop themselves technically and
cognitively through the handling of external tools.
Using some kind of proxy to mediate our touch in a
virtual environment could therefore be a relevant
and interesting way to produce a credible social
touch sensation even with a sensory feedback very
different from the actual sensation of touch. In the
context of virtual reality, such a mediation coupled
with pseudo-haptics could greatly enhance the
quality of the perceptive substitution.
The question remains as to what kind of
mediation tool could be relevant in the context of
virtual reality. How using such a proxy would
influence the behavior of the human towards the
agent also needs to be studied with more attention,
as it could potentially put distance between them.
7 CONCLUSIONS
To sum things up, our goal was to estimate in what
measure credible social interactions based on touch
can be implemented between human and embodied
conversational agent in a virtual immersive
environment. With the system and the preliminary
experiment presented in this paper, we hope to have
shown that a credible empathic communication
between human and agent can indeed be performed
with the use of simulated social touch based on
vibrations. In particular, we have shown how
patterns of vibrations can be recognized as specific
types of touch and how emotions transmitted
through a combination of touch and facial
expressions can also be identified by humans in an
immersive virtual environment. Leads on how to
improve both the system proposed here and the
evaluation protocol have been identified and should
allow to pursue new studies on touch-based human-
agent social interactions in immersive virtual
environments.
However, our agent doesn’t meet, yet, all the
requirements mentioned in the literature (Huisman,
Bruijnes, Kolkmeier, Jung, Darriba Frederiks et al,
2014) that would make it qualify as an autonomous
social agent. If it has the ability to perceive and to
perform touch, it still lacks the intelligence to
interpret the touches and to adapt its behavior
accordingly. With an adequate computational model
of emotion, a maintained exchange of social touches
between human and agent could happen.
Social Touch in Human-agent Interactions in an Immersive Virtual Environment
135

ACKNOWLEDGEMENTS
This work was realized thanks to the ANR’s funding
in the context of the Social Touch project (ANR-17-
CE33-0006). We also thank the FEDER and the
Hauts de France for their funding of the immersive
room TRANSLIFE at UMR CNRS Heudiasyc Lab.
REFERENCES
T. Bänziger, H. Pirker, and K. Scherer. 2006. “GEMEP-
Geneva Multimodal Emotion Portrayals: A corpus for
the study of multimodal emotional expressions”. In
Proceedings of LREC.
N. Bianchi-Berthouze, and A. Tajadura-Jiménez. 2014.
“It’s not just what we touch but also how we touch it”.
In Paper presented at the TouchME workshop, CHI
Conference on Human Factors in Computing Systems.
Anne Cranny-Francis. 2011 Semefulness: a social
semiotics of touch, Social Semiotics, 21:4, 463-481,
DOI: 10.1080/10350330.2011.591993
Carolina Cruz-Neira, Daniel J. Sandin and Thomas A.
DeFanti. "Surround-Screen Projection-based Virtual
Reality: The Design and Implementation of the
CAVE", SIGGRAPH'93: Proceedings of the 20th
Annual Conference on Computer Graphics and
Interactive Techniques, pp. 135–142,
DOI:10.1145/166117.166134
V. Demeure, R. Niewiadomski and C. Pelachaud. 2011.
“How is Believability of Virtual Agent Related to
Warmth, Competence, Personifiation and
Embodiment?”. In Presence (pp. 431-448).
Jan B. F. van Erp, and Alexander Toet. 2013. “How to
Touch Humans Guidelines for Social Agents and
Robots that can Touch”. In Human Association
Conference on Affective Computing and Intelligent
Interaction.
D.A. Gómez Jáuregui, F. Argelaguet Sanz, A.H. Olivier,
M. Marchal, F. Multon, A. Lécuyer, 2014. "Toward
“Pseudo-Haptic Avatars”: Modifying the Visual
Animation of Self-Avatar Can Simulate the Perception
of Weight Lifting", IEEE Transactions on
Visualization and Computer Graphics (Proceedings of
IEEE VR 2014), pp.654-661.
M. J. Hertenstein, J. M. Verkamp, A. M. Kerestes, and R.
M. Holmes. 2006. “The communicative functions of
touch in humans, nonhuman primates and rats: A
review and synthesis of the empirical research”. In
Genetic, Social, and General Psychology
Monographs.
M. J. Hertenstein, D. Keltner, B. App, B. a. Bulleit, and A.
R. Jaskolka. 2006. “Touch communicates distinct
emotions”. In Emotion.
G. Huisman. 2017. “Social Touch Technology: A Survey
of Haptic Technology for Social Touch”. In IEEE
Transactions on Haptic.,10(3), pp. 391-408.
DOI:10.1109/TOH.2017.2650221
Gijs Huisman, Merijn Bruijnes, Jan Kolkmeier, Merel
Jung, Adu´en Darriba Frederiks, et al.. 2014.
“Touching Virtual Agents: Embodiment and Mind.”
Yves Rybarczyk; Tiago Cardoso; Jo˜ao Rosas; Luis
M. Camarinha-Matos. 9th International Summer
Workshop on Multimodal Interfaces (eNTERFACE),
Jul 2013, Lisbon, Portugal. Springer, IFIP Advances in
Information and Communication Technology, AICT-
425, pp.114-138, Innovative and Creative
Developments in Multimodal Interaction Systems.
Huisman, Gijs and Darriba Frederiks, Aduen and van
Dijk, Betsy and Heylen, Dirk and Krose, Ben, 2013
“The TaSST: Tactile Sleeve for Social Touch”. IEEE
World Haptics Conference 2013, 14-18 April,
Daejeon, Korea.
G. Huisman, J. Kolkmeier, D. Heylen. 2014. “With Us or
Against Us: Simulated Social Touch by Virtual Agents
in a Cooperative or Competitive Setting”. In
International Conference on Intelligent Virtual
Agents.
Ali Israr and Ivan Poupyrev. 2011. “Tactile Brush:
Drawing on Skin with a Tactile Display”. Disney
Research Pittsburgh.
Leroi-Gourhan, André. 1964. Le geste et la parole. Paris,
A. Michel. Tome I: Technique et langage. 325 p.
N. Nguyen, I. Wachsmuth, and S. Kopp. 2007. “Touch
perception and emotional appraisal for a virtual
agent”. In Proceedings Workshop Emotion and
Computing.
K. R. Scherer, R. Banse, H. G. Wallbott, T. Goldbeck.
1991. “Vocal cues in emotion encoding and
decoding”. In Motivation and Emotion.
E. de Sevin, R. Niewiadomski, E. Bevacqua, AM. Pez, M.
Mancini, C. Pelachaud. 2010. « Greta, une plateforme
d'agent conversationnel expressif et interactif ». In
Technique et Science Informatique.
J. T. Suvilehtoa, E. Glereana, R. I. M. Dunbarb, R. Haria,
and L. Nummenmaa. 2015. “Topography of social
touching depends on emotional bonds between
humans”. In National Academy of Sciences.
M. Teyssier, G. Bailly, É. Lecolinet, C. Pelachaud. 2017.
« Revue et Perspectives du Toucher Social en IHM ».
In AFIHM. 29ème conférence francophone sur
l’Interaction Homme-Machine.
Yohanan, S., 2012. "The Haptic Creature: Social Human-
Robot Interaction through Affective Touch," Ph.D.
Thesis, University of British Columbia.
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
136
