
Lane Detection and Scene Interpretation by Particle Filter in Airport
Areas
Claire Meymandi-Nejad
1,2
, Salwa El Kaddaoui
1
, Michel Devy
1
and Ariane Herbulot
1,3
1
CNRS, LAAS, Toulouse, France
2
INSA de Toulouse, Toulouse, France
3
Univ. de Toulouse, UPS, LAAS, F-31400 Toulouse, France
Keywords:
Lane Detection, Inverse Perspective Mapping, Particle Filter, Polygonal Approximation, Aeronautics.
Abstract:
Lane detection has been widely studied in the literature. However, it is most of the time applied to the automo-
tive field, either for Advanced Driver-Assistance Systems (ADAS) or autonomous driving. Few works concern
aeronautics, i.e. pilot assistance for taxiway navigation in airports. Now aircraft manufacturers are interested
by new functionalities proposed to pilots in future cockpits, or even for autonomous navigation of aircrafts in
airports. In this paper, we propose a scene interpretation module using the detection of lines and beacons from
images acquired from the camera mounted in the vertical fin. Lane detection is based on particle filtering and
polygonal approximation, performed on a top view computed from a transformation of the original image. For
now, this algorithm is tested on simulated images created by a product of the OKTAL-SE company.
1 INTRODUCTION
A lot of studies have been conducted in the automo-
tive domain on computer vision, in order to perform
scene interpretation required to provide reliable in-
puts for automatic driving or driver assistance, etc. As
such, the detection of road surface markings has been
thought of as a key factor for road and lane tracking
from a vehicle. Lane detection and road analysis are
currently used in driver assistance systems and pro-
vide multiple advantages. Lane detection is the main
element used for road modelling, intelligent driving,
vehicule localization or obstacle detection.
Two main types of methods are commonly used
for lane detection: model-based and feature-based
methods. Model-Based methods, often defined for
vehicule friendly roads, either on highways or on ur-
ban streets, are based on strong models: camera pa-
rameters, width and curvature of the road, position of
the vehicule with regards to the scene elements (Asif
et al., 2007), (Deng et al., 2013), (Loose and Franke,
2010), number of road lines (Chapuis et al., 1995),
etc. Prior knowledge is necessary to build the road
model as they allow to predict where road surface
markings could be in images, but it must be upda-
ted with measurements extracted from these images.
These models present better robustness but require
more computational resources and strong assumpti-
ons on the scene geometry. Feature based-methods
use a combination of low level features such as co-
lor models, contrast, shape, orientation of groups of
pixels and so on. They are of lower computatio-
nal complexity compared to model-based methods,
which is an advantage when dealing with real-time
systems (Sun et al., 2006), (Lipski et al., 2008), (Hota
et al., 2009). However, these techniques may fail in
case of shadowing or occlusions which is prompt to
happen when dealing with obstacle detection.
Less studies have been devoted to scene interpre-
tation in aeronautics, when considering aircraft na-
vigation on taxiways (Theuma and Mangion, 2015),
(Tomas et al., 2017). Road models differ from airport
ones (gates, taxiway, runway) which also are complex
and varying environments requiring a frequent update
of their models. This paper proposes a scene inter-
pretation method based on weak models exploited to
detect taxiway horizontal markings and beacons. We
use a combination of observations and prior know-
ledge of the scene to approximate the complex functi-
ons describing the ground line shapes with a set of
pre-selected samples (Sehestedt et al., 2007), (Jiang
et al., 2010).
Assuming the airport is a local 2D environment, a
top view image is first computed by an Inverse Per-
spective Mapping (IPM) transformation, applied to
raw images acquired from a camera mounted in the
Meymandi-Nejad, C., El Kaddaoui, S., Devy, M. and Herbulot, A.
Lane Detection and Scene Interpretation by Particle Filter in Airport Areas.
DOI: 10.5220/0007406105170524
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 517-524
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
517

Figure 1: Functions for interpretation of airport scenes.
aircraft vertical fin. Different observation maps are
then created from this top view, and used by a particle
filter for the detection of lines. The use of the particle
filter is motivated by the need to implement a proba-
bilistic method instead of a deterministic one, as we
work on weak models. Clusters of points are collected
from the particle filter, arranged and merged to deter-
mine the line equations by polygonal approximation.
Other elements such as beacons are detected on the
taxyway in the same way, and added to the detected
lines to produce an augmented reality view of the tax-
iway.
The next section describes different functions in-
tegrated in our scene interpretation module. Results
are presented in the section 3, while contributions and
current works are summarized in the section 4.
2 METHODS
The different functions described in this section are
shown on Figure 1: they currently aim at building an
augmented view to be displayed in the cockpit; the
scene representation will be used later for alerting the
pilot if a risky situation is detected, or for autonomous
navigation of the aircraft on taxiways.
2.1 Inverse Perspective Mapping (IPM)
As presented in (Deng et al., 2013), the scene can be
presented, in the Euclidian space, either in the world
coordinate system or in any chosen image coordinate
system. We decided to use a top view transformation
by applying an Inverse Perspective Mapping to our
frame. The coordinate systems used are illustrated in
Figure 2.
Figure 2: Representation of the camera coordinate system
(blue) and IPM coordinate system (red).
Providing that we define a point in the world coor-
dinate system (respectively in the image coordinate
system) by the following coordinates P
W
(X
W
, Y
W
, Z
W
)
(respectively P
C
(X
C
, Y
C
, Z
C
)), we will note any trans-
formation in the world to camera coordinate system
process P
W /C
(X
W /C
, Y
W /C
, Z
W /C
). The expression of
a point in the camera coordinate system is expressed
in Equation 1.
P
C
= [R
1
R
2
R
3
].P
W
+t (1)
R
1
, R
2
and R
3
represent the rotation between the two
coordinate systems in the three dimensions while t is
the translation part of the movement. P
C
can also be
defined as in Equation 2
P
C
= [X
W /C
Y
W /C
Z
W /C
].P
W
+ 0
W /C
(2)
The homography H needed to change from the world
coordinate system to the image coordinate system can
be found in Equation 3. As we project the image on
the ground to create a top view, the Z
W /C
is not taken
into account. The homography used in our algorithm
can be found in Equation 4, where K is the intrinsic
matrix of the camera, D is the height of the camera
in relation to the ground and θ correspond to the tilt
value of the camera.
H = K.[X
W /C
Y
W /C
0
W /C
] (3)
H = K.
−1 0 x
1n
0 sin(θ) D.cos(θ)
0 −cos(θ) D.sin(θ)
(4)
To compute an IPM image adapted to our specificati-
ons, we perform a discretization of the image where
the dimensions of one cell are defined as (δX, δY ).
This permits to describe the coordinate (i, j) of each
pixel in the IPM image in relation to its (X ,Y ) coor-
dinates in the image coordinate system. Equation 5
links the (i, j) and (X ,Y ) coordinates, where D
i
and
D
j
are the size of the IPM frame. The intensity of the
(i, j) cell is interpolated from the value of the (u, v)
cell in the image. The link between the (i, j) and
(u,v) coordinate is despicted in Equation 6. The Fi-
gure 3 exposes the IPM process. Results of the IPM
are presented in Figure 4. All the following image tre-
atments will be applied to the resulting image shown
in Figure 4(b).
i
j
1
=
0 1/∆Y D
i
−1/∆X 0 D
j
/2
0 0 1
.
X
Y
1
(5)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
518

v
u
j
i
Y
X
IPM image
Normal image
H
Figure 3: Creation of IPM frame from camera frame.
s.
u
v
1
= H.
X
Y
1
(6)
(a) (b)
Figure 4: (a) Original image, (b) IPM transformation.
2.2 Weighted Maps Computation
The transformed IPM image is used to create several
maps. The goal of these maps is to compute a weight
for each pixel before launching a particle filter on the
IPM image, for lane detection. The weight of a pixel
will increase as it is closer to the reference color of the
object to detect and its belonging to a detected border
of the object.
2.2.1 Edge Map Computation
Our algorithm uses two types of edge maps. One is
used to detect any border in the image whereas the
other is mainly based on the lane analysis. Combined,
they offer varied information.
The first map is created by using the Sobel gra-
dient on the image intensity. The IPM image obtained
in Figure 4(b) is converted into a grayscale image and
a Sobel gradient is performed on the created image.
An exponential treatment is then applied to the re-
sult values in order to increase the contrast between
Figure 5: Edge map - Sobel Gradient.
black and white pixels. Figure 5 is an example of the
provided map where the blurry effect is created by
our exponentional treatment. The exponential para-
meters are chosen with regards to our data to express
the noise in the measurement and confidence in the
measurement. The second edge map is based on the
model of a lane and a method proposed by (Bertozzi
and Broggi, 1998). In the aviation field, specifications
are numerous and common to all airports. The sizes
of the lanes that can be found in an airport are regu-
lated. We use the knowledge of the lane size for this
edge detection. The IPM frame is first converted in
the HSV (Hue, Saturation, Value) color-space, where
we select the saturation channel. The yellow color of
the lanes becomes much more expressive in this re-
presentation. Based on the knowledge of the road,
our algorithm skims the resulting image of the satu-
ration channel in order to create a binary version of
the image. Each pixel is compared to its left and right
neighbors, in terms of saturation value and a threshold
is fixed to discriminate the pixels belonging to a lane
from the others. Once this binarization is computed,
we apply a distance transform, based on the algorithm
described by (Felzenszwalb and Huttenlocher, 2012)
and implemented in OpenCV, to the image obtained.
The result of this treatement is shown in Figure 6.
The map created thanks to the Sobel gradient ena-
bles our algorithm to detect geographical informati-
ons such as borders between the tarmac and the grass
or beacons. It can help to create a model of the scene
and filter false positive detections. The second map
is focused on the known size of the main lane to fol-
low in an airport and reduce the number of borders
to examine. To detect only a lane, we will use the
second map whereas the beacons and tarmac delimi-
tations are computed with the first map.
Using the Sobel Gradient map combined with the
Lane Detection and Scene Interpretation by Particle Filter in Airport Areas
519

Figure 6: Edge map - Lane model.
second map could be efficient for double checking as
the size of the lane can vary with partial occlusion
or curvy parts but the combination of the two maps
increase the computation time. We know that when
the lane becomes curvy, its apparent size in the IPM
image can be reduced and the lane might not be de-
tected by our algorithm. This is why we apply tre-
atments to the second map, to add noise in order to
simulate our confidence in the measurement and in-
crease the detection rate.
2.2.2 Color Map Computation
The color of the various lanes that can be encounte-
red are regulated and defined in specific range of yel-
low and white. We can use these specifications in our
model, to create a map of similarity between the co-
lor of a pixel and the reference color. To ensure that
the algorithm is more robust to wheather phenome-
nons such as shading, we compute the color map in
the LAB color-space. A patch of reference color is
defined in the LAB color-space and our algorithm ap-
plies a convolution between this patch of the reference
color and the color IPM image (see Figure 4(b)) in or-
der to determine a distance between the two patches
of pixels, based on the A and B channels. Figure 7
shows the resulting color map.
2.2.3 Global maps computation
We combine the Edge and Color maps defined above
to create a measure map. A value is attributed to
each pixel and represents the multiplication of a color
weight by the edge weight, computed thanks to the
two previous maps. A specific exponential treatment
is applied to the color and edge weights to increase the
contrast between a pixel belonging to a lane and the
others. We also create a binarized version of this map
Figure 7: Color map.
(a) (b)
Figure 8: (a) Weights map, (b) Binarized map.
used for the particle initialization while the weights
will be used for the particle survival estimation. The
results are presented in Figure 8, where it can be seen
that most of the additional noise brought by the edge
map is filtered by the use of a combination of the two
maps, which increase the accuracy of the particle fil-
ter and reduce the computation time.
2.3 Particle Filter
2.3.1 Particle Initialization
As explained in the introduction, we decided to use
a particle filter for the lane detection, using the
bootstrap filter or Sequential Importance Resampling
(SIR). The Figure 9 represents its operation. We will
note the state variable x
t
a random variable descri-
bing the state of a system at time t, y
t
a random
variable describing the sensor measurements at time
t, w
t
a variable describing the computed correction
of the predictions (importance weight) and q(x
k
|
x
0:t−1
,y
0:t
) the proposal distribution. The particle fil-
ter approximates the probable distribution of X
t
with
a set of samples, or particles noted p(x
0:t
| y
1:t
) com-
puted with
n
x
(i)
0:t
,w
(i)
0:t
,i = 1..n
o
. Particles are upda-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
520

Initialization Prediction
Correction
x
1
0
, ...x
n
0
Initial state :
x
(i)
t
∼ q
x
t
| x
(i)
0:t −1
,y
0:t
ˆw
(i)
t
= w
(i)
t−1
∗ p
y
t
| x
(i)
t
w
(i)
t
=
ˆw
(i)
t
∑
N
j=1
ˆw
(i)
t
X
0
Figure 9: Principle of the particle filter.
ted through a series of predictions based on the prior
knowledge of the system and corrections of these pre-
dictions based on the sensor measurements. The esti-
mation of the current state variable ˆx
t
is selected with
the argmax function.
The initialization is done by scanning the global
map row by row, from bottom to top, until white
pixels are detected, these pixels represent the proba-
ble starting point of a lane. The first line composed
of white pixels will be used as the initialization. Any
group of connected white pixels is defined as a seg-
ment on which we randomly scatter a defined number
of particles.
2.3.2 Particle Correction and Future Prediction
The particle filter implemented in our algorithm scans
the image every n rows, where n has been defined to
be small enough to detect possible new starts of la-
nes and big enough to reduce the computational time.
At initialization, these particles are associated to a
weight given by the global map. The weights are used
at time t > t
0
to give higher importance to most pro-
bable particles, thus resulting in better prediction for
future particles through multinomial resampling. The
weights of the different particles are normalized and
create a cumulative weights scale. Random values be-
tween 0 and 1 are computed and represented in this
scale where they are matched to specific particles.
To predict new particules, we only use, as past
positions, the positions of the particles related to the
random values. The new particles will follow a Gaus-
sian distribution centered around the past particle.
2.3.3 Cluster Mergings and Separations
As we said before, the airport areas are difficult to
model because they can easily vary. While the parti-
cle filter scans the image row after row, new lanes can
appear, old lanes can disappear and several lanes can
merge to form only one remaining lane. It is also pos-
sible that false positives trigger new lanes detections.
The initialization of particle clusters for new detected
lanes at time t and the prediction of future particles
for already existing clusters are done before launching
the t + 1 step. To manage the cases where a lane can
disappear or when a false positive has created a sus-
picion of lane, we implemented several thresholds. A
survival likelihood is computed for each particle, with
regards to its weight and the weights of the other parti-
cles, such as in Equation 7 where w
i
is the normalized
weight, n is the number of particles and p
i
is the sur-
vival likelihood. Once several particles have reached
a determined value of survival likelihood, the cluster
of particles is terminated.
p
i
=
(
1, i f w
i
≥
1
n
n ∗ w
i
, otherwise
(7)
In case of merging of lanes or separation of a detected
lane in multiple lanes, we decided to study the ba-
rycenter of each cluster of particles. Based on their
proximity, our algorithm either merges the clusters in
one or creates new clusters for new detected lanes.
An illustration of this cases can be found in Figure 10
where the green pixels represent particles with high
survival likelihood while red pixels represent particles
with low survival likelihood. It also shows as new la-
nes are tracked and clusters are merged.
2.4 Line Extraction
2.4.1 Polygonal Approximation
Once the particle filter processing of the image is fi-
nished, the algorithm output is a list of all the crea-
ted clusters and the positions of its particles at each
iteration of the particle filter. We select the most pro-
minent particle for each iteration based on the parti-
cle weight. We then choose to approximate the de-
tected lanes by affine equations. As the clusters can
sometime include curves, we perform a polygonal ap-
proximation. This increases the number of clusters
but the approximated lanes for the cluster positions
are more accurate. As the lanes in the tarmac will not
be too curvy, we can use this method without increa-
sing the computational time.
2.4.2 Line Fitting and Cluster Merging
Most of the time, we can see that a unique lane can be
separated in multiple clusters by the previous steps.
It also happens when there is a crossing in the image,
where a straight lane will separate in two and reappear
few meters ahead. As we need to give useful infor-
mation to the pilots, we decided to recreate this lanes
by merging the clusters. Figure 11 is an example of
Lane Detection and Scene Interpretation by Particle Filter in Airport Areas
521

(a)
(b)
Figure 10: (a) Fusion of clusters, (b) New lane tracking.
Figure 11: Clusters to be merged together.
two clusters to be merged together to form one lane.
For each cluster of positions, we use a line fitting
algorithm. Lines can either be vertical or horizontal.
To be able to compute the cluster line equation, we
differenciate these two cases. Once lines have been
computed for each cluster, we compare them between
each other in order to merge similar clusters and re-
create the observed lanes in the image.
2.5 Beacon Extraction
The main goal of our algorithm is to perform scene
analysis and lane detection. In the sections 2.2
and 2.3, we defined the method for the lane detection
but it can also be applied for beacon detection or tar-
mac limits detection. For the lane detection, we used
an edge map based on the model of a vertical straight
lane. In order to detect the horizontal lanes, we per-
form a transposition on the image before launching
our algorithm again. The results of the two iterations
are then mixed together. The process is also simi-
lar for beacons detection, for which we use the Sobel
edge map and a specific color map. As we use the
IPM view, the beacons are deformed and can be seen
as little blue stripes. Those are detected by our al-
gorithm, from which we select the first position, as it
represents the real position of the beacon.
3 RESULTS
In order to illustrate the results of our algorithm, we
simulated a case of line intersection, as we can see in
Figure 4(b), which is a case that can commonly occur
in airport areas.
The airplane model used for this simulation
is a A380 and the camera, which resolution is
1280pX960p and horizontal field of view is 80 de-
grees, is mounted on its fin at a distance D of 19,5
meters above the ground and an angle θ of 20 de-
grees. Our goal is to perform scene analysis to im-
prove pilots comprehension of the environment. Our
specifications is to analyse the scene up to 350 meters
ahead. For our algorithms, the image is represented
by an IPM view of resolution 1400pX14OOp where
each pixel represents an area of 25cmX25cm.
Figure 12 gives an overall view of the algorithm
results. In Figure 12(a) the green pixels represent
the estimation of the beacon position. Figure 12(b)
shows the results of the particle filter on the vertical
lines, with red points representing the particles with
low survival likelihood, where lines estimations are
highlighted in green in Figure 12(c). Figure 12(d)
and 12(e) follow the same process but on the trans-
posed IPM image.
To produce an image which could be easily used
by pilots, we return to the original view by performing
an inverse homography to highlight the detected lanes
and beacons in the real image. The result is shown in
Figure 13, where Figure 13(a) shows the combination
of the clusters detected in Figure 12(b) and 12(d).
The estimation of the lines positions is quite accu-
rate. The positions of the beacons, colored in red in
Figure 13(b) are nearly all matching the original bea-
con positions. However, our algorithm does not pre-
cisely detect the curve part of the taxiway lanes. Any
curved part brings noise to the lane detection because
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
522
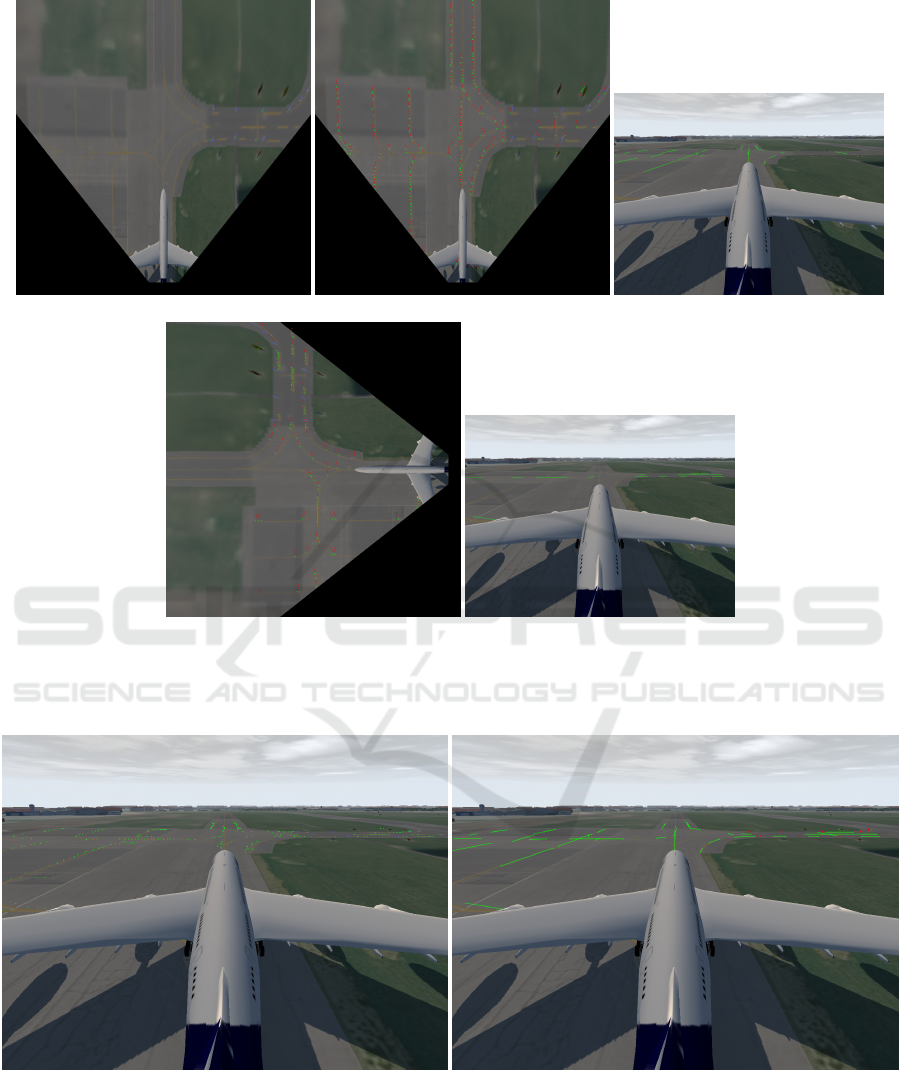
(a) (b) (c)
(d) (e)
Figure 12: (a) Detected beacons based on the original image, (b) Position of clusters from the particle filter based on the
original image, (c) Detected lines based on the original image, (d) Position of clusters from the particle filter based on the
transposed image, (e) Detected lines based on the transposed image.
(a) (b)
Figure 13: (a) Result of the combined position of clusters, (b) Result of the combined lines (green) and beacons (red).
our lane detection algorithm is based on an edge map
established by the lane model. On curved parts, the
lane model is modified and not accurately represen-
ted in the resulting edge map. Merging the two edge
maps in one with the same operation used to create
the global weights map could improve our algorithm
accuracy on curved parts without significantly increa-
sing the computation time.
Lane Detection and Scene Interpretation by Particle Filter in Airport Areas
523

4 CONCLUSIONS AND
PERSPECTIVES
In this paper, we presented an accurate algorithm for
scene analysis and lane detection in an airport taxi-
way, based on an IPM transformation and a particle
filter. For the moment, the algorithm is based on a
straight lane model. For curved parts, as the lane mo-
del changes, we will need to explore new models, in
order to detect any type of lanes in the scene and give
a more detailed view to the pilots. Extra tuning of
the road size threshold based on the modelling of the
size decrease in curved parts would greatly increase
the lane detection.
By now, images used for our algorithm validation
are produced by a simulator. They are modelised at
daytime, with clear weather conditions. Our objective
is to generalize our algorithm to other weather con-
ditions such as night time, rainy or foggy days. To
achieve this, we plan to increase our dataset by com-
bining information from RGB camera and IR camera.
As the simulation tool can be tuned to match our ca-
mera, we can work on images similar to real ones.
Our future goal is to use the combination of lanes
and beacons, with the help of other scene elements
such as the tarmac limits and panels on the side of
the tarmac for example, to implement a line tracking
algorithm. This algorithm will enable us to perform
egomotion estimation. This information can then be
used in an object detection algorithm also based on
an IPM transformation, which goal is to detect ob-
jects combining the egomotion estimation and images
at time t and t −1.
For now, our algorithm is not optimized and is
launched on a basic computer, with a computation
time of few seconds for lines, beacons and tarmac de-
tection for one image. In the future, we plan to opti-
mize the code and implement it on a dedicated archi-
tecture including multi-cores CPU, GPU and FPGA.
ACKNOWLEDGEMENTS
We would like to thank the OKTAL-SE company for
providing a simulation tool which provides images,
close to real images, for testing the method.
REFERENCES
Asif, M., Arshad, M. R., Zia, M. Y. I., and Yahya, A. I.
(2007). An implementation of active contour and kal-
man filter for road tracking. International Journal of
Applied Mathematics, 37(2):71–77.
Bertozzi, M. and Broggi, A. (1998). Gold: a parallel real-
time stereo vision system for generic obstacle and lane
detection. IEEE transactions on image processing :
a publication of the IEEE Signal Processing Society,
7(1):62–81.
Chapuis, R., Potelle, A., Brame, J., and Chausse, F.
(1995). Real-time vehicle trajectory supervision on
the highway. The International Journal of Robotics
Research, 14(6):531–542.
Deng, J., Kim, J., Sin, H., and Han, Y. (2013). Fast lane
detection based on the b-spline fitting. International
Journal of Research in Engineering and Technology,
2(4):134137.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2012). Distance
transforms of sampled functions. Theory of Compu-
ting, 8:415–428.
Hota, R. N., Syed, S., B, S., and Radhakrishna, P. (2009).
A simple and efficient lane detection using clustering
and weighted regression. In 15th International Confe-
rence on Management of Data, COMAD.
Jiang, R., Klette, R., Vaudrey, T., and Wang, S. (2010).
Lane detection and tracking using a new lane model
and distance transform. Machine Vision and Applica-
tions, 22:721–737.
Lipski, C., Scholz, B., Berger, K., Linz, C., Stich, T., and
Magnor, M. (2008). A fast and robust approach to
lane marking detection and lane tracking. 2008 IEEE
Southwest Symposium on Image Analysis and Inter-
pretation, pages 57–60.
Loose, H. and Franke, U. (2010). B-spline-based road mo-
del for 3d lane recognition. 13th International IEEE
Conference on Intelligent Transportation Systems, pa-
ges 91–98.
Sehestedt, S., Kodagoda, S., Alempijevic, A., and Dissana-
yake, G. (2007). Robust lane detection in urban envi-
ronments. 2007 IEEE/RSJ Int. Conference on Intelli-
gent Robots and Systems, pages 123–128.
Sun, T.-Y., Tsai, S.-J., and Chan, V. (2006). Hsi color mo-
del based lane-marking detection. 2006 IEEE Intelli-
gent Transportation Systems Conference, pages 1168–
1172.
Theuma, K. and Mangion, D. Z. (2015). An image pro-
cessing algorithm for ground navigation of aircraft.
In Bordeneuve-Guib
´
e, J., Drouin, A., and Roos, C.,
editors, Advances in Aerospace Guidance, Navigation
and Control, pages 381–399, Cham. Springer Interna-
tional Publishing.
Tomas, B., Ondrej, K., and Ondrej, P. (2017). Methods and
systems for providing taxiway stop bar information to
an aircrew.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
524
