
Street-view Change Detection via Siamese Encoder-decoder Structured
Convolutional Neural Networks
Xinwei Zhao
1
, Haichang Li
2
, Rui Wang
2
, Changwen Zheng
2
and Song Shi
3
1
Institute of Software Chinese Academy of Sciences, University of Chinese Academy of Sciences, Beijing, China
2
Science and Technology on Integrated Information System Laboratory,
Institute of Software Chinese Academy of Sciences, Beijing, China
3
Teleware Info & Tech (Fujian) Co.,LTD, Fujian Province, China
Keywords:
Change Detection, Semantic Segmentation, Siamese Network, Deep Learning.
Abstract:
In this paper, we propose a siamese encoder-decoder structured network for street scene change detection. The
encoder-decoder structures have been successfully applied for semantic segmentation. Our work is inspired
by the similarity between change detection and semantic segmentation, and the success of siamese network
in comparing image patches. Our method is able to precisely detect changes of street scene at the presence
of irrelevant visual differences caused by different shooting conditions and weather. Moreover, the encoder
and decoder parts are decoupled. Various combinations of different encoders and decoders are evaluated in
this paper. Experiments on two street scene datasets, TSUNAMI and GSV, demonstrate that our method
outperforms previous ones by a large margin.
1 INTRODUCTION
Change detection, i.e., finding meaningful changes
from registered image pairs of the same region but
captured at different time, is an important task in com-
puter vision. Specifically, given the registered image
pairs, we need to label each pixel as positive if it
has changed at semantic level or negative otherwise,
and produce a change mask at last, as Fig. 1 shows.
Change detection has been widely applied in several
areas including sandy land monitoring, offshore oil
spill detection, and urban planning, etc.
Change detection is quite challenging as a lot of
factors introduce irrelevant visual differences to the
image pairs, such as the differences in shooting equip-
ment, shooting conditions and weather. An example
of street-view image pairs is shown in Fig. 1. In Fig.
1, the appearance of the buildings is quite different as
they are captured in different weather. This demon-
strates that objects in such image pairs are likely to
show large variability even if they are unchanged.
Change detection has been studied for decades
(Singh, 1989). Most methods are pixel-based such
as image differencing and change vector analysis. In
most cases, these methods are unable to exclude the
aforementioned irrelevant visual differences, and can-
not precisely detect the changes as desired. Howe-
ver, convolutional networks are robust to handle these
problems. In this paper, we will explore street-view
change detection using deep learning methods.
The goal of this paper is to propose a method
to detect semantic changes precisely from registe-
red street-view image pairs at the presence of the
irrelevant changes. Inspired by the development
of semantic segmentation (Long et al., 2015; Chen
et al., 2017; Chen et al., 2018), we build a sia-
mese encoder-decoder structured convolutional net-
work (SEDS-CNN) to handle the change detection
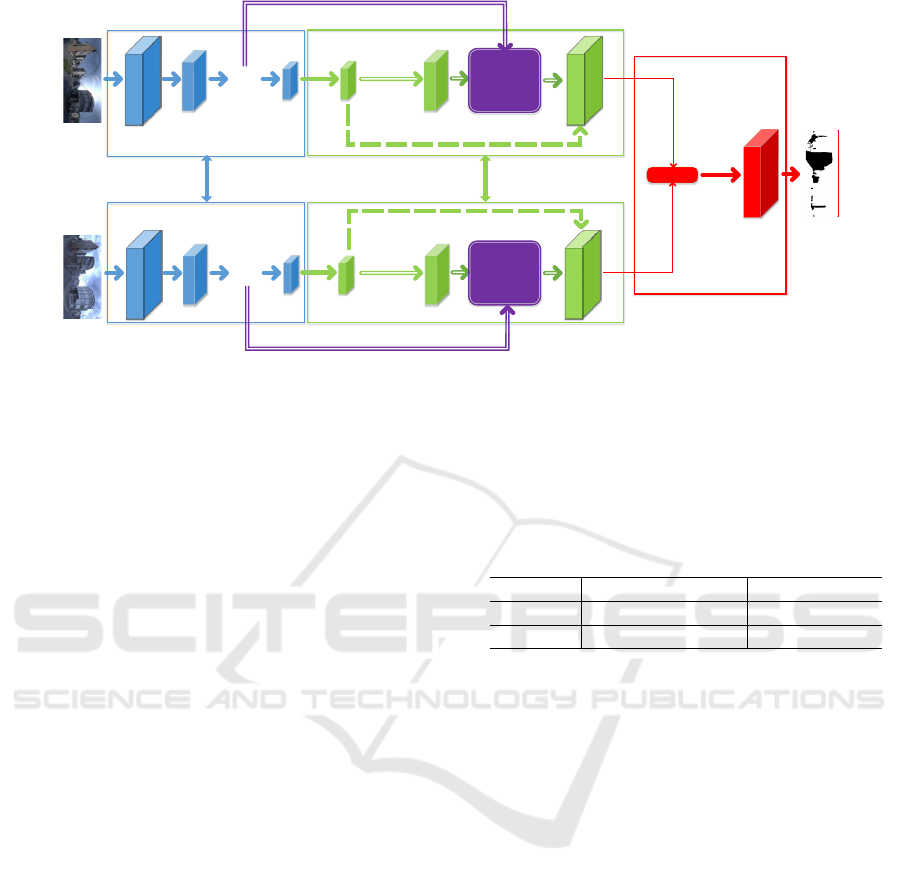
problem. The flowchart of the SEDS-CNN is shown
in Fig. 2.
Specifically, the two encoders of the siamese con-
volutional networks have an identical structure and
share the same weights, and the two decoders have
the same characteristics. They are designed to extract
the semantic information of image pairs. The last part
of SEDS-CNN, the differentiator, takes the absolute
difference of two feature maps generated by the deco-
ders and produces 2-channel feature maps to denote
the probability of changes and non-changes.
Moreover, we explore different combinations of
encoders and decoders to construct the SEDS-CNN.
Experiments on two publicly available datasets TSU-
NAMI and GSV (Sakurada and Okatani, 2015) show
that the proposed SEDS-CNN model outperforms the
Zhao, X., Li, H., Wang, R., Zheng, C. and Shi, S.
Street-view Change Detection via Siamese Encoder-decoder Structured Convolutional Neural Networks.
DOI: 10.5220/0007407905250532
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 525-532
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
525

Figure 1: One sample from TSUNAMI dataset (Sakurada and Okatani, 2015). The top and middle images are the same place
captured at different time, and the bottom image is the corresponding change mask. Black blocks are changed regions while
white ones are not changed. Note that although the two images on the top show large variability because of the sunlight, most
regions including the buildings on the left and right side are not regarded as changes.
existing approaches by a large margin.
The main contributions of this paper are listed as
follows:
1. A siamese network, called SEDS-CNN, is propo-
sed for street-view change detection. This net-
work is an end-to-end framework, which can ex-
tract semantic information and predict changes at
semantic level.
2. Experiments on two typical street-view datasets
demonstrate the effectiveness of the proposed
method, showing our model’s robustness to irrele-
vant visual differences. Our method outperforms
the previous ones by a large margin.
The remainder of our paper is organized as fol-
lows: Section 2 provides an overview of related
work on change detection and semantic segmenta-
tion. Section 3 presents the structure of our networks.
Section 4 details the experiment configuration and
analyzes the results. Section 5 concludes our work.
2 RELATED WORK
2.1 Change Detection
Change Detection has been studied for several deca-
des (Singh, 1989; Radke et al., 2005; Tewkesbury
et al., 2015) and witnessed great success in many
areas especially remote sensing. Among these con-
ventional methods, the pixel and post-classification
methods still remain popular even they have been
proposed for nearly 30 years. While these algo-
rithms produce good results on remote sensing ima-
ges, their robustness is far from enough to over-
come the irrelevant visual differences in optical image
pairs, whose final appearances are much more ea-
sily affected by uncontrollable factors such as chan-
ging weather and seasons, or small camera displace-
ment. A number of other methods focus on proba-
bility graph model including Markov Random Field
(Bruzzone and Prieto, 2000), Conditional Random
Field (Li et al., 2018), and Restricted Boltzmann ma-
chine (Gong et al., 2016).
In recent years, deep convolutional neural net-
works have shown striking power in computer vision.
Since then, more sophisticated CNNs are proposed
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
526

to tackle several classic vision problems. SSD (Liu
et al., 2016), YOLO (Redmon and Farhadi, 2017) and
FPN (Lin et al., 2017) are proposed to solve object
detection problems. FCN (Long et al., 2015), Dee-
plab(Chen et al., 2018) and many other fully con-
volutional based methods are designed to deal with
semantic segmentation. All these networks perform
far better than those methods that don’t use deep lear-
ning. However, few deep learning models have been
proposed to deal with change detection, at least for
supervised methods.
(Zagoruyko and Komodakis, 2015) proposed a si-
amese CNN architecture to compare image patches to
identify if objects in two images captured from diffe-
rent angles are the same one. Although it is not im-
possible to compare the entire image pairs in a patch-
by-patch way, it’s nearly unpractical both in terms of
complexity and performance. (Sakurada and Oka-
tani, 2015) used a VGG16 network fully pretrained
for large-scale object recognition task to help extract
features, and put them together with some manually
designed features to detect changes in street scene
image pairs. (Alcantarilla et al., 2018) proposed a de-
convolutional neural network to perform change de-
tection in street-view images. They superimposed one
image on top of the other to obtain a 6-channel image,
and then feed it to a simple deconvotlutional network,
which comprises 4 convolutional and 4 deconvolutio-
nal layers. Although deep learning are used in these
models, successful techniques in semantic segmenta-
tion such as dilated convolution and multi-scale py-
ramid pooling(Zhao et al., 2017; Chen et al., 2018)
are not applied. Besides, they didn’t merge low-level
feature maps either, which have rich boundary infor-
mation.
2.2 Semantic Segmentation
Deep convolutional networks have been successfully
applied both in recognition and semantic segmenta-
tion. (Long et al., 2015) was the first to propose
the fully convolutional neural network (FCN) trained
end-to-end to solve the dense pixel-wise prediction
tasks. However, the loss of spatial information cau-
sed by pooling layers is the major reason to restrict
its performance. In order to tackle this problem, se-
veral techniques are proposed to preserve spatial in-
formation as the network goes deeper. (Yu and Kol-
tun, 2015) proposed dilated convolution to replace
pooling and convolutional layers at the latter part of
convolutional networks, and it indeed expands the re-
ceptive fields and preserves the resolution of feature
maps at the same time, without increasing the num-
ber of parameters. (Ronneberger et al., 2015) suggests
concatenating low-level features to high-level ones to
compensate for the loss of spatial information. (Chen
et al., 2017) proposed to use global pooling and ASPP
(Atrous Spatial Pooling Pyramid) to capture multi-
scale information. Based on that, (Chen et al., 2018)
merged low-level feature maps to ASPP, and obtained
the state-of-art semantic segmentation model evalua-
ted on PASCAL VOC dataset.
Most proposed networks for semantic segmenta-
tion can be explained from an encoder-decoder per-
spective, in which encoders are used to extract spatial
and semantic information while decoders are used to
gather them to give each pixel a semantic label. This
is quite similar to change detection, where each pixel
is labeled changed or unchanged. In this case, we can
regard changes or non-changes as a kind of seman-
tic label, and this is the motivation behind our appro-
ach: use encoder-decoder structures as the backbone
for our model.
3 PROPOSED MODEL
In this section, we present the proposed SEDS-CNN
model. The overall flowchart is shown in Fig. 2.
From Fig. 2, we can find that the network has three
parts: encoder, decoder, and differentiator. The struc-
tures of the first two parts are identical and share the
same parameters. This is because (1) the two images
from each pair are unordered and we can not specify
which image precedes the other one, and (2) two ima-
ges of each pair should be projected to the same se-
mantic feature space to be compared. The extracted
semantic features produced by decoders are then em-
ployed by the differentiator and the following com-
ponents for change detection. We will describe the
above three parts in detail in the following paragraphs.
3.1 Encoder
The appearance for the same object could be varia-
ble in different images, even if they are unchanged at
semantic level. Inspired by this point, we intend to
project the original RGB image into the semantic fe-
ature space, which is favorable for change detection.
The above idea can be achieved by the encoding step.
The encoder part of SEDS-CNN model consists
of multiple convolutional layers, dilated convolutio-
nal layers and max pooling layers. Their functions are
merely to generate semantic features from the ima-
ges. As the input images go through these layers, the
extracted features become more and more abstract,
which have more semantic information.
Street-view Change Detection via Siamese Encoder-decoder Structured Convolutional Neural Networks
527
...
Fusion
&
UpsampleA2
...
Encoder1
Decoder1
Encoder2
Decoder2
Share
weights
Share
weights
Diff
Softmax
Differentiator
UpsampleA1
UpsampleA1
Fusion
&
UpsampleA2
UpsampleB
UpsampleB
FC or
ASPP
FC or
ASPP
Figure 2: Overview of the encoder-decoder structure, which is composed of three parts. (1) Encoder: takes an image as
input and produces multiple feature maps of different resolution. (2) Decoder: gathers feature maps from the encoder and
recovers spatial information. There are two subbranches in the decoder: UpsampleA1 followed by Fusion & UpsampleA2
and UpsampleB. The green and purple double-line arrows traverse one subbranch and the dashed green arrows traverse the
other. One of the two subbranches should be chosen and must be consistent in the two decoder modules. (3) Differentiator:
take the absolute difference of the two recovered feature maps from last part, feed it to a softmax layer, and produce a change
mask.
Unlike CNNs used in object recognition (Simo-
nyan and Zisserman, 2014; He et al., 2016) which
discard all their spatial information and produce high-
level semantic class labels, CNNs for change de-
tection need to predict semantic changes for each
pixel. Thus, the spatial information has to be maintai-
ned, and it’s same as in semantic segmentation. The-
refore, the decoder part is necessary for change de-
tection model.
3.2 Decoder
While encoders are used to produce high-level and
low-level features, decoders gather them to recover
the spatial information and produce the change mask.
In our work, we employ FC (Fully Convolutional
layer) from Fully Convolutional Network(Long et al.,
2015) and ASPP (Atrous Spatial Pyramid Pooling)
from Deeplabv3 (Chen et al., 2017; Chen et al., 2018)
as the main components of our decoders.
FC merely reduces the channel of the input fea-
ture maps while ASPP uses 6-dilated, 12-dilated and
18-dilated convolutional kernels along with a global
pooling layer to extract multi-scale features. As both
of the two modules take the last layers from the en-
coders as input, detailed spatial information such as
boundaries is lost. Therefore, (Long et al., 2015) ups-
amples the feature maps at stride 32, and adds fea-
ture maps at stride 8 from the 3rd pooling layers and
feature maps at stride 16 to them to compensate for
lost spatial information. Similarly, (Chen et al., 2018)
Table 1: Detailed settings for differnet decoders. *A1 refers
to UpsampleA1.
Decoder target size of A1* Fusion
FC stride 16 addition
ASPP stride 4 concatenating
concatenate stride 4 feature maps to upsampled stride
32 feature maps produced by ASPP module.
Following their implementations, we deploy FC
and ASPP as exactly as they do. As Fig. 2 shows,
within the decoder module, two subbranches are pro-
vided. One subbranch fuses feature maps from lo-
wer levels and the other doesn’t. Any one of these
two subbranches can be chosen. Fusion model fuses
low-level features to compensate for detailed boun-
dary spatial information.
Different settings are detailed in Table 1 when FC
or ASPP is deployed. These settings are exactly the
same as the original authors use.
3.3 Differentiator
The siamese encoder-decoder will produce pixel-level
semantic feature maps for the input image pairs. This
provides a basic input with much less interference for
the differentiator. At the uppermost layers of the two
parallel encoder-decoder branches, we take the abso-
lute difference of the two feature maps. This is the dif-
ferencing process, and the formulation is as follows:
L
i, j,k
= σ(|A
i, j,k
− B
i, j,k
|) (1)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
528

where L is the feature map produced by the diffe-
rentiator, A and B are feature maps produced by the
two decoders, and σ(·) refers to the softmax layer. k
takes two values here: 0 and 1. Therefore, L
i, j,0
de-
notes the probability of pixel (i, j) being unchanged
and L
i, j,1
denotes the probability of that pixel being
changed.
Then we use the labeled change mask and the
obtained prediction L to train the network in an end-
to-end way with the cross-entropy loss.
In our model, the encoder and decoder compo-
nents are completely decoupled, and hence they can
be replaced by other CNN architectures and combi-
ned to form new networks. In our experiments, we
will demonstrate this point in detail.
4 EXPERIMENTS
4.1 DataSet
We conduct experiments on two datasets: TSUNAMI
and GSV. Both datasets consist of 100 pairs of 224
× 1024 street scene images. The TSUNAMI dataset
contains images of tsunami-damaged areas of Japan,
which are captured by a running vehicle on the street.
The GSV dataset contains Google Street View ima-
ges.
Image pairs in both datasets are coregistered be-
forehand by (Sakurada and Okatani, 2015). For each
image pair, a binary image is provided as the ground
truth, which indicates whether a change occurred for
each corresponding pixel pair. Changes in these two
datasets are defined as changes occurred on the sur-
face of objects (the surface of buildings) and struc-
tural changes (appearing/disappearing objects). The-
refore, grounds, skies, clouds, and illuminations are
not regarded as changes. Further information about
both of the two datasets can be found in (Sakurada
and Okatani, 2015).
An example of changes such as the buildings and
cars are shown in Fig. 1. Both the datasets con-
tain many irrelevant visual differences between image
pairs which meet our demands to train a robust model.
4.2 Configuration
Network structures, training policy, and parameter
settings are detailed in the following paragraphs.
Fine-Tune. VGG16 and Resnet-101, the encoders
in our model, are pretrained on ImageNet. FC, FC-
F, ASPP, and ASPP-F stand for Fully Convolutional
layer, Fully Convolutional layer with Fusion, Atrous
Spatial Pyramid Pooling and Atrous Spatial Pyramid
Pooling with Fusion respectively. Decoders are trai-
ned from scratch except for FC-F, which is fine-tuned
from a trained FC, as FC-F trained from scratch is
slow to converge and hard to outperform its FC coun-
terpart.
Data Augmentation. Due to the insufficiency of data,
data augmentation is necessary to train a decent mo-
del. We augment our data in the following three ways.
First, images are left-right flipped randomly with a
probability of 0.5. Second, images are rescaled rand-
omly from 0.5 to 2.0 times the original size. Third,
crop an 800 × 174 patch from the image produced in
the second phase. Before the third phase, an image
might be smaller than 800 × 174 if shrunk too much
in the second phase. In this case, some pixels should
be padded to the right and bottom of the image, in
order to guarantee it’s not smaller than 800 × 174.
Afterward, these pixels will be ignored when the loss
is calculated as they are useless for training.
Optimization. Our models are implemented using
Tensorflow and trained on a single NVIDIA TITAN
Xp. We use standard stochastic gradient descent with
batch size of 8, momentum of 0.9 and weight decay of
0.0005 to train our models via back propagation. Each
model is trained for 600 epochs except FC-F is fine-
tuned on a pretrained FC for 1000 epochs (Data aug-
mentation substantially reduces the risk of overfitting
if trained for too many epochs). Initial learning rates
for VGG16 and Resnet-101 are set to 0.001 and 0.007
respectively, with the exception of VGG16+FC-F set-
ting to 0.0002. For each model, the learning rate is
controlled by the polynomial learning rate policy:
α
k
= α ∗ (1 −
k
m
)
p
(2)
where α
k
is the learning rate at iteration k, α is the
initial learning rate, k is the current iteration, m is the
number of iterations to finish the training process and
p is power mentioned above.
In our experiments, we train and evaluate our mo-
dels via 5-fold cross-validation, i.e., 80 image pairs
for training and 20 images for validation, the same
as configured in (Sakurada and Okatani, 2015). We
report two common metrics from semantic segmen-
tation and machine learning: mean Intersection over
Union (mean IoU) and F1 score. And It can be easily
proved that F1/2 ≤ mean IoU ≤ F1.
4.3 Results and Discussion
Table 2 lists the performance of our models composed
of different encoders and decoders. On TSUNAMI
dataset, our best model VGG16+FC outperforms (Sa-
kurada and Okatani, 2015)’s and (Alcantarilla et al.,
Street-view Change Detection via Siamese Encoder-decoder Structured Convolutional Neural Networks
529
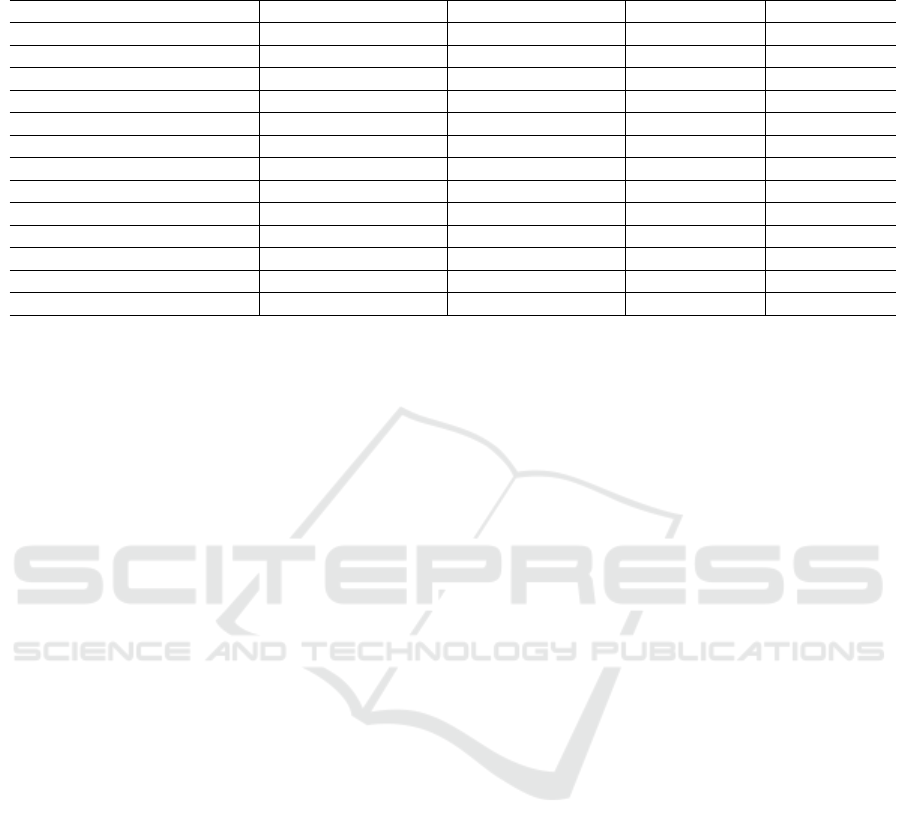
Table 2: Experiment results. *”no aug” means no data augmentation processes are carried out. The suffix *-F means low-level
feature maps are fused. *”Dila” means dilated convolutional layers are used.
Model TSUNAMI mean IoU TSUNAMI F1 score GSV mean IoU GSV F1 score
(Sakurada and Okatani, 2015) - 0.723 - 0.639
(Alcantarilla et al., 2018) - 0.774 - 0.614
VGG16+FC (no aug*) 0.617 0.751 - -
VGG16+FC 0.707 0.819 0.526 0.671
VGG16+FC-F* 0.662 0.788 0.466 0.613
VGG16+ASPP 0.579 0.718 0.409 0.516
VGG16+ASPP-F 0.618 0.752 0.512 0.662
Resnet-101+FC 0.597 0.740 0.531 0.675
Resnet-101+FC-F 0.583 0.722 0.509 0.654
Resnet-101+ASPP 0.477 0.635 0.496 0.642
Resnet-101+ASPP-F 0.569 0.719 0.520 0.661
Resnet-101+Dila*+ASPP 0.634 0.767 0.539 0.681
Resnet-101+Dila+ASPP-F 0.614 0.753 0.545 0.697
2018)’s by 0.096 and 0.045 respectively. On GSV da-
taset, our best model Resnet-101+Dila+ASPP-F out-
performs (Sakurada and Okatani, 2015)’s and (Alcan-
tarilla et al., 2018)’s by 0.058 and 0.083 respectively.
Our best results on TSUNAMI and GSV
are achieved by VGG16+FC and Resnet-
101+Dila+ASPP-F respectively. Results of GSV are
much worse than those of TSUNAMI. We attribute
it to the complexity of GSV. First, there are much
more small objects in GSV than TSUNAMI, such
as people, cars and trees. These small objects are
hard to be identified by models that lose too much
spatial information such as VGG16+FC. An example
of these disappearing small objects is illustrated in
Fig. 3. Note that cars in the middle of the scene and
branches of trees have totally gone in the prediction
of VGG+FC. Second, boundaries in GSV are sharper.
How to refine boundary is a hard problem in semantic
segmentation, and more smooth boundaries in the
predictions of our models cause the F1 score to be
lower than those in TSUNAMI.
Table 2 also shows the detailed performance of
models constructed with different encoders and de-
coders.
FC and ASPP. ASPP outperforms FC only when di-
lated convolutional layers are present. ASPP captu-
res multi-scale features using large dilated convoluti-
onal kernels. Thus, ASPP makes full of its advantages
when the input feature maps are large. However, the
image heights in our experiments are 174 and 224 in
training and inference process respectively and will be
reduced to 11 and 14. In this case, the size of feature
maps is even smaller than the size of abovementioned
dilated convolutional kernels, and leads to bad perfor-
mance of ASPP in the absence of dilated kernels.
Fusion and Dilation. Fusion improves the perfor-
mance of ASPP largely when dilated kernels are not
used. When dilated kernels are used, the advantages
of Fusion are not so obvious. Fusion introduces spa-
tial information from low-level features and dilated
kernels preserve low-level information. They perform
the same function to some extent. So it explains why
Fusion helps less when dilated kernels are present.
Another notable thing is that data augmentation
is necessary for the robustness of our models, espe-
cially when the dataset is small. As Table 2 shows,
VGG16+FC with augmentation obtains a much better
result than VGG16+FC without augmentation. Fig.
4 partly explains the reason: model training without
augmentation suffers from overfitting.
Basically, Resnet-101 combined with ASPP per-
forms much better than VGG16 combined with FC
in semantic segmentation on several datasets in al-
most all aspects. However, VGG16+FC soundly beats
Resnet-101+Dila+ASPP-F on TSUNAMI as shown
in Table 2, which is very counterintuitive. As we trac-
ked the training and validation process, we found it
suffer from overfitting. Resnet-101+Dila+ASPP-F is
a complex model and good at recovering fine bounda-
ries. On the one hand, the number of images in TSU-
NAMI is too small to properly fine-tune such a com-
plex model. On the other hand, there are fewer objects
in TSUNAMI than GSV and most objects are large in
size. Although VGG16+FC cannot recover fine boun-
daries of objects, this doesn’t affect the accuracy as
severely as that in GSV.
5 CONCLUSIONS
In this paper, we have proposed a novel approach,
called SEDS-CNN, for street-view change detection.
The SEDS-CNN model is able to handle the irre-
levant visual differences in change detection by in-
troducing the encoder-decoder parts. VGG+FC gi-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
530

(a) image1
(b) image2
(c) ground truth
(d) VGG16+FC
(e) VGG16+FC-F
(f) Resnet-101+Dila+ASPP-F
Figure 3: Illustration of our models on one TSUNAMI sample image pair and one GSV sample image pair. The left column
comes from TSUNAMI and the right column comes from GSV.
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
0.4 0.8 1.2 1.6 2.1 2.5 2.9 3.3 3.7 4.1 4.5 4.9 5.3 5.7 6.0
mean IoU
iteration (k)
train val
Figure 4: Training (80 pairs) and validation (20 pairs) mean
IoU over iterations for VGG16+FC with no data augmenta-
tion. It’s suffering from overfitting.
ves a decent result when the scenes are simple, ob-
jects are large and datasets are small, while Resnet-
101+Dila+ASPP-F performs better when the opposite
is true. Experiments show that techniques in semantic
segmentaion benefit change detection.
The encoder and decoder parts are decoupled. It is
flexible to choose various CNN architectures as enco-
ders and decoders. Moreover, it is convenient to train
the SEDS-CNN model in an end-to-end way. Ex-
periments on TSUNAMI and GSV datasets demon-
strate that the proposed SEDS-CNN model outper-
forms previous methods by a large margin.
ACKNOWLEDGEMENTS
This work was supported in part by the Natural
Science Foundation of China under Grants U1435220
and 61503365, Youth Innovation Foundation of the
4th China High Resolution Earth Observation Confe-
rence under Grant GFZX04061502, and STS project
of Fujian Province and Chinese Academy of Sciences
under Grant 2018T3009.
Street-view Change Detection via Siamese Encoder-decoder Structured Convolutional Neural Networks
531

REFERENCES
Alcantarilla, P. F., Stent, S., Ros, G., Arroyo, R., and
Gherardi, R. (2018). Street-view change detection
with deconvolutional networks. Autonomous Robots,
42(7):1301–1322.
Bruzzone, L. and Prieto, D. F. (2000). Automatic analy-
sis of the difference image for unsupervised change
detection. IEEE Transactions on Geoscience and Re-
mote sensing, 38(3):1171–1182.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam,
H. (2017). Rethinking atrous convolution for
semantic image segmentation. arXiv preprint
arXiv:1706.05587.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous se-
parable convolution for semantic image segmentation.
arXiv preprint arXiv:1802.02611.
Gong, M., Zhao, J., Liu, J., Miao, Q., and Jiao, L. (2016).
Change detection in synthetic aperture radar images
based on deep neural networks. IEEE transactions
on neural networks and learning systems, 27(1):125–
138.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Li, Y., Martinis, S., Plank, S., and Ludwig, R. (2018). An
automatic change detection approach for rapid flood
mapping in sentinel-1 sar data. International Jour-
nal of Applied Earth Observation and Geoinforma-
tion, 73:123–135.
Lin, T.-Y., Doll
´
ar, P., Girshick, R. B., He, K., Hariharan, B.,
and Belongie, S. J. (2017). Feature pyramid networks
for object detection. In CVPR, volume 1, page 4.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. C. (2016). Ssd: Single shot mul-
tibox detector. In European conference on computer
vision, pages 21–37. Springer.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Radke, R. J., Andra, S., Al-Kofahi, O., and Roysam, B.
(2005). Image change detection algorithms: a syste-
matic survey. IEEE transactions on image processing,
14(3):294–307.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. arXiv preprint.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Sakurada, K. and Okatani, T. (2015). Change detection
from a street image pair using cnn features and su-
perpixel segmentation. In BMVC, pages 61–1.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Singh, A. (1989). Review article digital change detection
techniques using remotely-sensed data. International
journal of remote sensing, 10(6):989–1003.
Tewkesbury, A. P., Comber, A. J., Tate, N. J., Lamb, A., and
Fisher, P. F. (2015). A critical synthesis of remotely
sensed optical image change detection techniques. Re-
mote Sensing of Environment, 160:1–14.
Yu, F. and Koltun, V. (2015). Multi-scale context ag-
gregation by dilated convolutions. arXiv preprint
arXiv:1511.07122.
Zagoruyko, S. and Komodakis, N. (2015). Learning to com-
pare image patches via convolutional neural networks.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 4353–4361.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Py-
ramid scene parsing network. In IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
2881–2890.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
532
