
Learning Task-specific Activation Functions using Genetic Programming
Mina Basirat and Peter M. Roth
Institute of Computer Graphics and Vision, Graz University of Technology, Graz, Austria
Keywords:
Deep Neural Networks, Activation Functions, Genetic Programming.
Abstract:
Deep Neural Networks have been shown to be beneficial for a variety of tasks, in particular allowing for end-to-
end learning and reducing the requirement for manual design decisions. However, still many parameters have
to be chosen manually in advance, also raising the need to optimize them. One important, but often ignored
parameter is the selection of a proper activation function. In this paper, we tackle this problem by learning task-
specific activation functions by using ideas from genetic programming. We propose to construct piece-wise
activation functions (for the negative and the positive part) and introduce new genetic operators to combine
functions in a more efficient way. The experimental results for multi-class classification demonstrate that for
different tasks specific activation functions are learned, also outperforming widely used generic baselines.
1 INTRODUCTION
Deep Neural Networks (DNNs) (Goodfellow et al.,
2016; LeCun et al., 2015) have recently become po-
pular and are now successfully applied for a wide
range of applications. However, since increasingly
more complex and deeper networks are of interest,
strategies are required to make neural network trai-
ning efficient and stable. While initialization (e.g.,
(Sutskever et al., 2013; Mishkin and Matas, 2017))
and normalization techniques (e.g., (Laurent et al.,
2016)) are well studied, a relevant and important fac-
tor is often neglected: the role of activation functions
(AF).
This is illustrated Figure 1, where we show the
results of a simple experiment on a 2D dataset repre-
senting the XOR-problem. In particular, we trained
a simple neural network with only one hidden layer
consisting of only one neuron. It can be seen from
Figure 1a that using a Rectified Linear Unit (ReLU)
as Activation Function (AF), even this simple pro-
blem cannot be solved. In contrast, as shown in Fi-
gure 1b, using a more complex activation function
such as obtained by our approach we get a signifi-
cantly better result.
Even though recent work demonstrated that AFs
are of high relevance (Klambauer et al., 2017; Ra-
machandran et al., 2018; Clevert et al., 2016; Elf-
wing et al., 2018; Glorot et al., 2011; Gulcehre
et al., 2016)), due to its simplicity and reliability most
deep learning approaches use Rectified Linear Units
(a) ReLU.
(b) Our approach.
Figure 1: Importance of activation functions: Using ReLU
even a simple problem like XOR-problem cannot be solved,
whereas our approach yields a meaningful solution.
(ReLU) (Nair and Hinton, 2010).
Due to their universal approximation proper-
ties, the research in this field was concentrated on
squashing functions such as Sigmoid and Tanh (Hor-
nik, 1991). However, training DNNs using such
functions suffers from the vanishing gradient problem
(Hochreiter, 1998). To overcome this problem, vari-
ous non-squashing functions were introduced, where
the most notable one is (ReLU). In particular, as the
derivative of positive inputs in ReLU is one, the gra-
dient cannot vanish. In contrast, as all negative values
are mapped to zero, there is no information flow in
DNNs for negative values, which is known as dying
ReLU.
To deal with this problem, various generalizati-
ons of ReLU such Leaky ReLU (Maas et al., 2013)
have been proposed. Similarly, Exponential Linear
Units (ELU) (Clevert et al., 2016) do not only elimi-
Basirat, M. and Roth, P.
Learning Task-specific Activation Functions using Genetic Programming.
DOI: 10.5220/0007408205330540
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 533-540
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
533

nate the bias shift in the succeeding layers, but also
push the mean activation value towards zero by re-
turning a bounded exponential value for negative in-
puts. Although showing competitive results, ELU is
not backed by a very strong theory. A theoretically
proven extension, Scaled Exponentiation Linear Uni-
tes (SeLU) (Klambauer et al., 2017), makes DNN le-
arning more robust. In fact, it is shown that the pro-
posed self-normalizing network converges towards a
normal distribution with zero mean and unit variance.
Another direction was pursued in (Ramachandran
et al., 2018), finally introducing Swish. Different se-
arch spaces are created by varying the number of core
units used to construct the AF. In addition, an RNN is
trained to search the state space for a novel AF. The
proposed approach shows competitive results for both
shallow and deep neural networks, however, Swish
was not found by the approach but was already inclu-
ded in the initial set of candidate solutions. Recently,
a theoretic justification for the design has been given
in (Hayou et al., 2018), showing that Swish propaga-
tes information better than ReLU. Moreover, (Penning-
ton et al., 2018) showed that Swish along with ort-
hogonal initialization provides a dynamical isometry,
which allows for faster learning. Thus, existing ap-
proaches to estimate AFs are lacking theoretical foun-
dation, are based on complex theory, which is hard to
understand in the context of practical applications, or
are based on inefficient search schemes, which still
require to manually set several parameters.
To overcome these problems and to avoid the need
for prior information (as in the case of Swish), we
propose an approach based on ideas of Genetic Pro-
gramming (GP) (Mitchell, 1996) to learn efficient
activation functions better suited for a specific task. In
particular, building on neuro-evolutionary algorithms
(Schaffer et al., 1992), starting from simple initial
AFs, more complex functions can be estimated. In
particular, we define a set of piece-wise functions
and combine them over several iterations based on
their ability to solve a specific problem. For that pur-
pose, we define new genetic operators, namely Hy-
brid Crossover and Hybrid Mutation, allowing us to
explore the specific search space (i.e., functions and
operators) in an efficient way.
To demonstrate the benefits of our approach, we
apply it for image classification problems. We show
that, compared to commonly used baselines, using the
learned AFs we can obtain better classification results
for the CIFAR-10 and CIFAR-100 benchmark data-
sets. In addition, we demonstrate that for different
tasks different AFs are learned, better representing the
characteristics of the problems.
The remainder of the paper is structured as fol-
lows: First, in Sec. 2, we discuss the related work
in the context of GP for Neural Networks. Next,
in Sec. 3, we introduce our new neuro-evolutionary
algorithm for learning task-specific AFs. Then, in
Sec. 4, we give an experimental evaluation of our ap-
proach and discuss the findings. Finally, in Sec. 5 we
summarize and conclude our work.
2 RELATED WORK
Neuroevolution, i.e., applying evolutionary algo-
rithms (EAs) in the optimization of DNNs (Whitley,
2001), is a vital field of research. In general, there
are two main directions. First, optimizing training pa-
rameters such as hyper-parameters (Loshchilov and
Hutter, 2016) or weights (Montana and Davis, 1989;
Igel, 2003). In the latter case, in contrast to met-
hods like gradient descent, also global optima can be
estimated. Second, evolving an optimal DNN topo-
logy, which, however, is not straightforward. There-
fore, existing approaches follow two strategies: con-
structive (Qiang et al., 2010) and destructive (Han-
cock, 1992). Constructive methods start from a sim-
ple topology and gradually increase the complexity
until an optimality criterion is satisfied. In contrast,
destructive approaches start from an initially complex
topology and incrementally reduce the unnecessary
structures.
Recently, co-evolution of topology and weights
(TWEANNs) has shown to be more effective and ef-
ficient, where the most successful approach is NEAT
(Stanley and Miikkulainen, 2002). NEAT follows
the constructive strategy and gradually evolves a sim-
ple DNN topology towards unbounded complexity by
adding nodes and connections between them while
preserving the optimality of topology. Thus, there
have been several extensions of NEAT. For instance,
in (Miikkulainen et al., 2017) two extensions, Deep-
NEAT and CoDeepNEAT, have been proposed. In
contrast to NEAT, in DeepNEAT a node represents a
layer and consists of a table of hyper-parameters (i.e.,
number of neurons ) related to it. In CoDeepNEAT,
two populations (modules and blueprints) are initia-
lized separately, where a module is a graph and re-
presents a shallow DNN. A blueprint has also a graph
structure and consists of nodes pointing out to specific
module species. Both modules and blueprints evolve
in parallel. Finally, the modules and blueprints are
combined to build the topology of the DNN.
Similarly, (Suganuma et al., 2017) explored a
CNN architecture via Cartesian GP (CGP) for image
classification, where also high-level functions such as
convolution or pooling operations are implemented.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
534
Recently, (Liu et al., 2018) proposed a constructive
hierarchical genetic representation approach for evol-
ving DNN topologies. Initialized with small popula-
tions of primitives such as convolutional and pooling
operations at the bottom of the hierarchy, the topo-
logy gets more and more complex by adding evolved
primitives into a graph structure.
Even though there has been drawn a lot of atten-
tion to TWEANNs, evolving AFs was only of limited
interest so far. The idea closest to ours is HA-NEAT
(Hagg et al., 2017). HA-NEAT (Hagg et al., 2017)
extends NEAT to evolve AFs of neurons, topology,
and weights, resulting in a heterogeneous network. In
contrast, we fix the topology and evolve piece-wise
AFs on layer level. The proposed candidate solutions
are more complicated (advanced) than those of HA-
NEAT. More importantly, the complexity of evolved
AFs is, in contrast to HA-NEAT, unbounded. Mo-
reover, we can evolve our approach also along with
topology.
3 EVOLVING PIECE-WISE
ACTIVATION FUNCTIONS
The goal of this work is to estimate non-linear AFs
better suited for specific tasks. To this end, we build
on two ideas. First, as negative and positive inputs
have a different influence on learning, we propose to
use piece-wise AFs (i.e., separately defined positive
and negative parts). Second, as the search space can
be very large, we propose to build on the ideas of Ge-
netic Programming to allow for a more efficient se-
arch.
3.1 Genetic Programming
Genetic Programming (GP) (e.g., (De Jong, 2006)),
can be seen a population-based meta-heuristic to
solve problems in the field of stochastic optimization.
In particular, we are given a large set of candidate so-
lutions, referred to as population, but we do not know
how to estimate the optimal solution for the given
task. The main idea to overcome this problem is to
evolve a population towards a better solution.
The evolution typically starts from a population
consisting of randomly selected candidate solutions,
called individuals. These are described by a set of
properties (gens), which can be altered by three bio-
inspired operations: (a) selection, (b) crossover, and
(c) mutation. Selection is the simple process of se-
lecting individuals according to their fitness. In con-
trast, crossover is a stochastic operator, exchanging
information between two individuals (often called pa-
rents: mom and dad) to form a new offspring. Simi-
larly, mutation is also a stochastic operator, helping to
increase the diversity of the population by randomly
choosing one or more genes in an offspring and chan-
ging them.
Then, in an iterative process, where we refer an
iteration to as generation, each individual is evaluated
and based on their fitness, we select a set of parents
solutions for breeding. Subsequently, we apply bree-
ding operators on pairs of individuals to generate new
pairs of offsprings. Eventually, we update the popula-
tion with the set of parents and bred offsprings. This
process is repeated until a pre-defined number of ge-
nerations or a pre-defined optimality criterion is met.
3.2 Breeding Operators
Targeting to evolve piece-wise AFs, each individual
in our population represents an AF, where a gene is
either the left or the right part of an AF (see Figure 2).
activation left
activation right
AF
Gene
Figure 2: An individual in the population of our GP.
To evolve AFs as described above, we introduce new
operators representing our specific problem.
3.2.1 Inheritance Crossover
The Inheritance Crossover operator inherits genes
from both parents. The first (second) offspring inher-
its its left AF from the mom (dad), and its right AF
from the dad (mom). This way, the operator resem-
bles a one-point crossover operator. However, as we
are dealing with piece-wise functions the cutoff point
is pre-determined. This is illustrated in Figure 3.
mom’s left
dad’s right
(a) Offspring 1
dad’s left
mom’s right
(b) Offspring 2
Figure 3: Inheritance Crossover.
3.2.2 Mutation Operator
The Mutation operator randomly chooses a gene and
then replaces it with a randomly selected pre-defined
AF. In fact, this helps our approach to further explore
the search space for new AFs. This is illustrated in
Figure 4.
Learning Task-specific Activation Functions using Genetic Programming
535

mom’s left
Selected Activation:
ReLU
dad’s right
Selected Gene
Figure 4: Mutation operator.
3.2.3 Hybrid Crossover
To combine multiple AFs, we additionally introduce
the Hybrid Crossover operator. As for Inheritance
Crossover, the cutoff point is fixed. Using a randomly
selected mathematical operator, the first (second) off-
spring combines mom’s and dad’s (dad’s and mom’s)
negative part of the AF to form its own negative part.
Subsequently, the first (second) offspring’s positive
part of the AF is formed via a combination of mom’s
and dad’s (dad’s and mom’s) positive part, as illustra-
ted in Figure 5.
op
1
: mom’s left : dad’s left
op
2
: mom’s right : dad’s right
(a) Offspring 1
op
1
: dad’s left : mom’s left
op
2
: dad’s right : mom’s right
(b) Offspring 2
Figure 5: Hybrid Crossover operator, where op
1
and op
2
are chosen randomly.
3.2.4 Hybrid Mutation Operator
The Hybrid Mutation operator helps our approach to
discover any possible combination of AFs. Thus, it
first picks two random pre-defined AFs and combi-
nes them with a random operator. Then it replaces a
randomly chosen gene with newly the generated AF.
3.3 Evaluating of Activation Functions
The Hybrid crossover operator generates hybrid AFs,
that we evaluate by parsing according to the following
grammar:
expression := f | (operation : expression : expression)
operation :=+ | − | × | / |min |max
f := HardSigmoid | Sigmoid | ELU | (1)
Linear | ReLU | SeLU | Softplus | . . .
where f represents the set of candidate solutions. The
list is not fixed, and we can easily add additional
operations and candidate solutions f .
Example: Given an AF generated by Hybrid crosso-
ver:
(× : Softplus : ELU) .
To compute the equivalent infix expression, we use
(1) and parse above AF, as shown in Figure 6:
Softplus × ELU
×
Softplus
ELU
Figure 6: The parse tree of Softplus × ELU.
3.4 Learning Activation Functions
After defining the genetic operators and explaining
the function evolution, we can describe our appro-
ach as summarized in Algorithm 1. Initially, we ge-
nerate a population of random AFs (line 3). Next,
by using the evaluate operator (line 4) the fitness of
each AF is determined according to the classifica-
tion performance on an independent test set. Then,
our approach selects a set of parent AFs based on
their fitness for breeding (line 7). To generate new
AFs (line 11), we first apply the Crossover opera-
tors and then the Mutation operator as defined in
Sec. 3.2. When applying the Crossover operator we
stochastically choose between Inheritance and Hybrid
as shown in Algorithm 2. Similarly, we update our
population with the set of parents and bred offsprings.
This procedure is iterated until a pre-defined optima-
lity criterion is met.
Algorithm 1: GP.
1: procedure GP(population-size)
2: population ←
/
0
3: population ← INITIALIZE(population-size)
4: EVALUATE(population)
5: repeat
6: children ←
/
0
7: parents ← SELECT(population, 30%)
8: for i ≤ (population-size −|parents|)/2 do
9: increment i by one
10: hmom, dadi ∈ parents × parents
11: offsprings ← CROSSOVER(mom, dad)
12: for offspring ∈ offsprings do
13: offspring ← MUTATE(offspring)
14: EVALUATE(offsprings)
15: children ← children ∪ offsprings
16: population ← parents ∪ children
17: until termination condition
18: return population
Algorithm 2.
1: procedure CROSSOVER(mom, dad)
2: c ← toss a coin
3: if c is heads then
4: return INHERITANCE(mom, dad)
5: return HYBRID(mom, dad)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
536

4 EXPERIMENTAL RESULTS
To demonstrate the benefits of our approach, in
Sec. 4.3, we apply the approach for two real-world
benchmark datasets of different complexity, namely
CIFAR-10
1
and CIFAR-100
1
. This way, we are also
able to show that for different tasks different choices
of AFs are meaningful. Moreover, to demonstrate the
generality of the evolved AFs, we apply them to dif-
ferent architectures (i.e., ResNet (He et al., 2016) vs.
VGG (Simonyan and Zisserman, 2015)). In addition,
we give a baseline comparison to a random search for
learning AFs in Sec. 4.2. For all experiments, we used
the same experimental setup, which we describe in
Sec. 4.1.
4.1 Experimental Setup and
Implementation Details
Similar to (Ramachandran et al., 2018), we run our
approach on shallow architectures (i.e., ResNet20).
Then we use the learned AFs to train deeper networks
(i.e., Resnet56). Moreover, to demonstrate that the le-
arned functions are of general interest, we use them
to train classifiers using the VGG-16 architecture. To
this end, we used the default parameters for both ar-
chitectures. To avoid random effects, all networks
have been initialized using the same initialization (He
et al., 2015). Our implementation of evolutionary le-
arning builds on DeepEvolve
2
, a neuroevolution fra-
mework developed to explore the optimal DNN topo-
logy for a given task. In our case, we fixed the DNN
topology and defined the search-space based on the
AFs. Throughout all experiments
3
, we used a popu-
lation size of 30 and evolved the population over 18
generations. The considered candidates for the initial
population are shown in Table 1.
4.2 Random Search
First of all, we demonstrate the benefits of using a
GP-based approach compared using a simple Random
Search (RS). To this end, we run our approach as des-
cribed in Section 4.1. For RS, we initially generate
randomly selected AFs and consider them as “best so-
lution”. Then, randomly (by tossing a coin) we run
either one of the following steps: (1) Combine two
random AFs with a random operator for both parts of
the AF and evaluate the whole AF based on the DNN
1
https://www.cs.toronto.edu/ kriz/cifar.html
2
https://github.com/jliphard/DeepEvolve
3
The experiments were carried out on a standard PC
(Core-i7, 64GB RAM) with two Titan-X GPUs attached.
Table 1: Candidate activation functions, where y(x < 0) and
y(x ≥ 0) indicate the (left and right) part, respectively.
Function Expression
ReLU y(x) = max(x,0)
ELU y(x) =
(
e
x
− 1 x < 0
x x ≥ 0
SeLU y(x) =
(
λα(e
x
− 1) x < 0
λx x ≥ 0
Softplus y(x) = ln(1 + e
x
)
HardSigmoid y(x) = max(0, min(1, (x + 1)/2))
Sigmoid y(x) = 1/(1 + e
−x
)
Linear y(x) = x
performance on the independent test dataset. (2) Just
two random AFs are selected for both parts. The eva-
luation is carried out as before. If the performance
in any of the cases is better than that of the “best so-
lution”, we update the best one. Similarly, as in our
approach, this process is repeated until a predefined
number of iterations or a pre-defined optimality cri-
terion is met. In both cases, we used a ResNet-20 as
underlying network architecture.
The obtained results for our approach and for RS
are given in Table 2 and Table 3, respectively. In ad-
dition, we give a comparison to three different wi-
dely used baselines, namely ReLU, ELU, and SeLU, and
Swish, which has proven to work well on a variety of
tasks. The results do not only demonstrate that our
GP-based approach yields better solutions for the fi-
nal classification problem, but also that the solutions
are more stable! In fact, using RS also a few well-
performing functions can be found by chance. Howe-
ver, since the search space is rather large, this is not
very likely in practice; in particular, when the num-
ber of candidate solutions and possible mathematical
operators is further increased.
4.3 CIFAR-10 and CIFAR-100
Next, we demonstrate our approach for the CIFAR-10
benchmark dataset. Again, we evolved a set of candi-
date AFs using our GP-based approach using ResNet-
20 and used the evolved AFs to learn a classifier based
on ResNet-56. The thus obtained results in terms of
classification accuracy for the best performing solu-
tions (also compared to the baselines) are shown in
Table 4. It can be seen that the best results are obtai-
ned using the multiplication of Softplus and ELU in
negative part and HardSigmoid and Linear in posi-
tive part (93.00%). For better understanding, we also
illustrate the top 5 AFs plus Swish in Figure 7.
Learning Task-specific Activation Functions using Genetic Programming
537
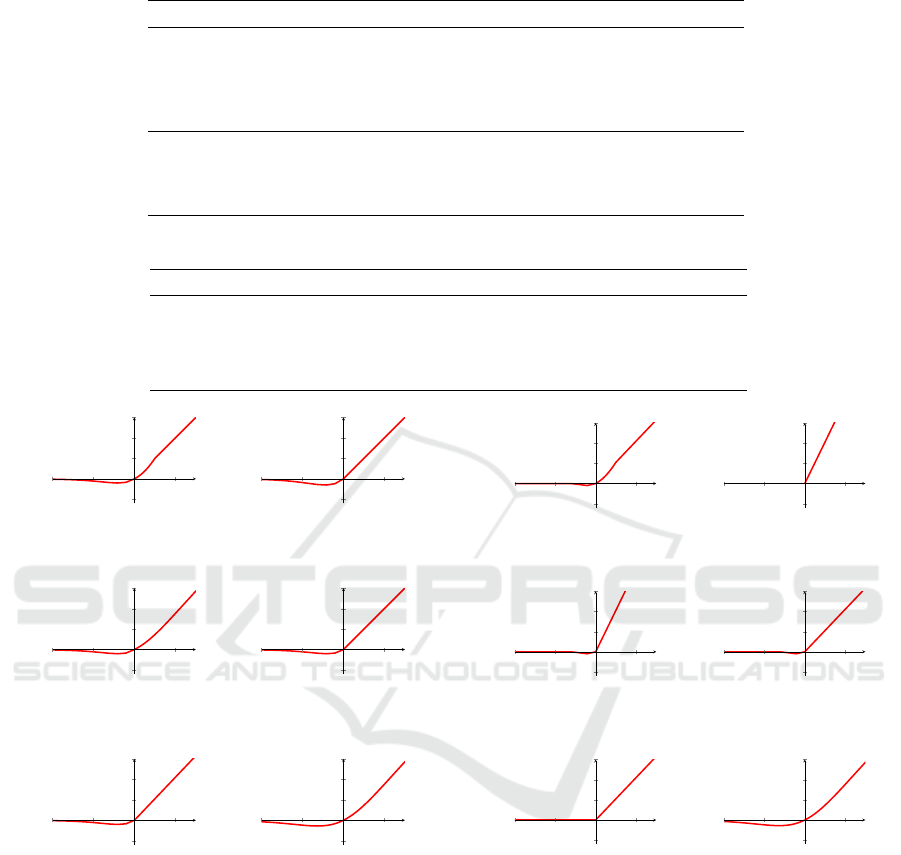
Table 2: Performance of top 5 evolved AFs for CIFAR-10 obtained using ResNet-20.
Accuracy Activation Function
1. 79.24% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = ELU
2. 78.46% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = max(ReLU, SeLU)
3. 78.39% y(x < 0) = Sigmoid ×SeLU and y(x ≥ 0) = min(Linear, ELU)
4. 77.72% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = HardSigmoid ×Linear
5. 77.08% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = Sigmoid ×ReLU
6. 78.51% y(x) = Swish
7. 73.00% y(x) = ELU
8. 71.98% y(x) = ReLU
9. 65.79% y(x) = SeLU
Table 3: Perfromance of top 5 AFs found by Random Search on CIFAR-10 obtained using ResNet-20.
Accuracy Activation Function
1. 76.03% y(x < 0) = SeLU × Sigmoid and y(x ≥ 0) = Sigmoid × Linear
2. 74.35% y(x < 0) = HardSigmoid and y(x ≥ 0) = HardSigmoid
3. 72.40% y(x < 0) = (ELU − HardSigmoid) and y(x ≥ 0) = (HardSigmoid − Linear)
4. 62.58% y(x < 0) = (Linear − ReLU) and y(x ≥ 0) = (Sigmoid − Sigmoid)
5. 51.65% y(x < 0) = HardSigmoid and y(x ≥ 0) = Sigmoid
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = HardSigmoid × Linear
y(x < 0) = Softplus × ELU
y(x ≥ 0) = min(Linear,ELU)
y(x < 0) = Sigmoid × SeLU
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = Sigmoid × ReLU
y(x < 0) = Softplus × ELU
y(x ≥ 0) = ELU
y(x < 0) = Softplus × ELU
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = max(ReLU,SeLU)
y(x < 0) = Softplus × ELU
y(x) = Swish
Figure 7: Top 5 evolved AFs plus Swish for CIFAR-10.
Next, we run the same experiment using the VGG-
16 framework and show the results in Table 5. Even
though the AFs have not been trained for this archi-
tecture, we get competitive results. Similarly, we
get the best results again using the multiplication of
Softplus and ELU in negative part and HardSigmoid
and Linear in positive part (93.43%). These results
clearly show, that not only similar functions are evol-
ved, but that the results are competitive and outperfor-
ming the baseline in most cases.
Finally, we run experiments on CIFAR-100,
where the results for ResNet-56 and VGG-16 are
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = HardSigmoid × SeLU
y(x < 0) = HardSigmoid × ELU
y(x ≥ 0) = (Linear + SeLU)
y(x < 0) = HardSigmoid × ReLU
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = (Linear + SeLU)
y(x < 0) = Softplus × ELU
y(x ≥ 0) = SeLU
y(x < 0) = HardSigmoid × ELU
−4 −2 2
−1
1
2
3
−4 −2 2
−1
1
2
3
y(x ≥ 0) = SeLU
y(x < 0) = HardSigmoid × ReLU
y(x) = Swish
Figure 8: Top 5 evolded AFs plus Swish for CIFAR-100.
shown in Table 6 and Table 7, respectively. It can be
seen that the multiplication of ELU and HardSigmoid
in negative part and SeLU and HardSigmoid in po-
sitive part (73.84%) gives the best results for Res-
Net56. For VGG, the AF consisting of multiplication
of HardSigmoid and ReLU in the negative part and
SeLU in the positive part (71.36%) yields the best re-
sults. Again, the top 5 AFs compared to Swish are
illustrated in Figure 8. It can also be seen that com-
pared to CIFAR-10 the shapes of the evolved AFs are
different!
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
538
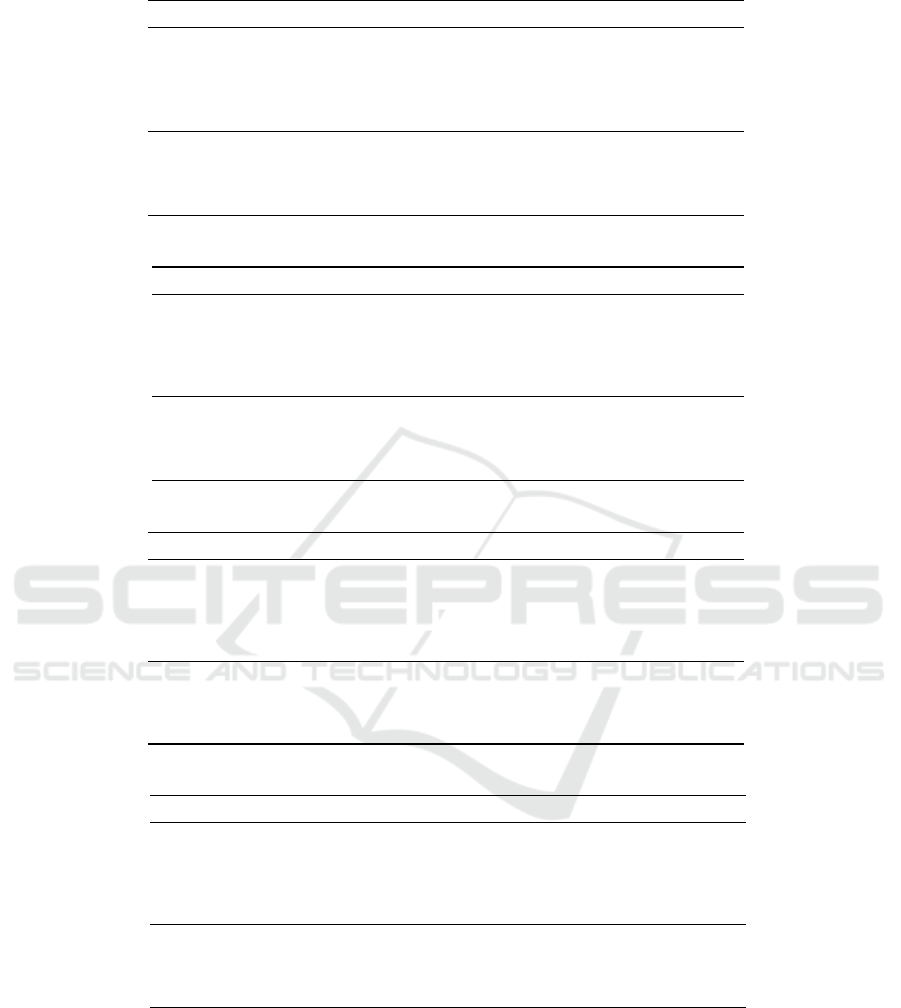
Table 4: Performance of top 5 evolved activation functions for CIFAR-10 based on ResNet-56.
Accuracy Activation Function
1. 93.00% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = HardSigmoid ×Linear
2. 92.87% y(x < 0) = Sigmoid ×SeLU and y(x ≥ 0) = min(Linear, ELU)
3. 92.66% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = Sigmoid ×ReLU
4. 92.38% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = ELU
5. 92.27% y(x < 0) = Softplus ×ELU and y(x ≥ 0) = max(ReLU, SeLU)
6. 92.43% y(x) = ReLU
7. 91.45% y(x) = ELU
8. 91.43% y(x) = SeLU
6. 92.83% y(x) = Swish
Table 5: Performance of top 5 evolved AFs for Cifar10-VGG16.
Accuracy Activation Function
1. 93.43% y(x < 0) = Softplus × ELU and y(x ≥ 0) = HardSigmoid × Linear
2. 93.32% y(x < 0) = Softplus × ELU and y(x ≥ 0) = ELU
3. 93.18% y(x < 0) = Softplus × ELU and y(x ≥ 0) = max(ReLU,SeLU)
4. 93.14% y(x < 0) = Sigmoid × SeLU and y(x ≥ 0) = min(Linear,ELU)
5. 92.89% y(x < 0) = Softplus × ELU and y(x ≥ 0) = Sigmoid × ReLU
6. 93.00% y(x) = ReLU
7. 92.60% y(x) = ELU
8. 92.88% y(x) = SeLU
9. 93.00% y(x) = Swish
Table 6: Performance of top 5 evolved AFs for Cifar100-Resnet-56.
Accuracy Activation Function
1. 73.84% y(x < 0) = HardSigmoid × ELU and y(x ≥ 0) = HardSigmoid × SeLU
2. 73.81% y(x < 0) = HardSigmoid × ReLU and y(x ≥ 0) = SeLU + Linear
3. 73.77% y(x < 0) = Softplus × ELU and y(x ≥ 0) = SeLU + Linear
4. 73.52% y(x < 0) = HardSigmoid × ELU and y(x ≥ 0) = SeLU
5. 73.12% y(x < 0) = HardSigmoid × ReLU and y(x ≥ 0) = SeLU
5. 73.31% y(x) = ReLU
6. 72.58% y(x) = ELU
7. 71.57% y(x) = SeLU
8. 73.98% y(x) = Swish
Table 7: Performance of top 5 evolved AFs for Cifar100-VGG16.
Accuracy Activation Function
1. 71.36% y(x < 0) = HardSigmoid × ReLU and y(x ≥ 0) = SeLU
2. 71.28% y(x < 0) = Softplus × ELU and y(x ≥ 0) = SeLU + Linear
3. 70.95% y(x < 0) = HardSigmoid × ReLU and y(x ≥ 0) = SeLU + Linear
4. 70.22% y(x < 0) = HardSigmoid × ELU and y(x ≥ 0) = HardSigmoid × SeLU
5. 70.19% y(x < 0) = HardSigmoid × ELU and y(x ≥ 0) = SeLU
5. 70.74% y(x) = ReLU
6. 71.12% y(x) = ELU
7. 70.59% y(x) = SeLU
8. 71.23% y(x) = Swish
5 CONCLUSION
Even though deep learning approaches allow end-to-
end learning for a variety of applications, there are
still many parameters which need to be manually set.
An important parameter, which is often ignored, is the
choice of AFs. Thus, we tackled this problem and
studied the importance of AFs when learning DNNs
for classification. In particular, we introduced a GP-
based evolving procedure to learn the best AF for a
given task. The presented results did not only show
competitive results but also that for different tasks dif-
ferent AFs are learned. In contrast to random sam-
pling, our approach guarantees that meaningful and
Learning Task-specific Activation Functions using Genetic Programming
539

competitive AFs are found. This is remarkable as
only very basic candidate solutions are provided (in
contrast to, e.g., Swish). Moreover, our approach is
adapting very well to different kinds of problems.
REFERENCES
Clevert, D., Unterthiner, T., and Hochreiter, S. (2016). Fast
and accurate deep network learning by exponential li-
near units (ELUs). In Proc. Int’l Conf. on Learning
Representations.
De Jong, K. A. (2006). Evolutionary Computation: A Uni-
fied Approach. MIT press.
Elfwing, S., Uchibe, E., and Doya, K. (2018). Sigmoid-
weighted linear units for neural network function ap-
proximation in reinforcement learning. Neural Net-
works, 107:3–11.
Glorot, X., Bordes, A., and Bengio, Y. (2011). Deep sparse
rectifier neural networks. In Pro. Int’l Conf. on Artifi-
cial Intelligence and Statistics.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press.
Gulcehre, C., Moczulski, M., Denil, M., and Bengio, Y.
(2016). Noisy activation functions. In Proc. Int’l Conf.
on Machine Learning.
Hagg, A., Mensing, M., and Asteroth, A. (2017). Evolving
parsimonious networks by mixing activation functi-
ons. In Proc. Genetic and Evolutionary Computation
Conf.
Hancock, P. J. B. (1992). Pruning neural nets by genetic
algorithm. In Proc. Int’l Conf. on Artificial Neural
Networks.
Hayou, S., Doucet, A., and Rousseau, J. (2018). On the
selection of initialization and activation function for
deep neural networks. arXiv:1805.08266.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving deep
into rectifiers: Surpassing human-level performance
on imagenet classification. In Proc. IEEE Int’l Conf.
on Computer Vision.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Identity
mappings in deep residual networks. In Proc. Euro-
pean Conf. on Computer Vision.
Hochreiter, S. (1998). The vanishing gradient problem du-
ring learning recurrent neural nets and problem so-
lutions. Int’l Journal of Uncertainty, Fuzziness and
Knowledge-Based System, 6(2):107–116.
Hornik, K. (1991). Approximation capabilities of mul-
tilayer feedforward networks. Neural Networks,
4(2):251–257.
Igel, C. (2003). Neuroevolution for reinforcement learning
using evolution strategies. In Proc. IEEE Congress on
Evolutionary Computation.
Klambauer, G., Unterthiner, T., Mayr, A., and Hochreiter,
S. (2017). Self-normalizing neural networks. In Ad-
vances on Neural Information Processing Systems.
Laurent, C., Pereyra, G., Brakel, P., Zhang, Y., and Ben-
gio, Y. (2016). Batch normalized recurrent neural net-
works. In Proc. IEEE Int’l Conf. on Acoustics, Speech
and Signal Processing.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep lear-
ning. Nature, 521:436–444.
Liu, H., Simonyan, K., Vinyals, O., Fernando, C., and Ka-
vukcuoglu, K. (2018). Hierarchical representations
for efficient architecture search. In Proc. Int’l Conf.
on Learning Representations.
Loshchilov, I. and Hutter, F. (2016). CMA-ES for hyper-
parameter optimization of deep neural networks. In
Proc. Int’l Conf. on Learning Representations (Works-
hop track).
Maas, A. L., Hannun, A. Y., and Ng, A. Y. (2013). Rectifier
nonlinearities improve neural network acoustic mo-
dels. In Proc. ICML Workshop on Deep Learning for
Audio, Speech and Language Processing.
Miikkulainen, R., Liang, J. Z., Meyerson, E., Rawal, A.,
Fink, D., Francon, O., Raju, B., Shahrzad, H., Navru-
zyan, A., Duffy, N., and Hodjat, B. (2017). Evolving
deep neural networks. CoRR, abs/1703.00548.
Mishkin, D. and Matas, J. (2017). All you need is a good
init. In Proc. Int’l Conf. on Learning Representations.
Mitchell, M. (1996). An Introduction to Genetic Algo-
rithms. MIT Press.
Montana, D. J. and Davis, L. (1989). Training feedforward
neural networks using genetic algorithms. In Proc.
Int’l Joint Conf. on Artificial Intelligence.
Nair, V. and Hinton, G. E. (2010). Rectified linear units
improve restricted boltzmann machines. In Proc. Int’l
Conf. on Machine Learning.
Pennington, J., Schoenholz, S. S., and Ganguli, S. (2018).
The emergence of spectral universality in deep net-
works. arXiv:1802.09979.
Qiang, X., Cheng, G., and Wang, Z. (2010). An overview of
some classical growing neural networks and new de-
velopments. In Proc. Int’l Conf. on Education Techno-
logy and Computer.
Ramachandran, P., Zoph, B., and V. Le, Q. (2018). Sear-
ching for activation functions. In Proc. Int’l Conf. on
Learning Representations (Workshop track).
Schaffer, J. D., Whitley, D., and Eshelman, L. J. (1992).
Combinations of genetic algorithms and neural net-
works: A survey of the state of the art. In Proc. Int’l
Workshop on Combinations of Genetic Algorithms
and Neural Networks.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
Proc. Int’l Conf. on Learning Representations.
Stanley, K. O. and Miikkulainen, R. (2002). Evolving neu-
ral networks through augmenting topologies. Evoluti-
onary Computation, 10(2):99–127.
Suganuma, M., Shirakawa, S., and Nagao, T. (2017). A
genetic programming approach to designing convolu-
tional neural network architectures. In Proc. Genetic
and Evolutionary Computation Conference.
Sutskever, I., Martens, J., Dahl, G., and Hinton, G. (2013).
On the importance of initialization and momentum in
deep learning. In Proc. Int’l Conf. on Machine Lear-
ning.
Whitley, D. (2001). An overview of evolutionary algo-
rithms: Practical issues and common pitfalls. Infor-
mation and Software Technology, 43:817–831.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
540
