
Magnetic Three-dimensional Pose Control System for Micro Robots
in the Human Head
Gaby Isabel Manzo Pantoja
a
, Martín Alonso Muñoz Medina
b
and Oscar Andrés Vivas Albán
c
University of Cauca, Calle 5 No. 4-70, FIET, Popayán, Colombia
Keywords: Magnetic Fields, Micro Robot, Magnetic Navigation Systems.
Abstract: Micro robots are devices that have the ability to revolutionize the area of medicine. These devices work
without cables, move easily in aqueous environments, and have the ability to be controlled in different ways,
allowing them to access very small places. Currently, three-dimensional electromagnetic actuating systems
have been proposed for the movement of micro robots by means of arrangements of Helmholtz and Maxwell
coils with various functionalities but with high energy consumption. The present investigation proposes a
system of coils of Helmholtz and Maxwell with analysis of the currents used to move the micro robot,
complementing with the simulation of movement of the micro robot in the subarachnoid region of the human
brain by means of Unity. In this way, it is planned to take a first step to know the design of a real system so
that in the future, microrobots can reach difficult areas such as the subarachnoid region.
1 INTRODUCTION
Minimally invasive surgery is one of the greatest
advances that technology has made in recent years. In
recent years there has been an enormous growth in the
area of medical robotics, mainly through the growing
demand for good quality medical care in the countries
of great development, reinforced by the creation of a
new social network. High quality means, among other
things, prevention rather than care, precision and
repeatability of the least possible intrusion in the
patient’s body (Dario et al., 2000).
Micro robots are planned to be used in various
surgical procedures, taking advantage of the relative
large size of some human organs. However, with the
reduction of dimension to less than one millimeter,
many additional places in the human body will be
available for these interventions. The micro robots
could navigate the natural pathways of the human
body, which would allow intervention with minimal
trauma. Although the idea of performing a surgical
intervention entirely by a robot seems futuristic, the
handling of micro robots using fiber optic cables or
radio links, while the surgeon observes and directs the
progress (Flynn et al., 1998) is increasingly more real,
a
https://orcid.org/ 0000-0001-7307-7859
b
https://orcid.org/ 0000-0003-4151-8589
c
https://orcid.org/ 0000-0001-5381-8234
it could be said that micro robot operations are an
increasingly real possibility (Joseph et al., 2005).
One of the most innovative features of
microrobots today, is that they can be moved in liquid
environments, and for this numerous methods have
been proposed, among which are mechanical
swimming structures that replicate the wave
movement by means of links, designs similar to fish
that use actuators GMA (Magneto strictive Alloy),
SMA (memory alloy actuators), PZT (piezoelectric
actuators), among others. Recent studies have shown
that the micro robots with the best results would be
mostly biomimetic and many of them would use
magnetic fields to feed and wirelessly control the
micro robot (Abbott et al., 2009). These micro robots
could be could be effective depending on the
environment in which the micro robot is located. A
lot of micro robots are being inspired so that in the
future they imitate the movements of nature and also
use techniques that facilitate the management of the
power of the system and the wireless control. The
micro robots, have the ability to enhance the
treatment of cancer in the central nervous system
(Nelson et al., (2010). The use of neuronal prostheses
and deep brain stimulation are other promising
Pantoja, G., Medina, M. and Albán, O.
Magnetic Three-dimensional Pose Control System for Micro Robots in the Human Head.
DOI: 10.5220/0007483400650074
In Proceedings of the 12th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2019), pages 65-74
ISBN: 978-989-758-353-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
65

applications for wirelessly guided micro robots, since
they can even remain as implants. Nowadays, the
possibility of using micro robots in medical procedures
such as the precise transport of drugs within the body,
brachytherapy, transport of stem cells in order to
rebuild damaged tissues, transport of electrodes in the
brain and treatments such as hyperthermia and
thermoablation (Nelson et al., 2010).
Currently, there is a large amount of research in
the human brain and to a large extent in the
subarachnoid area, which is located in the skull, made
with radiology techniques and myelography methods
(Thijssen et al., 1979), more specifically, measuring
the distance between the dura mater and the spinal cord
to his left, right, anterior and posterior (Kosa et al.,
2007). A case of great interest is the treatment of brain
tumours, which are extremely lethal and therefore, it
becomes imperative to intervene by means of surgeries
that are mostly of great complexity. Despite many
efforts, the administration of drugs to the brain remains
a challenge, mainly because the brain barrier,
consisting of endothelial cells that are closely
interconnected and that cover the entire interior of the
walls of the brain vessel, are mostly insurmountable for
the therapeutic molecules that seek to leave the
medication in the affected area, which means that
leaving the medicine is sometimes impossible. In fact,
98 % of new drugs used in the central nervous system
to fight brain cancer and other chronic diseases cannot
enter the brain following a systemic administration
(Pardridge, 2003).
In this particular case, the area of interest is the
nervous system, more specifically the subarachnoid
region. The central nervous system is made up of the
brain, the spine, and the cerebrospinal fluid in which
the brain and spine are bathed. This fluid is colourless
and has properties similar to water (relative viscosity
between 1.020-1.027poise, density 1.0032-1.0048kg
m-3, has a pH of 7.35-7.7, in addition to a surface
tension 60-63 * 10-6 N mm -1) (Murphy et al., 2016).
The space of the subarachnoid region tends to be
symmetrical on the left and right sides of the spinal
cord, while the anterior and posterior segments are
highly asymmetrical and it is difficult to access both in
practice, extending from vertebra L2 to the second
segment of the sacrum (Moore and Dalley, 2009). A
2.5 mm micro robot could navigate in the lateral or
posterior section of the subarachnoid space in
approximately half of the world population, while a 1.5
mm micro robot would reach 85 % of the same
population (Duffner et al., 2003). To access the brain,
procedures such as craniotomies are used, however,
cerebrospinal fluid samples are usually taken with a
lumbar puncture between the L3 and L4 vertebrae
(third and fourth lumbar vertebra). Therefore, it is
possible to insert a micro
robot in this area and navigate to the brain to intervene
the target, leaving the skull intact, this being one of the
biggest advances recently put to test by means of
catheter (Purdy et al., 2005). In the present project, the
Maxwell and Helmholtz coils will be used to
magnetize the micro robot and move it by a simulation
of the human subarachnoid region, more specifically, a
pair of Maxwell coils and two pairs of stationary
Helmholtz coils.
The use of these coils was initially proposed by
Yesin et al (Yesin et al., 2006), specifying that a pair of
Helmholtz coils and a pair of Maxwell are organized in
a certain direction, making the static performance
constant, in order to direct and drive the micro robots.
This work is organized as follows: Section 2 will
briefly discuss the advances that have existed in the
study of the Helmholtz and Maxwell coils, section 3
will give a brief description of the main mathematics
governing the Helmholtz and Maxwell coils, later in
section 4 we will talk about the base equations that
were used and in the subsection that is here we will talk
about the proposed equations whose emphasis is to
determine the current that the coils would need for the
proposal, then in section 5 will talk about the
anthropometry of the human head, which was used to
design the system in Unity3D, later the results of this
research will be shown in section 6 and finally the
conclusions of the project are dictated together with the
future works that this would have.
2 MAGNETIC NAVIGATION
Magnetic navigation systems are defined as a set of
software and hardware used in a certain region of the
human body. Generally, these include a magnet that
has a front field which extends far enough to project a
magnetic field into the operating region in the patient
(Creighton and Burgett, 2006). In other cases, two
magnets are used, a support for them and a positioner
that selectively changes the location of the magnets
(Werp and Creighton, 2010). On the other hand, (Choi
et al., 2009) proposed a special magnetic navigation
system to obtain a static system. In this, there are two
pairs of Helmholtz and Maxwell coils that generate a
uniform magnetic flux in a desired direction in a xy
plane. Subsequently, there was an improvement in the
magnetism obtained by the propulsion system with
only one pair of Maxwell coils, which is more
advantageous for smaller volumes, obtaining a lower
power consumption (Choi et al., 2009). Similarly, (Ha
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
66

et al., 2010) proposed a magnetic propulsion consisting
of three Helmholtz coils and one Maxwell coil.
Understanding the fields required for the
wireless control of permanent magnets is relatively
simple, since the magnetization of the material can be
modelled as a constant. The use of analytical models
for higher precision magnetic forces, allows the current
existence of symmetric bodies axially smooth and with
magnetic qualities. Another relevant advance was the
obtaining of a flat movement of a ferromagnetic micro
robot, using a pair of Helmholtz and Maxwell coils,
which are rotated by means of a motor (Yu et al.,
2010). This rotation generates a magnetic pair, which
rotates the micro robot, while the Maxwell coils
generate a propulsion force, allowing the microbot to
move in the X and Y (Zhang et al., 2009) planes.
However, the propulsive force produced by the rotation
is very small and cannot overcome the force of the
blood flow. Arai et al. proposed an electromagnetic
actuation system consisting of three pairs of Helmholtz
coils and showing the results in a spiral-type micro
robot (Sendoh et al., 2004). Previous studies proposed
an electromagnetic action system, using two pairs of
stationary coils to produce the locomotion of a
ferromagnetic micro robot in the form of a cylinder in
a 2D (Choi et al., 2009) plane.
Apart from the aforementioned systems,
another was proposed consisting of a pair of Helmholtz
and Maxwell stationary coils and a pair of rotational
ones, the Helmholtz and Maxwell helices were
formulated in the central x axis (Jeong et al., 2010). As
a last innovation, there is a 3D locomotion system for
an electromagnetic actuation system, consisting of
three pairs of Helmholtz coils that magnetize and align
the micro robot and two pairs of Maxwell coils that
drive it. In addition, the three pairs of Helmholtz coils
generate a rotational magnetic field and rotate the
micro robot (Yu et al., 2010). The currents necessary
for the operation of magnetic navigation systems are an
important factor to take into account when studying
electromagnetic propulsion systems For the previously
described case (3D locomotion system) it is stated that
for the generation of uniform magnetic fields in the
three pairs of Helmholtz and Maxwell coils, the
number of turns of the winding is fundamental, since
when increasing or decreasing the winding, the
magnetic field will increase or decrease respectively.
In this way, controlling the magnetic field becomes
relatively easy (Yu et al., 2010). In the case of a
microrobot of approximately 2.5 cm x 6.4 mm x 3.2
mm built with 12 piezoelectric micromotors, a current
of 2.7 x 10-5 A was needed for its operation, which was
calculated providing a torque of 4.6 x 1 0- 5 Nm per
second (Westebring-van der Putten et al., 2008). When
dealing with small dimensions, technological problems
must be taken into account, for example, that currently
there are no sufficiently small motors and cables. In
practice, solenoids less than 1 mm3 are hardly feasible;
In addition, the maximum current density is limited by
the dissipation of energy, that is, the dissipation is
related to the size of the microbot (Elwenspoek and
Wiegerink, 2012).
The consumption of energy in these propulsion
systems is a present problem in most of the current
proposals in this field. Taking as an example the
magnetic propulsion system OctoMag, able to create
gradients of field of up to 2 T and fields of orientation
of up to 50 mT, while driving the robot (Kummer et al.,
2010). The creation of these fields involves
considerable energy needs, which in turn result in
much greater heat dissipation, affecting the
performance of the system in long periods of use.
Thinking about this problem, the research is currently
focused on developing magnetic navigation systems
that reduce the energy requirements, which in turn are
able to achieve sufficient control over the microbot.
One of them consists of “pulling” of a microbot by
means of magnetic field gradients. This method of
propulsion involves the reduction of the amplitude of
the currents that flow in the Maxwell coils, which are
used continuously during the operation and their
resistances are usually higher than those of the
Helmholtz coils. Therefore, a decrease in the currents
flowing in the Maxwell coils has a dramatic impact on
the power consumption of the general platform (Jeong
et al., 2010).
3 DESCRIPTION OF THE COILS
3.1 Helmholtz Coils
Helmholtz coils consist of two coaxial wire loops that
are usually mounted on a common axis at a fixed
distance. In essence, by passing a certain amount of
equal currents through them, a highly uniform
magnetic field is generated within a limited space on
the centroid between the coils. Thus, Helmholtz coils
are ideal for use in the magnetic fields of a device when
it is tested, and in this way produce precise and
repeatable results (Webb et al., 2007). The magnetic
navigation of a micro robot consists of the generation
of a force F and a torque T that are expressed by the
equation 1. Within a magnetic field, any type of object
with magnetic qualities will develop a torque and force.
The torque obtained is proportional to the intensity of
the magnetic field and provides direction to the object,
which allows it to align with the generated magnetic
Magnetic Three-dimensional Pose Control System for Micro Robots in the Human Head
67

field. The magnetic force is directly proportional to
the gradient of the magnetic field, and allows the
movement of the object to a certain place. The
calculation of the magnetic pair, which aligns the
microrobot magnet to the applied field is determined
by the following equation
=.(
.∇)
(1)
=
×
(2)
Where do you have:
•
: vector of the general strength of the robot.
• V: volume of the robot.
•
: robot magnetization vector.
• ▽: magnetization gradient.
• T: torque needed by the micro robot.
•
: magnetic field vector.
You can express the equation 2 in a more
intuitive and useful way:
=
(
)
+
(
)
+
×[
(
)
+
(
)
+
]
(3)
Where Mx, My and Mz denote the
magnetization value of each axis (Cao et al. (2012)).
3.2 Maxwell Coils
The Maxwell coils consist of two coils side by side
that generate a certain amount of current which goes
in opposite directions to drive the objects determined
by the user. They are used to a large extent when
working on magnetic propulsion projects, since they
generate constant magnetic gradients to produce
uniform propulsion forces at the center of the coil
(Cao et al., 2012). The magnetic flux density and its
gradient, associated with the arrangement of
Helmholtz and Maxwell coils along the main axis,
can be approximated to a constant value. Therefore,
said quantities will depend directly on the current
applied to the system, by the following equations:
=
8
5
√
5
0
=∗
(4)
∇∗=
48
√
3
49
√
7
0∗
=∗
(5)
Where:
• NH: number of laps of the pair of Helmholtz coils.
• RH: radius of the Helmholtz coil pair.
• IH: current obtained in the pair of Helmholtz coils.
• k: constant value.
• ▽: magnetization gradient. • B: magnetic field.
• µ0: constant value.
• NM: number of turns of the Maxwell coil pair.
• RM: radius of the Maxwell coil pair.
•
: current vector obtained.
• IM: current obtained in the pair.
Where k and g are proportional coefficients,
which depend on the radius of the coils and the
number of turns for Helmholtz and Maxwell
respectively. In order to simplify the model, it is
assumed that the robot is a solid disk, immersed in a
liquid with a small Reynolds number (the Reynolds
number is a dimensionless quantity that has the same
value in any coherent system of units and allows to
determine if a fluid is laminar or turbulent),
perpendicular to its axis. With that consideration, the
drag force in a closed space can be approximated by:
=
4
20
−
1
4
0
(6)
Where
•
: drag force vector.
• µd: dynamic viscosity of the fluid.
• v: speed handled by the micro robot.
• r: robot radio.
• d0: distance from the center of the micro robot to the
space where it is confined
• h: thickness of the micro robot.
On the plane, the forces present are summarized
below:
+
=
(7)
Where:
• Fmag: magnetization force.
•
: drag force vector.
• m: mass of the micro robot.
• : acceleration of the microrobot in the XYZ
plane.
4 PROPOSED MATHEMATICAL
MODEL
For this project, the system is considered as a black
box as shown below in the Figure 1.
Where:
• θ y φ: position angle of the micro robot with
respect to the Maxwell and Helmholtz coils.
• M: magnetization of the micro robot.
• F: force with which the micro robot moves.
• BM, BHx, BHy, BHz: parameters of the Maxwell
and Helmholtz coils as the number of laps they carry
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
68
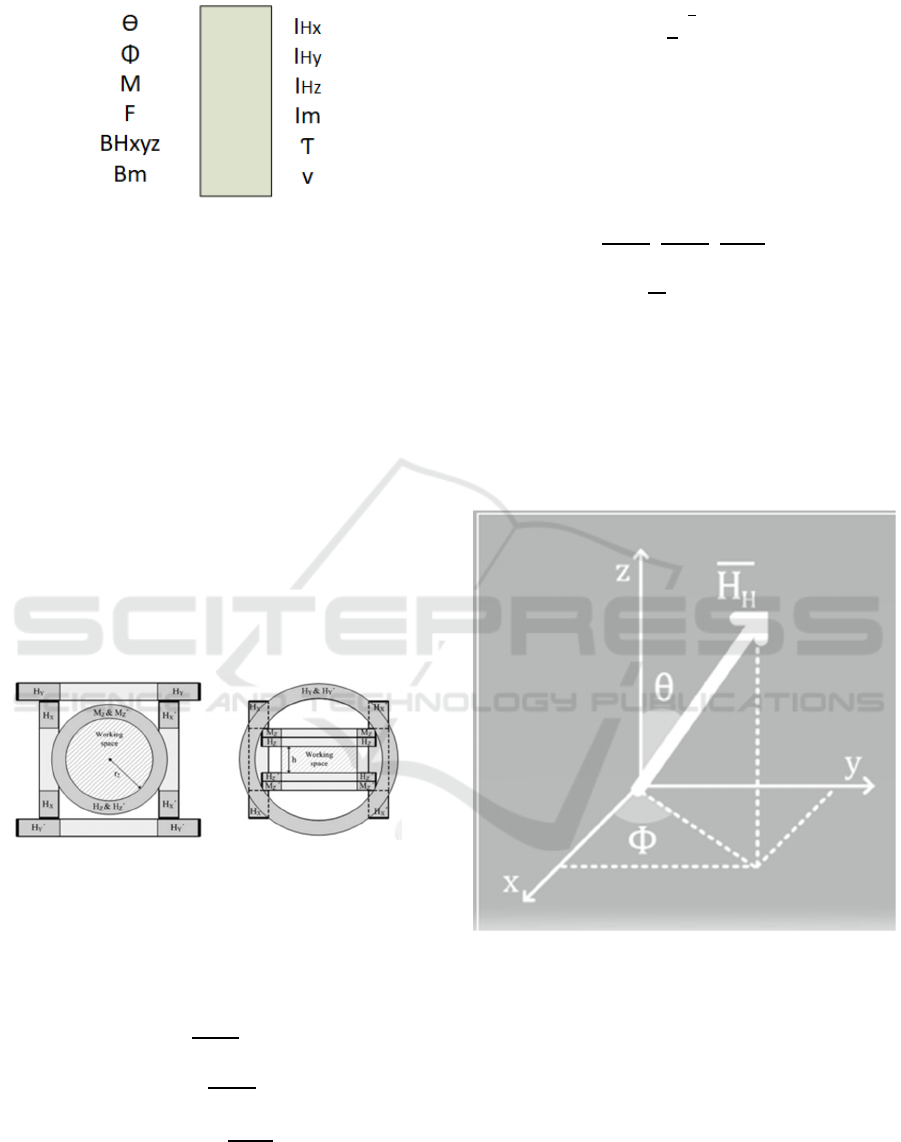
Figure 1: Output input system for Maxwell and Helmholtz
coils.
and the radius of these.
• IHx: current of the Helmholtz coils on their x axis.
• IHy: current of the Helmholtz coils on their y axis.
• IHz: current of the Helmholtz coils on their z axis.
• IM: current of the Maxwell coils.
• τ: torque needed by the micro robot.
• V: speed that the micro robot carries when moving.
The arrangement of the coils to be used is the one
proposed by (Choi et al., 2013), is represented in
Figure 2. In this we can see a Helmholtz type
configuration that is located along an axis, separated by
a distance dh that is equal to its radius rh. There is also
a pair of Maxwell coils whose separation in their
electromagnets, dm is √3rm, being rm the radius of
the coils, with the flow of the currents in opposite
directions.
Figure 2: Representation in blocks of the proposed system,
taken from (Choi et al., 2013).
The magnetic field produced by a pair of
Helmholtz coils of the x axis can be determined by
the law of Biot-Savart, this is supported by (Jeon et
al., 2010) and is described below:
=.
.
,0,0
(8)
=0,.
.
,0
(9)
=0,0,.
.
(10)
The following is the value of the constant k,
(Jeon et al., 2010):
=
4
5
(11)
It is known that the total magnetic field is
compounded by the sum of the partial magnetic fields,
that is, those related to the axes x, y and z. It is obtained
that:
= ++
(12)
From where it can be calculated that:
=
.
,
.
,
.
(13)
4.1 Calculation of Modified Maxwell
and Helmholtz Currents
In Figure 3 can see the proposed Cartesian plane in
which angles will be used for the mathematics of the
project.
Figure 3: Proposed Cartesian plane.
Taking into account the equations 3, 14, 15 and 16
are obtained:
=
(14)
=∅
(15)
=
(16)
Calculating in this way the equation 17 that ends
up being the magnetic field generated by the
Helmholtz coils.
Magnetic Three-dimensional Pose Control System for Micro Robots in the Human Head
69

=
.
.∅
(17)
It proceed to equal HH, which is founding the
equations 13 and 17, it is then expressed in a vectorial
way and the equations of x, y and z are separated, then
the following is obtained:
.
.
.
=
.
.∅
(18)
Reorganizing get that:
.
=∅
(19)
.
=∅
(20)
.
=
(21)
Taking into account all the mathematics raised
above, the currents for the Helmholtz coils will be
calculated. It is important to remember that this is a
fundamental part of a research, since those currents
would be the same as the real system could come to
use. The equations 22, 23 and 24 will be those that
show the currents that will be needed in the three pairs
of Helmholtz coils:
=
∅
(22)
=
∅
(23)
=
(24)
Now, it proceed to calculate the torque
generated by the Helmholtz coils, which is
represented in the following equation:
=
[
×
]
(25)
=0
[
×
]
(26)
=.0.
|
|
.
|
|
.
(27)
Where, V is the volume of the micro robot, µ0
is the permeability of the medium and M is the
magnetization constant. Next, the mathematics used
for the Maxwell coils used in the system will be
explained. First, the magnetic field generated by the
Maxwell coils is calculated as follows:
=−
1
2
,−
1
2
,
(28)
Where gm is a constant that contains the
following equation:
=
.
(29)
From where it can be seen that:
=
16
3
3
7
(30)
By operating the previously described, it is
obtained that:
=
2()
[
−,−,2
]
(31)
It proceed to calculate the gradient of the
Maxwell field and it obtain that:
∇=
2
[
−1,−1,2
]
(32)
The rule is applied, to obtain the magnitude of
▽ Hm and it can be seen:
|
∇
|
=
2
√
1+1+4
(33)
|
∇
|
=
(34)
Where K is:
=
16
3
3
7
3
2
(35)
Now, it is necessary to calculate the force with
which the micro robot goes to a place:
=
.∇
(36)
|
|
=
.∇
(37)
=
.∇
(38)
=.
|
|
.
|
∇
|
(39)
Now, the equation 34 replaces the equation 39
and it get:
=
|
|
(40)
Finally it proceed to clear Im, to obtain the
current of the Maxwell coils:
=
|
|
(41)
With this, the calculation of the current that
would be used by the Helmholtz and Maxwell coils is
terminated.
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
70
5 ANTHROPOMETRY OF THE
HUMAN HEAD
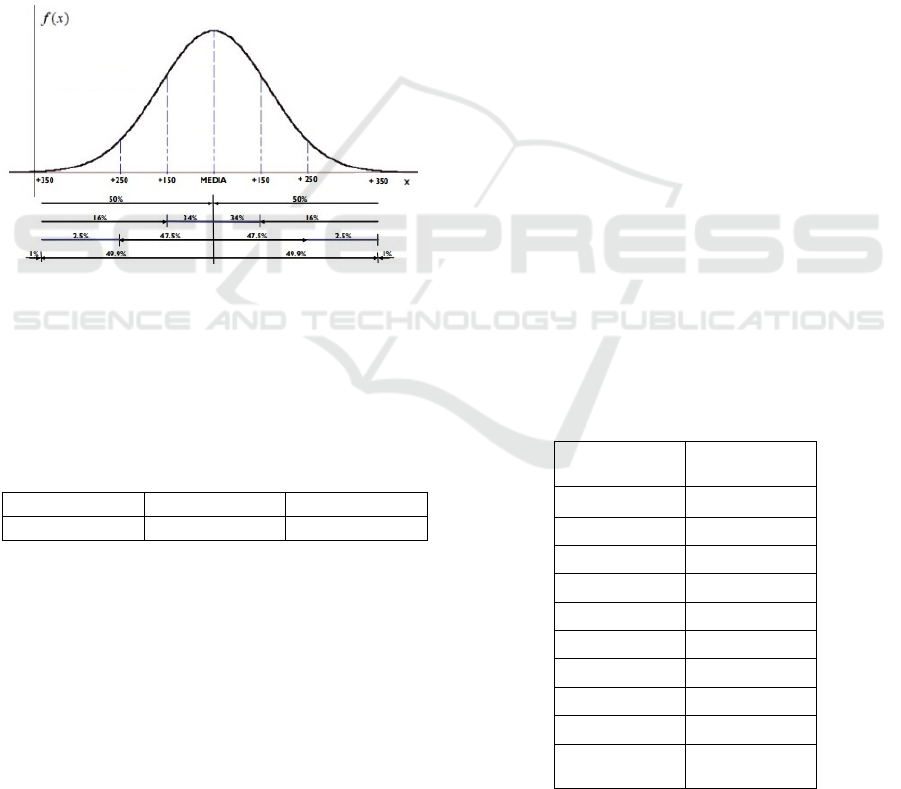
Most of the dimensions of the human body, like natural
phenomena and other events in nature, are distributed
normally, that is, according to the Gaussian distribution
(Avila et al., 2007). Many continuous random variables
have a density function whose graph is bell-shaped, as
seen in 4. Normally, in a mostly homogeneous
population, the distribution of any of its
anthropometric dimensions is normal and, therefore,
estimates, calculations and, in general, any statistical
procedure, can be carried out according to the
properties of this distribution, which is very convenient
given the ease that the treatment of this distribution
supposes.
Figure 4: Example of normal distribution curve.
To carry out the simulation system, the
anthropometry analysed by ( Avila et al., 2007) from
which the case study was taken of people between 18
and 65 years old, where the anthropometry of workers
was analysed. From this study we obtain the table 1:
Table 1: Anthropometry table of the human head.
Length (mm) Width (mm) Height (mm)
150 176 281
Considering the table 1 the measurements of a
three-dimensional model of a human head using the
Blender software were rearranged. Once this
modified head was obtained, a cavity was made in it
simulating the arachnoid space (which is where the
micro robot will move) and placing the human brain
in the middle of said space. A complete platform was
simulated in the Unity video game engine, where the
user can see moving the micro robot at will and also
see the current that it would need in the Helmholtz
and Maxwell coils. Unity3D is a development engine
for the creation of games and interactive 3D content,
it is fully integrated and offers many features to
facilitate the development of video games. It is
available as a development platform for Microsoft
Windows, OS X, Linux. The purpose of this
experiment is give direction a micro robot according
to magnetic field’s direction, to later implement a
force and analyse how much current could be needed
and all this in a simulation of the arachnoid area of
the human head. It is a fact that the arachnoid area is
a very small region of the brain and it would be
important to have an object that can be controlled and
moved artificially by means of the mathematics
previously described, this in order to expand the
medical barriers, and that future, there are many
functionalities that can be achieved in bioengineering.
6 RESULTS
Once the scene in Unity was developed, a series of
tests were carried out in which it was sought to
analyze the necessary current of the Helmholtz and
Maxwell coils to move the micro robot depending on
the angles θ y φ, which are changed by the user as the
application is running.
The parameters shown in Table 2 refer to the
characteristics of the microbot and the coils that are
needed for the development of this project and that
can be changed by the user as he or she wants to
change the focus of the investigation. For this, the
user must first know the area of the human body that
he wants to analyze and the measures that
characterize it, since the data that is entered into the
software must be exact.
Table 2: Table of environment parameters and proposed
micro robot.
Strength
magnetic field
0.01 Newton
3183 A / m
N laps Hx
340
N spins Hy
110
N turns Hz
340
Radio Hx
0.09 m
Radio Hy
0.09 m
Radio Hz
0.085 m
N spins M
6000
Radio M
0.145 m
Mag Mr
0.145 m
Radio Mr
500 µ m
Where:
• Hx: Helmholtz coil in x.
• Hy: Helmholtz coil in y.
• Hz: Helmholtz coil in z.
Magnetic Three-dimensional Pose Control System for Micro Robots in the Human Head
71
• M: Maxwell coil.
• Mr: micro robot.
• Mag: magnetization.
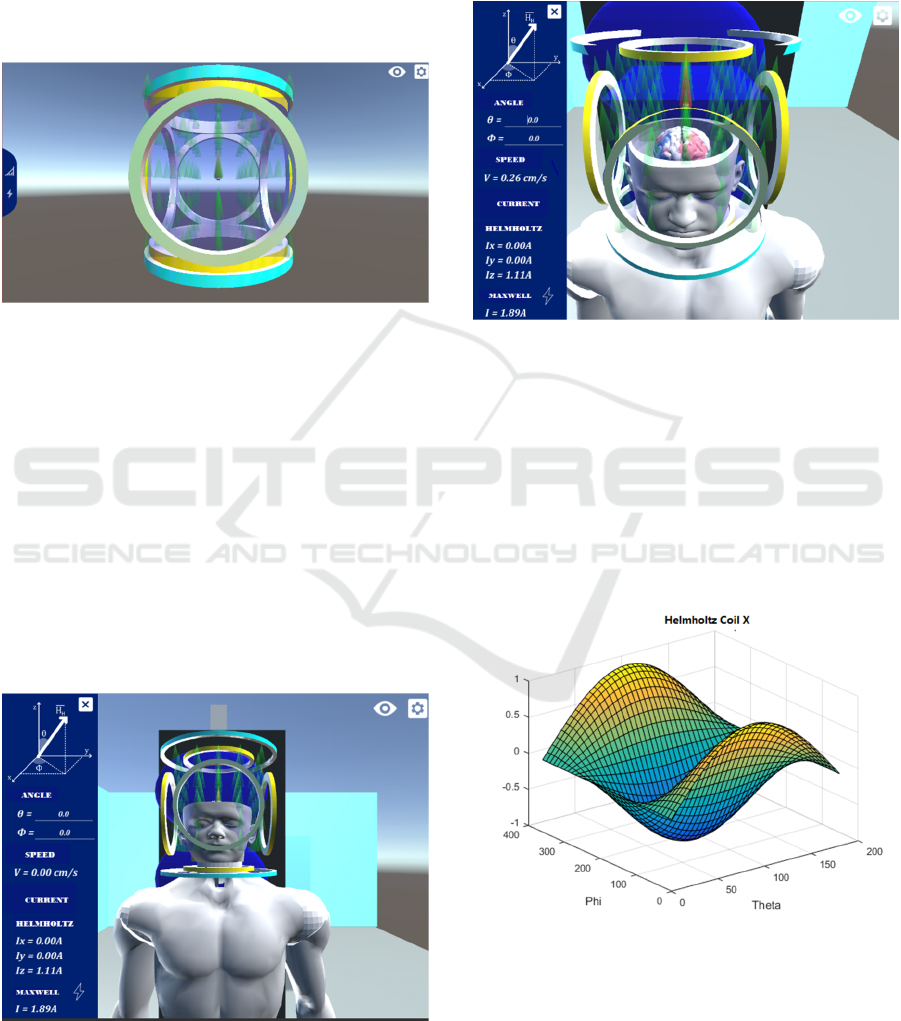
In the proposed interface in Figure 5 the
arrangement of coils to be used is shown, the yellow
coils are the Helmholtz coils and the blue coils are the
Maxwell coils. On the left side, there is a small panel
that, when pressed, returns the values that will be of
interest to the user, such as current, speed, and angles.
Figure 5: Initial scene.
Initially it can be seen magnetic field lines in
Figure 6 without aligning, the user must then indicate
with the keys of his computer where he wants them to
be aligned, and the micro robot will rotate to that
position; the micro robot is represented by a small
point (whose size the user can modify) and the
direction in which it goes is characterized by a red
vector, being the green ones, the vectors of the
generated magnetic field. Subsequently, a force must
be
applied in the micro robot (the magnitude of this is
variable and it is advisable to specify it before moving
the micro robot) that will take it to a position of the
working area that can be in the “x” axis, and “y”axis or
“z” axis.
Figure 6: Unfolded scene.
Figure 7 shows the interior of the proposed
human head, which, as mentioned above, has at its
center the brain and a space between it and the walls
that represent the arachnoid section. At this point,
only current on the ”z” axis is evident since the
magnetic field lines are only directed on this axis.
Figure 7: View of the brain inside the skull.
Once the user has handled the software, the results
returned by the user will be analysed through Matlab.
Matlab is a mathematical software tool that offers an
integrated development environment (IDE) with a
programming language of its own (M language),
allows the analysis of results to subsequently graph
them, in this way it can see in a three-dimensional
image the results that are obtained. Below
is the graph
that shows how the current in the Helmholtz coils behaves on
its axis “x”, “y” and “z”.
Figure 8: Current obtained in the Helmholtz coils, x axis.
The peak of the currents in the Helmholtz coils
corresponding to the x axis and shown in Figure 8 is
reached when the angles θ and φ reach the values of
0◦ and 360◦ respectively. This means that when the
microrobot reaches these angles, it will need the largest
number of current, this explanation applies in the same
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
72

Figure 9: Current obtained in the Helmholtz coils, axis y.
Figure 10: Current obtained in the Helmholtz coils, z-axis.
way for the other coil arrangements explained here. In
Figure 9 it is seen how the peaks of the currents are
reached when the angles θ and φ reach 90◦ in both
cases. In Figure 10 the peak of the currents is reached
when θ and φ are in values of 0◦ and 360◦ respectively.
The currents obtained for the proposed working area
and for the characteristics of the micro robot are the
following:
Table 3: Currents obtained.
Hx 1.1A
Hy 1.1A
Hz 1.1A
M 1.8A
The currents obtained in this system are not large
compared to those recorded by other studies where they
also use sets of coils, for example the one made by (Jeon et
al. (2010)) where currents of 100A, 85.1A and 68.8A are
reached, although keeping the proportions, because the
aforementioned coil arrangement is not similar to the one
proposed in this study. It is important to clarify that these
flows are equivalent to those necessary according to the
data that the user previously entered in the proposed
software and that correspond to a specific working area;
also, it is difficult to make a comparison with respect to the
amount of current that the system might need, since there is
not much information about a magnetic navigation study of
a microrobot in the arachnoid area of the human brain or
using the proposed current array in this studio.
7 CONCLUSIONS
This article showed the implementation of a simulated
magnetic navigation system that aligns a micro robot
to the lines of the magnetic field created as desired by
the user, a force is applied and subsequently the device
moves to a certain position in the work area, which is
the arachnoid area of the human head. The system
consists of an arrangement of three Helmholtz coils
and a pair of stationary Maxwell coils, a human body
modelled in Blender whose head has the
aforementioned real measurements; also has a panel
located on the left side of the screen where the angles
that the micro robot has in real time, the speed it takes
(to ensure that it handles a speed appropriate for a job
in real life) and the current in the three coils of
Helmholtz and the Maxwell coil. For this purpose,
equations were used so that the tool designed in
Unity development engine would show the results
and move the micro robot. The micro robot moves
in a simulated area such as the arachnoid area human
head at the users will according to the requirements
that the user placed at the beginning of the
simulation. The tool proves that by having
technological means it could have a micro robot that
can easily navigate in this area of human head to be
able to download other types of treatments, and this
way be able to fight different types of diseases and
thus, expand the borders of biomedicine.
Further works will concern the implementation of
this system in a physical model, to compare the results
obtained in the simulation and the real ones, also
proposes the idea of testing the algorithm in another
work scenario taking into account that the
requirements of the coils change according to the
working area.
REFERENCES
Abbott, J. J., Peyer, K. E., Lagomarsino, M. C., Zhang, L.,
Dong, L., Kaliakatsos, I. K. & Nelson, B. J. 2009, ‘How
should microrobots swim?’, The international Journal of
Robotics Research 28, 1434–1447.
Magnetic Three-dimensional Pose Control System for Micro Robots in the Human Head
73

Avila, R., Prado, L. and Gonza´lez, E. 2007, ‘Dimensiones
antropométricas de la poblacio´n latinoamericana’,
México, Universidad de Guadalajara, Centro
Universitario de Arte, Arquitectura y Diseño, División de
Tecnología y Procesos, Departamento de Produccio´n y
Desarrollo, Centro de Investigaciones en Ergonomía .
Cao, Q., Han, X., Zhang, B. and Li, L. 2012, ‘Analysis and
optimal design of magnetic navigation system using
helmholtz and maxwell coils’, IEEE Transactions on
Applied Superconductivity 22(3), 4401504–4401504.
Choi, H., Cha, K., Jeong, S., Park, J.-o. and Park, S. 2013, ‘3-
d locomotive and drilling microrobot using novel
stationary ema system’, IEEE/ASME Transactions on
Mechatronics 18(3), 1221–1225.
Choi, H., Choi, J., Jeong, S., Yu, C., Park, J.-o. and Park, S.
2009, ‘Two dimensional locomotion of a microrobot
with a novel stationary electromagnetic actuation
system’, Smart Materials and Structures 18(11), 11–17.
Creighton, F.M. and Burgett, S. 2006, ‘Magnetic navigation
system’. US Patent 7.019.610.
Dario, P., Carrozza, M. C., Benvenuto, A. and Menciassi, A.
2000, ‘Micro-systems in biomedical applications’,
Journal of Micromechanics and Microengineering 10(2),
235.
Duffner, F., Schiffbauer, H., Glemser, D., Skalej, M. and
Freudenstein, D. 2003, ‘Anatomy of the cerebral
ventricular system for endoscopic neurosurgery: a
magnetic resonance study’, Acta Neurochirurgica
145(5), 359– 368.
Elwenspoek, M. and Wiegerink, R. 2012, Mechanical
microsensors, Springer Science and Business Media.
Flynn, A. M., Udayakumar, K., Barrett, D. S., McLurkin, J.
D., Franck, D. L. and Shectman, A. 1998, ‘Tomorrow’s
surgery: micromotors and microrobots for minimally
invasive procedures’, Minimally Invasive Therapy and
Allied Technologies 7(4), 343–352.
Ha, Y. H., Han, B. H. and Lee, S. Y. 2010, ‘Magnetic
propulsion of a magnetic device using three
squarehelmholtz coils and a square-maxwell coil’,
Medical and bBological Engineering and Computing
48(2), 139–145.
Jeon, S., Jang, G., Choi, H. and Park, S. 2010, ‘Magnetic
navigation system with gradient and uniform saddle coils
for the wireless manipulation of micro-robots in human
blood vessels’, IEEE transactions on magnetics 46(6),
1943–1946.
Jeong, S., Choi, H., Choi, J., Yu, C., Park, J.-o. and Park, S.
2010, ‘Novel electromagnetic actuation method for 3-
dimensional locomotion of intravascular microrobot’,
Sensors and Actuators A: Physical 157(1), 118–125.
Joseph, J. V., Arya, M. and Patel, H. R. 2005, ‘Robotic
surgery: the coming of a new era in surgical innovation’,
Expert review of anticancer therapy 5(1), 7–9.
Kosa, G., Shoham, M. and Zaaroor, M. 2007, ‘Propulsion
method for swimming microrobots’, IEEE Transactions
on Robotics 23(1), 137–150.
Kummer, M. P., Abbott, J. J., Kratochvil, B. E., Borer, R.,
Sengul, A. and Nelson, B. J. 2010, ‘Octomag: An
electromagnetic system for 5-dof wireless
micromanipulation’, IEEE Transactions on Robotics
26(6), 1006–1017.
Moore, K. L. and Dalley, A. F. 2009, Anatom´ıa con
orientacio´n cl´ınica, Ed. Médica Panamericana.
Murphy, W., Black, J. and Hastings, G. W. (2016),
Handbook of biomaterial properties, Springer.
Nelson, B. J., Kaliakatsos, I. K. and Abbott, J. J. 2010,
‘Microrobots for minimally invasive medicine’, Annual
review of biomedical engineering 12, 55–85.
Pardridge, W. M. 2003, ‘Blood-brain barrier drug targeting:
the future of brain drug development’, Molecular
interventions 3(2), 90.
Purdy, P. D., Fujimoto, T., Replogle, R. E., Giles, B. P.,
Fujimoto, H. and Miller, S. L. 2005, ‘Percutaneous
intraspinal navigation for access to the subarachnoid
space: use of another natural conduit for neurosurgical
procedures’, Neurosurgical Focus 19(1), 1–5.
Sendoh, M., Yamazaki, A., Chiba, A., Soma, M., Ishiyama,
K. and Arai, K. 2004, ‘Spiral type magnetic micro
actuators for medical applications’, pp. 319–324.
Thijssen, H., Keyser, A., Horstink, M. and Meijer, E. 1979,
‘Morphology of the cervical spinal cord on computed
myelography’, Neuroradiology 18(2), 57–62.
Webb, W., Penny, E., Sundstrom, L. and Shappell, R. 2007,
‘Helmholtz coil system’. US Patent App. 11/263,332.
Werp, P. R. and Creighton, F. M. 2010, ‘Magnetic navigation
system’. US Patent 7.774.046.
Westebring-van der Putten, E. P., Goossens, R. H.,
Jakimowicz, J. J. and Dankelman, J. 2008, ‘Haptics in
minimally invasive surgery–a review’, Minimally
Invasive Therapy & Allied Technologies 17(1), 3–16.
Yesin, K. B., Vollmers, K. and Nelson, B. J. 2006, ‘Modeling
and control of untethered biomicrorobots in a fluidic
environment using electromagnetic fields’, The
International Journal of Robotics Research 25(5-6), 527–
536.
Yu, C., Kim, J., Choi, H., Choi, J., Jeong, S., Cha, K., Park,
J.-o. and Park, S. 2010, ‘Novel electromagnetic actuation
system for three-dimensional locomotion and drilling of
intravascular microrobot’, Sensors and Actuators A:
Physical 161(1-2), 297–304.
Zhang, L., Abbott, J. J., Dong, L., Kratochvil, B. E., Bell, D.
and Nelson, B. J. 2009, ‘Artificial bacterial flagella:
Fabrication and magnetic control’, Applied Physics
Letters 94(6), 14–17.
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
74
