
Visitors Localization in Natural Sites Exploiting EgoVision and GPS
Filippo L. M. Milotta
1,∗
, Antonino Furnari
1,∗
, Sebastiano Battiato
1
,
Maria De Salvo
2
, Giovanni Signorello
2
and Giovanni M. Farinella
1,2
1
University of Catania, Department of Mathematics and Computer Science, Via Santa Sofia - 64, Catania 95125, Italy
2
University of Catania, CUTGANA, Viale A. Doria 6, Catania 95123, Italy
{mdesalvo, g.signorello}@unict.it
Keywords:
Egocentric (First Person) Vision, Localization, GPS, Multimodal Data Fusion.
Abstract:
Localization in outdoor contexts such as parks and natural reserves can be used to augment the visitors’
experience and to provide the site manager with valid analytics to improve the fruition of the site. In this
paper, we address the problem of visitors localization in natural sites by exploiting both egocentric vision and
GPS data. To this aim, we gathered a dataset of first person videos in the Botanical Garden of the University
of Catania. Along with the videos, we also acquired GPS coordinates. The data have been acquired by 12
different users, each walking all around the garden for an average of 30 minutes (i.e., a total of about 6 hours
of recording). Using the collected dataset, we show that localizing visitors based solely on GPS data is not
sufficient to understand the location of the visitors in a natural site. We hence investigate how to exploit
visual data to perform localization by casting the problem as the one of classifying images among the different
contexts of the natural site. Our investigation highlights that visual information can be leveraged to achieve
better localization and that Egocentric Vision and GPS can be exploited jointly to improve accuracy.
1 INTRODUCTION
Localizing visitors in natural sites can be useful in
many ways. The information about the position of
a visitor can be used to augment the tour experience
(e.g., describing plants that can be observed at a spe-
cific location). Also, the collected information can
provide the site manager with valid data useful to un-
derstand the visitors’ behaviour and to improve the
services of the site. Last, but not least, localization
may be useful also for safety reasons, being a valua-
ble technology to retrieve the position of the users in
wide natural outdoor environments, where it may be
easy for a visitor to get lost.
Despite the fact that GPS is a popular technology
to perform localization outdoor, we found that GPS
information is not suitable for supporting the loca-
lization of the visitors of a natural site in a reliable
way. This is due to many factors which limit the loca-
lization accuracy, such as trees covering the sky and
the occasional presence of indoor spaces, like, for in-
stance, green-houses. An alternative technology to
localize the visitors of a natural site is provided by
image based localization. In particular, egocentric vi-
*
These authors contributed equally to this work.
sion offers a convenient setting to collect visual infor-
mation of the visits which can be used to aid localiza-
tion and, more in general, to understand the behavior
of the visitors to answer questions like “What are the
most common paths chosen by visitors?”, “What are
the most viewed points of interests?”, or “Are there
important points of interest that, for some reason, are
not viewed by the visitors?”.
In this paper, we investigate the use of egocentric
vision as an aid for localization purposes. Visitors are
supposed to wear smart glasses able to acquire and
process videos from their point of view. The collected
visual information is employed to perform automatic
localization of the users in the natural site.
Our study compares solutions based on vision and
GPS to localize the visitors of a natural site and ex-
plores different modalities that can be combined to
improve the performance of a localization system. As
proposed in previous work (Starner et al., 1998; Wey-
and et al., 2016; Ragusa et al., 2019), we address lo-
calization as a classification task. In this setting, the
area of the natural site is divided into cells represen-
ting meaningful environments (e.g., “main entrance”,
“sicilian garden”, etc.). A classifier is then trained to
recognize the correct class given measurements form
556
Milotta, F., Furnar i, A., Battiato, S., De Salvo, M., Signorello, G. and Farinella, G.
Visitors Localization in Natural Sites Exploiting EgoVision and GPS.
DOI: 10.5220/0007484205560563
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 556-563
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

GPS and/or visual signals. Our goal is to design a sy-
stem for the localization of visitors in a natural site
which can run in embedded settings such as on wea-
rable and mobile devices. To this purpose, we com-
pare the considered methods taking into account loca-
lization accuracy, computational time, as well as the
amount of memory required by the system to perform
localization. To support the experiments, we acquired
a dataset of egocentric videos in the Botanical Garden
of the University of Catania
1
. The garden covers an
area of about 170×130 m
2
. The first person videos of
the dataset have been acquired using a Pupil 3D Eye
Tracker
2
. During the acquisition, a smartphone has
been employed to record the GPS location of the visi-
tor. Video and GPS measurements have been synced
in order to attach each video frame a specific set of
GPS coordinates. The area of the considered natural
site has been divided into 9 contexts relevant for the
visitors, in accordance with the experts and the ma-
nager of the site. Each frame of the dataset has been
labeled to indicate the context in which the frame was
captured.
Experiments show that performing localization
based solely on GPS information is not sufficient to
achieve reasonable performance on the considered da-
taset, whereas localization based on visual data achie-
ves better accuracy, albeit at a higher computational
cost. We also show that an improvement can be obtai-
ned by exploiting vision and GPS jointly at a slightly
higher computational cost. Specifically, the perfor-
med analysis points out that a vision based approach
requiring just 0.1MB allows to improve the accuracy
of localization systems based on GPS by 7.60% at a
negligible computational time (i.e., 4.71E–3 seconds
for image on CPU).
The remainder of the paper is structured as fol-
lows. An overview of the related works is given
in Section 2. The collected dataset is described in
Section 3. The proposed method and the experimen-
tal results are detailed in Sections 4 and 5 respectively.
Section 6 concludes the paper with final remarks and
insights for future research.
2 RELATED WORK
In this section we briefly review previous work rela-
ted to four lines of research relevant to this paper: (i)
computer vision in natural environments, (ii) localiza-
tion based on wireless and BLE devices, (iii) image-
1
Botanical Garden of the University of Catania: http:
//www.ortobotanicoitalia.it/sicilia/catania/ (4-Nov-2018)
2
Pupil 3D Eye Tracker Website: https://pupil-labs.com/
pupil/ (4-Nov-2018)
based localization, and (iv) localization based on both
images and GPS.
Computer Vision in Natural Environments. In
Kumar et al. (Kumar et al., 2012), a computer vision
system named Leafsnap has been proposed to recog-
nize leaves and to identify the species of 184 trees of
the North-eastern United States. This system is inte-
grated in a mobile application which allows users to
take pictures of leaves placed on a white sheet in order
to segment them and remove stems. The silhouettes
of the leaves are represented through histograms of
curvature over different scales. Leaves are then iden-
tified from their representation with a Nearest Neig-
hbors approach considering an intersection distance
measure.
Wagner et al. (Wegner et al., 2016) designed a fra-
mework to recognize trees in a urban context. The
framework has been specifically developed to match
aerial images of trees from Google maps with respect
to street view images. In this way, trees are assigned
positions on public street sides. The authors also re-
leased the “Pasadena Urban Trees” dataset containing
more than 100,000 images related to 80,000 trees tag-
ged with species and locations.
Van et al. (Van Horn et al., 2017) gathered a data-
set called “iNat2017” by employing iNaturalist expert
network
3
, which allows naturalists to map and share
photographic observations of biodiversity across the
world. The dataset contains images of more than
8,000 species acquired in natural places. The species
are characterized by high visual variability, high simi-
larity among species and a large number of imbalan-
ced and fine-grained categories. A challenge on this
dataset has been proposed by the authors to encourage
research on the field.
Joly et al. (Joly et al., 2017) collected the “Life-
CLEF” dataset and proposed a challenge on natural
species classification. The dataset is proposed toget-
her with four challenges: audio based bird identifi-
cation, image-based plant identification, visual-based
sea-related organisms monitoring and location-based
species recommendation.
The studies discussed above have proposed data-
sets and algorithms based on computer vision to ad-
dress specific issues in the domain of natural sites.
While most of these works addressed tasks related to
the classification of plants, in this work we consider
the problem of localizing the visitors of a natural site
using GPS and visual data.
3
iNaturalist Website: https://www.inaturalist.org/ (4-
Nov-2018)
Visitors Localization in Natural Sites Exploiting EgoVision and GPS
557

Localization based on Wireless and BLE Devices.
Localization can be performed employing several de-
vices and signals, such as antennas, RGB cameras,
mobile wireless devices (Alahi et al., 2015), and blu-
etooth low energy (BLE) (Ishihara et al., 2017b; Ishi-
hara et al., 2017a).
Alahi et al. (Alahi et al., 2015) developed a met-
hod to improve human localization based on GPS
employing a set of fixed antennas coupled with
fixed RGB cameras and mobile wireless devices (i.e.,
smartphones/beacons). The authors used a multimo-
dal approach in which visual information (RGB) is
considered jointly with wireless signals (W) obtaining
the so called RGB-W data. Signal trilateration and
propagation models are at the core of this wireless-
based approach. These signals are used jointly with
tracking methods in the RGB domain to localize users
in indoor environments.
Ishihara et al. (Ishihara et al., 2017b) have shown
how the user localization can be performed through a
beacon-guided approach, instrumenting the environ-
ment with bluetooth low energy (BLE) signals emit-
ters. The authors designed a method in which radio-
wave-based localization is combined with Structure
from Motion (SfM) starting from visual input. Ho-
wever, as stated by the authors, SfM is still a chal-
lenging task in a real world context (particularly in
natural outdoor scenarios) as it does not perform well
in environments with little to no distinctive visual fe-
atures or when there is a large amount of repetitive
features, like in a natural site (i.e., a garden with a
lot of plants as in our case). An improvement of the
approach as been proposed in (Ishihara et al., 2017a)
where inference machines have been trained on pre-
viously collected pedestrian paths to perform user lo-
calization. In this way, the authors managed to reduce
localization and orientation error with respect to their
previous method.
While the exploitation of Wireless and BLE de-
vices is convenient in indoor settings, this is not ge-
nerally the case in large outdoor and natural environ-
ments. The main problems due to the lack of existing
infrastructures (e.g., WiFi) and due to the difficulties
arising from the installation of specific hardware in
such settings. Therefore, in this paper, we consider
the exploitation of visual and GPS signal, which do
not require the installation of specific hardware in the
site.
Image based Localization. In this paper we ad-
dress localization of the visitors as a classification
problem, where each class represents a context of a
large outdoor natural place. This approach has been
already considered by other authors, as briefly sum-
marized in the following.
Furnari et al. (Furnari et al., 2017) considered the
problem of recognizing personal locations specified
by the user from egocentric videos. The segmentation
problem is addressed as an “open-set” classification
problem where the classes specified by the user have
to be identified and the other environments, which are
unseen during training, need to be rejected.
Body-mounted video cameras have been em-
ployed by Starner et al. (Starner et al., 1998) to lo-
calize users from first person images. Localization is
in this case considered at the room level in a “close-
set” scenario in which the users can move in a limited
set of environments.
Santarcangelo et al. (Santarcangelo et al., 2016)
have investigated the use of multimodal signals col-
lected from shopping carts to localize customers in a
retail store. The inferred location information is then
exploited fo infer the behavior of customers for mar-
keting purposes in a “Visual Market Basket Analysis”
scenario.
Ragusa et al. (Ragusa et al., 2018; Ragusa et al.,
2019) considered the problem of localizing the visi-
tors of a cultural site from egocentric video. In the
considered settings, museum curators and site mana-
gers could take advantage from the inferred informa-
tion to improve the arrangement of their collections
and increase the interest of their audience. The system
has been extended to automatically produce summa-
ries of the tours to be sent to the visitors of the cultural
site as digital memory.
Classification based localization has been studied
by Weyand et al. (Weyand et al., 2016). Specifically,
the authors presented PlaNet, a deep network able to
localize images of places through different cues such
as landmarks, weather patterns, vegetation, road mar-
kings, or architectural details.
Similarly to the aforementioned works, we tackle
localization as a classification problem, dividing the
space of interest into areas. Differently from the
above approaches, we explore the combination of
GPS and visual input to achieve better accuracy at a
low computational cost.
Joint Exploitation of Images and GPS for Loca-
lization. Previous works investigated the combina-
tion of GPS and vision to localize users in an envi-
ronment. Capi et al. (Capi et al., 2014) presented
an assistive robotic system to guide visually impaired
people in urban environments. Electronic navigation
aid is achieved through a multimodal approach: data
from GPS, compass, laser range finders, and visual
information are merged together and used for trai-
ning neural networks. The assistive robotic system
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
558

Figure 1: Topology of the natural site considered in this
work. The table in the bottom part of the figure reports
details on the 9 contexts highlighted in the map reported
at the top of the figure.
has been validated in a controlled environment, but
authors shown it is also capable to adapt to changes
in the environment (i.e., obstacles, slopes, shelves,
etc.). Other works jointly exploiting images and GPS
have been proposed in literature. As example, Na-
vCog (Ahmetovic et al., 2016) is a smartphone-based
system that performs an accurate real-time localiza-
tion over large spaces.
Similarly to the works discussed above, we inves-
tigate methods to combine GPS and vision. However,
differently from previous works, our study focuses on
the context of outdoor natural environments.
Figure 2: Illustration of the process to align GPS measu-
rements to the frames of the videos. Each video frame is
associated to the closest GPS measurement in time. This
implicitly defines variable-length time-slot, i.e., the boun-
daries marked with black dotted lines in the figure. All the
frames falling in the same time-slot are associated to the
same GPS measurement.
3 DATASET
The dataset used in this work has been collected as-
king 12 volunteers to visit the Botanical Garden of
the University of Catania. The garden has a length
of about 170m and a width of about 130m. In accor-
dance with experts, we defined 9 contexts of interest
which are relevant to collect behavioral information
from the visitors of the site (Fig. 1). The volunteers
have been instructed to visit all 9 contexts without any
specific constraint, allowing them to spend how much
time they wished in each context.
We asked each volunteer to explore the natural site
wearing a camera and a smartphone during their vi-
sit. The wearable camera has been used to collect
egocentric videos of the visits, while the smartphone
has been used to collect GPS locations. GPS data
has been later synced with the collected video frames.
As a wearable camera, we have used a Pupil 3D Eye
Tracker headset. Videos have been acquired at a reso-
lution of 1280×720 pixels and a framerate of 60 f ps.
GPS locations have been recorded using a Honor 9
smartphone. Due to the limitations of using GPS de-
vices when the sky is not clear or because of the pre-
sence of trees, GPS locations have been acquired at
a slower rate as compared to videos. Specifically, a
new GPS signal has been recoreded about every 14
seconds, depending on the capability of the device to
communicate with the GPS satellites. Leveraging vi-
deo and GPS timestamps stored during the data acqui-
sition, each frame is associated to the closest GPS
measurement in time. This leads to the replication
of a given GPS location over time as it is illustrated
in Fig. 2. Each frame of the egocentric videos has
been labelled to specify the context in which the vo-
lunteer was actually located during the visit (Fig. 1).
The labeling has been performed by experts using the
ELAN annotation tool
4
.
4
ELAN Website: https://www.mpi.nl/corpus/html/elan/
index.html (4-Nov-2018)
Visitors Localization in Natural Sites Exploiting EgoVision and GPS
559

Table 1: Number and percentages of training and test fra-
mes, as well as the total number of frames contained in the
dataset.
Training Test Total
Number of Frames 40, 436 23, 145 63, 581
Percentage w.r.t Total 63.59% 36.41% 100%
Using the described protocol, we collected and la-
beled almost 6 hours of recording, from which we
sampled a total of 63, 581 frames for our experiments.
The selected frames have been resized to 128×128
pixels to decrease the computational load. This image
size is coherent with previous work which highlights
that a resolution of 128×128 pixels is enough for con-
text recognition (Torralba, 2009).
The dataset has been partitioned by considering
about 64% of the data for training and the remaining
data for test. This is achieved using frames extrac-
ted from 12 videos acquired by 4 volunteers for trai-
ning, and frames belonging to the remaining 21 vi-
deos acquired by 8 volunteers for test. The videos
have been selected in order to obtain similar class dis-
tributions among the two sets. Table 1 summarizes
the number of frames belonging to training and test
sets as well as the total number of frames contained
in the dataset.
4 METHODS
We compared different approaches to localize the vi-
sitors of a natural site from GPS data and egocen-
tric images. We tackle localization as a classification
problem, hence we aim at building classifiers able to
identify the area in which the visitor is currently loca-
ted from the considered data. To localize visitors from
GPS data only, we train a Decision Classification Tree
(DCT). During training, we optimize the “maximum
height” parameter of the DCT performing a grid se-
arch in the range [1, 100]. Since a video frame can
correspond to multiple identical GPS positions (see
Section 3), the training set will contain duplicate sam-
ples with the same label, which we experienced de-
grading the performance of the DCT. Hence, in our
experiments, we removed duplicates from the training
set. It is worth to note that duplicates are not removed
when test set is used for evaluation purpose.
Localization using vision only is performed fine-
tuning a SqueezeNet architecture (Iandola et al.,
2016) pre-trained on the ImageNet dataset to classify
video frames according to the 9 considered contexts.
We choose the SqueezeNet architecture for its com-
pactness and the low computational cost required at
test time. The network is trained using Stochastic
Gradient Descent with a learning rate of 0.001 for 300
epochs and a batch size of 256. The model scoring the
best test accuracy among the different epochs is hence
retained to perform evaluation.
We also investigated 4 streamlined CNNs deri-
ved from SqueezeNet by considering subsets of its
layers. The employment of streamlined CNNs is ta-
ken into account to investigate the design of systems
which can efficiently combine GPS and vision when
the computational budget is low. This is motivated
by the need to deploy the localization system in em-
bedded settings as a complementary service. In such
cases, a low computational cost is required to save
battery and computational resources needed for other
services (e.g., to recognize plants). The streamlined
models have been obtained considering subsets of the
layers of the SqueezeNet architecture. Specifically,
we considered the first 6, 9 and 11 layers of the Squee-
zeNet architecture
5
. Fig. 3 summarizes the architec-
ture of SqueezeNet and highlights the subsets of lay-
ers considered to define the three streamlined CNNs.
Each of the networks is complemented with a classifi-
cation module which takes over the activations of the
final layer. The classification module is composed by
two layers: a convolutional layer generating 9 maps
and a global pooling layer computing the average of
each of the map and returning 9 class scores. The
latter two layers are initialized randomly, while all ot-
her layers have been pre-trained on ImageNet. We
refer to the considered architectures as SqueezeNet-6,
SqueezeNet-9, and SqueezeNet-11, respectively. The
networks are trained to perform classification from
images only using the same settings used for the full
SqueezeNet model, except for the batch size, which is
set to 512.
We finally explore how visual information and
GPS data can be combined to improve localization.
This is obtained by performing late fusion on the pro-
babilities computed by the DCT considering GPS data
and the ones predicted by the CNNs. Specifically, late
fusion is performed as a linear combination of the pro-
babilities predicted by the two models:
p
f
(c|x) = w
i
· p
i
(c|x) + w
g
· p
g
(c|x) (1)
where p
f
(c|x) is the final probability obtained by
late fusion for class c when observing the sample
x, p
i
(c|x) and p
g
(c|x) are the probabilities predicted
using respectively images and GPS data, w
i
and w
g
are weights regulating the contribution of each moda-
lity to the final prediction. We set w
i
= 2 and w
g
= 1
in our experiments, as they lead to best results.
5
We considered the SqueezeNet v1.1 model, as im-
plemented in Torchvision - https://github.com/pytorch/
vision/blob/master/torchvision/models/squeezenet.py
(4-Nov-2018)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
560
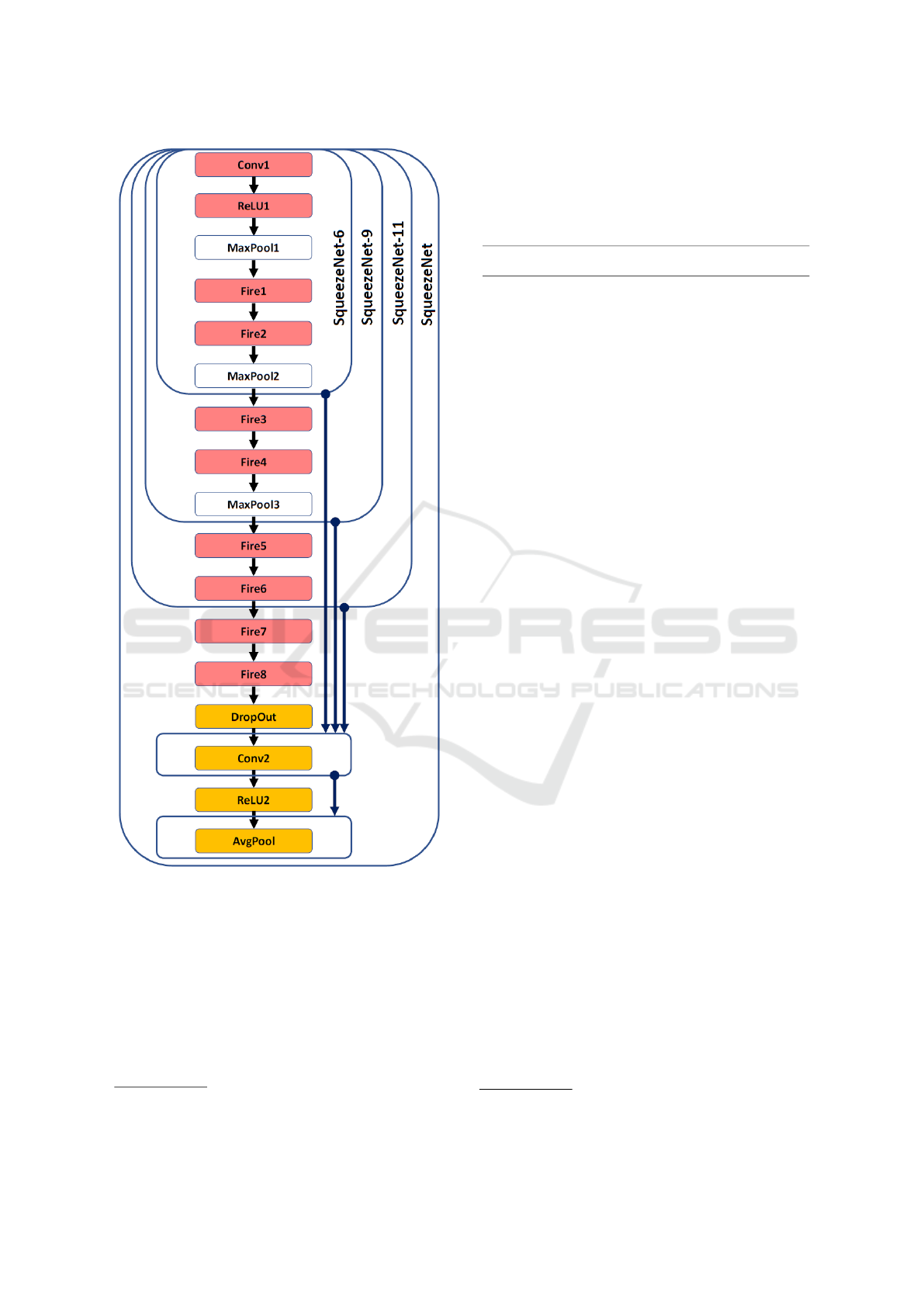
Figure 3: The SqueezeNet architecture and the considered
subsets of layers used to build streamlined CNNs for image-
based localization.
5 EXPERIMENTAL RESULTS
Table 2 compares the two considered methods to per-
form localization using only GPS data (DCT) and
only visual data (SqueezeNet) in terms of accuracy,
memory and computational time
6
. Best results are re-
6
All time measurements have been performed on CPU
using a four-cores Intel(R) Xeon(R) CPU E5-2620 v3 @
Table 2: Comparison between DCT, using only GPS to per-
form localization and SqueezeNet, using only vision to per-
form localization. For each model, we report the amount of
memory required, the computational time needed to process
a single sample and the accuracy on the test set.
Method Memory Time (s) Accuracy
DCT (GPS) 0.03 MB 1.30E − 07 78.76%
SqueezeNet (Vision) 2.80 MB 2.29E − 02 91.24%
ported in bold column-wise. Experiments pointed out
that, using only vision allows to greatly outperform
the classification method based only on GPS in the
considered experimental settings. This highlights the
noisy nature of GPS measurements in the considered
context and the potential of computer vision to ad-
dress localization. Nevertheless, the approach based
on GPS requires far less memory and runs many times
faster than the approach based on Squeezenet, which
may make it more suited to be deployed in embedded
devices despite the reduced performance.
Table 3 compares the performances of the met-
hods which combine through late fusion the results
of the DCT classifier based on GPS with Squeeze-
Net and the three streamlined CNNs SqueezeNet-
6, SqueezeNet-9 and SqueezeNet-11 based on visual
data. For each method, we report the amount of requi-
red memory, the computational time needed to pro-
cess one sample, the accuracy of the CNN, the late fu-
sion accuracy, the improvement of the fused classifier
with respect to DCT, and the improvement with re-
spect to the CNN. Best results and second-best results
are reported in bold and underlined numbers respecti-
vely. As can be seen from the table, the fusion bet-
ween SqueezeNet-6 and DCT allows to obtain an im-
provement of +7.6% with respect to DCT alone and
+4.58% with respect to the SqueezeNet-6 alone, sco-
ring a final accuracy of 86.36%, while requiring only
0.01 MB and 4.71E −03 seconds to process a sample.
While the accuracy of the CNNs improve with the
increasing number of layers, the improvements over
DCT and CNNs obtained by late fusion tend to drop
down. This indicates that the shallower models are
more kin to learn representations of the data which
are complementary with the rough localization alre-
ady provided GPS. Moreover, it should be noted that
deeper CNNs require more memory and computati-
onal time. SqueezeNet allows to obtain a boost of
about 5.63% with respect to the best of the proposed
architecture scoring an accuracy of 91.99%. Howe-
ver, it should be noted that the contribution of fusion
with DCT is rather modest (about +0.75%), which
suggests that SqueezeNet does not learn representa-
tions which are complementary to the available GPS
2.40GHz. Please note that higher computational times
should be expected in embedded settings.
Visitors Localization in Natural Sites Exploiting EgoVision and GPS
561
Table 3: Performances of the considered methods which perform classification using both images and GPS data. For each
method, we report the needed memory, the computation time required to process one sample, the accuracy of the CNN model,
the accuracy of the whole model after late fusion, the improvement with respect to the DCT alone, and the improvement with
respect to the CNN alone.
Model Memory Time (s) CNN Acc. Fusion Acc. Imp. wrt DCT Imp. wrt CNN
SqueezeNet-6 + DCT 0.1 MB 4.71E− 03 81.78% 86.36% +7.60% +4.58%
SqueezeNet-9 + DCT 0.5 MB 6.09E − 03 82.52% 86.32% +7.56% +3.80%
SqueezeNet-11 + DCT 1.4 MB 6.60E −03 85.78% 86.36% +7.02% +2.54%
SqueezeNet + DCT 2.8 MB 2.29E − 02 91.24% 91.99% +13.23% +0.75%
data. Moreover, it should be noted that this is achie-
ved with more expensive computation. Indeed, the
proposed SqueezeNet-6+DCT method requires 28 ti-
mes less memory and is 4.9 times faster than the com-
bination of SqueezeNet and DCT.
As a final remark, the results show how shallow
and computationally inexpensive CNN models can be
leveraged to greatly improve the performance of clas-
sifiers based on GPS by naturally learning comple-
mentary representations.
6 CONCLUSION
We investigated the use of GPS data and vision to lo-
calize people in natural outdoor contexts. To carry out
the study, we collected a dataset of egocentric videos
and GPS measurements in the Botanical Garden of
the University of Catania, Italy. The area of the con-
sidered natural site has been divided into meaningful
contexts and each frame of the dataset has been labe-
led according to the context in which the visitor was
actually located. We tackle localization as a classi-
fication problem and compare different methods ai-
ming at performing localization using only GPS data,
visual data and the combination of both modalities
through late fusion. Our investigation shows that: 1)
localization based on vision is more accurate than lo-
calization based on GPS in the considered context, but
requires more computational resources, which may
hinder its use in embedded settings; 2) the perfor-
mance of localization methods based on GPS can be
greatly improved by fusion with inexpensive shallow
CNNs derived from pre-trained networks.
Future works will be devoted to perform a more
thorough benchmark study of methods based on GPS
and CNNs on the proposed dataset. Moreover, in ac-
cordance with the experts, we will evaluate new pos-
sible labeling schemes to indicate the presence of con-
texts and subcontexts in the collected data. Other ef-
forts could also be dedicated to investigating more so-
phisticated ways to fuse GPS and visual information.
ACKNOWLEDGEMENTS
This research is supported by PON MISE - Horizon
2020, Project VEDI - Vision Exploitation for Data
Interpretation, Prog. n. F/050457/02/X32 - CUP:
B68I17000800008 - COR: 128032, and Piano della
Ricerca 2016-2018 linea di Intervento 2 of DMI of
the University of Catania. The authors would like to
thank Costantino Laureanti for his invaluable help.
REFERENCES
Ahmetovic, D., Gleason, C., Ruan, C., Kitani, K., Takagi,
H., and Asakawa, C. (2016). Navcog: a navigational
cognitive assistant for the blind. In Proceedings of the
18th International Conference on Human-Computer
Interaction with Mobile Devices and Services, pages
90–99. ACM.
Alahi, A., Haque, A., and Fei-Fei, L. (2015). Rgb-w: When
vision meets wireless. In Proceedings of the IEEE
International Conference on Computer Vision, pages
3289–3297.
Capi, G., Kitani, M., and Ueki, K. (2014). Guide robot in-
telligent navigation in urban environments. Advanced
Robotics, 28(15):1043–1053.
Furnari, A., Farinella, G. M., and Battiato, S. (2017).
Recognizing personal locations from egocentric vi-
deos. IEEE Transactions on Human-Machine Sys-
tems, 47(1):6–18.
Iandola, F. N., Han, S., Moskewicz, M. W., Ashraf, K.,
Dally, W. J., and Keutzer, K. (2016). Squeeze-
net: Alexnet-level accuracy with 50x fewer para-
meters and <0.5 mb model size. arXiv preprint
arXiv:1602.07360.
Ishihara, T., Kitani, K. M., Asakawa, C., and Hirose, M.
(2017a). Inference machines for supervised bluetooth
localization. In IEEE International Conference on
Acoustics, Speech and Signal Processing (ICASSP),
pages 5950–5954. IEEE.
Ishihara, T., Vongkulbhisal, J., Kitani, K. M., and Asakawa,
C. (2017b). Beacon-guided structure from motion for
smartphone-based navigation. In IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 769–777. IEEE.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
562

Joly, A., Go
¨
eau, H., Glotin, H., Spampinato, C., Bon-
net, P., Vellinga, W.-P., Lombardo, J.-C., Planque, R.,
Palazzo, S., and M
¨
uller, H. (2017). Lifeclef 2017
lab overview: multimedia species identification chal-
lenges. In International Conference of the Cross-
Language Evaluation Forum for European Langua-
ges, pages 255–274. Springer.
Kumar, N., Belhumeur, P. N., Biswas, A., Jacobs, D. W.,
Kress, W. J., Lopez, I. C., and Soares, J. V. (2012).
Leafsnap: A computer vision system for automatic
plant species identification. In European Conference
on Computer Vision, pages 502–516. Springer.
Ragusa, F., Furnari, A., Battiato, S., Signorello, G., and Fa-
rinella, G. M. (2019). Egocentric visitors localization
in cultural sites. Journal on Computing and Cultural
Heritage.
Ragusa, F., Guarnera, L., Furnari, A., Battiato, S., Signo-
rello, G., and Farinella, G. M. (2018). Localization
of visitors for cultural sites management. In Pro-
ceedings of the 15th International Joint Conference
on e-Business and Telecommunications - Volume 1:
ICETE,, pages 407–413. INSTICC, SciTePress.
Santarcangelo, V., Farinella, G. M., and Battiato, S. (2016).
Egocentric vision for visual market basket analysis. In
European Conference on Computer Vision Workshop
(EPIC), pages 518–531. Springer.
Starner, T., Schiele, B., and Pentland, A. S. (1998). Visual
contextual awareness in wearable computing. In Pro-
ceedings of the International Symposium on Wearable
Computing, pages 50–57.
Torralba, A. (2009). How many pixels make an image? Vi-
sual neuroscience, 26(1):123–131.
Van Horn, G., Mac Aodha, O., Song, Y., Shepard, A.,
Adam, H., Perona, P., and Belongie, S. (2017). The
iNaturalist challenge 2017 dataset. arXiv preprint
arXiv:1707.06642.
Wegner, J. D., Branson, S., Hall, D., Schindler, K., and Pe-
rona, P. (2016). Cataloging public objects using aerial
and street-level images-urban trees. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 6014–6023.
Weyand, T., Kostrikov, I., and Philbin, J. (2016). Planet-
photo geolocation with convolutional neural net-
works. In European Conference on Computer Vision,
pages 37–55. Springer.
Visitors Localization in Natural Sites Exploiting EgoVision and GPS
563
