
Real-time Automatic Tongue Contour Tracking in Ultrasound Video
for Guided Pronunciation Training
M. Hamed Mozaffari, Shuangyue Wen, Nan Wang and WonSook Lee
School of Electrical Engineering and Computer Science, University of Ottawa, Ottawa, Ontario, Canada
Keywords: Image Processing with Deep Learning, Ultrasound for Second Language Training, Ultrasound Video
Tongue Contour Extraction and Tracking, Convolutional Neural Network, Augmented Reality for
Pronunciation Training.
Abstract: Ultrasound technology is safe, relatively affordable, and capable of real-time performance. Recently, it has
been employed to visualize tongue function for second language education, where visual feedback of tongue
motion complements conventional audio feedback. It requires expertise for non-expert users to recognize
tongue shape in noisy and low-contrast ultrasound images. To alleviate this problem, tongue dorsum can be
tracked and visualized automatically. However, the rapidity and complexity of tongue gestures as well as
ultrasound low-quality images have made it a challenging task for real-time applications. The progress of
deep convolutional neural networks has been successfully exploited in various computer vision applications
such that it provides a promising alternative for real-time automatic tongue contour tracking in ultrasound
video. In this paper, a guided language training system is proposed which benefits from our automatic
segmentation approach to highlight tongue contour region on ultrasound images and superimposing them on
face profile of a language learner for better tongue localization. Assessments of the system revealed its
flexibility and efficiency for training pronunciation of difficult words via tongue function visualization.
Moreover, our tongue tracking technique demonstrates that it exceeds other methods in terms of
performance and accuracy.
1 INTRODUCTION
Communicative performance, self-confidence, and
social interaction of a speaker during a speech
depends on many elements. Correct pronunciation
and articulation of phonemes, words, and sentences
are two of those factors. Importance and challenging
part of this communication skill is even more
obvious for many language learners especially when
they cannot pronounce words difficult and rapid
tongue movements.
During articulation of words and sentences,
tongue gestures are of great interest as an aid in
Second language (L2) pronunciation learning and
rehabilitation (Chen et al., 2018). When at rest, the
tongue displays an unremarkable gross morphology,
but dynamically it is a highly mobile, deformable,
and precise organ, with rapid movements especially
over its tip. Automatic tracking of tongue
movements in recording ultrasound video of a long
speech is considered to be very difficult due to the
speckle noise in each frame, acoustic artifacts such
as shadowing and mirroring, and low signal-to-noise
ratio (Stone, 2005). Interpretation of ultrasound
tongue frames might become even harder when
tongue movements are fast, and the ultrasound frame
rate is relatively low. This often results in missing
parts in the observed contour (Loosvelt et al., 2014).
Recent studies have revealed that visual
feedback techniques such as ultrasound imaging can
assist individuals to acquire new language
pronunciation skills with higher efficiency
(Bernhardt et al., 2005; Wilson et al., 2006; Gick et
al., 2008; Abel et al., 2015). Ultrasound systems are
fast, safe, portable, relatively inexpensive, and
capable of real-time imaging. These capabilities
allow researchers to indirectly study subtle and swift
movements of the tongue during speech production
in different applications (Denby et al., 2010; Preston
et al., 2014; Geddes and Sakalidis, 2016).
Mid-sagittal view of ultrasound imaging is
usually adopted for illustration of tongue, as it
displays relative back, height, and the slope of the
tongue (Bernhardt et al., 2008). However,
302
Mozaffari, M., Wen, S., Wang, N. and Lee, W.
Real-time Automatic Tongue Contour Tracking in Ultrasound Video for Guided Pronunciation Training.
DOI: 10.5220/0007523503020309
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 302-309
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

localization and interpretation of tongue gestures in
ultrasound images is not an easy task for non-expert
users (see Figure 1, for the first time, one cannot
recognize exact location of the tongue in ultrasound
images). Therefore, highlighting tongue dorsum on
ultrasound data, in form of a curved contour which
is usually defined under the brightest and longest
continues region (Zharkova, 2013; Lee et al., 2015),
can significantly assist language learners to
recognize the tongue shapes.
Figure 1: The approximate position of the tongue when
producing a vowel. Sounds vary depending on tongue’s
position and shape which are not visible from outside.
Tongue surface can be seen as a bright region on
ultrasound image on the left.
So far, few language training systems have been
implemented utilizing ultrasound imaging
(Hoopingarner, 2005; Gick et al., 2008). Language
learners should first be involved in a pre-training
stage which helps them to comprehend the location
of the tongue in ultrasound videos data.
Our study aim is to provide a system to facilitate
second language pronunciation training by depicting
tongue function in real-time and recorded videos. A
face tracking method is utilized to find optimum
position of the tongue on face profile then they are
registered to create overplayed videos. Our language
training system attempts to alleviate the problem of
tongue localization in ultrasound data for non-expert
users utilizing our tongue tracking approach that
visualizes contour of the tongue, superimposed on
ultrasound video frames.
2 LITERATURE REVIEW
A variety of techniques have been tested for tongue
contour tracking in ultrasound images such as active
contour models (Ghrenassia et al., 2014; Laporte and
Ménard, 2015; Xu et al., 2016), graph-based
technique (Tang and Hamarneh, 2010), machine
learning-based methods (Tang et al., 2012; Fabre et
al., 2015), and many more (Laporte and Ménard,
2018). Manual labeling is essential for at least
initialization in those researches (Laporte and
Ménard, 2018) such that tongue tracking in real-time
is impossible also with using famous software
packages like EdgeTrak.
Up to now, research on deep learning methods
has stirred a great deal of attention, and It shows that
deep learning algorithms, particularly convolutional
neural network (CNN) (Xu et al., 2017), are
powerful enough for solving many problems in
pattern recognition and data mining, including
ultrasound tongue contour tracking (Laporte and
Ménard, 2018). In similar studies (Fasel and Berry,
2010; Berry and Fasel, 2011; Berry, 2012; Csapo
and Lulich, 2015; Jaumard-Hakoun et al., 2016),
tongue contour was extracted automatically using
deep belief networks (DBNs) and deep auto-encoder
(Ji et al., 2017).
The accuracy of deep learning methods is highly
related to the size of training dataset and the
complexity of the deep network model. Hence, there
is always a trade-off between the number of training
samples, which is a big issue in many applications
such as in medicine (Ronneberger et al., 2015;
Litjens et al., 2017), and the number of parameters
in the network, which it requires more computing
and memory units. Results of deep learning
techniques like U-net for medical image
segmentation illustrate acceptable accuracy.
However, due to the deep architecture with many
layers, computational resources should be highly
powerful in training and testing stages. For real-time
applications such as ultrasound tongue contour
tracking this performance, the issue is also more
fundamental.
In this paper, by inspiration from a famous
architecture, so-called "fully convolutional network"
(Badrinarayanan et al., 2015; Long et al., 2015;
Ronneberger et al., 2015), we propose a new simpler
architecture for real-time video tongue contour
tracking for using in our designed language training
system. The efficiency of our language training
system was tested by conducting experiments to
teach pronunciation of some difficult words.
3 SYSTEM ARCHITECTURE
AND METHODOLOGY
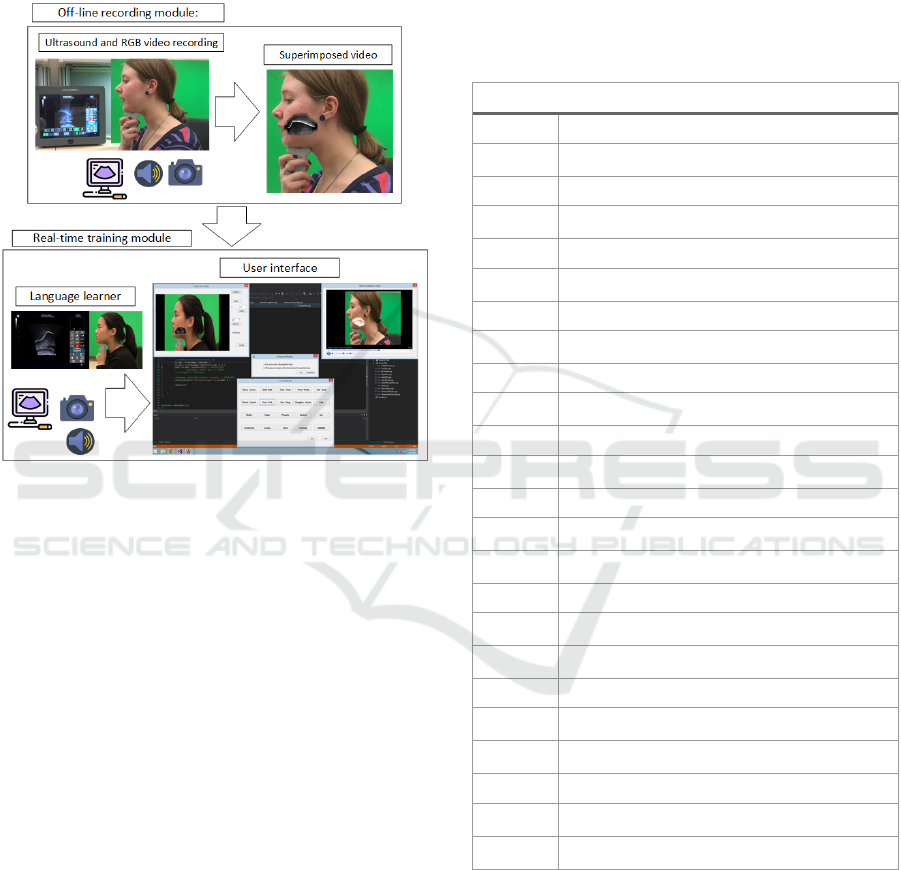
Main modules of our language pronunciation
training system are illustrated in Figure 2. In both
modules, the ultrasound data, contain tongue contour
information extracted by our proposed tracking
Real-time Automatic Tongue Contour Tracking in Ultrasound Video for Guided Pronunciation Training
303
method, are overlaid automatically on a video
recorded from face profile. In general, two
superimposed videos are played on a computer's
screen for a language learner, one from real-time
recording of him/his tongue and the other from an
instructor's tongue during speech.
Figure 2: Schematic of our language training system.
Language learner can see both off-line and real-time data
on a computer screen. The off-line video is played with a
small delay and language learner imitate that word. The
learner comprehends the differences between two videos
and tries to duplicate instructor's video.
3.1 Tongue Tracking and Extraction
Module
Tongue contour tracking in ultrasound video is a
unique problem such that according to our
experiments, the diversity of tongue data is restricted
to the flexibility and deformation states of the
tongue muscle. We proposed a deep learning
approach, employing CNN layers, capable to
address the real-time performance issue due to its
small architecture and training dataset (see Table 1).
In SegNet architecture (Badrinarayanan et al.,
2015), two consecutive convolutional layers are for
having a better receptive field, however, these extra
layers in each stage of encoding and decoding apply
a huge number of parameters to the network in
inference stage. We found that omitting one
convolutional layer in each stage of encoding and
decoding, improves architecture performance in
terms of speed though its accuracy is still
comparable with the original model. In our
architecture, we decreased many repeating
convolutional and deconvolutional layers of SegNet
as well as many activation functions by try and error
experiments. We also added concatenation strategy
from the U-net model (Ronneberger et al., 2015) for
increasing accuracy of the predictions.
Table 1: Our deep learning architecture (Conv:
convolution, Concate: concatenation).
N
etwork Architecture
Layers Specification (Down-sampling)
Conv 1
32 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Pool 1 Max-pooling with stride: 2×2
Conv 2
64 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Pool 2 Max-pooling with stride: 2×2
Conv 3
128 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Pool 3 Max-pooling with stride: 2×2
Conv 4
256 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Pool 4 Max-pooling with stride: 2×2
Conv 5
512 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Layers Specification (Up-sampling)
Un-pool 1
Max-un-pooling repeats the rows and columns by
size 2
Concate 1 Concatenate conv 4 outputs and un-pool 1
Conv 6
256 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Un-pool 2
Max-un-pooling repeats the rows and columns by
size 2
Concate 2 Concatenate conv 3 outputs and un-pool 2
Conv 7
128 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Un-pool 3
Max-un-pooling repeats the rows and columns by
size 2
Concate 3 Concatenate conv 2 outputs and un-pool 3
Conv 8
64 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Un-pool 4
Max-un-pooling repeats the rows and columns by
size 2
Concate 4 Concatenate conv 1 outputs and un-pool 4
Conv 9
32 (filters: 3×3, stride: 1×1, activation: ReLU,
p
addin
g
: “Valid”
)
Conv 10
1 (filters: 1×1, stride: 1×1, activation: Sigmoid,
p
addin
g
: “Valid”
)
The popular tongue tracking software, EdgeTrak,
is capable of providing tongue contours for a limited
number of frames with the requirement of manual
initialization near to the tongue region and tuning it
during the extraction process. In contrast, our
proposed model is significantly fast, needs a small
dataset for training, and it can automatically
delineate tongue contours in real-time from long
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
304

ultrasound videos without any manual initialization
or tuning.
As can be seen from Table 1, our proposed
network consists of repeated 3×3 convolutions with
no zero padding, each followed by a rectified linear
unit (ReLU). A 2×2 max pooling operation with a
stride of 2 is applied in each down-sampling step. In
decoding path, from the lowest contracted layer to
the output feature map, each layer consists of an up-
sampling of the feature map followed by a 2×2
convolution that halves the number of feature
channels, a concatenation with the correspondingly
cropped feature map from the corresponding
contracting path, and a 3×3 convolutions followed
by a ReLU. Our model has only 10 convolutional
layers (in contrast to 23 layers in U-net and 26 in
SegNet). For the sake of fair comparison, we did not
add data augmentation, a powerful strategy for
increasing the size of training data, and batch
normalization layers, a method for increasing the
performance and stability.
The result of the proposed method is a
segmented region on the ultrasound image, so we
need to extract contours for comparison with other
tongue contour tracking techniques. First, we
binarize the segmented tongue contour image with a
threshold value and then invoke the skeleton
extraction method to create thin curves out of the
binary image (see Figure 3).
Figure 3: samples of images in segmentation and
extraction process: (a) one original image (b) true label or
mask (c) predicted area (d) converted binary image (e)
contour skeleton of the white region of (d), (f)
superimposed image of original and extracted contour
(green curve).
3.2 Ultrasound Pronunciation Training
System Module
In order to test the potential utility of our language
training system in second language, a preliminary
investigation was conducted with two Chinese
students as participants. Three English native
speakers were considered as instructors and trained
to read predefined words. As Figure 2 shows,
recording procedures is a two-fold process. Off-line
recording module (see Figure 4) which a native
instructor sits in front of the system who reads a list
of predefined difficult words. In our experiment, list
of difficult words (see Table 2) was produced by
conducting a survey using questionnaires, among 20
Chinese students in University of Ottawa, asking
about the words which they have more difficulties to
pronounce in English.
Figure 4: An instructor is pronouncing a list of words and
her face and voice are recorded by the camera as well as
ultrasound video. Manually, cropped ultrasound video and
the tongue contour extracted (green line) from that video
are superimposed with the video from the camera.
In the second module, similarly, one student
keeps an ultrasound probe under his/her chin and
reads the list of predefined words to learn their
pronunciations (see Figure 5). Ultrasound video of
the tongue, RGB video from speaker's face profile,
and speech sound are captured in both modules.
During the training process, the learner observes
instructor video for each word and try to imitate the
instructor's tongue in ultrasound video which is
shown at the same time on screen with a sort of
delay. While the learner is reading the words, tongue
contour is superimposed and illustrated
automatically in real-time on ultrasound image
sequences. For overlaying videos, Haar feature
detection algorithm is applied to the RGB video to
find the area around the lips of the speaker. Then,
segmented ultrasound image sequences are
registered on the face profile.
Figure 5: A learner is pronouncing a list of words after
hearing the voice and watching the video from the
instructor. The white color line is extracted from
ultrasound data automatically.
Real-time Automatic Tongue Contour Tracking in Ultrasound Video for Guided Pronunciation Training
305
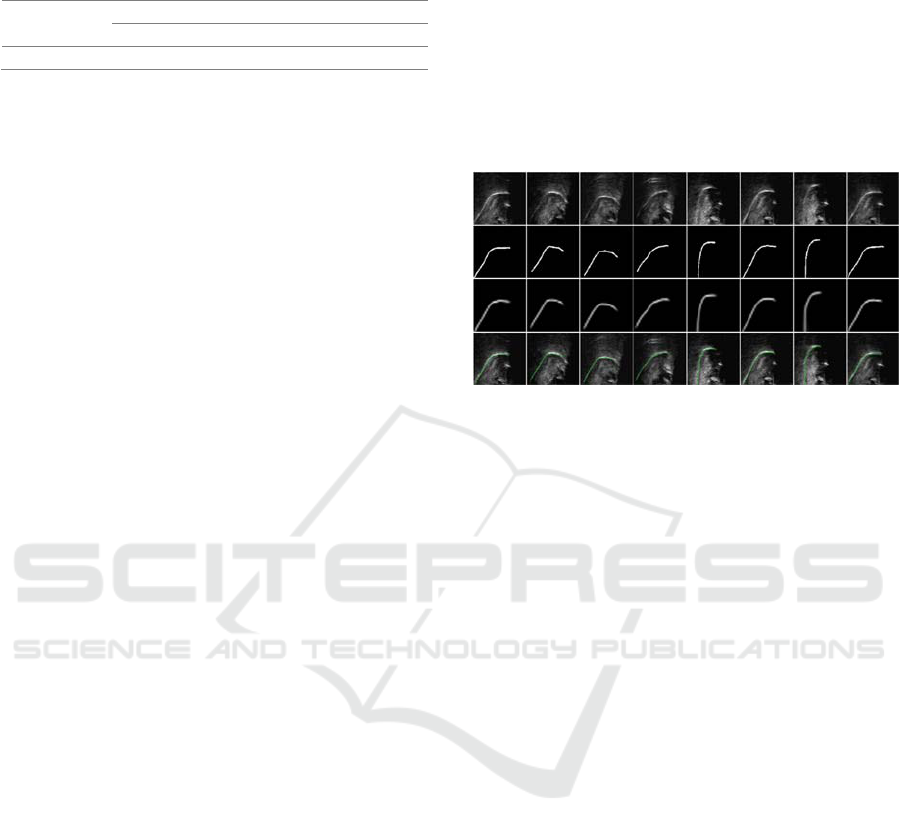
Table 2: A set of English words and pairs with difficulty
to pronounce for the Chinese language learner.
Pairs
Korea Stuff Tone Girl Pool
Career Staff Tune Grow Pull
Single word Little Studio Sugar
4 EXPERIMENTAL RESULTS
Due to the lack of similar language training system
in the literature, we qualitatively compared our
system with similar ideas (Hueber, 2013; Ouni,
2014; Abel et al., 2015). From our experimental
results, our language training system is highly user-
friendly due to the illustration of tongue contour
instead of just depicting raw ultrasound image
sequences. Real-time and automatic performance of
our system allows linguistics to focus on training
process instead of manual editing and interpretation
of ultrasound images.
Our tracking method can recognize tongue
dorsum in different positions and orientations due to
translation invariant characteristic of CNN's. In
order to register ultrasound video on face profile
video automatically, a face detection algorithm from
OpenCV library (Haar cascade) is employed which
can find the approximate place of the tongue on the
face. Thus, students could use the system with more
flexibility than previous studies without using any
fixtures for fixing their head and ultrasound probe
position. Our system does not require any
initialization steps, and due to the simplicity of our
deep network architecture, GPU facility is not
necessary.
We assessed the proposed deep learning model
on a database comprises of 2190 images captured by
our ultrasound machine (Tablet Ultrasonix with
L14-5 linear probe) and 6631 images from the
internet (Lawson et al., 2015). Each image has a size
of (128 ×128), each of which comes with the same
size corresponding annotated mask created by our
annotation software package. The output segmented
image has size (34×34). Output results are illustrated
in the last row of Figure 6 where we randomly
selected some frames for the sake of presentation.
The database was divided into a training set and
a validation set with an 80/20 percentage split ratio,
respectively. We deployed our method by using the
Keras library (Chollet and others, 2015) and
TensorFlow backend (Abadi et al., 2016). Adam, an
algorithm for first-order gradient-based optimization
of stochastic objective functions was used with its
default parameters (Kingma and Ba, 2014), in which
a learning rate of 0.001, β
1
of 0.9, and β
2
of 0.999, as
well as schedule decay of 0.05 after each epoch,
were adopted to achieve a better convergence.
Default parameter values from relevant publications
(Badrinarayanan et al., 2015; Long et al., 2015;
Ronneberger et al., 2015) have been used for other
parameters such as the number of encoding and
decoding layers, number of iterations, and batch
sizes.
Figure 6: Results of applying the proposed image
segmentation and extraction method on video data. First
row: Some randomly selected raw ultrasound frames
(128×128), Second row: Corresponding masks for each
frame in the first row (128×128), Third row: Predicted
masks (34×34), Fourth row: Extracted contours using
skeleton method on a resized version of third raw images
(128×128) and then moved to lower part of the contour
region to superimpose with the original frame.
We used binary cross-entropy as the loss
function. To evaluate the performance of the
proposed method, we also calculated the dice
coefficient. Prediction and the labeled data are
compared in terms of MSD as defined in (Jaumard-
Hakoun et al., 2016). Our experimental results are
compared with the results of deep belief network
(DBN) (Jaumard-Hakoun et al., 2016) which is the
only previous method known to use deep learning in
tongue image analysis. Table 3 shows the
comparison for the Dice-coefficient validation error
related to the number of epochs. In our system, the
error declines to around 0.2 when the number of
epochs is around 100 and then levels out. The DBN
error remains around 0.4 even though the number of
epochs increases. Results of our proposed model are
shown in Figure 6 such that, for the sake of
illustration, frames were selected randomly during
the training stage. Images in the third row are
predicted maps from our proposed model which are
like the true labels in the second row.
Our proposed method outperformed other
methods regarding MSD criteria as shown in Table
4. The MSD value in terms of pixels was 1.43 pixels
for our proposed method, with a conversion of 1 px
= 0.638 mm, giving an average MSD of 0.91 mm,
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
306
while the DBN model achieved 1.0 mm (1 px =
0.295 mm). For the active contour tracking method
mentioned in (Li et al., 2005), the average MSD is
1.05 mm. It is important to mention that the two
human experts participating in active contour
tracking experiment produced two different
annotation results having an average MSD of 0.73
mm (Li et al., 2005), which may thus be reasonably
considered the ultimate minimum MSD of training
based automated methods.
We ran our model on a Windows PC with a 7-
Core CPU at 3.4GHz and 16GB of memory. In the
testing stage, our approach provided the
segmentation results of 175 frames in 2.343 seconds,
which equals 74.7 fps. The testing performance goes
down to 29.8 fps when we add tongue contour
extraction. Previous publications have not discussed
speed, possibly due to the nature of semi-automatic
or manual work. Alternatively, they may have not
achieved a high speed.
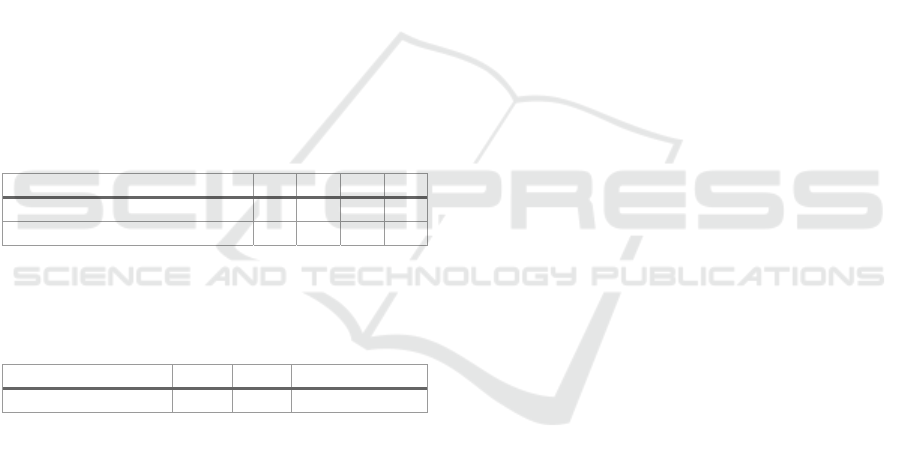
Table 3: Comparison of our method and previous work in
Dice-coefficient validation error. Our method out-
performs DBN when the number of epochs reaches 50 and
levels off at 100 epochs at around half the error of the
DBN system.
Number of epochs 5 50 100 250
Proposed method 0.446 0.243 0.212 0.212
DBN (Jaumard-Hakoun et al., 2016) 0.41 0.38 N/A 0.4
Table 4: The comparison of our model with others in term
of average MSD. Our proposed model shows better
accuracy than other state-of-the-art methods on tongue
dorsum extraction.
Methods Ours DBN Active Contour
Average MSD (mm) 0.91 1.0 1.05
5 CONCLUSION
While the potential benefits of articulatory feedback
using ultrasound data for language pronunciation
have long been acknowledged, until recently, with
the advancement of deep learning techniques, real-
time applications are feasible for easier guided
language training. The pilot experiment of language
learning system using ultrasound imaging outlined
in the present paper shows that it is so much
promising to add different facilities to ultrasound
video in order to enhance the learning process.
In automatic tongue tracking section of our
system, a trained deep convolutional neural network
architecture has been applied to extract and illustrate
tongue contours on real-time ultrasound videos.
Automatic registration of ultrasound and RGB
videos using Haar feature extraction algorithm,
added flexibility to the language training system by
omitting fixtures for the head and probe. The choice
of network structure was selected and modified in
the course of several experiments, decreasing the
number of network layers and removing unnecessary
steps for this application to speed up the process
while keeping the high accuracy.
Extraction of tongue contours from delineated
frames was successfully exploited using the skeleton
technique. The proposed system does not need
initialization or re-initialization (unlike EdgeTrak)
for each frame and it is an end-to-end approach. The
experimental results displayed the accuracy and
speed of the proposed method for real-time
automatic tongue tracking and we can assert that
convolutional neural networks are superior to their
counterparts such as deep belief networks. This kind
of system shows its potential abilities for solving
other ultrasound problems and being applied to other
organs.
REFERENCES
Abadi, M. et al. (2016) ‘TensorFlow: A System for Large-
Scale Machine Learning.’, in OSDI, pp. 265–283.
Abel, J. et al. (2015) ‘Ultrasound-enhanced multimodal
approaches to pronunciation teaching and learning.’,
Canadian Acoustics, 43(3).
Badrinarayanan, V., Kendall, A. and Cipolla, R. (2015)
‘SegNet: A Deep Convolutional Encoder-Decoder
Architecture for Image Segmentation’, pp. 1–14. doi:
10.1109/TPAMI.2016.2644615.
Bernhardt, B. et al. (2005) ‘Ultrasound in speech therapy
with adolescents and adults’, Clinical Linguistics and
Phonetics, 19(6–7), pp. 605–617. doi:
10.1080/02699200500114028.
Bernhardt, M. B. et al. (2008) ‘Ultrasound as visual
feedback in speech habilitation: Exploring consultative
use in rural British Columbia, Canada’, Clinical
Linguistics & Phonetics. Taylor & Francis, 22(2), pp.
149–162. doi: 10.1080/02699200701801225.
Berry, J. and Fasel, I. (2011) ‘Dynamics of tongue
gestures extracted automatically from ultrasound’, in
Acoustics, Speech and Signal Processing (ICASSP),
2011 IEEE International Conference on, pp. 557–560.
Berry, J. J. (2012) Machine learning methods for
articulatory data. The University of Arizona.
Chen, S. et al. (2018) ‘Direct, Near Real Time Animation
of a 3D Tongue Model Using Non-Invasive
Ultrasound Images’, in 2018 IEEE International
Conference on Acoustics, Speech and Signal
Processing (ICASSP). IEEE, pp. 4994–4998. doi:
10.1109/ICASSP.2018.8462096.
Real-time Automatic Tongue Contour Tracking in Ultrasound Video for Guided Pronunciation Training
307

Chollet, F. and others (2015) ‘Keras: Deep learning library
for theano and tensorflow’, URL: https://keras. io/k, 7,
p. 8.
Csapo, T. G. and Lulich, S. M. (2015) ‘Error analysis of
extracted tongue contours from 2D ultrasound
images’, Proceedings of the Annual Conference of the
International Speech Communication Association,
INTERSPEECH, 2015–Janua, pp. 2157–2161. doi:
10.1111/j.0956-7976.2004.00672.x.
Denby, B. et al. (2010) ‘Silent speech interfaces’, Speech
Communication. Elsevier, 52(4), pp. 270–287.
Fabre, D. et al. (2015) ‘Tongue tracking in ultrasound
images using eigentongue decomposition and artificial
neural networks’, Proceedings of the Annual
Conference of the International Speech
Communication Association, INTERSPEECH, 2015–
Janua(2), pp. 2410–2414.
Fasel, I. and Berry, J. (2010) ‘Deep belief networks for
real-time extraction of tongue contours from
ultrasound during speech’, in Pattern Recognition
(ICPR), 2010 20th International Conference on, pp.
1493–1496. doi: 10.1109/ICPR.2010.369.
Geddes, D. T. and Sakalidis, V. S. (2016) ‘Ultrasound
imaging of breastfeeding—a window to the inside:
Methodology, normal appearances, and application’,
Journal of Human Lactation. SAGE Publications Sage
CA: Los Angeles, CA, 32(2), pp. 340–349.
Ghrenassia, S., Ménard, L. and Laporte, C. (2014)
‘Interactive segmentation of tongue contours in
ultrasound video sequences using quality maps’, in
Medical Imaging 2014: Image Processing, p. 903440.
Gick, B., Bernhardt, B., et al. (2008) ‘Ultrasound imaging
applications in second language acquisition’,
Phonology and second language acquisition. John
Benjamins Amsterdam, 36, pp. 315–328.
Gick, B., Bernhardt, B. M., et al. (2008) ‘Ultrasound
imging applications in second language acquisition’,
Phonology and Second Language Acquisition, (June),
pp. 309–322. doi: 10.1684/abc.2012.0768.
Hoopingarner, D. (2005) ‘SECOND LANGUAGE
SPEECH PERCEPTION AND PRODUCTION:
ACQUISITION OF PHONOLOGICAL
CONTRASTS IN JAPANESE’, Studies in Second
Language Acquisition. Cambridge University Press,
27(3), p. 494.
Hueber, T. (2013) ‘Ultraspeech-player: intuitive
visualization of ultrasound articulatory data for speech
therapy and pronunciation training.’, in
INTERSPEECH, pp. 752–753.
Jaumard-Hakoun, A., Xu, K., Leboullenger, C., et al.
(2016) ‘An articulatory-based singing voice synthesis
using tongue and lips imaging’, in ISCA Interspeech
2016, pp. 1467–1471.
Jaumard-Hakoun, A., Xu, K., Roussel-Ragot, P., et al.
(2016) ‘Tongue contour extraction from ultrasound
images based on deep neural network’, Proceedings of
the 18th International Congress of Phonetic Sciences
(ICPhS 2015). Available at:
http://arxiv.org/abs/1605.05912.
Ji, Y. et al. (2017) ‘Updating the silent speech challenge
benchmark with deep learning’, arXiv preprint
arXiv:1709.06818.
Kingma, D. P. and Ba, J. (2014) ‘Adam: A method for
stochastic optimization’, arXiv preprint
arXiv:1412.6980.
Laporte, C. and Ménard, L. (2015) ‘Robust tongue
tracking in ultrasound images: a multi-hypothesis
approach’, in Sixteenth Annual Conference of the
International Speech Communication Association.
Laporte, C. and Ménard, L. (2018) ‘Multi-hypothesis
tracking of the tongue surface in ultrasound video
recordings of normal and impaired speech’, Medical
image analysis. Elsevier, 44, pp. 98–114. doi:
10.1016/j.media.2017.12.003.
Lawson, E. et al. (2015) ‘Seeing Speech: an articulatory
web resource for the study of phonetics [website]’.
University of Glasgow.
Lee, S. A. S., Wrench, A. and Sancibrian, S. (2015) ‘How
To Get Started With Ultrasound Technology for
Treatment of Speech Sound Disorders’, SIG 5
Perspectives on Speech Science and Orofacial
Disorders. ASHA, 25(2), pp. 66–80.
Li, M., Kambhamettu, C. and Stone, M. (2005)
‘Automatic contour tracking in ultrasound images’,
Clinical Linguistics and Phonetics, 19(6–7), pp. 545–
554. doi: 10.1080/02699200500113616.
Litjens, G. et al. (2017) ‘A survey on deep learning in
medical image analysis’, Medical Image Analysis,
42(1995), pp. 60–88. doi:
10.1016/j.media.2017.07.005.
Long, J., Shelhamer, E. and Darrell, T. (2015) ‘Fully
convolutional networks for semantic segmentation’, in
Proceedings of the IEEE conference on computer
vision and pattern recognition, pp. 3431–3440.
Loosvelt, M., Villard, P.-F. and Berger, M.-O. (2014)
‘Using a biomechanical model for tongue tracking in
ultrasound images’, Biomedical Simulation, 8789, pp.
67–75. Available at:
http://link.springer.com/chapter/10.1007/978-3-319-
12057-7_8.
Ouni, S. (2014) ‘Tongue control and its implication in
pronunciation training’, Computer Assisted Language
Learning. Taylor & Francis, 27(5), pp. 439–453.
Preston, J. L. et al. (2014) ‘Ultrasound visual feedback
treatment and practice variability for residual speech
sound errors’, Journal of Speech, Language, and
Hearing Research. ASHA, 57(6), pp. 2102–2115.
Ronneberger, O., Fischer, P. and Brox, T. (2015) ‘U-net:
Convolutional networks for biomedical image
segmentation’, in International Conference on
Medical image computing and computer-assisted
intervention, pp. 234–241.
Stone, M. (2005) ‘A guide to analysing tongue motion
from ultrasound images’, Clinical Linguistics and
Phonetics, 19(6–7), pp. 455–501. doi:
10.1080/02699200500113558.
Tang, L., Bressmann, T. and Hamarneh, G. (2012)
‘Tongue contour tracking in dynamic ultrasound via
higher-order MRFs and efficient fusion moves’,
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
308

Medical Image Analysis. Elsevier B.V., 16(8), pp.
1503–1520. doi: 10.1016/j.media.2012.07.001.
Tang, L. and Hamarneh, G. (2010) ‘Graph-based tracking
of the tongue contour in ultrasound sequences with
adaptive temporal regularization’, 2010 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition - Workshops, CVPRW 2010,
pp. 154–161. doi: 10.1109/CVPRW.2010.5543597.
Wilson, I. et al. (2006) ‘Ultrasound technology and second
language acquisition research’, in Proceedings of the
8th Generative Approaches to Second Language
Acquisition Conference (GASLA 2006), pp. 148–152.
doi: doi.org/10.1002/hed.20772.
Xu, K. et al. (2016) ‘Robust contour tracking in ultrasound
tongue image sequences’, Clinical linguistics &
phonetics. Taylor & Francis, 30(3–5), pp. 313–327.
doi: 10.3109/02699206.2015.1110714.
Xu, K. et al. (2017) ‘Convolutional neural network-based
automatic classification of midsagittal tongue gestural
targets using B-mode ultrasound images’, The Journal
of the Acoustical Society of America. ASA, 141(6), pp.
EL531--EL537.
Zharkova, N. (2013) ‘Using ultrasound to quantify tongue
shape and movement characteristics’, The cleft palate-
craniofacial journal. SAGE Publications Sage CA:
Los Angeles, CA, 50(1), pp. 76–81.
Real-time Automatic Tongue Contour Tracking in Ultrasound Video for Guided Pronunciation Training
309
