
FDMO: Feature Assisted Direct Monocular Odometry
Georges Younes
1,2
, Daniel Asmar
1
and John Zelek
2
1
Mechanical Engineering Department, American Univsersity of Beirut, Beirut, Lebanon
2
Department of Systems Design, University of Waterloo, Waterloo, Canada
Keywords:
Feature-based, Direct, Odometry, Localization, Monocular.
Abstract:
Visual Odometry (VO) can be categorized as being either direct (e.g. DSO) or feature-based (e.g. ORB-
SLAM). When the system is calibrated photometrically, and images are captured at high rates, direct methods
have been shown to outperform feature-based ones in terms of accuracy and processing time; they are also
more robust to failure in feature-deprived environments. On the downside, direct methods rely on heuristic
motion models to seed an estimate of camera motion between frames; in the event that these models are
violated (e.g., erratic motion), direct methods easily fail. This paper proposes FDMO (Feature assisted Direct
Monocular Odometry), a system designed to complement the advantages of both direct and featured based
techniques to achieve sub-pixel accuracy, robustness in feature deprived environments, resilience to erratic
and large inter-frame motions, all while maintaining a low computational cost at frame-rate. Efficiencies are
also introduced to decrease the computational complexity of the feature-based mapping part. FDMO shows
an average of 10% reduction in alignment drift, and 12% reduction in rotation drift when compared to the
best of both ORB-SLAM and DSO, while achieving significant drift (alignment, rotation & scale) reductions
(51%, 61%, 7% respectively) going over the same sequences for a second loop. FDMO is further evaluated on
the EuroC dataset and was found to inherit the resilience of feature-based methods to erratic motions, while
maintaining the accuracy of direct methods.
1 INTRODUCTION
Visual Odometry (VO) is the process of localizing one
or several cameras in an unknown environment. Two
decades of extensive research have led to a multitude
of VO systems that can be categorized based on the
type of information they extract from an image, as di-
rect, feature-based, or a hybrid of both (Younes et al.,
2017). While the direct framework manipulates pho-
tometric measurements (pixel intensities), the feature-
based framework extracts and uses visual features as
an intermediate image representation. The choice of
feature-based or direct has important ramifications on
the performance of the entire VO system, with each
type exhibiting its own challenges, advantages, and
disadvantages.
One disadvantage of particular interest is the sen-
sitivity of direct methods to their motion model. This
limitation is depicted in Fig. 1 (A) and (B), where a
direct VO system is subjected to a motion that violates
its presumed motion model, and causes it to errone-
ously expand the map as shown in Fig. 1 (C) and (D).
Inspired by the invariance of feature-based methods
across relatively large motions (as shown in Fig. 1 (E)
and (F)), this paper proposes to address the shortco-
mings of direct methods, by detecting failure in their
frame to frame odometry component, and accordingly
invoking an efficient feature-based strategy to cope
with large inter-frame motions, hereafter referred to
as large baselines. We call our approach Feature assis-
ted Direct Monocular Odometry, or FDMO for short.
We show that by effectively exploiting information
available from both direct and feature-based frame-
works, FDMO considerably improves the robustness
of monocular VO by succesfully achieving simultane-
ously the following properties:
1. Sub-pixel accuracy for the odometry system.
2. Robustness in feature-deprived environments.
3. Low computational cost at frame-rate, and a re-
duced computational cost for feature-based map
optimization.
4. Resilience to erratic and large inter-frame moti-
ons.
Younes, G., Asmar, D. and Zelek, J.
FDMO: Feature Assisted Direct Monocular Odometry.
DOI: 10.5220/0007524807370747
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 737-747
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
737
C D
A B
E
F
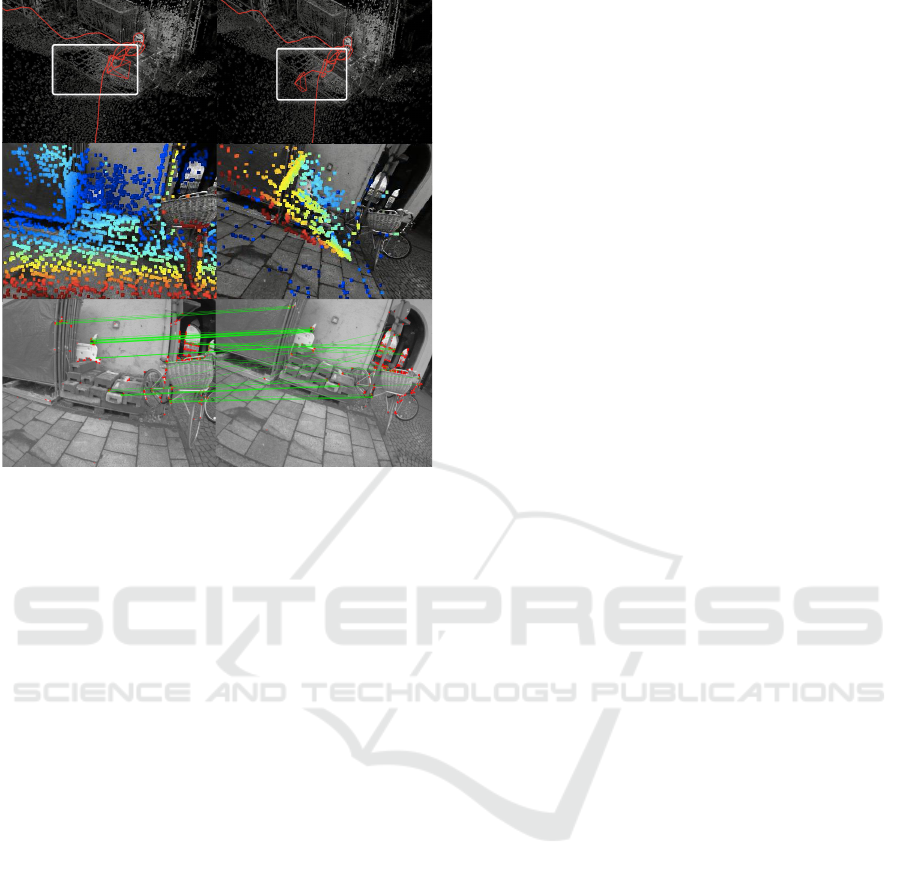
Figure 1: Direct methods failure under large baseline mo-
tion. (A) and (B) show the trajectory estimated from a direct
odometry system, before and after going through a relati-
vely large baseline between two consecutive frames (shown
in (C) and (D). Notice how the camera’s pose in (B) de-
railed from the actual path to a wrong pose. (C) and (D)
show the projected direct point cloud on both frames re-
spectively after erroneously estimating their poses. Notice
how the projected point cloud is no longer aligned with the
scene. On the other hand, (E) and (F) show how features
can be matched across the relatively large baseline, allo-
wing feature-based methods to cope with such motions.
2 BACKGROUND
Visual odometry can be broadly categorized as being
either direct or feature-based.
2.1 Direct VO
Direct methods process raw pixel intensities with the
brightness constancy assumption (Baker and Mat-
thews, 2004):
I
t
(x) = I
t−1
(x + g(x)), (1)
where x is the 2-dimensional pixel coordinates (u, v)
T
and g(x) denotes the displacement function of x be-
tween the two images I
t
and I
t−1
. Frame-to-frame
tracking is then a byproduct of an image alignment
optimization (Baker and Matthews, 2004) that mini-
mizes the photometric residual (intensity difference
between the two images) over the geometric transfor-
mation that relates them.
2.1.1 Traits of Direct Methods
Since direct methods rely on the entire image for
localization, they are less susceptible to failure in
feature-deprived environments, and do not require a
time-consuming feature extraction and matching step.
More importantly, since the alignment takes place at
the pixel intensity level, the photometric residuals can
be interpolated over the image domain ΩI, resulting
in an image alignment with sub-pixel accuracy, and
relatively less drift than feature-based odometry met-
hods (Irani and Anandan, 2000). However, the ob-
jective function to minimize is highly non-convex;
its convergence basin is very small, and will lock to
an erroneous configuration if the optimization is not
accurately initialized. Most direct methods cope with
this limitation by adopting a pyramidal implementa-
tion, by assuming small inter-frame motions, and by
relying on relatively high frame rate cameras; howe-
ver, even with a pyramidal implementation that slig-
htly increases the convergence basin, all parameters
involved in the optimization should be initialized such
that x and g(x) are within 1-2 pixel radii from each ot-
her.
2.1.2 State of the Art in Direct Methods
Direct Sparse Odometry (DSO) (Engel et al., 2017)
is currently considered the state of the art in direct
methods. It is a keyframe-based VO that exploits
the small inter-frame motions nature of a video feed
to perform a pyramidal implementation of the for-
ward additive image alignment (Baker and Matthews,
2004). DSO’s image alignment optimizes a variant of
the brightness constancy assumption over the incre-
mental geometric transformation between the current
frame and a reference keyframe. The aligned patches
are then used to update the depth estimates for each
point of interest as described in (Engel et al., 2013).
2.2 Feature-based VO
Feature-based methods process 2D images to ex-
tract locations that are salient in an image. Let x =
(u, v)
T
represent a feature’s pixel coordinates in the 2-
dimensional image domain ΩI. Associated with each
feature is an n-dimensional vector Q
n
(x), known as
a descriptor. The set ΦI{x, Q(x)} is an intermediate
image representation after which the image itself be-
comes obsolete and is discarded.
2.2.1 Traits of Feature-based Methods
On the positive side, features with their associated
descriptors are somewhat invariant to viewpoint and
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
738

illumination changes, such that a feature x ∈ ΦI
1
in
one image can be identified as x
0
∈ ΦI
2
in another,
across relatively large illumination and motion base-
lines. However, the robustness of the data association
relies on the distinctiveness of each feature from the
other, a condition that becomes more difficult to sa-
tisfy the higher the number of features extracted in
each scene; thereby favouring sparse, versus dense,
feature representations. On the downside, and as a
result of their discretized image representation space,
feature-based solutions offer inferior accuracy when
compared to direct methods, as the image domain
cannot be interpolated for sub-pixel accuracy.
2.2.2 State of the Art in Feature-based Methods
ORB-SLAM (Mur-Artal et al., 2015), currently con-
sidered the state of the art in feature-based methods,
associates FAST corners (Rosten and Drummond,
2006) with ORB descriptors (Rublee et al., 2011) as
an intermediate image representation. Regular fra-
mes are localized by minimizing the traditional ge-
ometric re-projection error; the 3D points are trian-
gulated using Epipolar geometry (Hartley and Zisser-
man, 2003), from multiple observations of the fea-
ture {x
i
, Q(x
i
)} in two or more keyframes. The con-
sistency of the map is maintained through a local
bundle adjustment minimization. Both, localization
and mapping optimizations are resilient to relatively
large inter-frame baseline motions and have a rela-
tively large convergence radius. To further increase
its performance and cut down processing time, ORB-
SLAM resorts to various methods for data association
such as the covisibility graph (Strasdat et al., 2011)
and bag of visual words. (Galvez-L
´
opez and Tardos,
2012).
3 RELATED WORK
When the corresponding pros and cons of both
feature-based and direct frameworks are placed side
by side, a pattern of complementary traits emerges
(Table 1). An ideal framework would exploit both di-
rect and feature-based advantages to benefit from the
direct formulation accuracy and robustness to feature-
deprived scenes, while making use of feature-based
methods for large baseline motions.
In an attempt to achieve the aformentioned proper-
ties, hybrid direct-feature-based systems were previ-
ously proposed in (Forster et al., 2014), (Krombach
et al., 2016) and (Ait-Jellal and Zell, 2017); however,
(Forster et al., 2014) did not extract feature descrip-
tors, it relied on the direct image alignment to perform
Table 1: Comparison between the feature-based and direct
methods. The more of the symbol +, the higher the attribute.
Trait Feature-based Direct
Large baseline +++ +
Robust to Feature
Deprivation
+ +++
Recovered scene
point density
+ +++
Accuracy + +++
Optimization Non-
Convexity
+ ++
data association between the features. While this led
to significant speed-ups in the processing required for
data association, it could not handle large baseline
motions; as a result, their work was limited to high
frame rate cameras, which ensured frame-to-frame
motion is small. On the other hand, both (Krombach
et al., 2016) and (Ait-Jellal and Zell, 2017) adopted a
feature-based approach as a front-end to their system,
and subsequently optimized the measurements with a
direct image alignment; as such, both systems suffer
from the limitations of the feature-based framework,
i.e. they are subject to failure in feature-deprived en-
vironments and therefore not able to simultaneously
meet all of the desired traits of Table 1. To address
this issue, both systems resorted to stereo cameras.
In contrast to these systems, FDMO can ope-
rate using a monocular camera, and simultaneously
achieve all of the desired traits. FDMO can also
be adapted for stereo and RGBD cameras as well.
FDMO’s source code will be made publicly available
on this URL upon the acceptance of this work.
4 PROPOSED SYSTEM
To capitalize on the advantages of both feature-based
and direct frameworks, our proposed approach con-
sists of a local direct visual odometry, assisted with a
feature-based map, such that it may resort to feature-
based odometry only when necessary. Therefore,
FDMO does not need to perform a computationally
expensive feature extraction and matching step at
every frame. During its feature-based map expan-
sion, FDMO exploits the localized keyframes with
sub-pixel accuracy from the direct framework, to ef-
ficiently establish feature matches in feature-deprived
environments using restricted epipolar search lines.
Similar to DSO, FDMO’s local temporary map is
defined by a set of seven direct-based keyframes and
2000 active direct points. Increasing these parame-
ters was found by (Engel et al., 2017) to significantly
increase the computational cost without much impro-
FDMO: Feature Assisted Direct Monocular Odometry
739
Direct Odometry
New
Frame
CVMM
Pyramidal
FAIA (Eq.2)
in M
d
T
F
If FAIA
diverged
T
F
If Track
M
d
Disable M
d
Feature-based
tracking
recovery
Update direct
depth map
Is KF
d
?
add new
KF
d
F
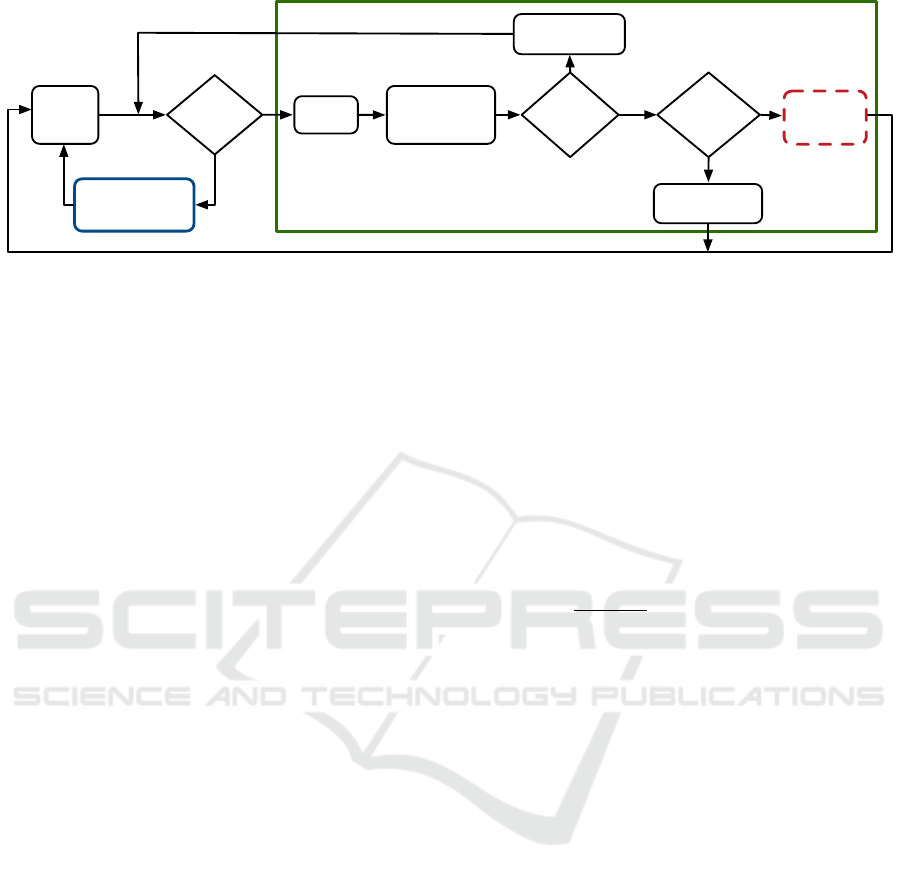
Figure 2: Front-end flowchart of FDMO. It runs on a frame by frame basis and uses a constant velocity motion model
(CVMM) to seed a Forward Additive Image Alignment (FAIA) to estimate the new frame’s pose and update the direct map
depth values. It also decides whether to invoke the feature-based tracking or add a new keyframe into the system. The blue
(solid line) and red (dashed line) boxes are further expanded in figures 3 and 4 respectively.
vement in accuracy. Direct keyframe insertion and
marginalization occurs frequently according to con-
ditions described in (Engel et al., 2017). In con-
trast, the feature-based map is made of an undetermi-
ned number of keyframes, each with an associated set
of features and their corresponding ORB descriptors
Φ(x, Q(x)).
4.1 Notation
To address any ambiguities, the superscript d will be
assigned to all direct-based measurements and f for
all feature-based measurements; not to be confused
with underscript f assigned to the word frame. There-
fore, M
d
refers to the temporary direct map, and M
f
to the feature-based map, which is made of an un-
restricted number of keyframes κ
f
and a set of 3D
points X
f
. I
f
i
refers to the image of frame i and T
f
i
,KF
d
is the se(3) transformation relating frame i to the la-
test active keyframe KF in the direct map. We also
make the distinction between z referring to depth me-
asurements associated with a 2D point x and Z refe-
ring to the Z coordinate of a 3D point.
4.2 Odometry
4.2.1 Direct Image Alignment
Frame by frame operations are handled by the flow-
chart described in Fig. 2. Similar to (Engel et al.,
2017), newly acquired frames are tracked by minimi-
zing
argmin
T
f
i
,KF
d
∑
x
d
∑
x∈N(x
d
)
Ob j(I
f
i
(ω(x, z,T
f
i
,KF
d
)−I
KF
d
(x, z))),
(2)
where f
i
is the current frame, KF
d
is the latest added
keyframe in M
d
, x
d
∈ ΩI
f
is the set of image locati-
ons with sufficient intensity gradient and an associa-
ted depth value d. N(x
d
) is the set of pixels neighbou-
ring x
d
and w(·) is the projection function that maps a
2D point from f
i
to KF
d
.
The minimization is seeded from a constant velo-
city motion model (CVMM). However, erratic mo-
tion or large motion baselines can easily violate the
CVMM, erroneously initializing the highly-non con-
vex optimization, and yielding unrecoverable tracking
failure. We detect tracking failure by monitoring the
RMSE of Eq. (2) before and after the optimization;
if the ratio
RMSE
a f ter
RMSE
be f ore
> 1 + ε we consider that the
optimization has diverged and we invoke the feature-
based tracking recovery, summarized in the flowchart
of Fig. 3. The ε is used to restrict feature-based inter-
vention when the original motion model used is accu-
rate, a value of ε = 0.1 was found as a good trade-
off between continuously invoking the feature-based
tracking and not detecting failure in the optimization.
To avoid extra computational cost, feature extraction
and matching is not performed on a frame by frame
basis, it is only invoked during feature-based tracking
recovery and feature-based KF insertion.
4.2.2 Feature-based Tracking Recovery
Our proposed feature-based tracking operates in M
f
.
When direct tracking diverges, we consider the
CVMM estimate to be invalid and seek to estimate a
new motion model using the feature-based map. Our
proposed feature-based tracking recovery is a vari-
ant of the global re-localization method proposed in
(Mur-Artal et al., 2015); we first start by detecting
Φ f
i
= Φ(x
f
, Q(x
f
)) in the current image, which are
then parsed into a vocabulary tree. Since we consider
the CVMM to be invalid, we fall back on the last piece
of information the system was sure of before failure:
the pose of the last successfully added keyframe. We
define a set κ
f
of feature-based keyframes KF
f
con-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
740

nected to the last added keyframe KF
d
through a co-
visibility graph (Strasdat et al., 2011), and their asso-
ciated 3D map points X
f
.
Blind feature matching is then performed between
Φ f
i
and all keyframes in κ
f
, by restricting feature ma-
tching to take place between features that exist in the
same node in a vocabulary tree (Galvez-L
´
opez and
Tardos, 2012); this is done to reduce the computatio-
nal cost of blindly matching all features.
Once data association is established between f
i
and the map points, we set up an EPnP (Efficient
Perspective-n-Point Camera Pose Estimation) (Lepe-
tit et al., 2009) to solve for an initial pose T
f
i
using
3D-2D correspondences in an non-iterative manner.
The new pose is then used to define a 5 × 5 search
window in f
i
surrounding the projected locations of
all 3D map points X
f
∈ κ
f
. Finally the pose T
f
i
is
refined through the traditional feature-based optimi-
zation. To achieve sub-pixel accuracy, the recovered
pose T
f
i
is then converted into a local increment over
the pose of the last active direct keyframe, and then
further refined in a direct image alignment optimiza-
tion Eq. (2).
Note that the EPnP step could have been skip-
ped in favour of using the last correctly tracked keyf-
rame’s position as a starting point; however, data as-
sociation would then require a relatively larger se-
arch window, which in turn increases its computati-
onal burden in the subsequent step. Data association
using a search window was also found to fail when
the baseline motion was relatively large.
4.3 Mapping
FDMO’s mapping process is composed of two com-
ponents: direct, and feature-based as described in Fig.
4. The direct map propagation used here is the same
as suggested in (Engel et al., 2017); however we ex-
pand its capabilities to propagate the feature-based
map. When a new keyframe is added to M
d
, we cre-
ate a new feature-based keyframe KF
f
that inherits
its pose from KF
d
. ΦKF
f
(x
f
, Q(x
f
)) is then extrac-
ted and data association takes place between the new
keyframe and a set of local keyframes κ
f
surrounding
it via epipolar search lines. The data association is
used to keep track of all map points X
f
visible in the
new keyframe and to triangulate new map points.
To ensure an accurate and reliable feature-based
map, typical feature-based methods employ local
bundle adjustment (LBA)(Mouragnon et al., 2006) to
optimize for both the keyframes poses and their asso-
ciated map points; however, employing an LBA may
generate inconsistencies between both map represen-
tations, and is computationally expensive; instead, we
make use of the fact that the new keyframe’s pose
is already locally optimal, to replace the typical lo-
cal bundle adjustment with a computationally less de-
manding structure only optimization defined for each
3D point X
f
j
:
argmin
X
f
j
∑
i∈κ
f
Ob j(x
f
i, j
− π(T
KF
f
i
X
f
j
)), (3)
where X
j
spans all 3D map points observed in all
keyframes ∈ κ
f
. We use ten iterations of Gauss-
Newton to minimize the normal equations associated
with Eq. (3) which yield the following update rule per
3D point X
j
per iteration:
X
t+1
j
= X
t
j
− (J
T
W J)
−1
J
T
We (4)
Where e is the stacked reprojection residuals e
i
asso-
ciated with a point X
j
and its found match x
i
in keyf-
rame i. J is the stacked Jacobians of the reprojection
error which is found by stacking:
J
i
=
"
f
x
Z
0 −
f
x
X
Z
2
0
f
y
Z
−
f
y
Y
Z
2
#
R
KF
i
(5)
and R
KF
i
is the 3 × 3 orientation matrix of the keyf-
rame observing the 3D point X
j
. Similar to ORB-
SLAM, W is a block diagonal weight matrix that
down-weighs the effect of residuals computed from
feature matches found at high pyramidal levels
1
and
is computed as
W
ii
=
S f
2n
0
0 S f
2n
(6)
where S f is the scale factor used to generate the py-
ramidal representation of the keyframe (we use S f =
1.2) and n is the pyramid level from which the feature
was extracted (0 < n < 8). The Huber norm is also
used to detect and remove outliers. We have limited
the number of iterations in the optimization of Eq. (3)
to ten, since no significant reduction in the feature-
based re-projection error was recorded beyond that.
4.4 Feature-based Map Maintenance
To ensure a reliable feature-based map, the following
practices are employed. For proper operation, di-
rect methods require frequent addition of keyframes,
resulting in small baselines between the keyframes,
which in turn can cause degeneracies if used to trian-
gulate feature-based points. To avoid numerical insta-
bilities, following the suggestion of (Klein and Mur-
ray, 2007), we prevent feature triangulation between
1
Features matched at higher pyramidal levels are less
reliable.
FDMO: Feature Assisted Direct Monocular Odometry
741
Extract
ɸ(x,Q(x))
Feature based tracking recovery
New
Frame
Blind feature
matching in
vocabulary tree
EPnP
Get κ
f
from
covisibility graph
Guided data
association with a
search window
Motion only
optimization
in M
f
Is KF
d
?
Add new KF
d
If not enough
matches
Update direct
depth map
T
F
T
F
Fail
Pyramidal
FAIA (Eq.2)
in M
d
If Track
M
d
F
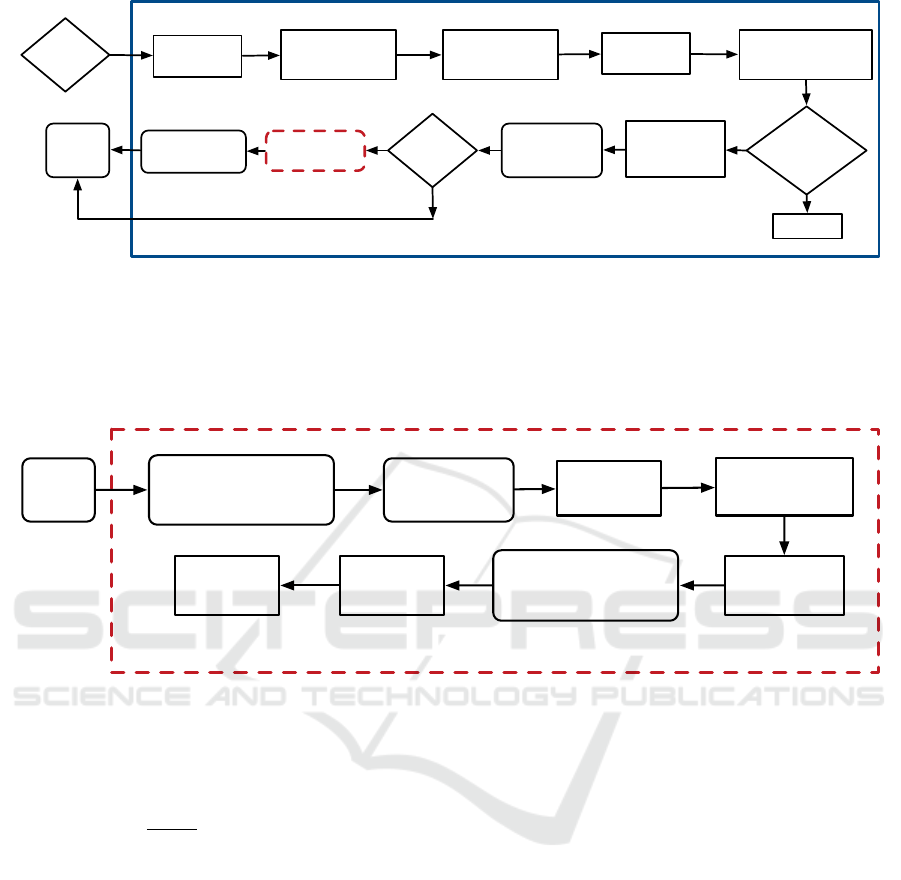
Figure 3: FDMO Tracking Recovery flowchart. Only invoked when direct image alignment fails, it takes over the front end
operations of the system until the direct map is re-initialized. FDMO’s tracking recovery is a variant of ORB-SLAM’s global
failure recovery that exploits the information available from the direct framework to constrain the recovery procedure locally.
We start by extracting features from the new frame and matching them to 3D features observed in a set of keyframes κ
f
connected to the last correctly added keyframe from KF
d
. Efficient Perspective-n-Point (EPnP) camera pose estimation is
used to estimate an initial guess which is then refined by a guided data association between the local map and the frame. The
refined pose is then used to seed a Forward additive image alignment step to achieve sub-pixel accuracy.
Add new KF
d
New
KF
d
Photometric
optimization in M
d
add T
f
KF
=T
d
KF
Extract
ɸ(x,Q(x))
Get κ
f
from
covisibility graph
Feature
triangulation
Structure only
optimization (Eq.3) in
M
f
M
d
map
maintenance
M
f
map
maintenance
Figure 4: Our proposed mapping flowchart, is a variant of DSO’s mapping backend; we augment its capabilities to expand
the feature-based map with new KF
f
. It operates after or parallel to the direct photometric optimization of DSO, by first
establishing feature matches using restricted epipolar search lines; the 3D feature-based map is then optimized using a com-
putationally efficient structure-only bundle adjustment, before map maintenance ensures the map remain outliers free.
keyframes with a
baseline
depth
ratio less than 0.02 which is
a trade-off between numerically unstable triangulated
features and feature deprivation problems. We exploit
the frequent addition of keyframes as a feature quality
check. In other words, a feature has to be correctly
found in at least 4 of the 7 keyframes subsequent to
the keyframe it was first observed in, otherwise it is
considered spurious and is subsequently removed. To
ensure no feature deprivation occurs, a feature can-
not be removed until at least 7 keyframes have been
added since it was first observed. Finally, similar to
(Mur-Artal et al., 2015) a keyframe with ninety per-
cent of its points shared with other keyframes is re-
moved from M
f
only once marginalized from M
d
.
The aforementioned practices ensure that suffi-
cient reliable map points and features are available
in the immediate surrounding of the current frame,
and that only necessary map points and keyframes are
kept once the camera moves on.
5 EXPERIMENTS AND RESULTS
To evaluate FDMO’s tracking robustness, experi-
ments were performed on several well-known data-
sets (Burri et al., 2016) and (Engel et al., 2016), and
both qualitative and quantitative appraisal was con-
ducted. To further validate FDMO’s effectiveness,
the experiments were also repeated on state of the
art open-source systems in both direct (DSO) and
feature-based (ORB-SLAM2). For fairness of com-
parison, we evaluate ORB-SLAM2 as an odometry
system (not as a SLAM system); therefore, similar to
(Engel et al., 2017) we disable its loop closure thread
but we keep its global failure recovery, local, and glo-
bal bundle adjustments intact. Note that we’ve also
attempted to include results from SVO (Forster et al.,
2014) but it continuously failed on most datasets, so
we excluded it.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
742

5.1 Datasets
5.1.1 TUM MONO Dataset
(Engel et al., 2016) Contains 50 sequences of a ca-
mera moving along a path that begins and ends at
the same location. The dataset is photometrically ca-
librated: camera response function, exposure times
and vignetting are all available; however, ground truth
pose information is only available for two small seg-
ments at the beginning and end of each sequence;
fortunately, such information is enough to compute
translation, rotation, and scale drifts accumulated
over the path, as described in (Engel et al., 2016).
5.1.2 EuRoC MAV Dataset
(Burri et al., 2016) Contains 11 sequences of stereo
images recorded by a drone mounted camera. Ground
truth pose for each frame is available from a Vicon
motion capture system.
5.2 Computational Cost
The experiments were conducted on an Intel Core
i7-4710HQ 2.5GHZ CPU, 16 GB memory; no GPU
acceleration was used. The time required by each of
the processes was recorded and summarized in Table
2. Both DSO and ORB-SLAM2 consist of two pa-
rallel components, a tracking process (at frame-rate
2
)
and a mapping process (keyframe-rate
3
). On the ot-
her hand, FDMO has three main processes: a direct
tracking process (frame-rate), a direct mapping pro-
cess (keyframe-rate), and a feature-based mapping
process (keyframe-rate). Both of FDMO’s mapping
processes can run either sequentially for a total com-
putational cost of 200 ms on a single thread, or in pa-
rallel on two threads. As Table 2 shows, the mean
tracking time for FDMO remains almost the same
that of DSO: we don’t extract features at frame-rate;
feature-based tracking in FDMO is only performed
when the direct tracking diverges; the extra time is
reflected in the slightly increased standard deviation
of the computational time with respect to DSO. Ne-
vertheless, it is considerably less than ORB-SLAM2’s
23 ms. The highest computational cost during FDMO
tracking occurs when the recovery method is invoked,
with a highest recorded processing time during our
experiments of 35 ms. As for FDMO’s mapping pro-
cesses, its direct part remains the same as DSO, whe-
reas the feature-based part takes 153 ms which is also
2
occur at every frame.
3
occur at new keyframes only.
Table 2: Computational time (ms) for processes in DSO,
FDMO and ORB-SLAM2. (Empty means the process does
not exist).
Process DSO FDMO
ORB-
SLAM2
Tracking
(frame-rate)
12.35±
9.62
13.54±
14.19
23.04±
4.11
Direct
mapping
(Keyframe-
rate)
46.94±
51.62
46.89±
65.21
—
Feature-based
mapping
(Keyframe-
rate)
—
153.8±
58.08
236.47±
101.8
significantly less than ORB-SLAM2’s feature-based
mapping process that requires 236 ms.
5.3 Quantitative Results
We assess FDMO, ORB-SLAM2 and DSO using the
following experiments.
5.3.1 Two Loop Experiment
In this experiment, we investigate the quality of
the estimated trajectory by comparing ORB-SLAM2,
DSO, and FDMO. We allow all three systems to
run on various sequences of the Tum Mono dataset
(Engel et al., 2016) across various conditions, both
indoors and outdoors. Each system is allowed to
run through every sequence for two continuous loops
where each sequence begins and ends at the same lo-
cation. We record the positional, rotational, and scale
drifts at the end of each loop, as described in (Engel
et al., 2016). The drifts recorded at the end of the first
loop are indicative of the system’s performance across
the unmodified generic datasets, whereas the drifts re-
corded at the end of the second loop consist of three
components: (1) the drift accumulated from the first
loop, (2) an added drift accumulated over the second
run, and (3) an error caused by a large baseline mo-
tion induced at the transition between the loops. The
reported results are shown in Table 3 and some of the
recovered trajectories are shown in Fig. 5.
5.3.2 Frame Drop Experiment
While the first experiment reports on the system’s per-
formance across large scale scenes in various con-
ditions, this experiment investigates the effects erra-
tic and large baseline motions have on the camera’s
tracking accuracy. Erratic motion can be defined
as a sudden acceleration in the opposite direction of
FDMO: Feature Assisted Direct Monocular Odometry
743
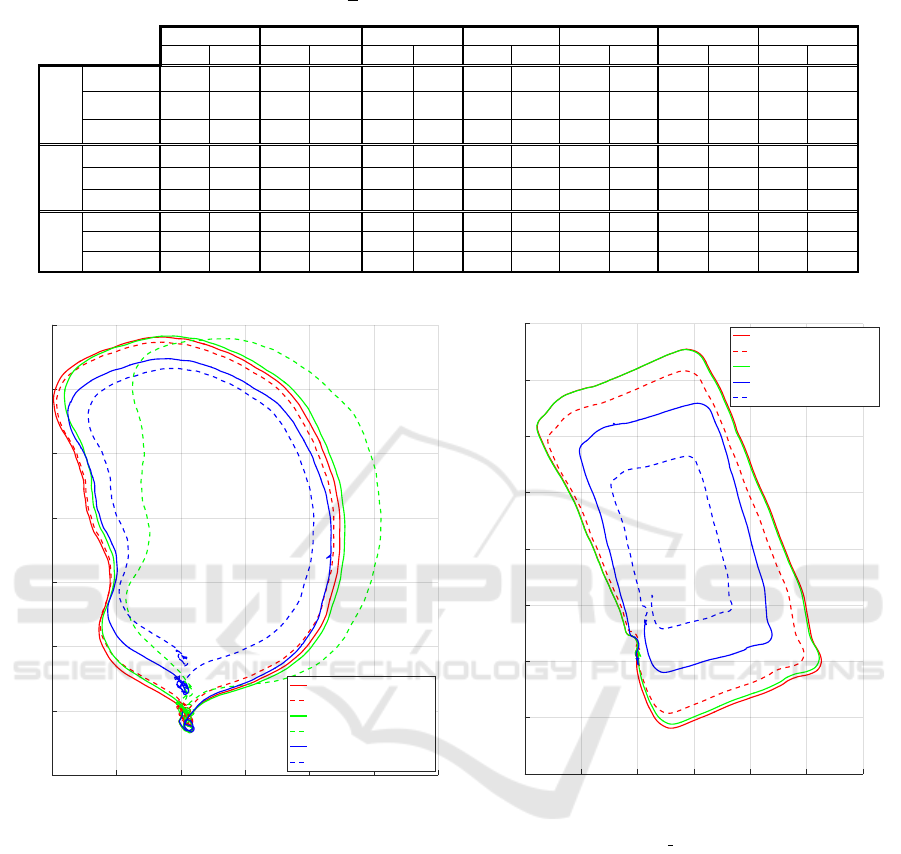
Table 3: Measured drifts after finishing one and two loops over various sequences from the TumMono dataset. The alignment
drift (meters), rotation drift (degrees) and scale(
m
m
) drifts are computed similar to (Engel et al., 2016).
Loop 1
Loop 2 Loop 1 Loop 2 Loop 1 Loop 2
Loop 1
Loop 2
Loop 1
Loop 2
Loop 1 Loop 2
Loop 1
Loop 2
FDMO
0.752 1.434 0.863 1.762 0.489 1.045 0.932 2.854 2.216 4.018 1.344 2.973 1.504 2.936
DSO
0.847
-
0.89 3.269 0.728 5.344 0.945
-
2.266 4.251 1.402 8.702 1.813
-
ORB SLAM
4.096 8.025 3.722 8.042 2.688 4.86 1.431 2.846
- -
8.026 12.69 6.72 13.56
FDMO
1.4 1.192 1.154 2.074 0.306 0.317 1.425 6.246 3.877 6.524 0.522 5.595 0.448 1.062
DSO
1.607
-
1.278 7.699 0.283 18.9 2.22
-
4.953 19.89 0.462 23.17 0.594
-
ORB SLAM
26.92 53.28 2.373 4.647 2.982 4.549 3.676 6.498
- -
3.707 7.375 3.243 6.668
FDMO 1.079 1.161 1.113 1.238 1.033 1.071 1.072 1.211 1.109 1.219 1.082 1.106 1.107 1.224
DSO 1.089
-
1.116 1.424 1.045 1.109 1.067
-
1.118 1.226 1.084 1.023 1.133
-
ORB SLAM 1.009 1.019 1.564 2.403 1.199 1.373 1.094 1.206 - - 1.867 2.574 1.7 2.675
Sequence 45
Sequence 50
Alignment
Rotation
Scale
Sequence 20
Sequence 25
Sequence 30
Sequence 35
Sequence 40
-10 -5 0 5 10 15 20
X (m)
-5
0
5
10
15
20
25
30
Y (m)
Sequence 30
FDMO Loop 1
FDMO Loop 2
DSO Loop 1
DSO Loop 2
ORB SLAM Loop 1
ORB SLAM Loop 2
-10 -5 0 5 10 15 20
X (m)
-10
-5
0
5
10
15
20
25
30
Y (m)
Sequence 50
FDMO Loop 1
FDMO Loop 2
DSO Loop 1
ORB SLAM Loop 1
ORB SLAM Loop 2
Figure 5: Sample paths estimated by the various systems on Sequences 30 and 50 of the Tum Mono dataset. The paths are all
aligned using ground truths available at the beginning and end of each loop. Each solid line corresponds to the first loop of
a system while the dashed line correspond to the second loop. Ideally, all systems would start and end at the same location,
while reporting the same trajectories across the two loops. Note that in Sequence 50, there is no second loop for DSO as it
was not capable of dealing with the large baseline between the loops and failed.
motion, and is quite common in hand-held devices
or quad-copters. Another example of erratic motion
occurs when the camera’s video feed is being trans-
mitted over a network to a ground station where com-
putation is taking place; communication issues may
cause frame drops which are seen by the odometry
system as large baseline motions; therefore it is impe-
rative for an odometry system to cope with such mo-
tions. To quantize the influence of erratic motions on
an odometry system, we set up an experiment to emu-
late their effects, by dropping frames and measuring
the recovered poses before and after dropping them.
The experiment is repeated at the same location and
the number of frames dropped is increased by five fra-
mes each time until each system fails. Various factors
can affect the obtained results, such as the distance to
the observed scene, skipping frames towards a previ-
ously observed or unobserved scene, and/or the type
of camera motion (i.e., sideways, forward moving, or
rotational motion), to name a few. Therefore we re-
peat the above experiment for each system in various
locations covering the above scenarios. We chose to
perform the experiments on the EuroC dataset (Burri
et al., 2016) whose frame to frame ground truth is
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
744
known; thus allowing us to compute the relative Eu-
clidean distance Translation = ||F
i
− F
j
||, and the
orientation difference between the recovered poses at
F
i
and F
j
as the geodesic metric of the normalized
quaternions on the unit sphere defined by Rotation =
cos
−1
(2|F
i
· F
j
|
2
− 1). We report on the percent error
%Error = 100 ×
|Measured−GroundTruth|
GroundTruth
for the recove-
red Euclidean distance and relative orientation before
and after the skipped frames. The obtained results for
FDMO, DSO and ORB-SLAM2 are shown in Fig. 6.
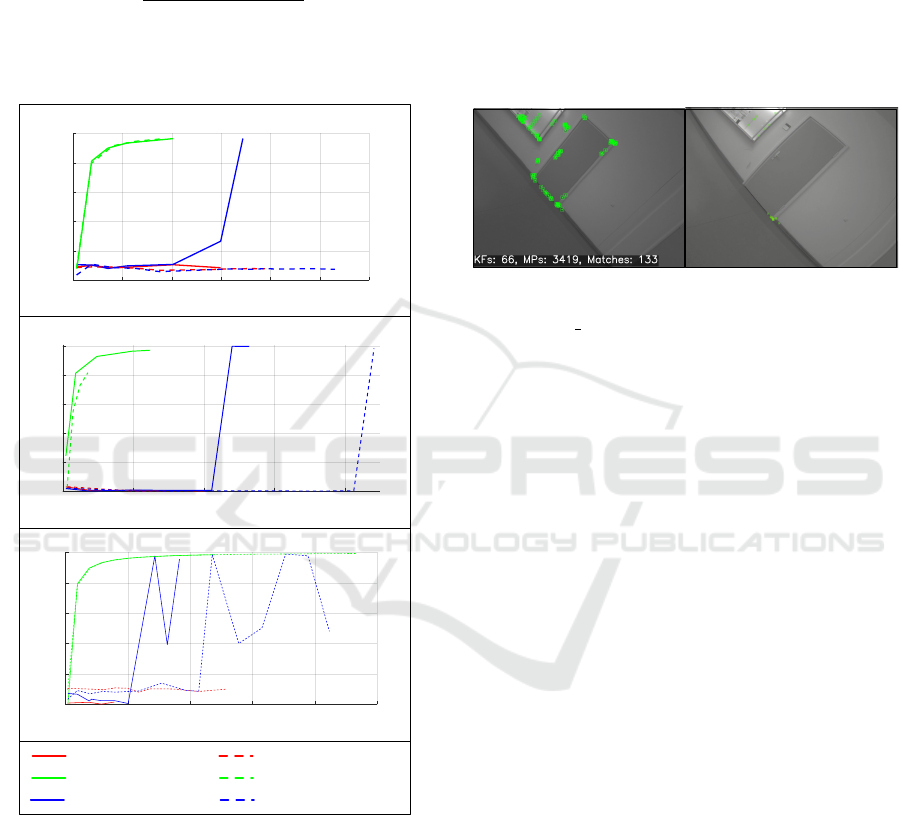
0 0.5 1 1.5 2 2.5 3
Ground Truth Translation (meters)
0
20
40
60
80
100
% Error
Camera motion parallel to its optical axis
0 10 20 30 40
Ground Truth rotation (degrees)
0
20
40
60
80
100
% Error
Pure rotation motion
FDMO (forward) FDMO (Backward)
DSO (forward) DSO (Backward)
ORB SLAM (forward) ORB SLAM (Backward)
A
B
0 1 2 3 4 5
Ground Truth Translation (meters)
0
20
40
60
80
% Error
Camera motion perpendicular to its optical axis
100
C
Figure 6: %Error v.s. ground truth motion measured by
dropping frames and estimating the relative rotation and
translation before and after the frames were dropped. Af-
ter every measurement, the system is restarted and the num-
ber of dropped frames is increased/decreased by 5 frames
for forward and backward jumps respectively, until failure
occurs. The experiments were conducted on various se-
quences of the EuroC dataset (Burri et al., 2016): Expe-
riment (A) in the sequence MH01 with forward starting at
frame 200 and backward starting at 250; Experiment (B) in
the sequence MH02 with forward starting at frame 510 and
backward at 560. Experiment (C) in the sequence MH03
with forward starting at frame 950 and backward starting at
frame 1135.
5.4 Qualitative Assessment
Fig. 7 compares the resilience of FDMO and ORB-
SLAM2 to feature-deprived environments. FDMO
exploits the sub-pixel accurate localized direct keyfra-
mes to propagate its feature-based map, therefore its
capable of generating accurate and robust 3D land-
marks that have a higher matching rate even in low
textured environments. In contrast, ORB-SLAM2
fails to propagate its map causing tracking failure.
FDMO ORB SLAM
Figure 7: Features matched of FDMO (left) and ORB-
SLAM2 (right) in a feature deprived environment (sequence
40 of the Tum mono dataset).
5.5 Discussion
The results reported in the first experiment (Table. 3)
demonstrate FDMO’s performance in large-scale ind-
oor and outdoor environments. The importance of
the problem FDMO attempts to address is highligh-
ted by analyzing the drifts incurred at the end of the
first loop; while no artificial erratic motions nor large
baselines were introduced over the first loop, i.e. un-
modified dataset, FDMO was able to outperform the
best of either DSO and ORB-SLAM2 in terms of po-
sitional and rotational drifts, by an average of 10%
and 12% respectively on most sequences. The impro-
ved performance is due to FDMO’s ability to detect
and account for inaccuracies in the direct framework
using its feature-based map, while benefiting from the
sub-pixel accuracy of the direct framework. Further-
more, FDMO was capable of expanding both its direct
and feature-based maps in feature-deprived environ-
ments (e.g. Sequence 40) whereas ORB-SLAM2 fai-
led to do so. FDMO’s robustness is further proven by
analyzing the results obtained over the second loop.
The drifts accumulated toward the end of the second
loop are made of three components; mainly, the drift
that occurred over the first loop, the drift that occurred
over the second, and an error caused by a large base-
line separating the frames at the transition between
the loops. If the error caused by the large baseline
is negligible, we would expect the drift at the second
loop to be double that of the first. While the measured
drifts for both ORB-SLAM2 and FDMO does indeed
exhibit such behaviour, the drifts reported by ORB-
FDMO: Feature Assisted Direct Monocular Odometry
745

SLAM2 are significantly larger than the ones repor-
ted by FDMO as Fig. 5 also highlights. On the other
hand, DSO tracking failed entirely on various occa-
sions, and when it did not fail, it reported a signifi-
cantly large increase in drifts over the second loop. As
DSO went through the transition frames between the
loops, its motion model estimate was violated, errone-
ously initializing its highly non-convex tracking op-
timization. The optimization got subsequently stuck
in a local minimum, which led to a wrong pose esti-
mate. The wrong pose estimate was in turn used to
propagate the map, thereby causing large drifts. On
the other hand, FDMO was successfully capable of
handling such a scenario, reporting an average impro-
vement of 51%, 61% and 7 % in positional, rotatio-
nal, and scale drifts respectively, when compared to
the best of both DSO and ORB-SLAM2, on most se-
quences.
The results reported in the second experiment
(Fig. 6) quantify the robustness limits of each sy-
stem to erratic motions. Various factors may affect the
obtained results, therefore, we attempted the experi-
ments under various types of motion and by skipping
frames towards a previously observed (herein referred
to as backward) and previously unobserved part of the
scene (referred to as forward). The observed depth of
the scene is also an important factor: far-away sce-
nes remain for a longer time in the field of view, thus
improving the systems’ performance. However, we
cannot model all different possibilities of depth vari-
ations; therefore, for the sake of comparison, all sy-
stems were subjected to the same frame drops at the
same locations in each experiment where the obser-
ved scene’s depth varied from three to eight meters.
The reported results highlight DSO’s brittleness to
any violation of its motion model; where translations
as little as thirty centimeters and rotations as small
as three degrees introduced errors of over 50% in its
pose estimates. On the other hand, FDMO was ca-
pable of accurately handling baselines as large as 1.5
meters and 20 degrees towards previously unobser-
ved scene, after which failure occurred due to feature-
deprivation, and two meters toward previously obser-
ved parts of the scene. ORB-SLAM2’s performance
was very similar to FDMO in forward jumps, howe-
ver it significantly outperformed it by twice as much
in the backward jumps; ORB-SLAM2 uses a global
map for failure recovery whereas FDMO, being an
odometry system, can only make use of its immediate
surroundings. Nevertheless FDMO’s current limitati-
ons in this regard are purely due to our current imple-
mentation as there are no theoretical limitations of de-
veloping FDMO into a full SLAM system. However,
using a global relocalization method has its downside;
the jitter in ORB-SLAM2’s behaviour (shown in Fig.
6 (C)) is due to its relocalization process erroneously
localizing the frame at spurious locations. Another
key aspect of FDMO, visible in this experiment, is
its ability to detect failure and not incorporate it into
its map. In contrast, toward their failure limits, both
DSO and ORB-SLAM2 incorporate spurious measu-
rements for few frames before failing completely.
6 CONCLUSION
This paper successfully demonstrated the advantages
of integrating direct and feature-based methods in
VO. By relying on a feature-based map when direct
tracking fails, the issue of large baselines that is cha-
racteristic of direct methods is mitigated, while main-
taining the high accuracy and robustness to feature-
deprived environments of direct methods in both
feature-based and direct maps, at a relatively low
computational cost. Both qualitative and quantitative
experimental results proved the effectiveness of the
collaboration between direct and feature-based met-
hods in the localization part.
While these results are exciting, they do not make
use of a global feature-based map; as such we are
currently developing a more elaborate integration be-
tween both frameworks, to further improve the map-
ping accuracy and efficiency. Furthermore, we antici-
pate that the benefits to the mapping thread will also
lead to added robustness and accuracy to the motion
estimation within a full SLAM framework.
ACKNOWLEDGEMENTS
This work was funded by the University Research
Board (UBR) at the American University of Beirut,
and the Canadian National Science Research Council
(NSERC).
REFERENCES
Ait-Jellal, R. and Zell, A. (2017). Outdoor obstacle avoi-
dance based on hybrid stereo visual slam for an auto-
nomous quadrotor mav. In IEEE 8th European Con-
ference on Mobile Robots (ECMR).
Baker, S. and Matthews, I. (2004). Lucas-Kanade 20 Years
On: A Unifying Framework. International Journal of
Computer Vision, 56(3):221–255.
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J.,
Omari, S., Achtelik, M. W., and Siegwart, R. (2016).
The euroc micro aerial vehicle datasets. The Interna-
tional Journal of Robotics Research.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
746

Engel, J., Koltun, V., and Cremers, D. (2017). Direct sparse
odometry. IEEE Transactions on Pattern Analysis and
Machine Intelligence, PP(99):1–1.
Engel, J., Sturm, J., and Cremers, D. (2013). Semi-dense
Visual Odometry for a Monocular Camera. In Com-
puter Vision (ICCV), IEEE International Conference
on, pages 1449–1456. IEEE.
Engel, J., Usenko, V., and Cremers, D. (2016). A photo-
metrically calibrated benchmark for monocular visual
odometry. In arXiv:1607.02555.
Forster, C., Pizzoli, M., and Scaramuzza, D. (2014). Svo :
Fast semi-direct monocular visual odometry. In Robo-
tics and Automation (ICRA), IEEE International Con-
ference on.
Galvez-L
´
opez, D. and Tardos, J. D. (2012). Bags of Binary
Words for Fast Place Recognition in Image Sequen-
ces. Robotics, IEEE Transactions on, 28(5):1188–
1197.
Hartley, R. and Zisserman, A. (2003). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press.
Irani, M. and Anandan, P. (2000). About direct methods. In
Proceedings of the International Workshop on Vision
Algorithms: Theory and Practice, ICCV ’99, pages
267–277, London, UK, UK. Springer-Verlag.
Klein, G. and Murray, D. (2007). Parallel Tracking and
Mapping for Small AR Workspaces. 6th IEEE and
ACM International Symposium on Mixed and Aug-
mented Reality, pages 1–10.
Krombach, N., Droeschel, D., and Behnke, S. (2016). Com-
bining feature-based and direct methods for semi-
dense real-time stereo visual odometry. In Internati-
onal Conference on Intelligent Autonomous Systems,
pages 855–868. Springer.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). EPnP:
An Accurate O(n) Solution to the PnP Problem. Inter-
national Journal of Computer Vision, 81(2):155–166.
Mouragnon, E., Lhuillier, M., Dhome, M., Dekeyser, F.,
and Sayd, P. (2006). Real time localization and 3d
reconstruction. In 2006 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition
(CVPR’06), volume 1, pages 363–370.
Mur-Artal, R., Montiel, J. M. M., and Tardos, J. D. (2015).
ORB-SLAM: A Versatile and Accurate Monocular
SLAM System. IEEE Transactions on Robotics,
PP(99):1–17.
Rosten, E. and Drummond, T. (2006). Machine Learning
for High-speed Corner Detection. In 9th European
Conference on Computer Vision - Volume Part I, Pro-
ceedings of the, ECCV’06, pages 430–443, Berlin,
Heidelberg. Springer-Verlag.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB: An efficient alternative to SIFT or
SURF. In International Conference on Computer Vi-
sion (ICCV), pages 2564–2571.
Strasdat, H., Davison, A. J., Montiel, J. M. M., and Ko-
nolige, K. (2011). Double Window Optimisation for
Constant Time Visual SLAM. In International Confe-
rence on Computer Vision, Proceedings of the, ICCV
’11, pages 2352–2359, Washington, DC, USA. IEEE
Computer Society.
Younes, G., Asmar, D., Shammas, E., and Zelek, J. (2017).
Keyframe-based monocular slam: design, survey, and
future directions. Robotics and Autonomous Systems,
98:67 – 88.
FDMO: Feature Assisted Direct Monocular Odometry
747
