Data Acquisition from the Integration of Kinect Quaternions and
Myo Armband EMG Sensors to Aid Equinus Foot Treatment
Francisco M. A. Araújo
1a
, N. M. Fonseca Ferreira
2,3 b
, Salviano F. S. P. Soares
4,5 c
,
António Valente
6d
and Gilson L. S. Junior
1e
1
Federal Institute of Education, Science, and Technology of Piauí, Teresina, Brazil
2
Institute of Engineering of Coimbra Polytechnic of Coimbra, Coimbra, Portugal
3
INESC TEC-INESC Technology and Science and Knowledge Engineering and Decision-Support Research Center
(GECAD) of the Institute of Engineering, Polytechnic Institute of Porto, Portugal
4
IEETA – UA, Aveiro, Portugal
5
University of Trás-os-Montes and Alto Douro, Vila Real, Portugal
6
INESC TEC-INESC Technology and Science and University of Trás-os-Montes and Alto Douro, Vila Real, Portugal
Keywords: Kinect, Quaternions, Myo, EMG, Equinus Foot.
Abstract: This paper shows the advantage of using different sensors such the Microsoft Kinect and Myo Armband to
acquire movement description of the plantarflexion and dorsiflexion of the foot with the help of the
quaternions and the EMG Myo sensor. For the integration of these devices, it was chosen Python to develop
the algorithm and create an interface to aid the signal acquisition. This integration, enabling an accurate
motion description as well as a scale of EMG signal, allow the possibility of quantifying the treatment of the
people with equinus foot.
1 INTRODUCTION
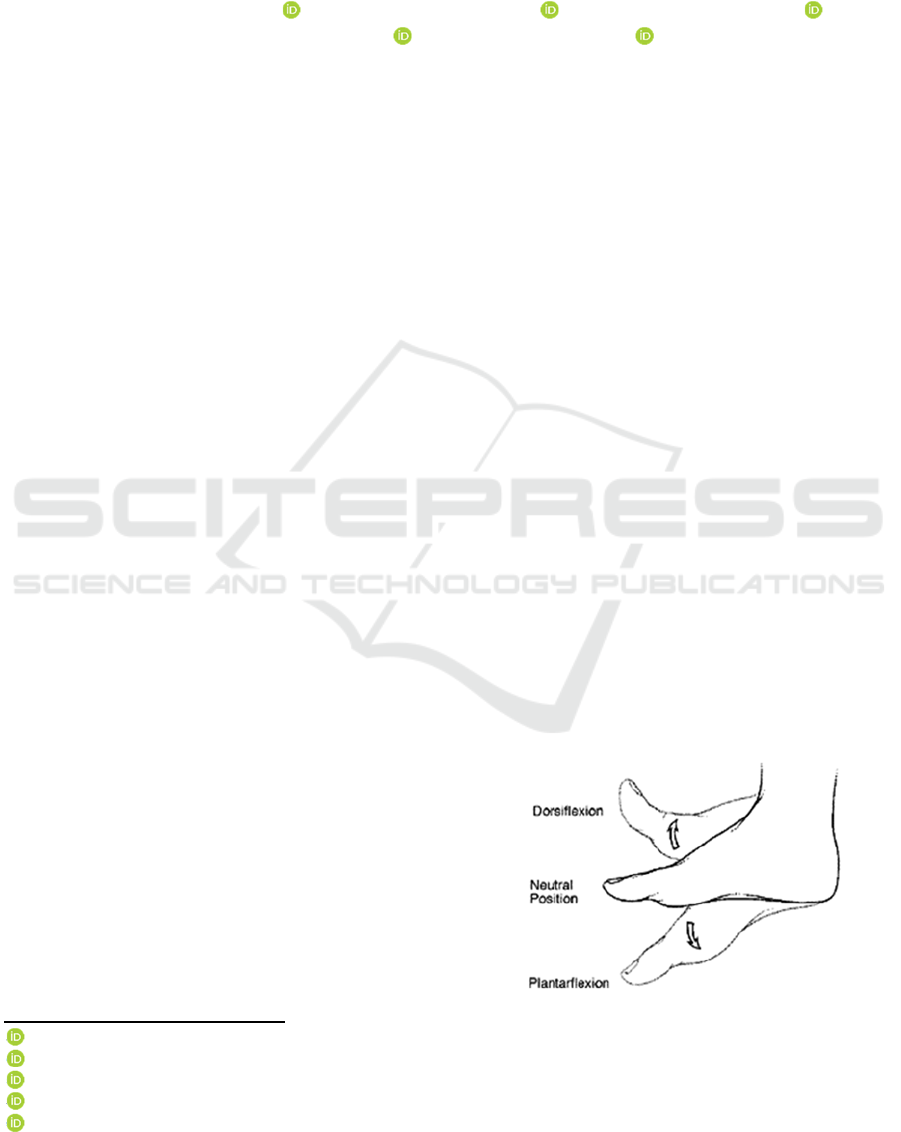
Equinus foot is a condition that is characterized by the
limitation of the dorsiflexion movement of the foot,
in normal circumstances, the foot has the ROM
(Range of motion) of 36º to the action of
plantarflexion and 7º to dorsiflexion, according to
(NASA, 2014). Because of the lack of necessary
flexibility thus leaving the foot in an extended
position. This condition may be either congenital or
acquired, caused by tensions in the Achilles tendon or
the calf muscles (Soleus, lateral gastrocnemius and
medial gastrocnemius), and according to (Schmid et
al., 2016), equinus foot is the most common issue
regarding the human gait motility affecting patients
with hemiplegic cerebral palsy, causing deviation of
the pelvis, hence creating inconsistency in the gait.
The Equinus foot implies the lack of mobility of
the patient. It is of extreme importance, to improve
a
https://orcid.org/0000-0001-8928-0077
b
https://orcid.org/0000-0002-2204-6339
c
https://orcid.org/0000-0001-5862-5706
d
https://orcid.org/0000-0002-5798-1298
e
https://orcid.org/0000-0002-5177-2065
methods of treatment, considering gains in movement
is linked to reduction of the incidence of adjacent
problems, such as infections and osteoporosis,
improvement of cardiac functions and even reducing
the dependency of an accompanying person, besides
positive psychological impacts in the process of
rehabilitation (Costa et al., 2005) and (Vital et al.,
2003; 2017 and 2018).
Figure 1: Movements of the foot - Rage of motion in the
Dorsiflexion 7º and Plantarflexion 36º.
This paper proposes to create a way of quantifying
the status of the patient as well as their improvement
along the treatment.
Araújo, F., Ferreira, N., Soares, S., Valente, A. and S. Junior, G.
Data Acquisition from the Integration of Kinect Quaternions and Myo Armband EMG Sensors to Aid Equinus Foot Treatment.
DOI: 10.5220/0007565902350240
In Proceedings of the 12th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2019), pages 235-240
ISBN: 978-989-758-353-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
235

1.1 Rotation and Translation Methods
There are many methods of describing the translation
and rotation of a rigid body, among those, we shall
briefly explain some of them as well as the reason we
chose quaternions over the others. According to
(Kenwright, 2012), the most used method of
representations is the Euler-Angles, used to
representing the orientation and translation through
three angels possessing orthogonal axes (x, y, and z)
we can achieve twelve combinations of sets of angles,
and to work with angles we have to convert them into
matrices. And while they are of easy comprehension,
they suffer from the disadvantage of the angles
changing by up to 2π radians, another problem is the
Euler coordinates are not precise when interpolating
near the Gimbal’s Lock, which occurs when two sets
of axes are aligned, turning them, in that moment in
the same axis.
In the case of matrices, even though it is a more
straightforward subject that students have early
contact with, we have as the main problem the time
to processes the amount of data, and the difficulty in
visualizing in which axis, the rotation, and the angle.
1.2 Quaternions
Quaternions are hypercomplex numbers belonging to
the numerical set
, isomorphic to numbers in the
numerical set
. Such as complex number
quaternions are defined by possessing both real and
imaginary part, wherein real coefficients multiplied
by components form the imaginary part: ̂,̂,
. They
are represented by the equation:
̂
̂
(1)
Another representation is
, where S
represents the real part and V represents the
imaginary part, when
equals to zero we will call it
pure quaternion, since it has just imaginary parts.
The operations of quaternions are responsible for
rotation and translation. To rotate a pure quaternion
to an also pure quaternion that have to use
operator ||. And we also have to know the concept of
a conjugate of a quaternion (Adorno, 2017):
Conjugate of a quaternion is defined as its real
part minus the imaginary part.
|
|
Re
Im
(2)
So, the rotation will be represented by:
T
|
|
(3)
0
1
1
,
̂
|
|
1
(4)
∗
̂
̂
̂
(5)
Figure 2: Quaternion rotation, rotation the quaternion v to
the quaternion w.
2 MATERIALS AND METHODS
2.1 The Myo Armband
The Myo armband is a wearables gesture and motion
control (Żorski and Pałys, 2016) that enables the user
to control device such as computer, tablets and
phones and it composed by nice axis-IMU with three-
axis gyroscope, three-axis accelerometer, three-axis
magnetometer, and eight EMG sensors, those sensor
allow the Myo Armband to track gestures of the user
through electrical signal.
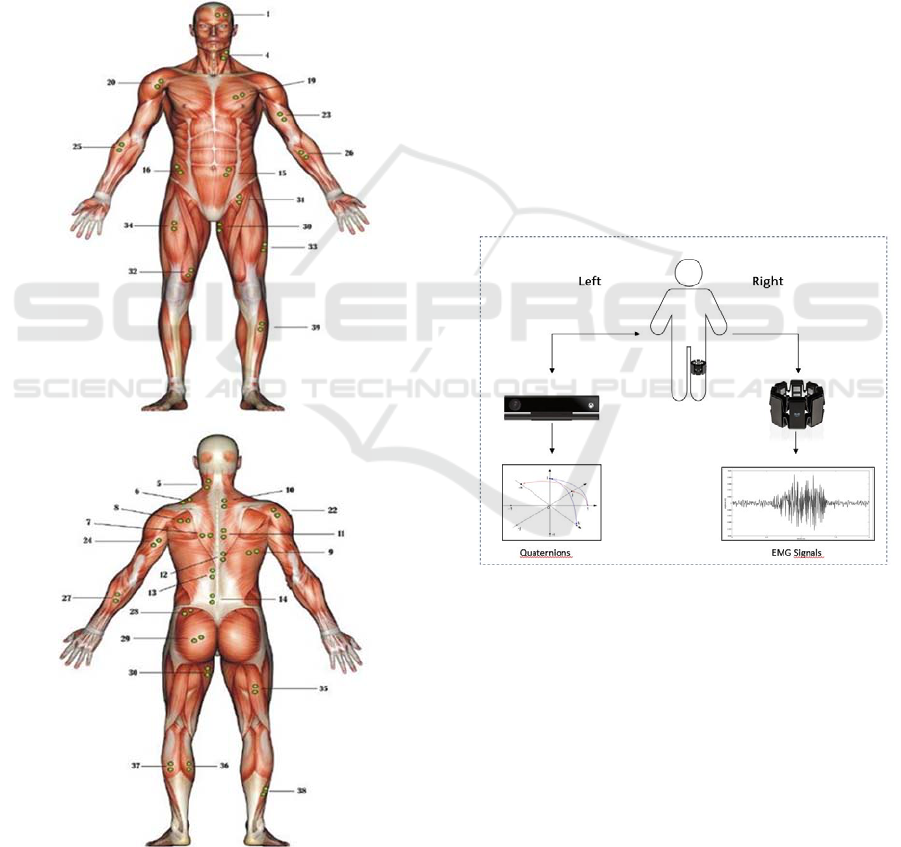
Figure 3: Myo armband - EMG sensors numbered from 1
to 8.
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
236
2.1.1 EMG Signals
In this experiment, the Myo is used in the leg, and we
are using the EMG sensors to record data from the
muscles responsible for the plantar and dorsiflexion
movement.
The EMG sensors measure electromyographic
signals, and this method consists of a non-evasive
technique that measures the electrical signals
produced by the muscles during their contraction and
relaxation, this technique was chosen because it
performs the measurement directly in the muscles to
be studied, both voluntary and will be recognized.
Figure 4: Optimal placement of the EMG sensors – 36-
medial gastrocnemius, 37-lateral gastrocnemius, 38-Soleus
and 39-Tibialis anterior.
Regarding the placement of the Myo Armband,
according to (Florimond, 2010) the best position to
place the sensors are in the muscles tibialis anterior,
soleus, medial gastrocnemius and lateral
gastrocnemius (Figure 4).
To control the test using Myo, we created an
interface to simplify the acquisition of data stipulation
a time of 1 minute, 30 seconds or 5 seconds, in the
analysis done in this paper we used the time of 5
seconds. (Micael et al., 2013) and (Dias et al., 2014).
2.2 Microsoft Kinect
The Microsoft Kinect was firstly launched in 2011,
and it brought a new way of playing video games, the
user is now able to play without having to hold any
peripherical device. According to (Pagliari et al.,
2014), Kinect is a device that enables motion capture,
among one of the advantages that Kinect brigs are
official libraries and SDKs (Software Development
Kit) which allow researchers to contribute to this
technology. In this paper, we are using the SDK 2.0
published at 10/21/2014.
Figure 5: Representation of the interface Myo-Kinect.
The motion analysis nowadays is a field of interest
among a variety of areas, and for medical application
as well. The Microsoft Kinect, according to
(Kalkbrenner et al., 2014) can be used in the
evaluation of patient activity, posture as well as
gesture recognition. Including 3D depth sensor and an
optical camera, can be used to analyse angles and
movement, enabling the acquisition of depth and even
of quaternions in any given joint, the sequences of
joints captured by the Kinect are shown in Figure 5.
Initially, we researched ways to extract data from
Kinect and found some applications developed in
Python, C # and C ++ languages. It was decided to
Data Acquisition from the Integration of Kinect Quaternions and Myo Armband EMG Sensors to Aid Equinus Foot Treatment
237
use python using the library PyKinect2 due to its easy
manipulation and quick configuration.
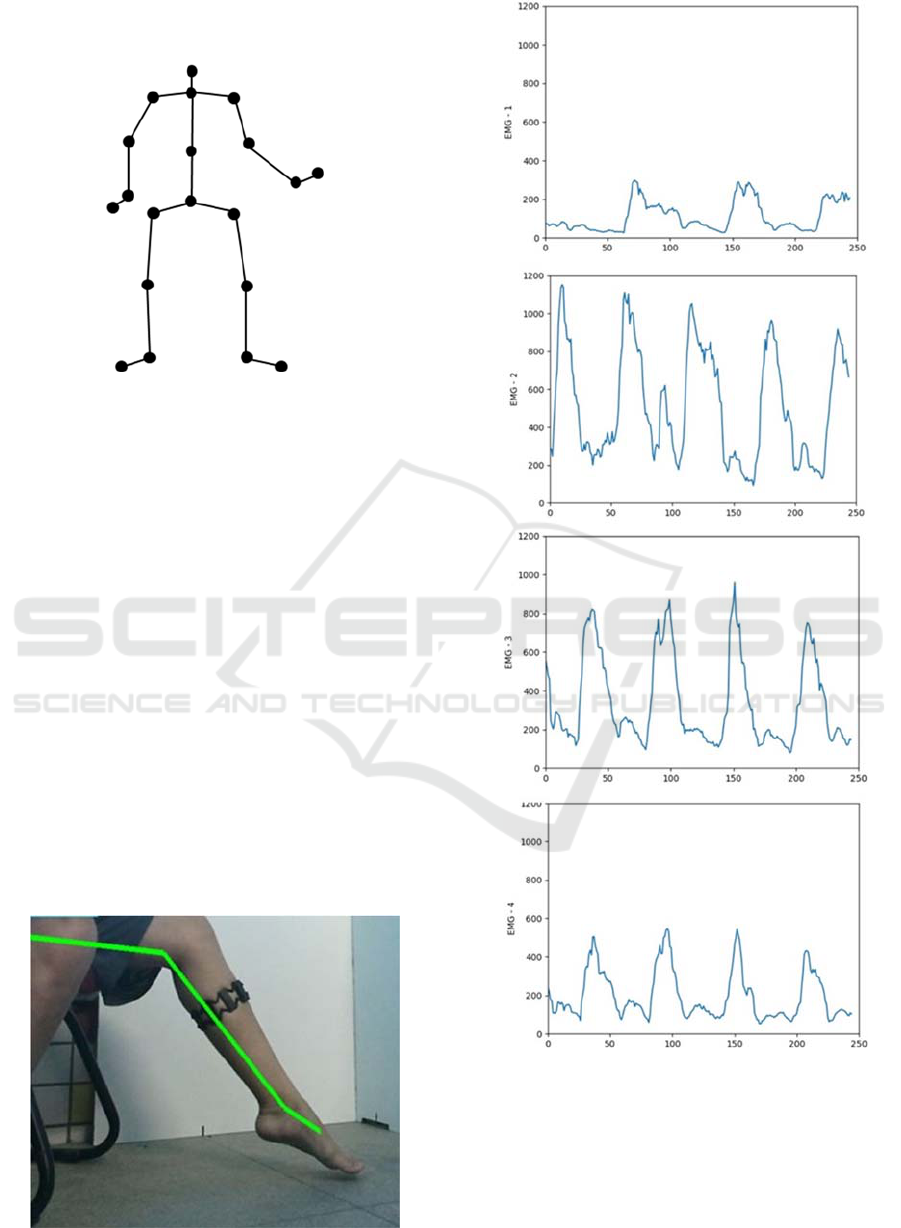
Figure 6: Sequences of joints captured by the Kinect.
After choosing the language and the application
for Kinect, it was studied its operation of to extract
data of position and rotation of each joint of the body
read by Kinect along with the results of Myo (Figure
6).
3 RESULTS AND DISCUSSIONS
The capture of the quaternions is obtained by the
motion capture of the Microsoft Kinect, while the
subject, starting of the total plantarflexion (Figure 6)
going to the total dorsiflexion., it is important to
emphasize that the foot must be positioned as
perpendicular as possible to the Kinect, the
quaternions response is a 3D graphic and the unit used
by the library we are using is in meters. And aiming
integration with Myo armband, it is essential to set a
correct position of the EMG sensor, sensor
enumerated from 1 to 8.
Figure 7: Motion capture of Kinect.
Figure 8: Representation of data – 3: soleus, 1 and 2: lateral
gastrocnemius and 4: Tibialis anterior.
The EMG sensor 4 is representing data from the
muscle tibialis anterior, sensor 5 serves the muscle
soleus, sensor 3 and 4 are representing the medial
gastrocnemius while the sensor 1 and 2 the lateral
gastrocnemius. And for the results of the Kinect, we
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
238
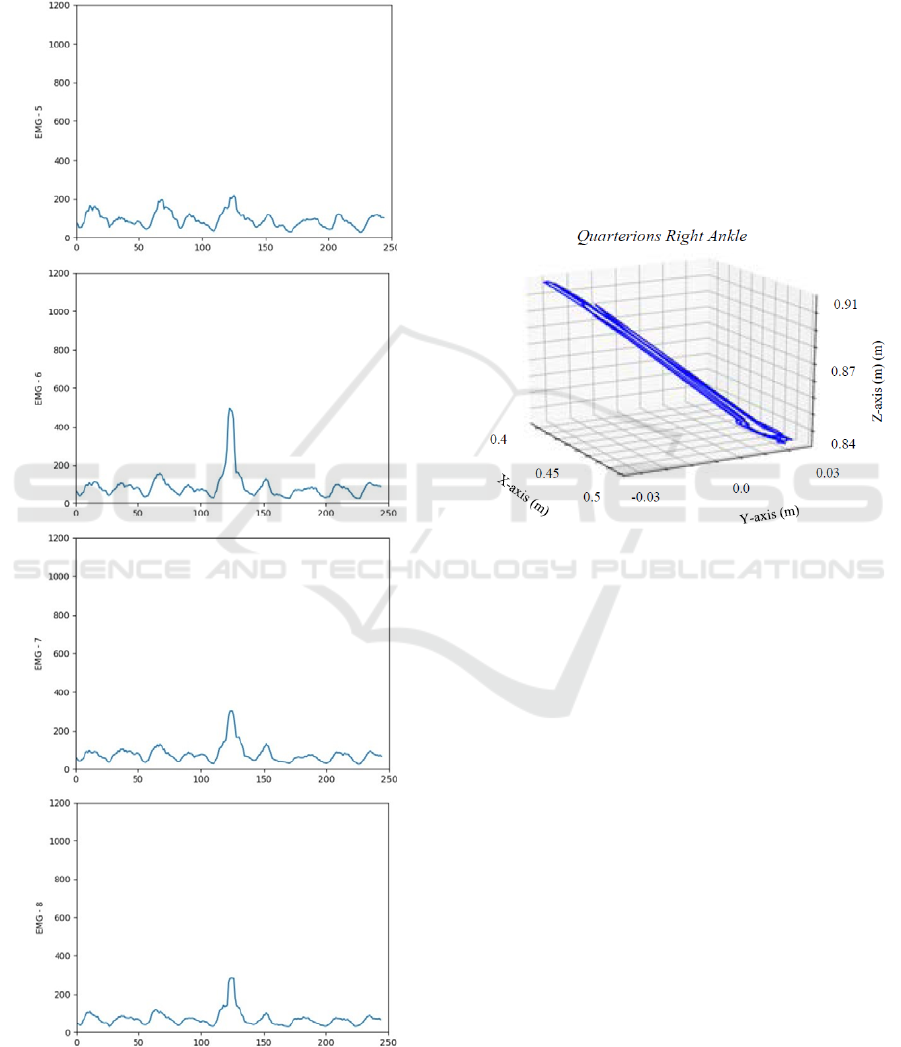
find this- graphic (Figure 10) representing the
movement of the right foot joint, with the frequency
of 30 Hz and 30fps and full HD camera. And we have
the graphic of the motion in the axes X, Y, and Z
showing in Figure 8.
Figure 9: Representation of data –7 and 8 medial
gastrocnemius.
Since quaternions can be generated both using
kinect or using third part sensor such as IMU sensors,
Żorski and Pałys, (2016) prove that the quaternions
generate by the Kinect and IMU sensors in the Myo
armband are similar, however they notice limitation
in the IMU sensor resulting in a range of 70 – 80% of
recognition of the gestures.
The IMU sensor were not used in this work
because the gesture recognition it is built just for
arms, however the EMG signal is possible to read
even if it is not assigned to any gesture, and since the
equinus foot has the characteristic of decreasing the
intensity of the electromyographic signal, the
improvement of the patient can be quantified by the
increase of the read signal.
Figure 10: The trajectory of the right foot using the motion
capture features of the Microsoft Kinect.
4 CONCLUSION
This paper proposed to integrate the motion capture
features of Microsoft Kinect and the EMG sensors of
the Myo Armband, and even though the Myo was not
designed to be used in the leg and nonetheless this
device is not primarily used to capture motion of the
leg, the EMG sensor proved useful to bring a
satisfactory accuracy, but in one hand there is the
quality of the signal of the Myo EMG in the other
hand there is the difficulty to apply any unit to its
meseuramnets, so even though they show what occurs
during the movement and it is possible to compere the
results among them it was not possible to assign any
unit.
Regarding the treatment of equinus foot with the
integration of this two devices, thanks to the
smoothness of the results of quaternions and the scale
that we can acquire from the EMG sensor we can both
describe the movement with accuracy and quantify
the improvement of the patient.
Data Acquisition from the Integration of Kinect Quaternions and Myo Armband EMG Sensors to Aid Equinus Foot Treatment
239

In order to improve the data acquisition and
aplication this process can be enhanced by using
precise EMG sensors that allow unit readings and
studying a more precise way of image caputure.
REFERENCES
Adorno, B.V. (2017), “Robot Kinematic Modeling and
Control Based on Dual Quaternion Algebra — Part I :
Fundamentals . Robot Kinematic Modeling and Control
Based on Dual Quaternion Algebra Part I :
Fundamentals Bruno Vilhena Adorno”.
Costa, N., Brown, M., Hutchins, S., Caldwell, D.G. and
Caldwellsalfordacuk, E.D.G. (2005), “Design of
Human-Friendly Powered Lower Limb Rehabilitation
Orthosis”, TDU COE-UK EPSRC Workshop on Human
Adaptive Mechatronics (HAM), No. September.
Jessica Vital, Micael S. Couceiro, Gonçalo Dias, N. M.
Fonseca Ferreira, (2015). “Tecnologias para a Análise
do Movimento Humano”, Livro de Atas do 6º
Congresso Nacional de Biomecânica, CNB2015, 6-7
Fev, Monte Real, Leiria, Portugal, ISBN 978-972-
8793-74-6.
Jessica P. M. Vital, Diego R. Faria, Gonçalo Dias, Micael
S. Couceiro, Fernanda Coutinho, N. M. Fonseca
Ferreira, (2017). “Combining discriminative
spatiotemporal features for daily life activity
recognition using wearable motion sensing suit”,
Pattern Analysis and Applications, vol 20, issue 4, pp
1179-1194. DOI: 10.1007/s10044-016-0558-7
Jessica P. M. Vital, N. M. Fonseca Ferreira, Salviano F.S.P.
Soares, António Valente, João Manuel Pereira Barroso,
(2018). “FatoXtract a new technology in
rehabilitation”, Proceedings of TISHW 2018, 2nd
International Conference on Technology and
Innovation in Sports, Health and Wellbeing, 20-22
June, Thessaloniki, Greece.
Micael S Couceiro, David Portugal, Nuno Gonçalves, Rui
Rocha, J. M. A Luz, Carlos M Figueiredo, Gonçalo
Dias, N.M. Fonseca Ferreira, (2013). "A methodology
for detection and estimation in the analysis of golf
putting", Pattern Analysis and Applications 16, 3: pp.
459 – 474, Springer London ISSN 1433-7541, 2013.
DOI: 10.1007/s10044-012-0276_8
G. Dias, JMA Luz, MS Couceiro, CM Figueiredo, NM
Fonseca Ferreira, P Iglésias, R Mendes, M Castro, O
Fernandes, (2014). “A Proposal for Detection and
Estimation of Golf Putting”, in Fonseca Ferreira N.,
Tenreiro Machado J. (eds) Mathematical Methods in
Engineering, pp. 293-303, ISBN 978-94-007-7182-6,
Springer, Dordrecht. DOI: 10.1007/978-94-007-7183-
3_27
Florimond, V. (2010), “Basics of Surface
Electromyography Applied to Physical Rehabilitation
and”, Thought Technology Ltd, Vol. 1 No. March, pp.
1–50.
Kalkbrenner, C., Hacker, S., Algorri, M. and Blechschmidt-
trapp, R. (2014), “Motion Capturing with Inertial
Measurement Units and Kinect - Tracking of Limb
Movement using Optical and Orientation Information”,
Proceedings of the International Conference on
Biomedical Electronics and Devices, pp. 120–126.
Kenwright, B. (2012), “A Beginners Guide to Dual-
Quaternions: What They Are, How They Work, and
How to Use Them for 3D Character Hierarchies”, The
20th International Conference on Computer Graphics,
Visualization and Computer Vision, pp. 1–13.
NASA. (2014), National Aeronautics and Space
Administration - HUMAN INTEGRATION DESIGN
HANDBOOK.
Pagliari, D., Menna, F., Roncella, R., Remondino, F. and
Pinto, L. (2014), “Kinect fusion improvement using
Depth Camera calibration”, International Archives of
the Photogrammetry, Remote Sensing and Spatial
Information Sciences - ISPRS Archives, Vol. 40 No. 5,
pp. 479–485.
Schmid, S., Romkes, J., Taylor, W.R., Lorenzetti, S. and
Brunner, R. (2016), “Orthotic correction of lower limb
function during gait does not immediately influence
spinal kinematics in spastic hemiplegic cerebral palsy”,
Gait and Posture, Elsevier B.V., Vol. 49, pp. 457–462.
Żorski, W. and Pałys, T. (2016), “Human motion capture
using Kinect and third party sensors”, No. 1, pp. 17–38.
BIODEVICES 2019 - 12th International Conference on Biomedical Electronics and Devices
240
