
Applying Deep Learning Models to Action Recognition of Swimming
Mice with the Scarcity of Training Data
Ngoc Giang Nguyen
1
, Mera Kartika Delimayanti
1,2
, Bedy Purnama
1,3
, Kunti Robiatul Mahmudah
1
,
Mamoru Kubo
4
, Makiko Kakikawa
4
, Yoichi Yamada
4
and Kenji Satou
4
1
Department of Electrical Engineering and Computer Science, Kanazawa University, Kanazawa, Japan
2
Department of Computer and Informatics Engineering, Politeknik Negeri Jakarta, Jakarta, Indonesia
3
Telkom School of Computing, TELKOM University, Bandung, Indonesia
4
Institute of Science and Engineering, Kanazawa University, Kanazawa, Japan
Keywords: Swimming Mouse Behaviour Recognition, Deep Learning, Transfer Learning, Data Scarcity.
Abstract: Deep learning models have shown their ability to model complicated problems in more efficient ways than
other machine learning techniques in many application fields. For human action recognition tasks, the
current state-of-the-art models are deep learning models. But they are not well-studied in applying for
animal behaviour recognition due to the lack of data required for training these models. Therefore, in this
research, we proposed a method to apply deep learning models to recognize the behaviours of a swimming
mouse in two mouse forced swim tests with a limited amount of training data. We used deep learning
models which are used in human action recognition tasks and fine-tuned them on the largest publicly
available mouse behaviour dataset to give the models the knowledge about mouse behaviour recognition
tasks. Then we fine-tuned the models one more time using the small amount of data that we have annotated
for our swimming mouse behaviour recognition tasks. The good performance of these models in the new
tasks proved the efficiency of our approach.
1 INTRODUCTION
We have been using many animals from mice, fish
to primates to study biology, psychology or develop
new types of medicines. In these researches, to
answer questions such as how animals behave in
specific environments or how their behaviours
change after using a new drug, we have to watch and
annotate many hours of their recorded videos. These
tasks are time-consuming and costly but essential for
the researches. Another problem is that human
assessments are not always consistent, so the
experiments become harder to reproduce. Therefore,
we need automated animal behaviour recognition
systems to delegate these frustrating works to
computers which are less erroneous and more
consistent in their assessments.
The works presented in (Jhuang et al., 2010) and
(Jiang et al., 2017) both proposed automated mouse
behaviour recognition systems based on the same
approach. First, relying on expert knowledge, they
created feature extractors to extract important
information from input data, such as the relative
position of the mouse and some specific points in the
scene (water faucet or food gate). Then they used the
extracted features and a classifier to predict the
behaviours of mice. One drawback of this approach
is that the feature extractors are only designed for
specific experiments. For this reason, we can not
apply these systems for our experiments unless we
exactly mimic the setups of their experiments or
redesign the feature extractors and retrain the
classifiers from scratch. We can avoid this drawback
by using deep learning models to create our systems.
Deep learning models are classifiers with built-in
feature extractors. Thus, these models can learn to
extract important features from input data without
any requirement of expert knowledge. The current
state-of-the-art models in human action recognition
tasks are deep learning models. However, to achieve
those high performances, these deep learning models
have to learn the actions from thousands of minutes
of annotated videos. Unfortunately, we do not
usually have such extensive annotated datasets
270
Nguyen, N., Delimayanti, M., Purnama, B., Mahmudah, K., Kubo, M., Kakikawa, M., Yamada, Y. and Satou, K.
Applying Deep Learning Models to Action Recognition of Swimming Mice with the Scarcity of Training Data.
DOI: 10.5220/0007567602700275
In Proceedings of the 12th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2019), pages 270-275
ISBN: 978-989-758-353-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

available to train these models for our specific
experiments.
In order to palliate the issue related to training
data scarcity, we proposed a method that does not
require a large amount of training data to apply deep
learning models to mouse behaviour recognition
tasks. In our method, we utilize deep learning
models pre-trained from human action recognition
tasks. First, we retrain these models using the largest
of the current publicly available mouse behaviour
datasets (Jhuang et al., 2010). We use this step to
give the models the knowledge about mouse
behaviour recognition tasks. Then, we use data of
our specific tasks to fine-tune these models. Because
the retrained models after the first step have learned
knowledge about mouse behaviours, we do not need
a large amount of data to train them for our specific
tasks in the second step.
In the next section, we describe the deep learning
models and the mouse behaviour dataset we used in
the first step of our proposed method. In Section 3,
we present the swimming mouse behaviour
recognition tasks we used to evaluate our method
and the results of our experiments. Finally, in
Section 4, we state our conclusions.
2 METHOD
As described in the previous section, our proposed
method has two steps. In the first step, we fine-tune
deep learning models which were used for human
action recognition tasks by using the largest publicly
available mouse behaviour dataset. Then in the
second step, we train these models again using the
data we prepared for our swimming mouse
behaviour recognition tasks. In this section, we give
the information about the deep learning models and
the mouse behaviour dataset we used in the first step
of our method.
2.1 The Two-Stream I3d Model
Carreira and Zisserman introduced the Two-Stream
Inflated 3D ConvNets (Two-Stream I3D model)
(Carreira and Zisserman, 2018), one of the current
state-of-the-art deep learning models for human
action recognition tasks. As reported, the Two-
Stream I3D models achieve 98% of accuracy on
UCF-101 human action recognition dataset
(Soomro, Zamir and Shah, 2012) and 80.9% of
accuracy on HMDB-51 human action recognition
dataset (Kuehne et al., 2011). These models are
derived from the Inception-V1 model which uses the
Inception module architecture (Szegedy et al., 2015).
Layers of the Inception modules combine filters of
different sizes and pooling kernels to utilize all their
good effects in feature extraction.
To create an I3D model, all 2D filters and
pooling kernels of an Inception-V1 model are
inflated to 3D by endowing them with an additional
temporal dimension, i.e. n × n filters become n × n ×
n filters, and the weights of the 3D filters are
bootstrapped by repeating the weights of the
respective 2D filters n times along the new temporal
dimension. This bootstrap method let the I3D
models benefit from the learned parameters of the
pre-trained 2D models.
In this research, we used the same I3D models’
architectures as described in the paper of Carreira
and Zisserman (Carreira and Zisserman, 2018). The
models were pre-trained on ImageNet data
(Russakovsky et al., 2015) for the first step of our
method. Also reported in the research of Carreira
and Zisserman, using optical flow data computed
from RGB data to train a complementary model for
the model trained on RGB data can help to improve
the prediction accuracy. Therefore, in this research,
we also utilized optical flow data, and we
experimented on various fusion ratios of RGB data
trained models and optical flow trained models to
find the best fusion ratio for the swimming mouse
behaviour recognition tasks. To compute optical
flow data from the RGB data we used the TV-L1
algorithm (Zach, Pock and Bischof, 2007).
2.2 The Mouse Behaviour Dataset
In the work of Jhuang H. et al. (Jhuang et al., 2010),
they created a dataset to train their mouse behaviour
recognition system. They have recorded and
annotated more than 9000 video clips (~10 hours of
video) of single housed mice in a home cage. There
are 8 types of behaviour annotated in this dataset:
“drink”, “eat”, “groom”, “hang”, “micro-
movement”, “rear”, “rest” and “walk”.
From the recorded video clips, they selected
4,200 clips (~2.5 hours of video) that have the most
unambiguous examples of each behaviour to create a
subset called “clipped database”. In this research, we
used this subset for the first step of our method.
3 EXPERIMENTS & RESULTS
The mouse forced swim tests are rodent behavioural
tests used to study about antidepressant drugs,
antidepressant efficacy of new compounds, and
Applying Deep Learning Models to Action Recognition of Swimming Mice with the Scarcity of Training Data
271
experimental manipulations aimed at preventing
depressive-like states as described in the research of
Can A. et al. (Can et al., 2012). In a forced swim
test, a mouse is placed in a transparent cylinder
which is filled with water for a certain period of
time. Naturally, when being placed in such a
dangerous environment, the mouse will become
panic and try to escape. But if the mouse has taken
some antidepressant drugs before, it will be less
panic than a mouse which hasn’t taken any drug.
Therefore, by measuring the duration of each
behaviour of the mouse, such as mobile behaviour
and immobile behaviour, we can estimate the effect
of the drug in the mouse.
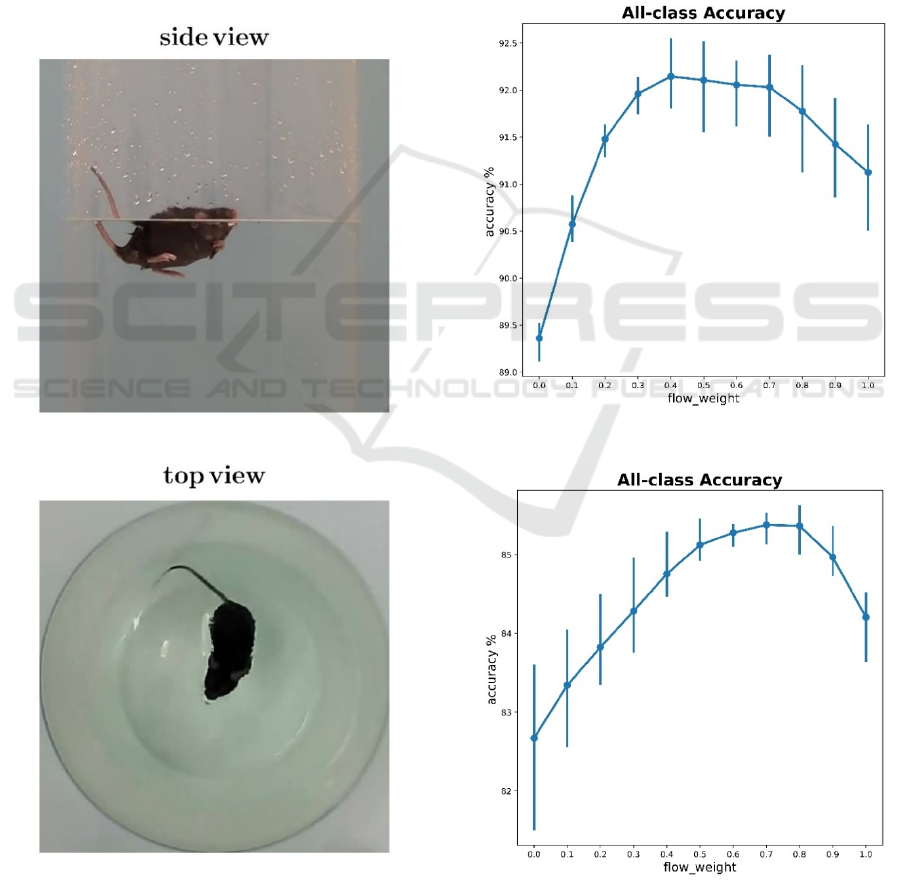
Figure 1: Example scenes of the side view data and the top
view data.
To evaluate the efficiency of our method, we
annotated two videos from mouse forced swim tests,
each video has a length of about 5 minutes. The first
video was recorded from a side view. For this side
view video we annotated three behaviours: “swim”,
“struggle” and “float”. The difference between
“struggle” behaviour and “swim” behaviour is that
when a mouse is struggling, it just slightly moves
one of its feet. When a mouse is floating, it is
immobile. The second video was recorded from a
top view, and for this video, we annotated two
behaviours: “mobile” and “immobile”. We showed
an example scene of each video in Figure 1.
Figure 2: Prediction accuracy in the side view data.
Figure 3: Prediction accuracy in the top view data.
BIOINFORMATICS 2019 - 10th International Conference on Bioinformatics Models, Methods and Algorithms
272

Figure 4: Confusion matrix of prediction in the side view
data.
Figure 5: Confusion matrix of prediction in the top view
data.
Applying Deep Learning Models to Action Recognition of Swimming Mice with the Scarcity of Training Data
273

In the first step of our experiments, we used
weights from I3D models’ checkpoints that were
pre-trained on ImageNet data to initialize parameters
of the model. We retrained them using the “clipped
database” dataset. For each sample data, we used 16
successive frames as an input to the I3D model
(current frame, its 8 previous frames and its 7 next
frames). To train the models, we used a momentum
optimizer with a momentum value equals to 0.9 and
a learning rate starts from 1e-3 and decays to 5e-5
after several thousands of iterations. We used the
dropout technique in fully connected layers with a
keep-probability of 36% to reduce the effect of
overfitting when we train the models.
After the first step, we have two I3D models, one
was trained on RGB data from “clipped database”
and the other was trained on optical-flow data from
“clipped database”. In the second step, we fine-tuned
the two models using RGB data and optical-flow
data from the swimming mouse behaviour data that
we have annotated. To fine-tune the models, we also
used a momentum optimizer with a momentum
value of 0.9 and a learning rate starts from 1e-3 and
decays to 5e-3. We also used the dropout technique
with a keep-probability of 36%.
To test the effect of different fusion ratios of
RGB data trained models and optical flow data
trained models, we used two parameters flow_weight
and rgb_weight, i.e. flow_weight = 0.3 then
rgb_weight = 0.7 and it means the fusion ratio is
30% of optical flow data trained models and 70% of
RGB data trained models. In our experiments we
examined flow_weight values from 0 to 1 with a
step of 0.1 and respectively with rgb_weight values
equal to 1 - flow_weight values to find out the best
fusion ratio.
To calculate the prediction accuracies of the
models, we separated the data into 10 folds and
conducted 10-fold cross-validation. The prediction
accuracies of our method for each fusion ratio in the
side view data and the top view data are shown in
Figure 2 and Figure 3.
The confusion matrices of the models in the side
view data for different fusion ratios are shown in
Figure 4. For the top view data, the confusion
matrices are shown in Figure 5.
For the side view data, the models perform well
on predicting “swim” and “float” behaviours but
have some difficulty in predicting “struggle”
behaviours. For the top view data, the models have
some problems in distinguishing “mobile” and
“immobile” behaviours because in some “immobile”
samples the water surface is still shaking as a result
of the previous “mobile” behaviour. So we may need
more data to help the models understand these cases.
In the side view swimming mouse behaviour
recognition task, our method achieved the best
performance at the fusion ratio of 40% of optical
flow data trained models and 60% of RGB data
trained models with the prediction accuracy of
92.14%. In the top view swimming mouse behaviour
recognition task, the best performance of our method
is 85.38% of prediction accuracy with the fusion
ratio of 70% of optical flow data trained models and
30% of RGB data trained models.
4 CONCLUSIONS
In this research, we have proposed a method to
apply deep learning models to mouse behaviour
recognition tasks to achieve high prediction
accuracies without the requirement of a large
amount of training data. The results of the
experiments proved the efficiency of our approach.
With this approach, we will attempt to create a
framework to apply deep learning models to general
mouse behaviour recognition tasks and also for other
specific mouse related experiments.
In further researches, we will develop our
method to apply deep learning models to other
animal behaviour recognition tasks.
ACKNOWLEDGEMENTS
In this research, the super-computing resource was
provided by Human Genome Center, the Institute of
Medical Science, the University of Tokyo.
Additional computation time was provided by the
super computer system in Research Organization of
Information and Systems (ROIS), National Institute
of Genetics (NIG). This work was supported by
JSPS KAKENHI Grant Number JP18K11525.
REFERENCES
Jhuang, H., Garrote, E., Yu, X., Khilnani, V., Poggio, T.,
Steele, A. D., Sere, T., 2010. Automated home-cage
behavioural phenotyping of mice. In Nature
communications.
Jiang, Z., Crokes, D., Green, B.D., Zhang, S., Zhou, H.,
2017. Behaviour recognition in mouse videos using
contextual features encoded by spatial-temporal
stacked Fisher vectors. In Proceeding of International
Conference on Pattern Recognition Applications and
Methods.
BIOINFORMATICS 2019 - 10th International Conference on Bioinformatics Models, Methods and Algorithms
274

Carreira, J., Zisserman, A., 2018. Quo Vadis, Action
Recognition? A New Model and the Kinetics Dataset.
In Proceeding of IEEE Conference on Computer
Vision and Pattern Recognition.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.
Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich,
A., 2015. Going Deeper with Convolutions. In
Proceeding of IEEE Conference on Computer Vision
and Pattern Recognition.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., Fei, L. F., 2015. ImageNet
Large Scale Visual Recognition Challenge. In
International Journal of Computer Vision.
Can, A., Dao, T. D., Arad, M., Terrillion, E. C.,
Piantadosi, C. S., Gould, D. T., 2012. The Mouse
Forced Swim Test. In Journal of Visualized
Experiments: JoVe.
Zach, C., Pock, T., Bischof, H., 2007. A duality based
approach for realtime TV-L1 optical flow. In
Proceeding of 29th DAGM Symposium of Pattern
Recognition.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., Serre, T.,
2011. HMDB: a large video database for human
motion recognition. In Proceeding of the International
Conference on Computer Vision.
Soomro, K., Zamir, A. R., Shah, M., 2012. UCF101: a
dataset of 101 human actions classes from videos in
the wild. In Proceeding of IEEE Conference on
Computer Vision and Pattern Recognition.
Applying Deep Learning Models to Action Recognition of Swimming Mice with the Scarcity of Training Data
275
