
Unsupervised Learning of Scene Categories on the Lunar Surface
Thorsten Wilhelm
1
, Rene Grzeszick
2
, Gernot A. Fink
2
and Christian W
¨
ohler
1
1
Image Analysis Group, Department of Electrical Engineering, TU Dortmund University, 44227 Dortmund, Germany
2
Pattern Recognition in Embedded Systems Group, Department of Computer Science, TU Dortmund Universtiy,
44227 Dortmund, Germany
Keywords:
Remote Sensing, Scene Detection, CNN, Unsupervised Learning.
Abstract:
Learning scene categories is a challenging task due to the high diversity of images. State-of-the-art methods
are typically trained in a fully supervised manner, requiring manual labeling effort. In some cases, however,
these manual labels are not available. In this work, an example of completely unlabeled scene images, where
labels are hardly obtainable, is presented: orbital images of the lunar surface. A novel method that exploits
feature representations derived from a CNN trained on a different data source is presented. These features are
adapted to the lunar surface in an unsupervised manner, allowing for learning scene categories and detecting
regions of interest. The experiments show that meaningful representatives and scene categories can be derived
in a fully unsupervised fashion.
1 INTRODUCTION
Unsupervised learning of scene categories is a chal-
lenging and worthwhile task. The advantage of unsu-
pervised learning is easily at hand. The necessity of
annotations is eliminated, which vastly reduces the
human effort necessary to reach a meaningful divi-
sion of the analyzed image data. In this work it will
be shown, that it is possible to achieve a meaningful
categorization by entirely relying on unsupervised le-
arning algorithms.
A large amount of publicly available image data,
which was previously not analyzed with respect to
scene categorization, are satellite images of the lunar
surface. These images can be seen as a special form
of natural scene images. The Lunar Reconnaissance
Orbiter (LRO) is a satellite orbiting the moon since
2009 with the objective to analyze the lunar surface
with various scientific instruments, including laser al-
timeters and cameras. The quest of the LRO is di-
verse and includes finding possible landing sites, and
constructing high resolution maps of the moon. The
data are publicly available and hosted by the Natio-
nal Aeronautics and Space Administration (NASA).
In detail, we use the data provided by the Wide Angle
Camera (WAC) global mosaic described in (Speyerer
et al., 2011), which has a spatial resolution of 100
meters per pixel and covers the complete surface of
the Moon, to look for repeating scenes on the lunar
surface. A possible set of scenes is depicted in Fi-
gure 1 with typical scenes being plains, mountains,
highlands, valleys and craters.
Annotations of the lunar surface are scarce and
restricted to the most prominent features like craters
with a large diameter, or the large plains of the near-
side of the moon called lunar mare. It is therefore
hardly possible to use state-of-the-art image classi-
fication approaches like Convolutional Neural Net-
works (CNNs) which are typically trained in a fully
supervised manner.
One option in such cases is to employ crowd sour-
cing in order to obtain scene or object annotations
(Patterson and Hays, 2012; Perona, 2010). This re-
quires a large number of human annotators and dis-
tributes the annotation effort. In contrast, unsuper-
vised scene learning tries to reveal information wit-
hout the need for annotations. As a result, this task
becomes challenging, especially due to the diversity
of scene images typically requiring top-down know-
ledge. It is usually achieved by either a pure clus-
tering approach with handcrafted features like GIST
(Oliva and Torralba, 2001) or HoG (Dalal and Triggs,
2005). Deep Learning approaches apply Deep Belief
Networks (DBN) (Lee et al., 2009) in which several
Restricted Boltzmann Machines (RBM) are stacked.
The network is then trained by Contrastive Diver-
gence (CD), which is comparable to gradient descent
(Lee et al., 2009).
Another challenge is that in contrast to SAR ima-
ges of terrestrial surface, the number of information
614
Wilhelm, T., Grzeszick, R., Fink, G. and Wöhler, C.
Unsupervised Learning of Scene Categories on the Lunar Surface.
DOI: 10.5220/0007569506140621
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 614-621
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
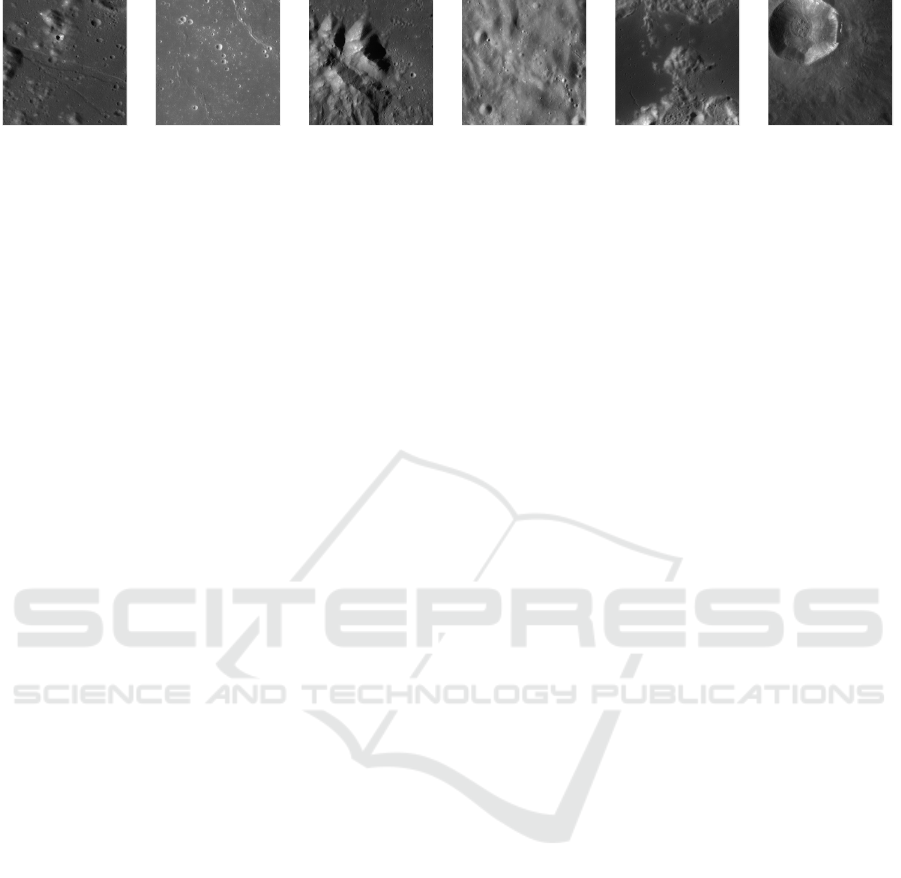
(a) Escarpments (b) Plains (c) Mountains (d) Highlands (e) Valleys (f) Crater
Figure 1: Examples of possible scene categories on the lunar surface extracted from LROC WAC global mosaic (Speyerer
et al., 2011). The range varies from valleys to mountains to more Moon specific scenes like the crater heavy plains. Each
image depicts an area of roughly 920km
2
of the lunar surface.
cues is limited (H
¨
ansch, 2014) to grey level intensi-
ties. Furthermore, due to the low resolution of the
WAC images, the number of pixels that is available
for context is also limited.
Leveraging the capabilities of CNNs, a novel met-
hod which combines the strength of pre-trained net-
works with unsupervised learning is proposed. The
method is able to transfer the feature representation
obtained from pre-trained convolution kernels of a
CNN to the novel lunar data, which is then used to
derive object-like detectors and finally group the ob-
ject appearances into meaningful scene categories.
2 METHOD
For recognizing different scenes on the lunar surface,
it is desirable to have a very descriptive feature repre-
sentation for a given patch p on the surface. State-of-
the-art feature representations can be obtained using
CNNs. However, as labeled data is hardly available,
learning a feature representation using a CNN is not
possible. On the other hand it is also very difficult
to design a meaningful handcrafted feature represen-
tation. In the following it will be shown how to le-
verage learned feature representations from a CNN
trained on a different data source for unsupervised
learning. An overview of an unsupervised detector
and scene learning approach are shown in Fig. 2 and
Fig. 3, respectively. From an intermediate layer of
the CNN a feature representation for yet unknown pa-
tches of the lunar surface is derived. Similar to the
Bag-of-Features principle these patches are then clus-
tered in an unsupervised manner using spherical k-
means clustering. This yields a set of representatives
that can be found on the lunar surface, but may as
well occur on any image (e.g. simple edges). For the
detection, a set of negative samples is used in order
to compute the distribution of the representatives on
arbitrary images. Choosing a quantile of least occur-
ring representatives, a set of representatives that is
most discriminative for the lunar surface is chosen.
These representatives are then used as candidates for
detecting different types of lunar surface, e.g. craters
or mountains. For the scene learning, the occurren-
ces of the representatives are clustered again on scene
level, yielding a set of similar scenes. Furthermore,
both scene and detection representatives can be anno-
tated by a human user in order to train a detector or
typical scenes with minimal annotation effort.
2.1 Feature Representation
The VGG16 CNN architecture is used as a basis for
generating the feature representation (Simonyan and
Zisserman, 2014). The convolution part of the net-
work is designed of stacked 3 × 3 convolution lay-
ers and each two convolution layers are followed by a
2 × 2 max pooling layer. Hence, the context is enlar-
ged by two pixels or multiplied by two in the layers
respectively. For example, the context of the first two
convolution layers is 3 × 3 and 5 × 5 pixels. The next
step is a max pooling procedure yielding a context of
10 × 10 pixels. Hence, after five stages of convolu-
tion and pooling layers a context of more than 200
pixels is obtained. For recognition tasks, the convo-
lution part is then followed by fully connected layers.
As the resolution of the images is low, the patch size
that can be used for context is also limited and infor-
mation must be obtained within a context of much less
pixels. Here, the activations of a learned convolution
filter are chosen as the feature representation for the
patch m (cf. (Razavian et al., 2014)). The convolution
layer can be chosen according to a desired size for the
patch m.
A huge advantage of these off-the-shelf features
is that such a representation can be pre-trained on a
separate dataset (i.e., ImageNet (Deng et al., 2009)).
Given the assumption that the training set contains a
large variability at least a subset may be of interest
for the task at hand. In the following, a new set of
representatives will be learned based on the feature
representation derived from the convolution layer.
Unsupervised Learning of Scene Categories on the Lunar Surface
615

CNN Training
Patch Repr.
Representatives
for Detection
Quantization
Labeled
Training Set
Lunar
Surface Data
Clustering Outlier
Negative
Image Set
...
...
Figure 2: Overview of the proposed detection method. A Convolutional Neural Network is trained on a labeled dataset (i.e.,
ImageNet (Deng et al., 2009)). From an intermediate layer of the Network a feature representation for yet unknown patches
of the lunar surface is computed. Similar to the Bag-of-Features principle these patches are then clustered in an unsupervised
manner. Then a set of negative samples is used in order to compute the distribution of these cluster centroids on arbitrary
images. Choosing a quantile of least occurring representatives, a set of representatives that is most discriminative for the lunar
surface is chosen. These representatives can then be chosen for detection.
CNN Training
Patch Repr.
Scenes
Quantization
Labeled
Training Set
Lunar Surface Data
Clustering
...
Multinomial
Mixture Model
...
...
Figure 3: Overview of the scene learning. As for the detection, a CNN is trained on a labeled dataset and features are derived
from an intermediate layer. Clustering these features and quantizing the representation at every pixel in an image then given a
new representation for an image, as is done for image classification in Bag-of-Features approaches. These are then clustered
on scene level using a multinomial mixture model in order to obtain different sets of scenes.
2.2 Unsupervised Learning of Filter
Masks
Following the Bag-of-Features principle (Csurka
et al., 2004) the activation of the different convoluti-
ons are clustered in order to obtain a new representa-
tion in an unsupervised manner. A set of patches m
m
m is
randomly drawn and the activations are derived from
the CNN. As the distribution of the activation does
not necessarily follow those of an Euclidean space,
the cosine distance (Baeza-Yates et al., 1999)
d(i, j)
cos
= 1 −
f
f
f
i
· f
f
f
j
|| f
f
f
i
|||| f
f
f
j
||
(1)
is known to work well, where f
f
f
i
and f
f
f
j
are the fe-
ature representations for patch i and j. Spherical
k-means clustering is employed to the data (Zhong,
2005), computing a set of centroids c
c
c. The centroids
of the clustering process yield a combination of the le-
arned filters from the pre-trained filter masks that des-
cribe the new dataset of patches from the lunar surface
well.
The next step is to find those representatives that
are especially descriptive for the lunar surface and not
just arbitrary images. Hence, a set of negative image
I
I
I
n
n
n
is chosen. For these images a set of negative fe-
atures n
n
n is computed at each possible location in the
image. Hence, a large number of negative patches is
computed. All patches are assigned to the set of cen-
troids c
c
c by hard quantization:
argmin
j
1 −
n
n
n
i
· c
c
c
j
||n
n
n
i
||||c
c
c
j
||
∀ j (2)
This gives a distribution over all centroids. From
these a quantile γ is chosen as the most discrimina-
tive patch representations.
2.3 Detection
After a set of filter masks is determined, detection
is carried out by computing the Pearson product-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
616

16
9
10
16
16
8
16
16
16
8
16
16
10
10
8
10
8
12
16
27
19
16
6
21
8
9
9
9
10
1
8
5
21
10
16
16
5
6
9
6
16
8
6
8
8
8
16
1
27
6
15
21
19
16
1
16
26
5
6
8
15
27
16
5
19
6
21
27
27
26
18
15
9
8
27
21
5
6
27
16
5
5
6
16
4
5
1
10
9
8
8
12
10
15
21
12
21
26
27
16
12
5
9
12
15
8
10
9
8
10
1019
12
26
8
9
26
16
26
11
12
8
26
9
5
1
12
9
9
15
26
12
13
26
8
5
26
5
16
12
12
6
1
26
1
5
26
26
21
6
26
6
136
9
26
21
6
9
5
5
26
1
6
9
5
5
27
1
1
6
27
12
16
26
5
26
26
5
12
21
18
8
5
6
27
12
2
26
26
1
26
26
26
26
5
26
26
26
11
27
12
5 1
27
26
21
5
5
12
12
21
1
21
12
8
5
1
26
1
26
26
5
5
6
21
1
5
6
21
26
26
18
5
12
1
10
12
1
10
5
26
5
21
21
5
10
26
26
5
12
26
1
18
21
12
26
26
26
26
21
26
27
12
26
5 6
Figure 4: Subset of the detections on the NAC dataset used for crater evaluation. Ground truth crater positions are marked
by a green cross. Detections of the crater filter are shown by green bounding boxes. The filter number is noted inside the
bounding boxes for comparison. Note how filter eight frequently detects small craters, which are not marked by the ground
truth.
moment correlation coefficient r (Fisher, 1915). For
two datasets x and y with n samples r is computed by
r
xy
=
∑
n
i=1
(x
i
− ¯x)(y
i
− ¯y)
q
∑
n
i=1
(x
i
− ¯x)
2
q
∑
n
i=1
(y
i
− ¯y)
2
. (3)
The correlation coefficient offers the advantage of
a low computational burden even for large datasets,
and is independent of linear transformations, which
makes the detection robust against possibly occurring
linear transformations.
We assume that a filter detects something in an
image if the corresponding correlation coefficient be-
tween the image representation and the filters at any
given position surpasses a certain threshold θ
r
, which
may be set globally or individually for every filter.
Non maximum suppression (NMS) (Felzenszwalb
et al., 2010) is used to reduce the amount of overlap-
ping detections, which naturally occur around basins
of attractions in the image. Due to the unsupervised
nature of the training process, similar filter masks may
have a high correlation coefficient at similar locations
in the image. By using NMS we restrict ourselves
to those filter masks with the highest detection confi-
dence in a specific region. The amount of overlap can
be adjusted by a threshold θ
nms
.
2.4 Unsupervised Scene Learning
Based on the detections we try to derive an underlying
scene, which can be interpreted as a latent variable.
Therefore, histograms of the detections are computed
for every image I
I
I
i
. The feature representation of the
images is the same as described in Section 2.1. Ba-
sed on the histograms of the detections a Multinomial
Mixture Model (MMM) with a fixed number of com-
ponents is used to model different object distributions
among different images.
The multinomial distribution has the probability
density function (pdf) (Murphy, 2012, p. 35)
M
d
(x;p) ∼
Γ
∑
N
i=1
x
i
+ 1
∏
N
i=1
Γ(x
i
+ 1)
N
∏
i=1
p
x
i
i
, (4)
where d indicates the dimension of the distribution, Γ
the Gamma function, p a vector of probabilities and
the observed counts x. The resulting mixture model
is then
p(X|Θ
Θ
Θ) =
C
∏
i=1
π
i
M
d
(X;θ
θ
θ
i
), (5)
with C as the number of components and the elements
π
π
π are the corresponding mixture weights. The para-
meters of the whole model are summarized in a set of
parameters Θ.
The model will be estimated in a Bayesian
fashion, so that the mixture weights and the latent pa-
rameters z indicating the class memberships of every
datum are given appropriate probability distributions
as well. We assume that the mixture of latent varia-
bles z follows a categorical distribution with
p(z;π
π
π) =
C
∏
i=1
π
z
i
i
, (6)
and the mixture weights π
π
π are given by a Dirichlet
distribution, because it is the conjugate distribution
(Raiffa, 1974) to a categorical distribution. This me-
ans that the posterior distribution is given in analy-
tical form and there is no need for computationally
demanding posterior inferences for this variable. The
dirichlet distribution has the pdf
p(π
π
π;α
α
α) =
Γ(
∑
C
i=1
α
i
)
∏
C
i=1
Γ(α
i
)
C
∏
i=1
π
α
i
−1
i
, (7)
with the hyperparameter α
α
α controlling the shape of
the distribution, which may be used to model the prior
Unsupervised Learning of Scene Categories on the Lunar Surface
617

Figure 5: Visualization of the five nearest neighbors according to the cosine similarity for some of the computed centroids.
The range changes from craters of varying shape and position to pure plains and hill-like structures.
knowledge available about the mixture weights. Note
the analytical similarity to Eq. 6, due to the conjugate
nature of the distributions. Further, the probabilities
p
i
of every multinomial M
d
are given a Dirichlet prior
for the same reason. To estimate Θ we use Markov
Chain Monte Carlo (MCMC) with conjugate poste-
rior updates (Congdon, 2014).
3 EVALUATION
The presented approach has been evaluated on a set
of images of the lunar surface to derive a meaning-
ful scene representation. Note that only a very rough
ground truth describing the properties of the surface
is available. For example, the most prominent craters
have been annotated or some of the larger mountains.
To give some idea of how accurate the derived filter
masks are, we evaluated the detections on an entirely
different dataset, where annotations for some craters
are available. This is described in Section 3.2. In the
following we describe some details of the implemen-
tation.
3.1 Implementation Details
For the clustering process 400 randomly drawn pat-
ches are extracted from each positive image I
p
. The
patch size is set to 32 × 32 pixels and the filter re-
sponse from the conv3 2 layer of the VGG16 net cen-
tered at the patch is used for generating the feature
representation of the patch.
The set of negative images I
I
I
n
n
n
is generated based
on the 15 Scenes dataset (Lazebnik et al., 2006). The
dataset has been chosen as it shows arbitrary scenes
and greyscale images, which is an important property
of the lunar surface images. All images in the dataset
have been used as negative samples.
A set of 500 representatives c
c
c has been used in the
clustering process. A subset of these is depicted in
Fig. 5, where the five image patches with the lowest
cosine distance are presented. It can be seen that the
variation of typical lunar elements is captured well by
the learned centroids.
3.2 Detection
To evaluate the accuracy of the learned filter masks an
annotated ground truth will be used. Since the avai-
lability of possible annotations is scarce, we restrict
ourselves to evaluate the accuracy of the most promi-
nent feature on the lunar surface, craters. In detail, we
use annotations provided by (Fisher, 2014) in which
craters with diameters varying from 5 to 41 meters
are marked. The spatial resolution of the analyzed or-
bital images areas amounts to 0.5 meters per pixel,
the excerpts are part of Narrow Angle Camera (NAC)
(Chin et al., 2007) image M126961088LE. The ana-
lyzed region is an area around the crater Hell Q which
has a diameter of 4 km and is among lunar scientists
an interesting field for the study of secondary impact
craters, which need to be considered when estimating
the age of a surface area based on crater counts (Fis-
her, 2014).
Note that our approach alleviates the necessity to
include the light direction, the surface albedo, or any
other information apart from the grayscale image into
the detection process. Therefore the detection is more
robust with respect to different illumination conditi-
ons on the planetary surface and can readily be app-
lied to similar problems on different planetary surfa-
ces. Illumination changes are a frequent issue occur-
ring in conjunction with orbital images, because the
data are usually acquired in a bush-broom manner,
where different areas of the planet are scanned in dif-
ferent time steps, during which the position towards
the sun naturally changes.
Further, the filter masks are trained on the enti-
rely different WAC global mosaic which has a redu-
ced spatial resolution of roughly 100 meters per pixel.
However, we assume that craters appear on every pos-
sible scale on the surface and yet remain comparable
across different scales. Of course, this poses anot-
her challenge for the learned filter masks apart from
the possible change in illumination with respect to the
training data.
Table 1 provides a summary of the detection re-
sults. Additionally, the same experiments have been
done with patches of the greyscale image data as fea-
tures. While the true positive rate is encouraging, the
false positive rate seems unusually high. The reason
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
618
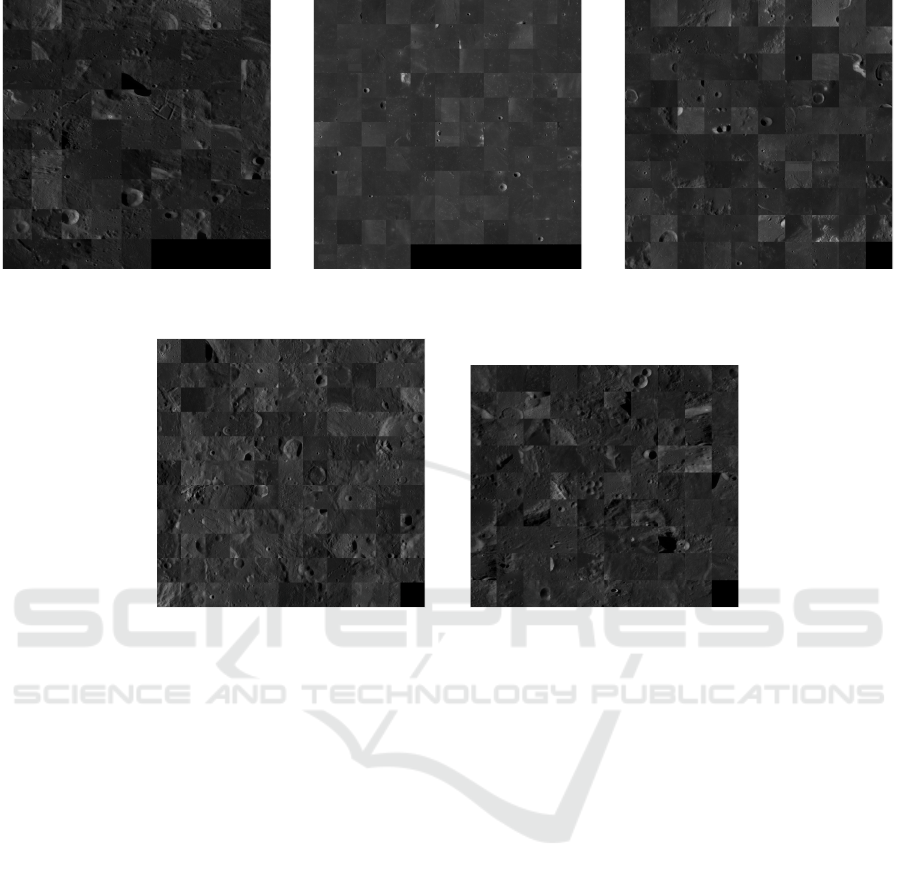
(a) Big structures scene (b) Lunar mare scene (c) Lunar mare with distinctive featu-
res scene
(d) Farside with distinctive features
scene
(e) Farside scene
Figure 6: Visualization of the derived categorization based on the object detections assuming that five different scenes are
present in the analyzed data. The resulting scene categories meaningfully divide the data in lunar mare and lunar highland
scenes. A further distinction between these two scenes is made by differentiating between the presence and absence of
distinctive lunar features like large craters, mountains, valleys, or the number of small craters present in the scene.
for this behavior is that our algorithm is not able to
distinguish between craters below or above a certain
threshold, but detects every possible crater-like struc-
ture which is similar to a centroid. In Fig. 4 a subset
of the analyzed area is depicted. It is worth noting
that all ground truth positions are covered by a boun-
ding box. While this explains the good recognition
results, the reason for the high false positive rate is
evident as well. A large number of craters, especially
the smallest ones, are not comprised by the ground
truth. However, our algorithm detects a vast majority
of the them as well. In (Fisher, 2014) it is stated that
only craters with a diameter ranging from 5 m to 41 m
are marked. Obviously, our algorithm detects craters
with a diameter less than 5 m.
3.3 Scene Learning
Apart from craters, other characteristic scenes are
prominent on the lunar surface. This includes ridges,
escarpments, crater chains, mountains, valleys, lunar
mare, or lunar highlands. An overview is depicted in
Fig. 1.
Our second goal was to show that it is possible to
derive meaningful scenes in an unsupervised manner
based on the object detections of the previous section.
The mixture model described in Section 2.4 is used
to achieve this goal. The idea is that every scene has
a unique distribution over objects which are present
in the image. A lunar mare scene would for instance
have a high probability of exhibiting small craters and
plain area patches. In contrast, a scene from the far
side of the Moon would have a high probability at fe-
atures which describe a rough surface and small pro-
babilities on the plain area features.
To stress our uncertainty regarding the mixture
weights, we choose to set every entry of the hyper-
parameter α
α
α to one, and do the same for the prior on
p, the feature probabilities of every multinomial. The
mixture weights π
π
π, the latent variables z indicating
the class membership, and the p
i
are estimated with
MCMC. The resulting scene categorization is shown
Unsupervised Learning of Scene Categories on the Lunar Surface
619

Table 1: Evaluation of the crater classifier for various thresholds θ
r
used to compute the correlation coefficient between every
datum and every centroid c
i
. True positive rate (TPR), false positive rate (FPR), false negative rate (FNR), and specificity
(SPC) are presented. Besides the results with CNN features, results for the same analysis with greyscale values as features
(Px) are presented as a baseline for comparison. Best values are marked in bold. The relatively high false positive rate of the
CNN is due to the fact that craters smaller than 5 m are not comprised by the ground truth.
TPR FPR FNR SPC
θ
r
CNN Px CNN Px CNN Px CNN Px P N
0.65 0.962 0.202 0.032 0.004 0.038 0.798 0.968 0.996 890 1143 750
0.70 0.923 0.140 0.028 0.003 0.078 0.860 0.972 0.997 890 1143 750
0.75 0.836 0.096 0.021 0.002 0.164 0.905 0.979 0.998 890 1143 750
0.80 0.570 0.054 0.010 0.001 0.430 0.946 0.990 0.999 890 1143 750
0.85 0.136 0.012 0.005 0.001 0.864 0.981 0.995 0.999 890 1143 750
in Fig. 6. However, annotations are too scarce to eva-
luate the accuracy. Therefore we restrict ourselves to
a visual inspection.
The found categorization can be divided into two
major categories, lunar mare and highland. While the
former is most dominant in Fig. 6b, the latter is sum-
marized in Fig. 6e. The MMM further derived a scene
which summarizes the boundary between lunar mare
and lunar highland and is depicted in Fig. 6c. This fine
distinction is worth noting and underlines the success
of the presented approach. The remaining scenes des-
cribe either large structures, like ridges or parts of big-
ger craters, or contain scenes where the far side of the
Moon is shown with distinctive features.
4 CONCLUSION
A novel approach towards unsupervised scene lear-
ning has been described. Based on a pre-trained CNN,
state-of-the-art feature representations are adapted to
images of the lunar surface. The resulting feature
representations have been clustered with spherical
k-means in a Bag-of-Features approach to extract
object-like detectors capturing frequently occurring
patterns in the dataset. The accuracy of a subset of
the detectors is evaluated on an annotated dataset of
craters on the lunar surface. Based on the learned ob-
ject detections a scene representation is learned in a
Bayesian fashion. The resulting categorization mea-
ningfully divides the analyzed data into typical lunar
scenes, like lunar mare, lunar highlands, and the bor-
der regions between both.
ACKNOWLEDGMENT
The annotation data of the Hell Q region were provi-
ded by Kurt Fisher. This work has been funded by the
Deutsche Forschungsgemeinschaft (DFG, German
Research Foundation) – Projekt number 269661170.
REFERENCES
Baeza-Yates, R., Ribeiro-Neto, B., et al. (1999). Modern
information retrieval, volume 463. ACM press New
York.
Chin, G., Brylow, S., Foote, M., Garvin, J., Kasper, J., Kel-
ler, J., Litvak, M., Mitrofanov, I., Paige, D., Raney, K.,
et al. (2007). Lunar reconnaissance orbiter overview:
The instrument suite and mission. Space Science Re-
views, 129(4):391–419.
Congdon, P. (2014). Bayesian statistical modelling, volume
704. John Wiley & Sons.
Csurka, G., Dance, C., Fan, L., Willamowski, J., and
Bray, C. (2004). Visual categorization with bags of
keypoints. In Workshop on statistical learning in com-
puter vision, ECCV, volume 1, pages 1–2. Prague.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
volume 1, pages 886–893. IEEE.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, 2009. CVPR 2009. IEEE Conference on, pages
248–255. IEEE.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimi-
natively trained part-based models. IEEE Transacti-
ons on Pattern Analysis and Machine Intelligence,
32(9):1627–1645.
Fisher, K. (2014). An age for hell q from small diameter
craters. In Lunar and Planetary Science Conference,
volume 45, page 1421.
Fisher, R. A. (1915). Frequency distribution of the values
of the correlation coeffients in samples from an inde-
finitely large popu;ation. Biometrika, 10(4):507–521.
H
¨
ansch, R. (2014). Generic object categorization in PolSAR
images-and beyond. PhD thesis, TU Berlin.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recog-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
620

nizing natural scene categories. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
volume 2, pages 2169–2178.
Lee, H., Grosse, R., Ranganath, R., and Ng, A. Y. (2009).
Convolutional deep belief networks for scalable unsu-
pervised learning of hierarchical representations. In
Proceedings of the 26th Annual International Confe-
rence on Machine Learning, pages 609–616. ACM.
Murphy, K. P. (2012). Machine Learning: A Probabilistic
Perspective. The MIT Press.
Oliva, A. and Torralba, A. (2001). Modeling the shape
of the scene: A holistic representation of the spatial
envelope. International journal of computer vision,
42(3):145–175.
Patterson, G. and Hays, J. (2012). Sun attribute database:
Discovering, annotating, and recognizing scene attri-
butes. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
Perona, P. (2010). Vision of a Visipedia. Proceedings of the
IEEE, 98(8):1526–1534.
Raiffa, H. (1974). Applied statistical decision theory.
Razavian, A., Azizpour, H., Sullivan, J., and Carlsson, S.
(2014). CNN features off-the-shelf: an astounding ba-
seline for recognition. In IEEE Conference on Compu-
ter Vision and Pattern Recognition Workshops, pages
806–813.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Speyerer, E., Robinson, M., Denevi, B., et al. (2011). Lunar
reconnaissance orbiter camera global morphological
map of the moon. In Lunar and Planetary Science
Conference, volume 42, page 2387.
Zhong, S. (2005). Efficient online spherical k-means cluste-
ring. In IEEE International Joint Conference on Neu-
ral Networks (IJCNN), volume 5, pages 3180–3185.
IEEE.
Unsupervised Learning of Scene Categories on the Lunar Surface
621
