
Exploring the Context of Recurrent Neural Network based
Conversational Agents
Raffaele Piccini and Gerasimos Spanakis
Department of Data Science and Knowledge Engineering, Maastricht University,
Keywords:
Conversational Agents, Recurrent Neural Networks, Hierarchical Recurrent Encoder Decoder.
Abstract:
Conversational agents have begun to rise both in the academic (in terms of research) and commercial (in terms
of applications) world. This paper investigates the task of building a non-goal driven conversational agent,
using neural network generative models and analyzes how the conversation context is handled. It compares
a simpler Encoder-Decoder with a Hierarchical Recurrent Encoder-Decoder architecture, which includes an
additional module to model the context of the conversation using previous utterances information. We found
that the hierarchical model was able to extract relevant context information and include them in the generation
of the output. However, it performed worse (35-40%) than the simple Encoder-Decoder model regarding
both grammatically correct output and meaningful response. Despite these results, experiments demonstrate
how conversations about similar topics appear close to each other in the context space due to the increased
frequency of specific topic-related words, thus leaving promising directions for future research and how the
context of a conversation can be exploited.
1 INTRODUCTION
Interactive conversational agents, also known as Dia-
logue Systems, or more informally Chatbots, are be-
coming increasingly popular in recent years among
researchers and companies. The reason for this rise
in popularity is the wide set of possible applications,
ranging from customer services and technical support
to video-games and other forms of entertainment. Ad-
ditionally, the potential for conversational agents has
significantly improved in recent years. Advancements
in the field of Machine Learning and the introduction
of new Deep Recurrent Neural Networks, made possi-
ble the creation of dialogue systems capable of more
meaningful interactions with the users such as (Ser-
ban et al., 2016).
Conversational agents could be divided (among
many other ways) into two categories; goal-driven
systems: when the agent has a specific predetermined
task to fulfill, such as customer service, and non-goal-
driven systems. This paper will deal with the lat-
ter category, trying to generate meaningful conversa-
tions, with no goal to fulfill, as goal-driven systems
would require large corpora of task-specific simulated
conversations. Nevertheless, the model might eventu-
ally prove useful also for goal-driven tasks.
This paper explores the application of different
Encoder-Decoder architectures to generate answers.
We compares a simple Encoder-Decoder architec-
ture with a Hierarchical Recurrent Encoder Decoder
(HRED) and we seek answers as to how the quality of
answers improved. Additionally, the way that HRED
network encodes entire conversations in the context
latent space will be investigated as to whether it can
provide more coherent answers. Finally, an attempt to
visualize the context space will be attempted in order
to confirm where conversations about similar topics
lie.
2 RELATED WORK
The traditional approach for Conversational Agents
follows a modular approach, dividing the process into
three modules: a Natural Language Understanding
(NLU) unit, a Dialogue Manager and a Natural Lan-
guage Generation module (NLG). The NLU mod-
ule will process the input and extract useful informa-
tion. This information is then used by the Dialogue
Manager to update internal states, send a query to a
knowledge-based system, or simply follow precoded
instructions. Finally, the NLG will use the informa-
Piccini, R. and Spanakis, G.
Exploring the Context of Recurrent Neural Network based Conversational Agents.
DOI: 10.5220/0007574203470356
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 347-356
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
347

tion from the Dialogue Manager to generate the out-
put sentence. The simplest technique used for NLU
is to spot certain keywords in the input, often work-
ing together with a script-based Dialogue Manager.
However, throughout the years there have been many
attempts to improve the NLU unit to better extract
text information, using techniques including statis-
tical modeling of language (Manning et al., 1999),
skip-gram models (Mikolov et al., 2013b) and, more
recently, deep neural networks (Collobert and We-
ston, 2008). Eventually, with the rise of Deep Learn-
ing in recent years, Dialogue Systems research has
mainly focused on end-to-end models, capable of in-
cluding all 3 modules in a single deep neural network,
trained on a large dataset. One end-to-end RNN archi-
tecture proved particularly successful in recent years
is the Encoder-Decoder.
The use of Encoder-Decoder architectures for nat-
ural language processing was first proposed as a so-
lution for text translation, in 2014 by (Cho et al.,
2014). From then on, the architecture has been ap-
plied to many other tasks, including conversational
agents (Serban et al., 2017). However, generating re-
sponses was found to be considerably more difficult
than translating between languages, probably due to a
broader range of possible correct answers to any given
input. A limitation of Encoder-Decoder models to
produce meaningful conversations is the fact that any
output is only influenced by the latest question. Thus,
important factors are ignored, such as the context of
the conversation, the speaker, and information pro-
vided in previous inputs. In 2015, Sordoni et al. pro-
posed an updated version of the Encoder-Decoder ar-
chitecture, called Hierarchical Recurrent Encoder De-
coder (Sordoni et al., 2015) (HRED), originally used
for query suggestions. In their paper, they demon-
strate that the architecture is capable of using context
information extracted by previous queries to generate
more appropriate query suggestions. This paper will
attempt to apply such architecture to a dialogue sys-
tem.
3 DESCRIPTION OF MODELS
3.1 Recurrent Neural Networks
A Recurrent Neural Network (RNN) is a neural net-
work which works on variable length sequences in-
puts x = (x
1
, x
2
... x
l
). Its output consists of a hidden
state h, which is updated recursively at each time step
by
h(t) = f (h(t − 1), x
t
) (1)
where f can be any non-linear activation function. For
the scope of this paper f was chosen to be a Long
Short Term Memory (LSTM) unit. The reason why
RNNs are particularly suited for the task of generat-
ing conversations is their ability to receive variable
length inputs by encoding them in a fixed length vec-
tor. Moreover, they are also able to produce variable
length outputs, which is essential when working with
sentences which are likely going to be of different
lengths. When receiving an input sentence s = (w
1
,
w
2
... w
l
) where l is the length, the RNN will up-
date its hidden state h recursively for every element
of the input sequence, in such a way that at any step
t, h(t) is a fixed length vector representing all the en-
tire sequence (w
1
, w
2
... w
t
) up to time-step t. After
receiving the last input w
l
, the hidden state will then
be representing the entire sequence.
Another interesting property of RNNs is their abil-
ity to learn the probability distribution of a sequence.
In this specific case, it would learn the probability of
a word p to be the next, knowing the previous words
in the sentence.
P(w
t
|w
1
, w
2
...w
t-1
). (2)
This can be useful to represent syntactical and gram-
matical rules and produce believable answers.
3.2 Word Embeddings
RNNs cannot accept strings as input, thus a way to
encode each word into a numerical vector is required.
For this paper, word2vec (using Python’s Gensim Li-
brary) was used (Mikolov et al., 2013a). Word2vec
uses a neural network to map each word of the vocab-
ulary to a vector space, in which words with similar
meaning are closer together. This approach should
make it simpler for the chatbot to extract informa-
tion from the input. The word2vec model was used
with two different approaches. The first approach was
to use a pre-trained word2vec model. This method
fixes the embedding matrix, and it does not allow it
to be trained with the rest of the model. When using
this approach, the output layer uses a linear activation
function to output a vector directly in the embedding
space. The output vector is then compared to the vec-
tors of the words in the vocabulary, and the closest
one is chosen as the output word. The second ap-
proach was to use the pre-trained word2vec model to
initialise an embedding layer, connected to the input
of the Encoder. The embedding weights would then
train with the rest of the network, giving it the possi-
bility to adapt to the specific task. When using this ap-
proach, the output layer has the same dimension as the
vocabulary, and it uses the softmax activation function
to produce a valid probability distribution. The output
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
348

word is then chosen according to the output probabil-
ity vector. The differences in performance between
the two approaches are explored in Section 4.
3.3 Encoder-Decoder
An Encoder-Decoder is an architecture (see Figure 1)
that uses two RNNs to learn to encode a variable-
length sequence into a fixed-length vector and to de-
code the fixed-length vector back into a variable-
length sequence.
Figure 1: Computational graph of the Encoder-Decoder ar-
chitecture.
This architecture can be used to learn the condi-
tional probability distribution over a variable-length
sequence, conditioned on a different variable-length
sequence.
P(w1, w2...wl
1
|v1, v2...vl
2
). (3)
The Encoder is a Recurrent Neural Network that
reads each word of the input sentence sequentially.
After each word, the hidden state of the RNN will be
updated according to Eq.(1), until it reads the end-
of-sentence token (<EOS>), after which it becomes
a vector representation of the entire input sentence.
The Decoder is a RNN trained to generate the output
sentence by predicting the next word in the sentence,
conditioned not only by all the previously generated
words, but also by the vector representation of the in-
put sentence. When generating the first word of a sen-
tence, the input will be the begin-of-sequence token
(<BOS>). After that, the input will include every
word previously predicted by the Decoder. Further-
more, to condition the answer on the input sequence,
the RNN is initialised with the hidden state of the en-
coder when generating each new element.
3.4 Hierarchical Recurrent Encoder
Decoder
The Hierarchical Recurrent Encoder Decoder
(HRED) model is an extension of the simpler
Encoder-Decoder architecture (see Figure 2). The
HRED attempts to overcome the limitation of the
Encoder-Decoder model of generating output based
only on the latest input received. The HRED model
assumes that the data is structured in a two-level
hierarchy: sequences of sub-sequences, and sub-
sequences of tokens. In the case of conversational
data, each conversation can be modelled as a se-
quence of sentences, and each sentence as a sequence
of words.
The HRED model consists of three different
RNNs: an Encoder, a Decoder, and a context mod-
ule. The encoder will handle the data at the lower
hierarchical level by processing each word in a sen-
tence, to encode the sentence in a fixed length vector.
The sentence vector representation is then given as
input to the context module. The context RNN han-
dles the data at the higher hierarchical level by itera-
tively processing all the sentence vectors of a conver-
sation and updating its hidden state after every sen-
tence. By doing so, the context vector represents the
entire conversation up to the last sentence received.
The output of the Context RNN is then used to ini-
tialize the hidden state of the Decoder RNN (simi-
larly to the encoder-decoder, where the hidden state of
the encoder was used to initialise the decoder), which
will generate the output sentence. The initialization of
the Decoder with a vector representing the entire con-
versation (compared to using the vector of the input
sentence) allows HRED to use context information to
generate a more appropriate answer. The output is not
only conditioned on the input sentence, but also on all
the input sentences received during the current con-
versation session. HRED is said to be hierarchical as
the Encoder and Context RNNs work to encode infor-
mation at the two hierarchical levels of the conversa-
tion. The encoder will try to find short-term correla-
tion within the input sentence, and the context RNN
will work at a higher level finding long-term correla-
tions, across different sentences within the same con-
versation.
Exploring the Context of Recurrent Neural Network based Conversational Agents
349
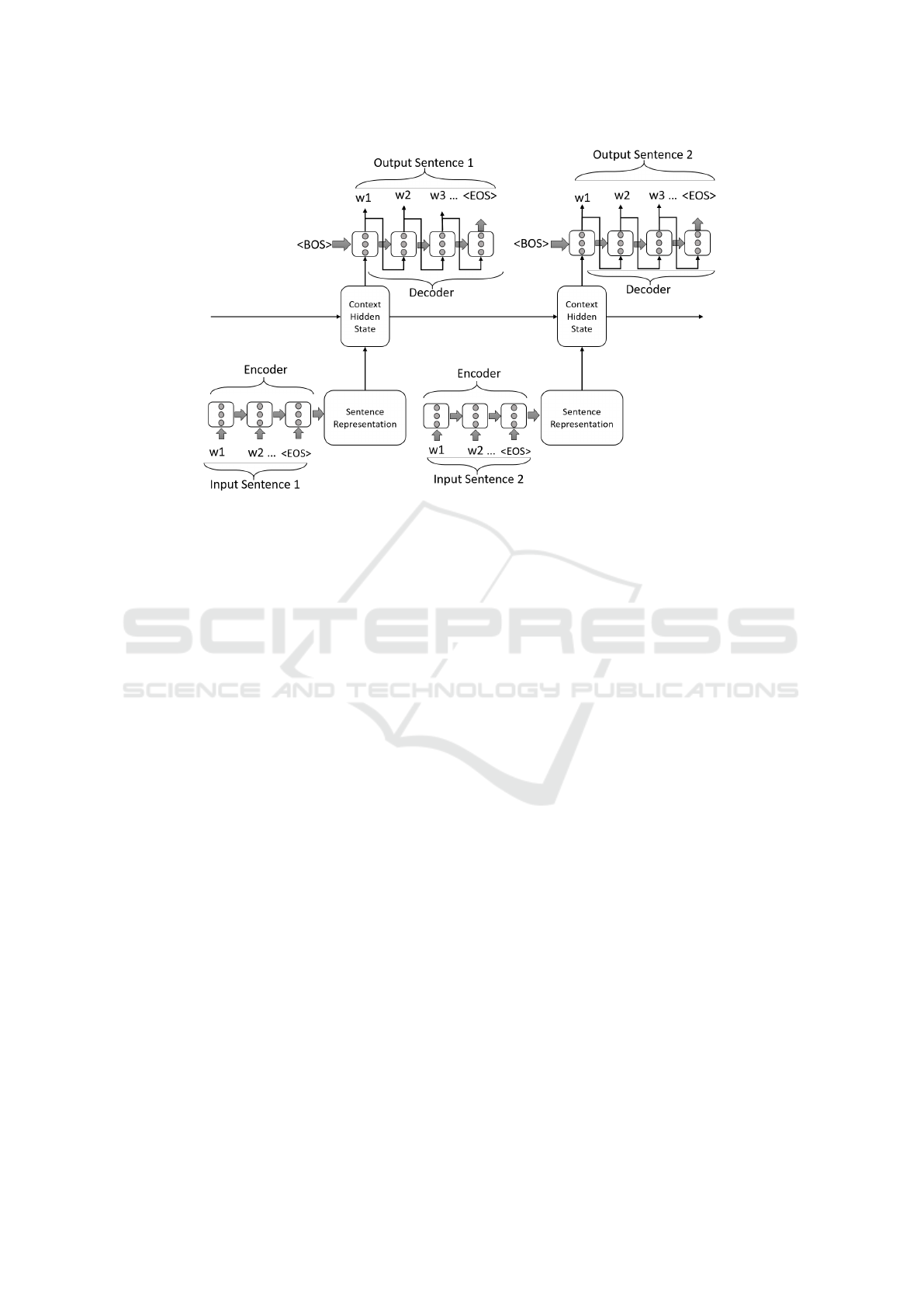
Figure 2: Computational graph of the HRED architecture for a conversation composed of 2 turns.
4 EXPERIMENTS
In this section we describe the dataset used for exper-
imentation followed by the evaluation process of the
different models. Finally, all experiments with their
results are presented.
4.1 Dataset
In order to test the extraction of context information,
a dataset following the hierarchical structure assumed
by HRED is needed. The dataset needs to be com-
posed of multiple dialogues, each of which should be
a sequence of sentences, as a simple list of questions
and answers would not have any context information.
The dataset DailyDialogue is a high-quality multi-
turn dialogue dataset, which contains conversations
about every-day life (Li et al., 2017) and therefore is
ideal for the task of non-goal-driven conversational
agents. Some basic pre-processing was performed
on the data-set, although, punctuation was left un-
chagned, in order for the chat-bot to learn to use it as
well. The DailyDialogue dataset also includes topic
labels for each conversation. These labels can be used
to compare the context representations of the conver-
sations. For the experiments, only the 5 most common
topics were used. In Section 4.5, experiments will
explore whether conversations labelled with the same
topics are close together in the context latent space.
4.2 Evaluation Method
In order to determine the consistency of the output
quality, each sentence is evaluated by a user according
to two measures:
The first is a binary metric equivalent to whether
the output is syntactically correct. This will include
the use of punctuation, the use of the end-of-sequence
token, and also the correct formulation of a sentence
with a valid grammatical structure (including correct
use of verbs, adverbs, subjects, names etc.).
The second metric evaluates how appropriate an
answer is to the input sentence, and in the case of the
hierarchical architecture, also how appropriate it is in
the context of the whole conversation. This second
evaluation is the most important, especially in com-
paring the Encoder-Decoder with the HRED architec-
ture. The evaluator will decide whether the response
was “good”, “decent“, or “wrong”. An output sen-
tence is considered of “good” quality if it is a valid
answer to the input sentence, and if it is pertinent to
previous sentences in the conversation. The quality is
considered “decent” when the answer is a meaningful
sentence, and it applies to the input only in part, or
not entirely. A “wrong” output is when the sentence
does not make sense. Some examples of responses
with their evaluations are shown in Table 1.
Human evaluation was performed by volunteers
who were instructed to have a conversation with the
bot about a given topic. A total of 19 volunteers were
interviewed, and they performed on average 7 turns
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
350
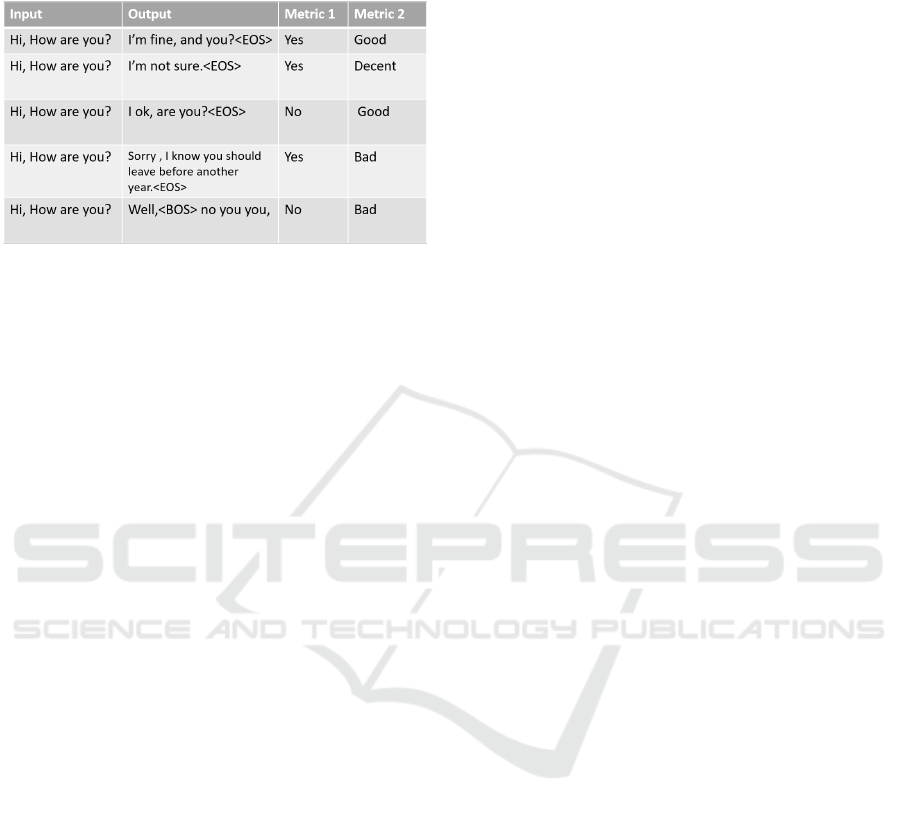
Table 1: Some examples of the evaluation of different out-
puts for the same input, according to the two metrics de-
scribed above.
of conversation for each one of the 5 topics given.
4.3 Experimental Setup
The code for this paper was written using the python
implementation of Keras. The neural network’s pa-
rameters are learned by maximising the training log-
likelihood using the RMSProp optimiser. For all ex-
periments, the embedding size was tested with a di-
mension of 100 and 300. Because of GPU memory
limitations, the hidden state was fixed to a dimension
of 300, and the depth of all the modules was kept to
2.
Initially, the training was performed by trying to
predict at each step an entire sentence. This approach
resulted in terrible quality outputs, often consisting
in the same word repeated or the use of the end-of-
sentence token as first output word. It appears that
training the model by predicting single words instead
gives better results, although this approach will make
training significantly slower as the weights are up-
dated after every word and not after every sentence.
Keras require the input of its models to be squared
numpy arrays; this requires all conversations in a
batch to be of the same length. Similarly, at step i,
the i
th
sentence of all conversations in a batch need
to have the same length so that the input vector is a
squared matrix. To do so, the dataset is sorted by
the length of their conversation in order to reduce
the padding necessary to make all conversations in a
batch the same length. In the case of a shorter con-
versation, a new empty sentence is added (an empty
sentence is composed by a begin-of-sentence token
immediately followed by an end-of-sentence token).
The data also had to be adjusted with zero padding
at the level of the individual sentences. Because of
memory limitation the batch size was set between 70
to 100.
4.4 Models Comparison
Embedding. The goal of the first experiment is to
compare the two different ways the word embedding
is used to represent the input and outputs. The first
approach consists of using the word2vec model to ini-
tialise an embedding layer used as input. The output
layer will have the dimension of the vocabulary, and it
uses a softmax activation function, to generate a valid
probability distribution over every word in the dictio-
nary. The output is then chosen according to the prob-
ability vector. The second approach consists of train-
ing a word2vec model separately from the rest of the
system, and use it to convert both input and output
in n-dimensional vectors (where n is the embedding
dimension). The output layer has a linear activation
function so that the model predicts vectors in the em-
bedding space. The vector is then compared to all
the vectors in the dictionary using cosine similarity to
find the closest match.
Both approaches were tested on a simple encoder-
decoder architecture and only the best performing
version is used for the experiments with the HRED
version. The training for both models were performed
on a GeForce GTX 960M GPU for about 32 hours.
Some examples of responses generated by both mod-
els are shown in Table 2.
The results of the experiment show that the second
approach learns to generate shorter sentences, which
are often extremely vague and mostly grammatically
correct. Because of their vagueness, they often apply
to the input sentence, thus giving the impression that
the answer is somehow appropriate to the input. For
this reason, most of the testing volunteers graded the
answers generated by this approach higher than the al-
ternative. On the other hand, the first approach gener-
ated sentences that are less often correct from a gram-
matical point of view, making mistakes including re-
peating the same word twice when not necessary, and
wrong use of punctuation. The response generated by
this approach appears to be often a longer and more
complex sentence, and although it mostly does have a
correct structure, it often mistakenly uses words, mak-
ing the response less meaningful.
The result of the questionnaire is firmly in favour
of the second approach. Nearly all the volunteers
(95%) judged the second chatbot as the best of the
two, as it was able to generate a valid answer more
often than the first, both grammatically and semanti-
cally, thanks to the fact that those answers were usu-
ally incredibly vague and could have applied to a sub-
stantial number of different inputs. Although the sec-
ond model appears to perform better, a larger dataset
and longer training might result in a different conclu-
Exploring the Context of Recurrent Neural Network based Conversational Agents
351
Table 2: Some example responses of the two different approaches. The answer labelled with “Model 1” is generated by
the embedding approach with a probability vector generated by a softmax activation. The one labelled ”Model 2” uses the
representation of input and output directly through vectors in the embedding space.
Input Output
Hey! Do you want to have lunch with me tomorrow after the game?
Model 1: I’ll meet you, but I need to drive to the ties
<NUMBER>, I guess I can, but I won’t
Model 2: You bet, go for it!
Hello, how are you today? It’s such a sunny day, I feel like going for a walk
Model 1: Perhaps you should leave it to another con-
tract. You never know what
Model 2: Alright!
We should meet your brother, I heard he is a funny guy. Is he going to be at the party?
Model 1: What about the other? It is more incredibly
enjoyable
Model 2: Well, I’m afraid so. But don’t worry about
it!
Hi, how are you?
Model 1: I’ am sorry and you?
Model 2: Don’t ask me!
Can you help me find a jacket of my size?
Model 1: Well, you know it! Consider it done!
Model 2: How can I help you!
sion, as neither of the networks seems to have been
trained long enough (and on a deep enough network)
to learn the semantic relation between words and use
them according to their meaning. The second model
appears better only because it learned to generate very
vague responses.
Table 3: Comparison of the accuracy metrics described in
subsection 4.2.
Model Encoder-Decoder 1 Encoder-Decoder 2
Metric1 28% 58%
Metric 2 Good 12% 30%
Metric 2 Decent 20% 31%
Metric 3 Bad 67% 38%
Hierarchical Model. The second experiment aims
at comparing the Hierarchical Recurrent Encoder-
Decoder Architecture, to its simpler version, the
Encoder-Decoder model. For this test, both of the net-
works will use a separately trained word2vec model
to convert inputs and outputs into vectors, as it was
the method that gave the best results among the two
embedding techniques (see Experiment 1). This com-
parison will reveal whether the Hierarchy structure of
the HRED will help it generate more appropriate an-
swers given the context of the conversation. These
models were trained on a GeForce GTX 960M GPU
for a total of about 45 hours.
Table 4 displays some examples of outputs gen-
erated given an input and a context. The Encoder-
Decoder model is the same used in experiment one,
the only difference is the amount of training, as for
the second experiment the model was trained for a
longer time. Although the performance does not seem
to change much; The Encoder-Decoder produces very
vague answers to any input, so that the output is often
a valid response. On the other hand, the HRED tries
to produce more specific outputs, also using the high-
level information extracted with the context layer. It
is clear from the answers generated that the network
is able to extract some context information, as there is
an increase in the use of words associated with other
words in previous sentences. When the context con-
tains a lot of work-related words, the model is more
likely to generate outputs with words such as “work”,
“colleague”, “contract”, “office” etc. Similarly, when
using words associated with vacations and tourism,
some common outputs are names of countries, and
words such as “visiting”, “Museum”, “Hotel” etc...
Unfortunately, although the network is able to extract
some context information, it does not seem to be able
to use it to form meaningful sentences. Therefore, the
result is often a complex response (more complicated
than the simplistic and vague answers of the Encoder-
Decoder), usually containing quite a lot of grammat-
ical mistakes. In addition, although the words it uses
are often appropriate to the context, it fails in us-
ing them in a meaningful way, thus generating sen-
tences that often do not make much sense. Because
of these reasons the results of the questionnaire are
strongly in favour of the simpler Encoder-Decoder
model (88% of the interviewed people preferred the
Encoder-Decoder).
4.5 Context Representation
This subsection will include two experiments aiming
at investigating the encoding of the sentences in the
context space by the context module.
Topics Clustering. The goal of this experiment is
to compare vector representations of different con-
versations (in the context space) in order to deter-
mine whether conversations about similar topics are
close to each other. After the HRED model is trained,
all sentences of the dataset are encoded by the con-
text module in a vector. Once all conversations are
mapped into vectors in the context space, a technique
called “t-distributed stochastic neighbor embedding”
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
352

Table 4: Some example responses for the encoder-decoder model and HRED model.
Context Input Output
Did you buy your books for school?
Where is the math notebook? → I don’t
want to go to school, I don’t like math,
it’s boring
We have to go, pack your bag Enc-Dec: I told you so!
HRED: Please don’t worry
about it!
Where are we going for holidays this
summer? → What about we go in Eu-
rope? We can visit museums and go to
the beach.
We have to go, pack your bag Enc-Dec: I told you so!
HRED: Oh, what do you
want to see? I don’t there
there is anything good Ger-
man out!
We have a new colleague at work, he
is the new operations manager → Is he
good at his job? → No. He doesn’t
know what he is doing, he was hired be-
cause he is friend with the CEO
Are you going to do something
about it?
Enc-Dec: Well, I don’t
know what to do about it
HRED: I work before Bron.
Yankees play tonight.
How is it going with your boyfriend? →
Six months ago he asked me to marry
him and how he cheated on me with an-
other woman, I can’t just let it go
Are you going to do something
about it?
Enc-Dec: Well, I don’t
know what to do about it
HRED: I will get through it
Table 5: Comparison of the accuracy metrics described in
subsection 4.1.
Model HRED Encoder-Decoder
Metric1 38% 58%
Metric 2 Good 16% 30%
Metric 2 Decent 23% 32%
Metric 3 Bad 60% 31%
(Maaten and Hinton, 2008) (t-SNE) is used to visual-
ize the context space in only two dimensions, by find-
ing a 2D representation in which vectors that were
close in the original space, are close, and vectors that
were distant are further away.
Figure 3 shows the result of the t-SNE technique
to visualise the 100 dimension vectors into 2D. One
can see in the image that, how we would expect, vec-
tors about the same topic are loosely clustered to-
gether. This is probably because conversations about
the same topics often use the same “topic-specific”
words, thus making the final conversation vectors
similar. The four topic categories “School”, “Work”,
“Relationship” and “Tourism” are roughly clustered
in the four quadrants of the graph, while the ”ordi-
nary life” (blue) conversations are much more spread
across the entire graph, with a noticeable concentra-
tion in the centre-right of the graph. This is likely
due to the fact that conversations labelled as “Ordi-
nary Life” are much more varied, and lack a “topic-
specific” vocabulary if compared to conversation of
the other, more specific topics.
Context Vector Changes during a Conversation.
This experiment investigates the way a conversation
vector changes in the context space during a conver-
sation, according to the input given. The average co-
ordinates of the conversation of each topic are calcu-
lated, to better visualise the position of a vector in
respect to the clusters of each topic. A conversation is
processed by the model, and after every sentence, the
context vector is mapped to the 2D representation of
the context space. Doing so one can track the context
vector throughout a conversation to see how different
inputs affect the position of the context vector in the
context space.
Figure 4 shows the example of a conversation.
One can notice how vague and non-specific sentences
tend to push the context vector closer to the centre of
the graph, e.g. the last sentence “I hope so.” is a good
example of this. Also in the example, we can notice
how naming a nationality, i.e. “Chinese” in sentence
4, pushes the vector towards the bottom left corner
of the graph, close to the average coordinate of the
Tourism topic. This effect will occur most of the time
when the input is a city or a country name.
In order to asses the statistical significance of the
aforementioned observations, an additional experi-
ment is performed. The conversation vectors of 150
different conversations, randomly selected from the
entire dataset, are mapped in the context vector space.
Then, the same input sentence is given to all of the
conversations. To establish the effect that the last in-
put had on the context vector, the distance from the
centroid of the different topics is calculated both be-
fore and after the last input is given. Doing so we can
calculate the distance reduction that the last input sen-
Exploring the Context of Recurrent Neural Network based Conversational Agents
353
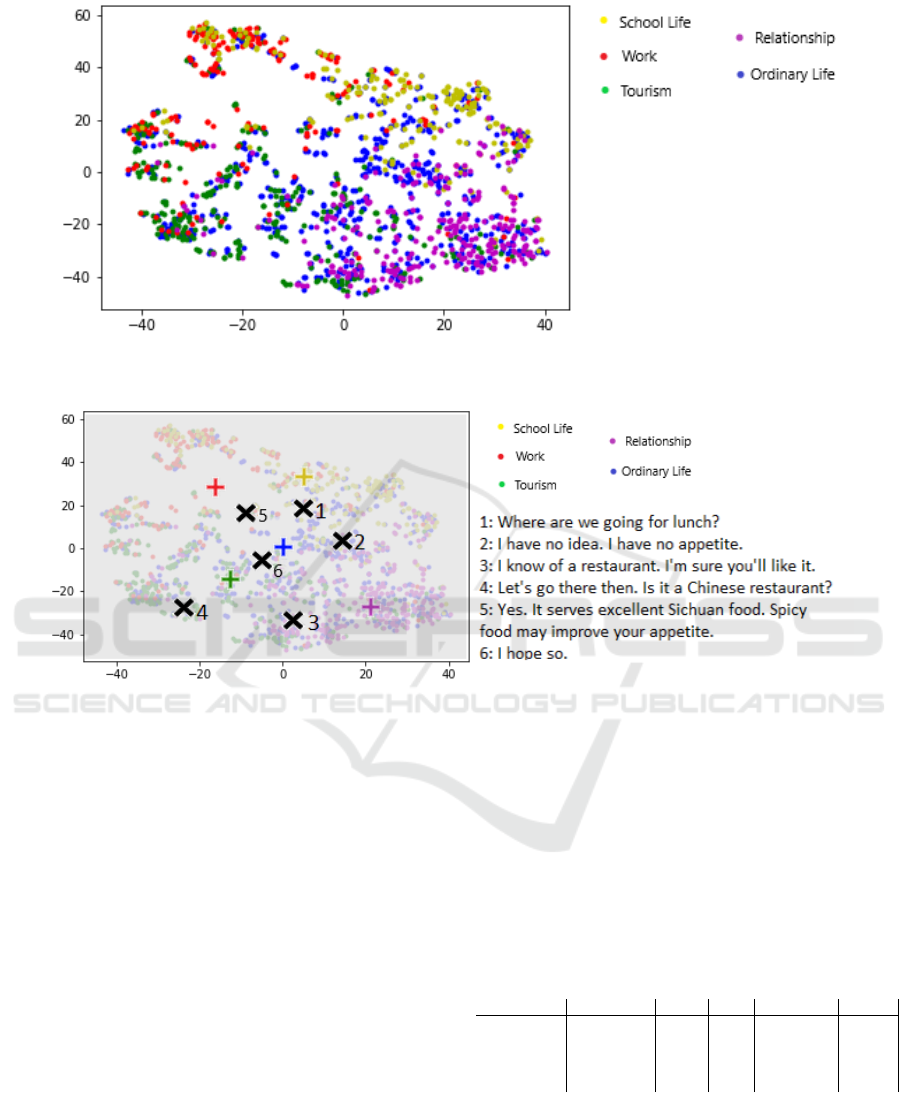
Figure 3: 2D visualisation of conversation encodings in the context space. Colours represent conversations about different
topics.
Figure 4: The black X represents the context vector after every sentence. The coloured + represent the average coordinate of
every topic.
tence generated from all of the topic centroids. Fig-
ure 5a illustrates how much the distance of the context
vectors of the conversations from all 5 the topic aver-
age coordinates, is reduced, after receiving as input
the sentence “I don’t know”. Because the sentence
is general and vague, we expect to see the distance
to the “ordinary life” average coordinate decreasing
more compared to the distance from the average co-
ordinates of other topics.
One can clearly see how in average the context
vector moves significantly closer to the “Ordinary
Life” topic (moving in average 13.5 units closer),
compared to all others (with average ranging from -
4.5 to 3). The same test is performed with the sen-
tence “Did you do book the flight to China for this
summer? I already reserved the hotel”. As expected,
figure 5b shows a much stronger average decreased
distance from the topic “Tourism” (having a mean
distance reduction of 17.1) compared to other topics
(with a mean ranging from -4.4 and 3.6), likely be-
cause of the intense use of tourism-related words.
In order to ensure that the difference shown in
the box-plots are indeed of statistical significance, a
Wilcoxon test is performed. The Wilcoxon test was
chosen because being a non-parametric test, it does
not assume any specific distribution of the data. Table
6 shows the results of the tests.
Table 6: Table showing the p-value from the Wilcoxon test,
on the distance reduction from the 5 topic centroids, after
the input of the sentence “I don’t know” in the top triangle,
and after the input of the tourism related sentence in the
lower triangle.
Ordinary Life School Work Relationship Tourism
Ordinary Life 1 0.009 0.007 0.03 0.001
School 0.17 1 0.39 0.18 0.63
Work 0.71 0.19 1 0.44 0.27
Relationship 0.51 0.26 0.37 1 0.09
Tourism 0.01 0.005 0.02 0.009 1
In the top triangle of table 6 it can be noticed that
the p-value for all pairs that include the “Ordinary
Life” topic are below 0.05, and therefore are signif-
icantly different, contrary to all other pairs, which are
not significant (the p-value is above 0.05). Similarly
lower triangle the p-value for all the pairs involving
the “Tourism” topic are significant, while all other
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
354

Figure 5: The Boxplot shows the distance reduction of the conversations vectors from the centroids of the 5 topics, after the
input “I don’t know” (in boxplot a) and the tourism related sentence(in boxplot b).
pairs are not.
The results of this experiment suggest that “topic-
specific” words will strongly influence the position of
the context representation in the context latent space.
5 CONCLUSION & FUTURE
WORK
This paper explored the application of a Hierarchical
Encoder-Decoder architecture for the task of a Dia-
logue System. The model attempts to overcome the
limitation that the basic Encoder-Decoder model has:
the inability of extracting and using context informa-
tion in the generation of a response. The model that
performed the best in the human evaluation experi-
ments is the Encoder-Decoder that uses a separately
trained word2vec model to transform the words in
vectors.
The reason why Encoder-Decoder outperformed
the other models in the experiments, is because it
learned to generate simpler and vaguer answers that,
due to their simplicity, are more likely to appear as a
valid response to the input. The HRED model is still
able to extract some contextual information, includ-
ing the most common words used in all the topics,
as demonstrated in experiments 3 and 4. However,
it seems that HRED has difficulty learning how to
apply such context information to generate meaning-
ful and coherent sentences, resulting in a percentage
of grammatically correct sentences generated below
40%, against almost 60% for the Encoder-Decoder.
Even though HRED was not able to improve the
quality of the outputs, it was capable of using the
context extracted from previous sentences in the gen-
eration of the output, resulting in increased usage
of words associated with other words previously ap-
peared in the conversation. HRED has been shown to
be able to generate a context space with some level of
structure, in which conversations about similar topics
are indeed close together. The result of experiment 4
suggests that this effect is probably caused by the fact
that conversations labelled with the same topic often
use similar words.
Future work will study how a significant increase
in the depth of the HRED modules would affect the
performance of the model, and what the effect of a
much bigger dataset would be on the final result. Ad-
ditionally, we are planning to explore the application
of the architecture to different tasks, as HRED could
in principle be applied to any sequence-generating
tasks that exhibit a hierarchical structure. In particu-
lar, it would be interesting to experiment with hierar-
chical structures composed by more than 2 levels, by
adding one additional context module for every addi-
tional level of the hierarchy.
REFERENCES
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Collobert, R. and Weston, J. (2008). A unified architec-
ture for natural language processing: Deep neural net-
works with multitask learning. In Proceedings of the
25th international conference on Machine learning,
pages 160–167. ACM.
Li, Y., Su, H., Shen, X., Li, W., Cao, Z., and Niu, S. (2017).
Dailydialog: A manually labelled multi-turn dialogue
dataset. arXiv preprint arXiv:1710.03957.
Maaten, L. v. d. and Hinton, G. (2008). Visualizing data
using t-sne. Journal of machine learning research,
9(Nov):2579–2605.
Manning, C. D., Manning, C. D., and Sch
¨
utze, H. (1999).
Foundations of statistical natural language process-
ing. MIT press.
Exploring the Context of Recurrent Neural Network based Conversational Agents
355

Mikolov, T., Chen, K., Corrado, G., and Dean, J. (2013a).
Efficient estimation of word representations in vector
space. arXiv preprint arXiv:1301.3781.
Mikolov, T., Sutskever, I., Chen, K., Corrado, G. S., and
Dean, J. (2013b). Distributed representations of words
and phrases and their compositionality. In Advances in
neural information processing systems, pages 3111–
3119.
Serban, I. V., Sordoni, A., Bengio, Y., Courville, A. C.,
and Pineau, J. (2016). Building end-to-end dialogue
systems using generative hierarchical neural network
models. In AAAI, volume 16, pages 3776–3784.
Serban, I. V., Sordoni, A., Lowe, R., Charlin, L., Pineau, J.,
Courville, A. C., and Bengio, Y. (2017). A hierarchi-
cal latent variable encoder-decoder model for generat-
ing dialogues. In AAAI, pages 3295–3301.
Sordoni, A., Bengio, Y., Vahabi, H., Lioma, C., Grue Si-
monsen, J., and Nie, J.-Y. (2015). A hierarchical re-
current encoder-decoder for generative context-aware
query suggestion. In Proceedings of the 24th ACM In-
ternational on Conference on Information and Knowl-
edge Management, pages 553–562. ACM.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
356
