
Detection of Control Points for UAV-Multispectral Sensed Data
Registration through the Combining of Feature Descriptors
Jocival Dantas Dias Junior, Andr
´
e Ricardo Backes and Maur
´
ıcio Cunha Escarpinati
Faculty of Computing, Federal University of Uberl
ˆ
andia, Uberl
ˆ
andia/MG, Brazil
Keywords:
Image Registration, Unmanned Aerial Vehicle, Multispectral Image, Feature Descriptors.
Abstract:
The popularization of the Unmanned Aerial Vehicle (UAV) and the development of new sensors has enabled
the acquisition and use of multispectral and hyperspectral images in precision agriculture. However, perfor-
ming the image registration process is a complex task due to the lack of image characteristics among the
various spectra and the distortions created by the use of the UAV during the acquisition process. Therefore,
the objective of this work is to evaluate different techniques for obtaining control points in multispectral ima-
ges of soybean plantations obtained by UAVs and to investigate if combining features obtained by different
techniques generates better results than when used individually. In this work Were evaluated 3 different fea-
ture detection algorithms (KAZE, MEF and BRISK) and their combinations. Results shown that the KAZE
technique, achieve better results.
1 INTRODUCTION
It is becoming increasingly more common to see ima-
ging technologies used to aid agriculture in terms of
providing precision based tasks, either to estimating
crop growth or when identifying characteristics of
agronomic interest (Sankaran et al., 2015). In this sce-
nario, the use of unmanned aerial vehicles (UAVs) has
gained more and more space due to the reduction of
operational costs regarding the use of such technology
(Zecha et al., 2013). According to the latest economic
report by the Association of Unmanned Aerial Vehi-
cles International, precision agriculture occupies the
largest portion of the potential worldwide market for
UAVs. (AUVSI, 2013).
Sensors represent a fundamental part of the ima-
ging process, a variety of sensors are being used to
scan plants for health problems, record growth rates
and hydration, and locate disease outbreaks. The first
UAVs used regular comercial cameras that operated
in the red, green and blue bands (RGB) and / or in re-
gions near the infrared (Hunt et al., 2010). The newly
developed sensors offered the UAVs the possibility
of obtaining multispectral and hyperspectral images
(Berni et al., 2009).
However, despite the growing use of UAVs to
obtain low and medium altitude images (100 to 400
m), the techniques of image processing used requires
specialized software. The reason for this is that con-
ventional methods applied to remote sensing image
processing are not applied to images obtained by UAV
as these methods have been developed to perform data
processing on more stable images with a much larger
spatial extent than the images obtained by UAVs (So-
ares et al., 2018).
Using UAVs for image acquisition in precision
agriculture requires hundreds and in some cases thou-
sands of overlapping images to cover an area. After
acquiring aerial images, it is necessary to perform the
registration process of the acquired images, in order
to extract agronomic characteristics. In RGB ima-
ges this process presents some difficulties that are ea-
sily identified and resolved, such as changes in lig-
hting, rotations and changes in scale from unforeseen
events along the UAV path. However, in addition to
the previously mentioned problems for RGB images,
we have that most multispectral cameras use different
physical sensors to obtain different spectra, which
causes a spatial misalignment between the spectra due
to their physical displacement. The variation of the
analyzed spectrum also leads to a loss of characteris-
tics between the bands which hinders the process of
detection of common characteristics between bands.
According to (Banerjee et al., 2018) the registra-
tion of two channels is achieved by inferring the ne-
cessary transformations from a set of control-point
correspondences that pair identical points in the scene
on each of the two images. In general, the greater the
444
Dias Junior, J., Backes, A. and Escarpinati, M.
Detection of Control Points for UAV-Multispectral Sensed Data Registration through the Combining of Feature Descriptors.
DOI: 10.5220/0007580204440451
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 444-451
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

number of identified points between the images, the
better the alignment of the channels. The traditional
approach for multispectral image registration is to de-
signate one channel as the target channel and register
all other image channels to the target. There is cur-
rently no comparative assessment of the best possible
way to perform such a registering procedure.
A framework for the registration of multispectral
images in spectral complex environments within the
temporal and spectral order is proposed in (Banerjee
et al., 2018). The descriptors Harris-Stephens Featu-
res (HSF), Min Eigen Features (MEF), Scale Invari-
ant Feature Transformation (SIFT), Speeded-Up Ro-
bust Features (SURF), Binary Robust Invariant Scala-
ble Keypoints (BRISK) and Features from Accelera-
ted Segment Test (FAST) were evaluated for this pro-
blem. The registration of these images in the spectral
order obtained a superior result to the temporal re-
gistration, where the best result was obtained by the
SURF method. However, the authors state that the use
of other descriptors can significantly improve results.
In (Yasir, 2018), an automatic framework was pro-
posed for the registration of multispectral images that
define the target channel based on the assumptions
that a minimum number of control-points correspon-
dences between two channels is needed to ensure low-
error registration, and a greater number of such cor-
respondences generally results in higher registration
performance. Basically, this work consists of analy-
zing all spectra in pairs and identifying the best way
to perform the registration so that the steps for the re-
gistration of all bands have on average the largest set
of control points possible.
In (Junior et al., 2018) the authors performed a
comparative analysis between the main descriptors of
local characteristics in the context of multispectral re-
gistration of images obtained by UAVs. In this work,
Harris-Stephens Features (HSF), Min Eigen Features
(MEF), KAZE Features (KAZE), Speeded-Up Ro-
bust Features (SURF), Binary Robust Invariant Sca-
lable Keypoints (BRISK) and Features from Accele-
rated Segment Test (FAST) were analyzed. The aut-
hors concluded that algorithms that use corner featu-
res provide better alignment of multispectral images
of crops, and MEF was considered the best algorithm
for this process.
In (Faria, 2018) a combination approach of diffe-
rent descriptors is proposed for improving the classi-
fication of the interesting cells. Results showed that
the union of different features descriptors generates a
better classification of cells than the individual appli-
cation of the same ones.
In this paper we propose the aplication of the ap-
proach proposed by (Faria, 2018) for the registration
process of aerial images. Our objective is to investi-
gate if the union of descriptors can be used with the
framework proposed by (Yasir, 2018) in order to im-
prove multispectral image registration. To accomplish
this task we used the following set of descriptors: Bi-
nary Robust Invariant Scalable Keypoints (BRISK),
Min Eigen Features (MEF), Kaze Features (KAZE)
and a combination between MEF and BRISK, MEF
and KAZE, BRISK and KAZE, because, according
to (Junior et al., 2018), these algorithms obtained on
average a superior result in the registration of multis-
pectral crop images.
The authors of the present paper conducted ex-
periments on aerial images of soybean plantations.
These images were chosen due to their peculiar cha-
racteristics that hinder the registration process. Soy-
bean images have a very similar texture and do not
usually contain much information (e.g. roads, lines,
trees) that can be used as control points for later alig-
nment.
The remainder of this paper is organized as fol-
lows. In section 2, the authors describe the dataset
and the main concepts used for the development of
this work. Section 3 presents the experiments and re-
sults obtained. Section 4 presents conclusions, limi-
tations and future work.
2 METHODS
In this section, the authors of the present paper dis-
cuss the datasets used in this work and the characte-
ristics observed during the acquisition of these ima-
ges. A description of the techniques of extraction and
detection of features is carried out. Finally, a brief ex-
planation is presented of the framework used to find
the best way to register each dataset.
2.1 Dataset
Three datasets were used, in all cases the data-
sets are from soybean plantations with a size of
1280 × 960, a resolution of 96 dpi and average 75%
overlap between the images. The channels pre-
sent in the datasets are, respectively, blue, green,
red, near-IR (NIR) and red-edge (REDEG). The da-
tasets were obtained in different soybean plantati-
ons located at the following decimal coordinates (-
20.379918, -46.242159), (-20.448603, -46.308684)
and (-18.730114, -48.772294) respectively. Images
from each dataset were obtained on a single flight wit-
hout any kind of pre-processing. The images were
obtained by a MicaSense Red-Edge (see Figure 1)
(MicaSense Inc. Seattle, WA, USA) camera coupled
Detection of Control Points for UAV-Multispectral Sensed Data Registration through the Combining of Feature Descriptors
445

in a Micro UAV SX2 (see Figure 2) (Senxis Innova-
tions in Drone Ltda, Uberl
ˆ
andia, MG, Brazil) at an
average height of 100 meters. The datasets contains
respectively 565 (113 scenes and 5 channels), 670
(134 scenes and 5 channels) and 200 (40 scenes and 5
channels) images. Figure 3 shows an example image
scene containing all channels obtained by the Red-
Edge MicaSense camera coupled to the Micro UAV
SX2.
Figure 1: MicaSense Red-Edge camera by MicaSense.
Figure 2: Micro UAV SX2 by Sensix.
Figure 3: Example image scene containing all channels
(Blue, Green, Red, near-IR, red-edge respectively) obtained
by the Red-Edge MicaSense camera.
2.2 Image Registration
According to (Zitov and Flusser, 2003) image regis-
tration can be defined as a process that overlaps two or
more images from various imaging devices or sensors
taken at different times and angles, to geometrically
align the images for analysis.
In this section, the authors present a review of the
main concepts related to the work developed in this
paper.
2.2.1 Feature Descriptors
Features, in the context of image registration, can be
defined as a pattern that occurs in one location of the
image and differs from its closest neighbors. Usually
this pattern is associated with a sudden change in one
or more properties of an image (e.g., texture, color or
intensity). These features may or may not be loca-
ted at the same location of the change and are usually
small areas of the image, corners or points. Descrip-
tors are obtained by performing some type of proces-
sing on the region where a feature is present (Kumar,
2014) (Tuytelaars and Mikolajczyk, 2008).
Several techniques for obtaining features descrip-
tors were proposed. In this work, as previously
described, the following techniques were analyzed:
Min Eigen Features (MEF) (Shi and Tomasi, 1994),
Kaze Features (Alcantarilla et al., 2012), Binary
Robust Invariant Scalable Keypoints (BRISK) (Leu-
tenegger et al., 2011), along with the combination of
the BRISK and MEF, KAZE and MEF, BRISK and
KAZE techniques. In the following, a brief descrip-
tion of these techniques is provided.
Min Eigen Features are obtained by using the Shi-
Tomasi Corner Detector algorithm. This algorithm
was proposed by (Shi and Tomasi, 1994) and is based
on the Harris Corner Detector (Harris and Stephens,
1988) algorithm with a small change in the selection
criterion. The change in the selection criterion occur-
red on the fact that while in the Harris Corner Detec-
tor, the eigenvalues are passed to a function that re-
turns the score for the determination as to whether the
analyzed pixel is or not a corner, in the algorithm of
Shi-Tomasi that function has been removed and only
the eigenvalues are considered. As discussed in (Shi
and Tomasi, 1994) this change proved to be experi-
mentally superior to the selection criterion proposed
in the Harris Corner Detector algorithm. In addition
to the best selection method, this algorithm is also in-
variant to illumination, scale and rotation changes.
The Kaze algorithm was proposed by (Alcantarilla
et al., 2012) for the purpose of detecting 2D featu-
res in a nonlinear scale space to obtain greater accu-
racy of localization and distinctiveness. The Gaussian
blurring method used to generate the space scale in
other algorithms does not maintain the natural edges
of the analyzed image and also the noise is smoothed
at all scaling levels. In order to solve this problem,
the KAZE algorithm uses non-linear diffusion filte-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
446

ring in conjunction with the Additive Operator Split-
ting (AOS) (Andersson and Marquez, 2016) method.
This algorithm is also invariant to illumination, scale
and rotation changes.
The Binary Robust Invariant Scalable Keypoints
(BRISK) was proposed by (Leutenegger et al., 2011)
in order to be an algorithm with a high performance,
however, with a drastic reduction of computatio-
nal cost when compared to algorithms like SIFT or
SURF. To obtain the localization of characteristics,
the BRISK algorithm uses the AGAST Corner Detec-
tor (Mair et al., 2010) technique, which holds a per-
formance improvement over the FAST algorithm. To
deal with scale changes, the BRISK algorithm finds
the points of interest within a space of scales, ap-
plying the technique of non-maximum suppression
(NMS) and by performing an interpolation between
all the scales. The BRISK algorithm is invariant to
scale and rotation changes.
The combination between techniques is accom-
plished by extracting all the features of both ima-
ges with the two techniques to be combined. Sub-
sequently, the feature vectors are vertically concate-
nated forming only one vector. Following this, the
removal of duplicate features is performed.
2.3 Registration Framework
The authors here used the data-driven framework for
multispectral image registration proposed by (Yasir,
2018), and summarized in Figure 4. Two chan-
ges were made in step 2 of this framework. The
first change is due to the fact that this work aims
at the analysis of the image registry using only one
technique (be it single or a combination of techni-
ques). Therefore, after the extraction of the control
points, a graph will be constructed for each techni-
que described above. The second is the removal of
equal control points and the removal of outlier points
via random sample consensus (RANSAC) algorithm
(Fischler and Bolles, 1981).
This framework consists of the construction of a
complete graph where the nodes of the graph are the
channels to be registered and the weights the quan-
tity control points obtained by the algorithms between
those channels (see Figure 5). Then, using the Krus-
kal (Kruskal, 1956) algorithm, a Maximum Spanning
Tree is constructed. To find the channel to be used
as the target for the other alignments, the weights
between the nodes are replaced by 1 and the Floyd-
Warshall all-pairs-shortest-path (Floyd, 1962) algo-
rithm is used. The node with the smallest sum of dis-
tances from itself to all the other nodes is selected as
the target channel for the registration scheme.
Figure 4: Registration Scheme proposed by (Yasir, 2018).
Figure 5: Example of a complete graph generated by the
framework.
With the aim to perform the comparison between
techniques, the authors use the number of distinct
control points found after the removal of the outlier.
The number of control points to be detected by each
technique are not limited.
An example of a result of the framework described
above is demonstrated in figure 6.
Detection of Control Points for UAV-Multispectral Sensed Data Registration through the Combining of Feature Descriptors
447

Figure 6: Example of output from Registration Scheme.
3 EXPERIMENTS
Each technique, or combining, (MEF, BRISK, KAZE,
MEF and BRISK, MEF and KAZE, BRISK and
KAZE) was applied individually over the datasets
and the results obtained are presented in this section.
As previously described, in this work the techniques
are being evaluated by the number of control points
found.
3.1 Soybean Dataset 01
Soybean Dataset 01 consists of 113 scenes in five dis-
tinct channels (blue, green, red, near-IR and red-edge
) resulting in a total of 565 images. Some images of
this dataset have few elements that favor the process
of alignment between the bands (e.g. plantations li-
nes and roads), it can be seen in the figure 7. For
this dataset the technique that generated the highest
average number of control points was Kaze Features
(see figure 8). This technique recognized on average
459 points on each image. The schema for the regi-
stry after all steps of the framework is shown in Fi-
gure 9. As previously described, this framework ge-
nerates a scheme for registration between the chan-
nels of an image, in order that the greatest number
of control points between the channels are obtained.
This scheme also demonstrates that the red and near-
IR channels have to be first registered in the blue and
red-edge channels respectively, and then later recor-
ded in the green channel.
3.2 Soybean Dataset 02
Soybean Dataset 02 consists of 134 scenes in five dis-
tinct channels (blue, green, red, near-IR, red-edge)
resulting in a total of 670 images. Differently from
dataset 01, the images present in this dataset present
Figure 7: Example image of Soybean Dataset 01.
Figure 8: Average points per image in dataset 01.
Figure 9: Dataset 01 registration scheme using the KAZE
technique.
several elements that favor the alignment process be-
tween the bands (eg planting lines, trees, roads, plan-
ting failures), an image exemplifying these elements
can be seen in the figure 10. Due to these characteris-
tics, a higher number of control points was obtained
when compared to the other datasets. For this dataset
the best from among the techniques, when evaluating
the average number of control points, was obtained
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
448
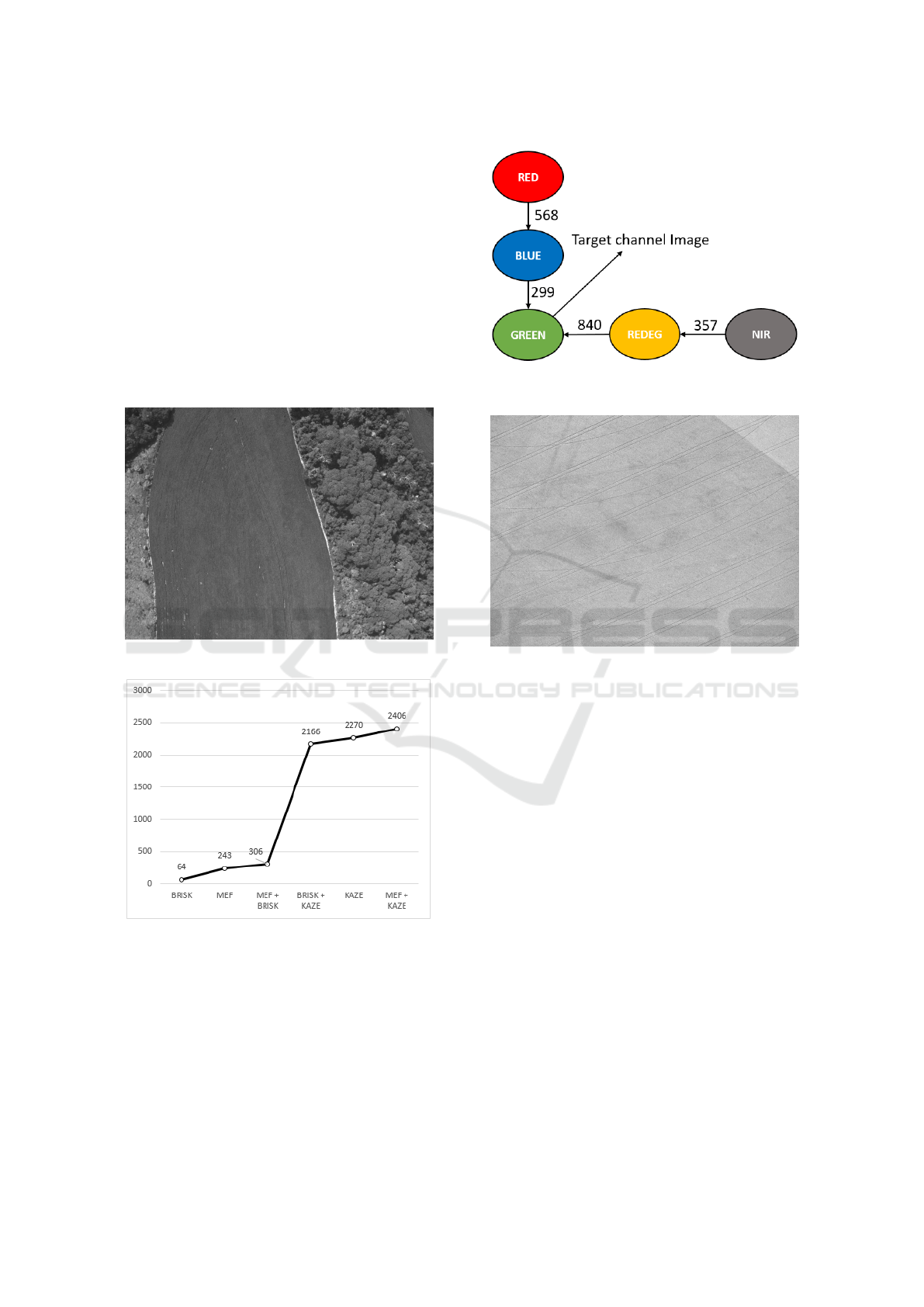
throught the combining of those features obtained by
the KAZE technique with those from the MEF techni-
que (see figure 11). A total of 2406 control points
were recognized for each image. The large number
of control points available in the dataset images allo-
wed algorithms such as MEF to identify features not
detected by the KAZE technique. For this reason, the
combination of features obtained by MEF and KAZE
achieved a superior result. The schema for the regis-
tration after all framework steps is shown in Figure
12. This scheme demonstrates, as in Dataset 01, that
red and near-IR channels have to be first registered in
the blue and red-edge channels respectively and sub-
sequently registered in the green channel.
Figure 10: Example image of Soybean Dataset 02.
Figure 11: Average points per image in dataset 02.
3.3 Soybean Dataset 03
Soybean Dataset 03 consists of 40 scenes in five dis-
tinct channels (blue, green, red, near-IR, red-edge) re-
sulting in a total of 200 images. Dataset 03 presents
only a few planting lines to be used by the algorithms
as control points. An image exemplifying the data-
set 03 is shown in the figure 13. For this dataset we
have the technique that generated the highest average
Figure 12: Dataset 02 registration scheme using the
MEF+KAZE technique.
Figure 13: Example image of Soybean Dataset 03.
number of control points as being Kaze Features (see
figure 14). This technique recognized on average 400
points on each image. The schema for the registry
after the conclusion of all steps in the framework is
shown in Figure 15. This structure presents a change
in the resulting scheme for datasets 01 and 02, unlike
the previous schemes, the near-IR channel is no lon-
ger be registered in the red-edge channel. All chan-
nels, with the exception of red, which continues to be
registered in blue, is recorded directly on the target
channel. For this dataset, just as with the prior sets,
the target channel is green.
4 CONCLUSION
In this work was explored the application of different
techniques for the registration of multispectral ima-
ges obtained by UAVs in soybean plantations. The
authors also evaluated how the combination of featu-
res obtained by different descriptors impacts on the
number of control points obtained.
As seen in the experiments section, on average,
the KAZE technique provided more control points for
Detection of Control Points for UAV-Multispectral Sensed Data Registration through the Combining of Feature Descriptors
449

Figure 14: Average points per image in dataset 03.
Figure 15: Dataset 03 registration scheme using the KAZE
technique.
the registration process than other techniques. In Da-
taset 02, the combination of the features obtained by
the MEF and KAZE techniques achieved the greatest
number of control points among the others techni-
ques. However, throught an analysis of the difference
obtained between the results, when compared to ot-
her factors (e.g. complexity to obtain features of two
different techniques), one concludes that the KAZE
technique was superior to other techniques evaluated
in this paper.
One of the factors that led to the KAZE techni-
que to obtain a large number of control points than
MEF and BRISK techniques is mainly due to how the
KAZE technique performs the scale invariance pro-
cess. The KAZE algorithm detects features in a non-
linear scale space by means of nonlinear diffusion fil-
tering. Thus, the KAZE algorithm makes blurring lo-
cally adaptive to the image data, reducing noise but
retaining object boundaries, while obtaining superior
localization accuracy and distinctiveness (Alcantarilla
et al., 2012). This is quite different to BRISK that
uses Gaussian blurring, which, according to (Alcan-
tarilla et al., 2012), does not respect the natural boun-
daries of objects and smooths to the same degree both
the details and noise, reducing localization accuracy
and distinctiveness. The MEF algorithm, although
invariant to scale, presents a considerable degrada-
tion in the repeatability of the features when the scale
changes, as demonstrated by (Schmid et al., 2000).
The scale invariance is extremely important when we
are evaluating images obtained by UAVs since, as pre-
viously demonstrated, there are several factors (e.g.
wind speed, wind direction) that influence the path of
the UAV leading to distortions of scale and rotation.
Noteworthy is that althought dataset 2 presents a
small modification, the scheme for channel registra-
tion is very similar among all datasets. The green
channel is always used as the final target for the other
channels, where red and near-IR are first recorded in
the blue and red-edge channels respectively. Through
a comparison of the registration scheme proposed by
(Banerjee et al., 2018), the spectral order (blue, green,
red, red-edge, NIR) was verified as not being the best
in any of the datasets evaluated.
The main limitation of this work is to have evalu-
ated only the number of control points obtained be-
tween channels. The quality of the alignment was
not evaluated in this work due to the lack of previ-
ously aligned datasets containing multispectral ima-
ges obtained by UAVs at low/medium altitude (100 to
400m). Satellite images cannot be used for this pur-
pose due to particular characteristics, such as higher
spatial resolution and greater stability. The datasets
presented in this work are manually aligned for ana-
lysis purposes.
Future work proposals are based on the evaluation
of bioinspired algorithms (e.g. Genetic Algorithms,
Swarm Intelligence, etc.) to perform the alignment of
multispectral crop images. Also, as previously descri-
bed, another study proposal that is under development
is the creation of an aligned dataset containing mul-
tispectral images obtained by UAVs to evaluate the
algorithms.
ACKNOWLEDGEMENTS
The authors gratefully acknowledges CAPES (Coor-
dination for the Improvement of Higher Education
Personnel), CNPq (National Council for Scienti-
fic and Technological Development, Brazil) (Grant
#302416/2015-3), FAPEMIG (Foundation to the Sup-
port of Research in Minas Gerais (Grant #APQ-
03437-15) for the financial support and the company
Sensix (http://sensix.com.br) for providing the images
used in the tests.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
450

REFERENCES
Alcantarilla, P. F., Bartoli, A., and Davison, A. J. (2012).
Kaze features. In Fitzgibbon, A., Lazebnik, S., Pe-
rona, P., Sato, Y., and Schmid, C., editors, Computer
Vision – ECCV 2012, pages 214–227, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Andersson, O. and Marquez, S. R. (2016). A comparison
of object detection algorithms using unmanipulated
testing images: Comparing sift, kaze, akaze and orb.
Master’s thesis.
AUVSI (2013). The economic impact of unmanned aircraft
systems integration in the united states march. Techni-
cal report, The Association for Unmanned Vehicle Sy-
stems International.
Banerjee, B. P., Raval, S. A., and Cullen, P. J. (2018). Alig-
nment of uav-hyperspectral bands using keypoint des-
criptors in a spectrally complex environment. Remote
Sensing Letters, 9(6):524–533.
Berni, J. A. J., Zarco-Tejada, P. J., Suarez, L., and Fere-
res, E. (2009). Thermal and narrowband multispectral
remote sensing for vegetation monitoring from an un-
manned aerial vehicle. IEEE Transactions on Geos-
cience and Remote Sensing, 47(3):722–738.
Faria, L. C., R. L. F. M. J. F. (2018). Cell classification using
handcrafted features and bag of visual words. In Pro-
ceedings of XIV Workshop de Vis
˜
ao Computacional.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Floyd, R. W. (1962). Algorithm 97: Shortest path. Com-
mun. ACM, 5(6):345–.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In In Proc. of Fourth Alvey Vision
Conference, pages 147–151.
Hunt, E. R., Hively, W. D., Fujikawa, S. J., Linden, D. S.,
Daughtry, C. S. T., and McCarty, G. W. (2010). Acqui-
sition of nir-green-blue digital photographs from un-
manned aircraft for crop monitoring. Remote Sensing,
2:290–305.
Junior, J. D. D., Backes, A. R., Abdala, D. D., and Es-
carpinati, M. C. (2018). Assessing the adequability
of image feature descriptors on registration of uav-
multispectral sensed data. In Proceedings of XIV
Workshop de Vis
˜
ao Computacional.
Kruskal, J. (1956). On the shortest spanning subtree of a
graph and the traveling salesman problem. In Pro-
ceedings of the American Mathematical Society, pa-
ges 48–50.
Kumar, R. S. M. (2014). A survey on image feature des-
criptors.
Leutenegger, S., Chli, M., and Siegwart, R. Y. (2011).
Brisk: Binary robust invariant scalable keypoints. In
2011 International Conference on Computer Vision,
pages 2548–2555.
Mair, E., Hager, G. D., Burschka, D., Suppa, M., and Hi-
rzinger, G. (2010). Adaptive and generic corner de-
tection based on the accelerated segment test. In Da-
niilidis, K., Maragos, P., and Paragios, N., editors,
Computer Vision – ECCV 2010, pages 183–196, Ber-
lin, Heidelberg. Springer Berlin Heidelberg.
Sankaran, S., Khot, L. R., Espinoza, C. Z., Jarolmasjed, S.,
Sathuvalli, V. R., Vandemark, G. J., Miklas, P. N., Car-
ter, A. H., Pumphrey, M. O., Knowles, N. R., and
Pavek, M. J. (2015). Low-altitude, high-resolution
aerial imaging systems for row and field crop phe-
notyping: A review. 70:112–123. Exported from
https://app.dimensions.ai on 2018/11/20.
Schmid, C., Mohr, R., and Bauckhage, C. (2000). Evalua-
tion of interest point detectors. International Journal
of Computer Vision, 37(2):151–172.
Shi, J. and Tomasi (1994). Good features to track. In 1994
Proceedings of IEEE Conference on Computer Vision
and Pattern Recognition, pages 593–600.
Soares, G., Abdala, D., and Escarpinati, M. (2018). Planta-
tion rows identification by means of image tiling and
hough transform. pages 453–459.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors: A survey. Found. Trends. Comput.
Graph. Vis., 3(3):177–280.
Yasir, R. (2018). Data driven multispectral image registra-
tion framework. Master’s thesis, University of Saska-
tchewan.
Zecha, C. W., Link, J., and Claupein, W. (2013). Mobile
sensor platforms: categorisation and research appli-
cations in precision farming. Journal of Sensors and
Sensor Systems, 2(1):51–72.
Zitov, B. and Flusser, J. (2003). Image registration methods:
a survey. Image and Vision Computing, 21(11):977 –
1000.
Detection of Control Points for UAV-Multispectral Sensed Data Registration through the Combining of Feature Descriptors
451
