
Natural Stereo Camera Array using Waterdrops
for Single Shot 3D Reconstruction
Akira Furukawa, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Gokiso, Showa, Nagoya, Japan
Keywords:
Natural Stereo Camera System, Water Drop Stereo, Camera Parameters By Optical Aberration.
Abstract:
In this paper, we propose a stereo 3D reconstruction from a single image including multiple water drops.
Water drops on a surface, e.g. camera lens, refract light rays and the refracted rays are roughly converged to
a point. This indicates that water drops can be regarded as approximately small lens. Therefore, sub-images
refracted by water drops can be regarded as images taken from different viewpoints. That is, virtual stereo
camera systems can be constructed from a single image by using these raindrop characteristics. In this paper,
we propose an efficient description of this virtual stereo camera system using water drops. Furthermore, we
propose methods for the estimation of the camera parameters and for the reconstruction of the scene. We
finally display several experimental results and discuss the validation of our proposed camera model from the
results.
1 INTRODUCTION
In field of computer vision, 3D reconstruction is
one the most traditional and important aspects, and
hence, various methods have been studied extensi-
vely(Newcombe et al., 2011; Klein and Murray, 2009;
Cheung et al., 2000; Posdamer and Altschuler, 1982;
Kolmogorov and Zabih, 2002). In general, 3D recon-
struction methods require two or more than two came-
ras since depth information is lost in a single image.
Therefore, multiple camera systems, known as stereo
camera systems, are used for 3D scene reconstructi-
ons in general.
However, the stereo camera system does not al-
ways require explicit multiple cameras because the
system just requires images that are taken from dif-
ferent viewpoints. Therefore, 3D reconstruction can
be achieved by using single camera if the camera can
take such images. The most representative 3D recon-
struction method that uses a single camera is Structure
from Motion (SfM)(Klein and Murray, 2009; New-
combe et al., 2011). In this method, a single camera
moves around the target object and takes several ima-
ges from different viewpoints. From these images,
the 3D shape of the target object can be reconstructed
by using ordinary stereo reconstruction techniques.
Although these methods are considerably convenient
since the method can be utilized by using only a sin-
gle camera, the method cannot be applied when the
target object is not rigid. This is because stereo cor-
respondences that are used for stereo reconstruction
may be changed when the target object is not rigid,
and thus, the stereo constraints for 3D reconstruction
are not satisfied in this case.
In order to avoid this problem, another approach
that uses a special lens, as shown in Fig.1(a) and
2(a), are proposed. In this approach, multiple images
that are taken from different viewpoints are virtually
obtained from a single image. These methods can be
classified into two techniques based on lens size and
lens position.
In the first technique, micro-lens array as shown
in Fig 1(a) is used(Levoy and Hanrahan, 1996; Chen
et al., 2014). The micro-lens array is equipped on the
image plane such as a CCD and it achieves special
image photography as shown in Fig. 1(b). This spe-
cial image includes multiple images taken from diffe-
rent viewpoints, and then, the image can be separated
into multiple images. Therefore, 3D scenes can be
reconstructed from the images by using an ordinary
technique. In general, cameras that are equipped with
micro-lens arrays are known as light-field cameras.
The second approach uses large-lens array as
shown in Fig 2(b). The array is placed in front of
the camera, and then, images that include multiple
sub-images from different viewpoints can be taken di-
rectly as shown in Fig.2(b). By using the sub-images
in the input image, 3D reconstruction can be achieved.
Furukawa, A., Sakaue, F. and Sato, J.
Natural Stereo Camera Array using Waterdrops for Single Shot 3D Reconstruction.
DOI: 10.5220/0007582609010907
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2019), pages 901-907
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
901
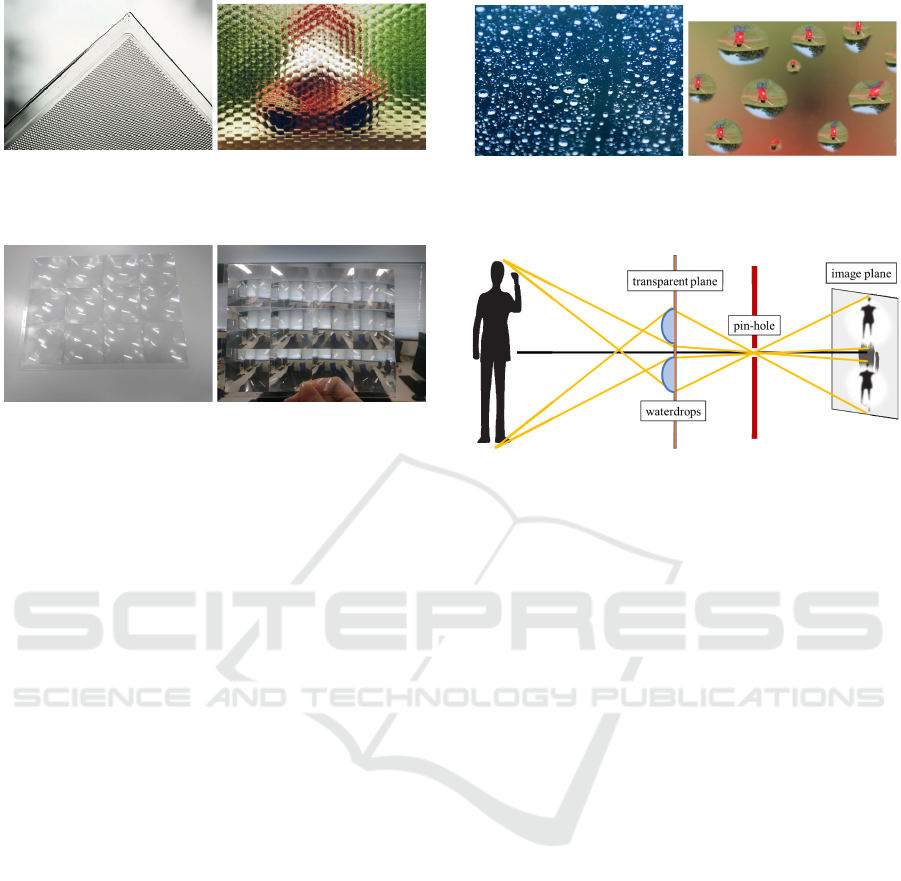
(a) micro-lens array (b) obtained image
Figure 1: Multiple image photography using micro-lens ar-
ray equipped on the image plane.
(a) lens array (b) obtained image
Figure 2: Multiple image photographing using lens array
placed in front of the main camera.
The approaches using special lens arrays achieve
stereo 3D reconstruction from single images. Howe-
ver, the special lens cannot be utilized always. There-
fore, the convenience of these methods may become
lesser than an ordinary stereo method using multi-
ple cameras. In order to overcome this problem,
several methods that use natural optical phenomena
have been proposed(Arvind V. Iyer, 2018; You et al.,
2016). In these methods, natural optical lenses such
as water drops as shown in Fig.3(a) are utilized as lens
arrays. When the water drops are placed in front of
the camera, the input image includes multiple sub-
images as shown in Fig.3(b). Therefore, 3D recon-
struction can be achieved from a single image using
natural objects alone.
Although these methods are significantly conve-
nient, they require large computational cost for 3D
reconstruction as the method has to compute com-
plicated optical refractions by water drops that have
complicated shapes. In this paper, we propose an ef-
ficient camera model for describing these complica-
ted optical phenomena. In this model, we focus not
on the shape of water drop, but rather on the optical
refraction by the water drop; moreover, we do not re-
construct the shape of the water drop explicitly. In our
model, the optical refraction is described using only a
few parameters. Therefore, the computational cost for
3D reconstruction can be drastically reduced. In ad-
dition, the robustness of the reconstruction becomes
higher as the constraint of the model is powerful. In
this paper, we explain this camera model and indicate
the calibration and 3D reconstruction method using
the model as well.
(a) water drops (b) obtained image
Figure 3: When a water drop is put on the lens, the water
drop can be regarded as natural lens array.
Figure 4: Overview of our proposed camera model.
2 WATER DROP CAMERA
MODEL
We first define a camera model that describes the
image projection from a 3D scene to the image plane
using water drops. Figure 4 shows the overview of our
camera model. As shown in this figure, we assume
that the main lens of the camera can be approximated
by a pinhole and water drops are placed on a trans-
parent plane set in front of the main camera. In this
case, input light rays are refracted by the water drops
at first. Thereafter, the rays pass through the pinhole
and are received by pixels on an image plane.
In general, a surface normal direction is required
to compute the refraction of light rays. Specifically,
explicit shape description and reconstruction is ne-
cessary for describing the behavior of the light rays
to the image plane. In addition, light ray refractions
by not only the water drops, but transparent planes
as well should be considered for describing accurate
light rays. When this description is used, the com-
putational cost becomes burdensome if a lot of water
drops are placed on the plane. Therefore, we propose
an efficient description model that focuses on optical
aberration by water drops.
When the water drop is an ideal optical lens, in-
put light rays are converged to a pinhole as shown
in Fig.5(a). However, the light rays are not conver-
ged into the point owing to inaccuracies such as com-
plicated shapes of the lens in general, as shown in
Fig.5(b). This phenomenon can be described by the
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
902
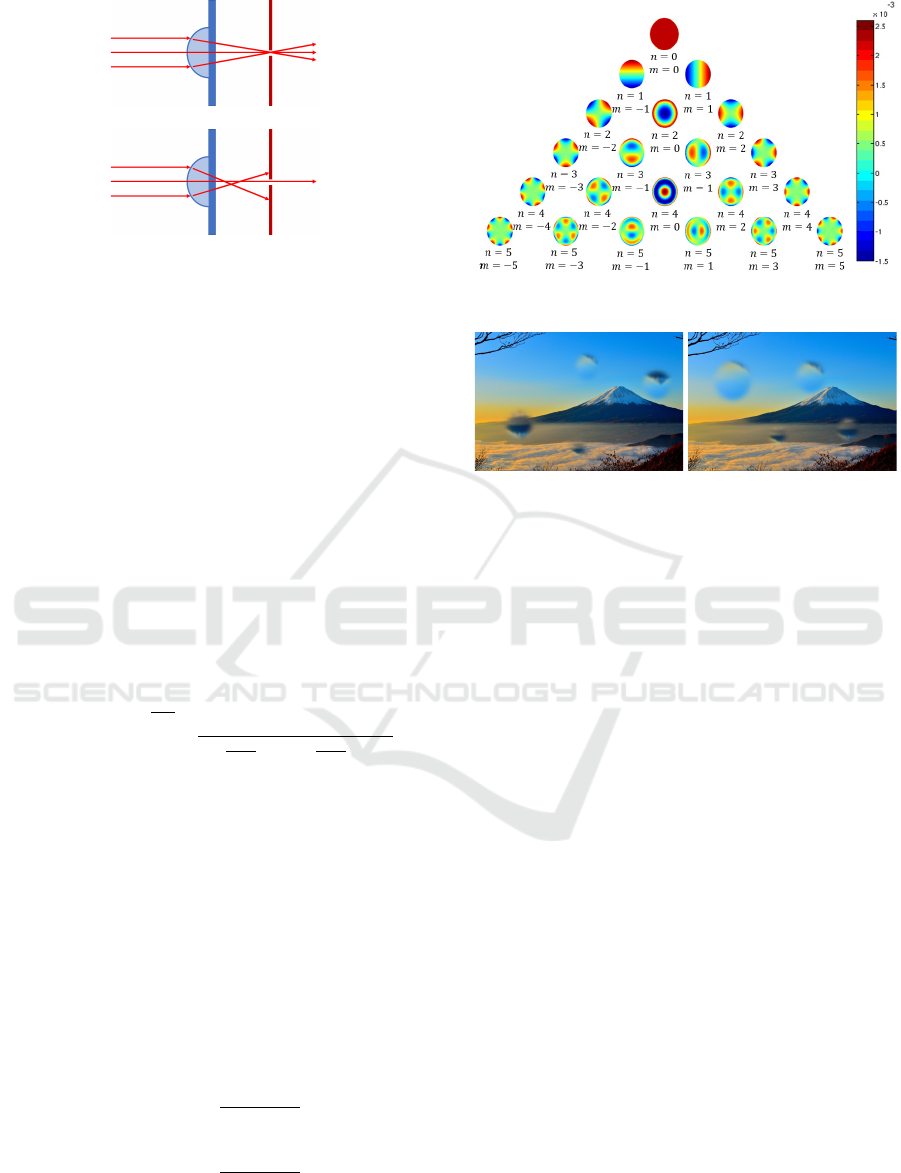
(a) ideal lens
(b) ordinary shape
Figure 5: Optical aberration caused by water drops. Fi-
gure(a) shows an ideal case where the light rays are conver-
ged to a point . Figure(b) shows an ordinary case where the
light rays are not converged to a point.
optical aberration model(Tyson, 2010; Geary, 1995;
Roddier, 2004) efficiently. In our case, water drops
can be regarded as incorrect optical lenses; thereafter
the behavior of the light rays can be described by the
optical aberration model efficiently.
For this objective, Zernike polynomial is generally
used as the model can describe the aberration effi-
ciently. In this model, optical aberration is represen-
ted using a few parameters. Therefore, we employ the
Zernike aberration model in our proposed method.
Here, we describe the details of the Zernike aber-
ration model. In this model, optical aberration is re-
presented by the linear combination of the Zernike ba-
ses and the bases are computed as follows:
Z
nm
(ρ, θ) =
n−m
2
∑
s=0
(−1)
s
(n − s)!ρ
n−2s
s!
n+m
2
− s
!
n−m
2
− s
!
!
cos
|
m
|
θ : m ≥ 0
sin
|
m
|
θ : m < 0
(1)
where ρ and θ give the log-polar coordinates repre-
sentation of the 2D image. Through this base, the op-
tical aberration W (X,Y ) at point (X,Y ) is represented
as follows:
W (X,Y ) =
k
∑
n=0
n
∑
m=−n
B
nm
Z
nm
(ρ, θ) (2)
where B
nm
is Zernike coefficient. ∇W can be compu-
ted by partial differentiation of W with respect to X
and Y as follows:
∇W =
∂W (X,Y )
∂X
∂W (X,Y )
∂Y
(3)
The ∇W represents the extent of the light rays re-
fraction by the water drops directly.
Figure 6: Zernike bases.
Figure 7: Examples of rendered images with different Zer-
nike coefficients.
Figure 6 shows Zernike bases and they correspond
to specific optical aberrations such as spherical aber-
rations. Coefficients of this equation represent the de-
gree of each aberration. In general, ordinary optical
aberration can be represented by the combination of a
few bases; thereafter, we can describe the behavior of
the light rays from water drops by using a few coeffi-
cients.
Figure 7 shows the examples of rendered ima-
ges by our proposed model. In these figures, diffe-
rent Zernike coefficients are used for rendering the
images. These figure show that the rendered images
change drastically by just changing the Zernike coef-
ficients.
3 CALIBRATION OF CAMERA
Next, we consider the calibration of our proposed ca-
mera model, i.e., the estimation of the Zernike coef-
ficients is discussed in this section. In general, a wa-
vefront sensor is utilized for measuring optical aber-
rations. The sensor is a type of light field camera and
it measures the behavior of the wave directly. Howe-
ver, this sensor cannot be used in our case because the
aberrated wave should be observed directly for mea-
suring the aberration. To be precise, the sensor should
be placed between the water drops and a main lens. It
is not realistic a set up. Therefore, we estimate the
coefficients by minimizing the image residual of ren-
Natural Stereo Camera Array using Waterdrops for Single Shot 3D Reconstruction
903

dered images.
In this estimation, it is assumed that the informa-
tion of the input scene such as scene shape and texture
information is known. In this case, the input image
can be virtually rendered again when Zernike coeffi-
cients B are provided. Let I
0
(B) denote the rendered
image by coefficients B and I denote an input image.
In this case, image residual R is computed as follows:
R = I − I
0
(B) (4)
When a parameter B is equivalent to the correct pa-
rameter
ˆ
B, the residual R should become small. The-
refore, the Zernike coefficient
ˆ
Bcan be estimated by
minimizing the residual R as follows:
ˆ
B = argmin
B
kRk
2
= argmin
B
kI − I
0
(B)k
2
(5)
Note that, in general, point light sources that emit
spherical waves or plane waves are used for estima-
ting the aberration of the lens. In this case, optical
aberration can be measured directly; thereafter, aber-
ration parameters can be easily estimated. In our met-
hod, we can estimate the aberrations under the light
source easily. In addition, our method can estimate
the coefficients even if general light rays are input to
the camera because our method focuses on the con-
sistency of the whole input image.
4 SCENE RECONSTRUCTION
Here, we explain the 3D scene reconstruction by
using a calibrated camera model. In an ordinary ste-
reo method, the correspondences of feature points
such as SIFT (Lowe, 1999) and SURF (Bay et al.,
2006) are used for the reconstruction. In this case,
the feature points are extracted from the input images
at first. Thereafter, correspondences are determined
from the feature points. Finally, these corresponden-
ces are reconstructed under epipolar constraints.
However, we cannot use the gold standard algo-
rithm in our camera model because images for each
camera, i.e., images by water drops do not have
enough resolution for extracting feature points. Fi-
gure 8 shows the example of an input image. In
this image, although a water drop provides images
taken from different viewpoints, the provided image
does not have enough resolution for extracting feature
points.
To overcome this problem, we do not focus on fe-
ature points, but rather on whole sub-images provided
by the water drop, similar to the calibration process.
In this method, whole input images are backprojected
to a 3D scene S and the scene is texture mapped by a
sub image. Next, the 3D scene is reprojected to our
Figure 8: Example of input image with water drops.
camera model. Here, if the 3D scene S corresponds
to a real scene, the reprojected image corresponds to
the input image as well. Therefore, the 3D scene can
be reconstructed by minimizing the difference of the
input image and reprojected image. That is to say, the
3D scene
ˆ
S can be estimated as follows:
ˆ
S = argmin
S
kI − P(T (I, S, B), S, B)k
2
(6)
where P and T represent the projection and backpro-
jection processes of the input image I with shape S
and camera parameters B, respectively.
In order to realize this estimation, the 3D scene S
should be represented by a few parameters. For ex-
ample, the Bezier curve is a representative parame-
tric shape model. In this model, curves in the scene
are determined by control points and the curves repre-
sent various 3D shapes by moving the control points.
When the Bezier curves are used for scene represen-
tation, the 3D scene S can be described as follows:
S(u, v) =
n
∑
i=0
n
∑
j=0
B
n
j
(u)B
n
j
(v)q
i j
0 ≤ u ≤ 1, 0 ≤ v ≤ 1 (7)
where q is the control point and B are Bernstein basis
functions. The function is computed as follows:
B
n
i
(u) =
n
C
i
(1 − u)
n−i
u
i
(8)
n
C
i
=
n!
i!(n − i)!
(9)
By using the Bezier curves, whole 3D scenes can
be represented and estimated by estimating the 3D po-
sition of the control points alone. For example, the
5-th order curve can be estimated by the estimation
of 36 control points. Especially, only 36 parameters
should be estimated when only the depth of the con-
trol points are changed. Figure 9 shows an example
of the 5-th order Bezier curve. The curve can be ea-
sily changed by changing the position of the control
points.
Note that the backprojection of an input image to
the 3D scene is not very complicated in our model.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
904
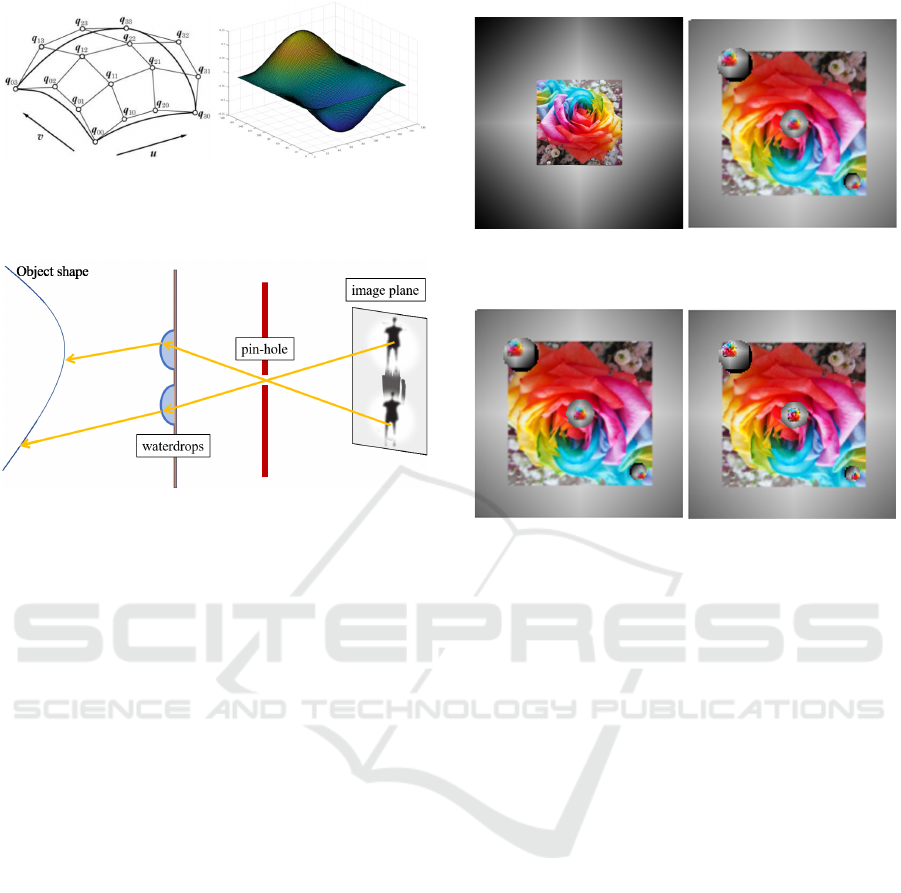
(a) control points (b) Bezier curves
Figure 9: Representation of control points and example of
Bezier curves.
Figure 10: Backprojection of an input image.
As described in the previous section, the main camera
of our camera model has a pin-hole, and only a sin-
gle light ray is received by each pixel. Therefore, the
light ray can be backtraced easily as shown in Fig.10.
In addition, since the optical aberration model is used
for the representation of light ray refractions, the re-
fraction of the traced light ray can be computed di-
rectly compared to ordinary light refraction models.
5 EXPERIMENTAL RESULTS
In this section, we present several experimental re-
sults by our proposed method. We first explain the
experimental environment. In all the experiments, a
simulation environment was used for obtaining accu-
rate ground truth. In the computer, an experimen-
tal environment was set up and several images were
taken by a virtual camera. In front of the camera,
a transparent plane was positioned and water drops
were placed on the plane. The shape of the each water
drop was different from each other. Therefore, light
ray inputs to the drops had different behaviors. In the
input image synthesis process, each light ray to the
image plane was traced based on not our proposed
model, but rather the physics rules for validating our
proposed model.
In the estimation process, the refractions by water
drops were represented by five Zernike coefficients.
In front of the camera, a planar surface was placed,
and several textures were mapped onto the plane. The
(a) Target image
(b) Input image
Figure 11: Target image and example of input image.
(a) input image
(b) calibrated result
Figure 12: Input image and camera calibration result by
using Zernike polynomials.
plane was taken by the camera. Figure 11 shows the
examples of input images and its target object. By
using the images, the camera parameters and 3D sce-
nes were estimated respectively.
We first show the camera parameters, i.e. Zernike
coefficients estimation results. As mentioned above,
the input images were synthesized based on physics
rules, and then, the validation of our camera model
was evaluated in this experiment.
We first extract the region of the water drop by
using Hough transformation roughly. After that, Zer-
nike coefficients were estimated for each detected wa-
ter drop respectively. In order to evaluate valida-
tion of our model, the target scene was projected to
the image plane by using estimated coefficients. Fi-
gure 12 shows an example of the pair of input image
and reprojected image using calibrated camera para-
meters. As shown in this figure, our camera model
can synthesize images similar to the input image alt-
hough they were based on different rules. The results
indicate that our proposed camera model can repre-
sent the refraction of light rays effectively. In addi-
tion, our proposed calibration method can estimate
camera parameters from ordinary input images.
We now present scene reconstruction results by
using the calibrated parameters. In this estimation,
only the depth of the target plane was estimated from
a single input image. In order to evaluate the vali-
Natural Stereo Camera Array using Waterdrops for Single Shot 3D Reconstruction
905
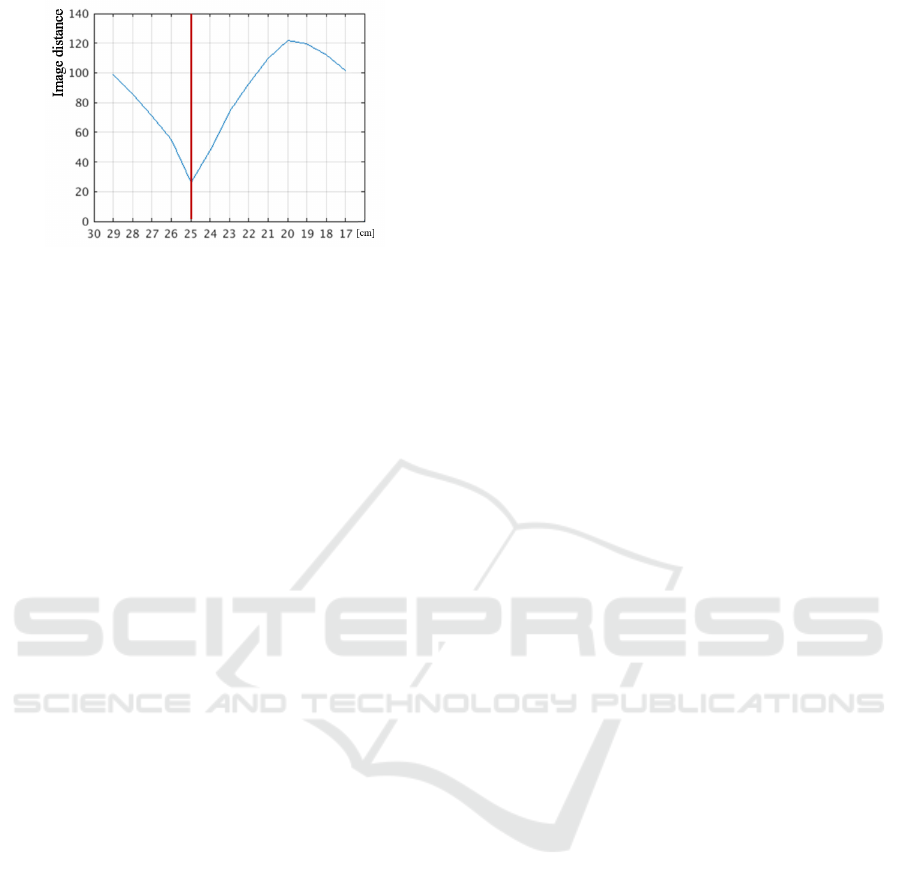
Figure 13: Depth estimation result.
dation of the estimation, we compute the difference
of a reprojection image and an input image for each
depth. Figure 13 shows the distance of the images at
each depth. In this graph, the vertical axis indicates
the distance of the images and the horizontal axis in-
dicates the estimated depth. The red line in the figure
shows correct depth. In this graph, the distance of
the image becomes local minimum at the true depth.
This, in fact, indicates that the distance between the
reprojection image and input image represents the va-
lidation of the estimated depth. Therefore, our met-
hod can estimate the depth from a single image.
These experimental results indicate our proposed
model can describe the behavior of the light rays ef-
ficiently and effectively. In addition, the calibration
and reconstruction methods based on the model work
efficiently.
6 SIMULTANEOUS ESTIMATION
OF CAMERA PARAMETERS
AND 3D SCENE
We finally discuss the simultaneous estimation of 3D
shape and camera parameters from an input image. In
an ordinary stereo method, simultaneous estimation
of these parameters, known as bundle adjustment, can
be achieved by minimizing the reprojection error of
the correspondences. In fact, bundle adjustment in
our framework can be achieved in a manner similar
to the ordinary method. In our framework, instead
of point reprojection error, image reprojection error
should be minimized for 3D reconstruction and cali-
bration. Therefore, simultaneous estimation can also
be achieved by minimizing the same error.
In this simultaneous estimation, in addition to the
parameters of the 3D shape, camera parameters are
estimated as well. When the 3D scene is represented
by an N-th order Bezier, (N + 1)
2
parameters are re-
quired. In addition, L water drops require L ×M (M is
the number of coefficients) parameters for estimating
the camera model. Totally, (N + 1)
2
+LM parameters
should be estimated for the simultaneous estimation.
This, in fact, indicates that (N + 1)
2
+ LM or more
than (N + 1)
2
+LM constraints are necessary for esti-
mating these parameters. In our proposed estimation,
all pixels are used for this estimation, and then, suf-
ficient number of constraints are obtained when the
number of pixels are larger than (N + 1)
2
+ LM.
7 CONCLUSION
In this paper, we propose 3D scene reconstruction
from a single image using water drops. In our propo-
sed method, water drops in the images are regarded as
virtual cameras and the 3D shape is reconstructed by
using the virtual cameras. For the efficient description
of the virtual cameras, we utilize an optical aberra-
tion model by Zernike basis. By using the aberration
model, complicated light ray refractions can be des-
cribed via few coefficients. Furthermore, parametric
3D scene description is employed for estimating the
3D scene effectively. We show experimental results
in the simulation environment and the results demon-
strate the potential of our proposed method. In future
work, we extend our proposed method to the simul-
taneous estimation of camera parameters and 3D sce-
nes.
REFERENCES
Arvind V. Iyer, J. B. (2018). Depth variation and stereo
processing tasks in natural scenes. J. Vis, 18(6).
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In Computer vision–
ECCV 2006, pages 404–417. Springer.
Chen, C., Lin, H., Yu, Z., Kang, S. B., and Yu, J. (2014).
Light field stereo matching using bilateral statistics of
surface cameras. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Cheung, G. K., Kanade, T., Bouguet, J.-Y., and Holler, M.
(2000). A real time system for robust 3d voxel recon-
struction of human motions. In Computer Vision and
Pattern Recognition, 2000. Proceedings. IEEE Confe-
rence on, volume 2, pages 714–720. IEEE.
Geary, J. M. (1995). Introduction to Wavefront Sensors.
Society of Photo Optical.
Klein, G. and Murray, D. (2009). Parallel tracking and map-
ping on a camera phone. In Proc. Eigth IEEE and
ACM International Symposium on Mixed and Aug-
mented Reality (ISMAR’09), Orlando.
Kolmogorov, V. and Zabih, R. (2002). Multi-camera scene
reconstruction via graph cuts. In Computer Vision
ECCV 2002, pages 82–96. Springer.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
906

Levoy, M. and Hanrahan, P. (1996). Light field rende-
ring. In Proceedings of the 23rd Annual Conference
on Computer Graphics and Interactive Techniques,
SIGGRAPH ’96, pages 31–42.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer vision, 1999. The pro-
ceedings of the seventh IEEE international conference
on, volume 2, pages 1150–1157. Ieee.
Newcombe, R. A., Lovegrove, S. J., and Davison, A. J.
(2011). Dtam: Dense tracking and mapping in real-
time. In Proceedings of the 2011 International Confe-
rence on Computer Vision, pages 2320–2327.
Posdamer, J. and Altschuler, M. (1982). Surface mea-
surement by space-encoded projected beam systems.
Computer graphics and image processing, 18(1):1–
17.
Roddier, F. (2004). Adaptive Optics in Astronomy. Cam-
bridge University Press.
Tyson, R. K. (2010). Principles of Adaptive Optics. CRC
Press.
You, S., Tan, R. T., Kawakami, R., Mukaigawa, Y., and
Ikeuchi, K. (2016). Waterdrop stereo. In arXiv.
Natural Stereo Camera Array using Waterdrops for Single Shot 3D Reconstruction
907
