
Eye Gesture in a Mixed Reality Environment
Almoctar Hassoumi and Christophe Hurter
French Civil Aviation University, ENAC, Avenue Edouard Belin, Toulouse, France
Keywords:
Eye-movement, Interaction, Eye Tracking, Smooth Pursuit, Mixed Reality, Accessibility.
Abstract:
Using a simple approach, we demonstrate that eye gestures could provide a highly accurate interaction modal-
ity in a mixed reality environment. Such interaction has been proposed for desktop and mobile devices.
Recently, Gaze gesture has gained a special interest in Human-Computer Interaction and granted new interac-
tion possibilities, particularly for accessibility. We introduce a new approach to investigate how gaze tracking
technologies could help people with ALS or other motor impairments to interact with computing devices. In
this paper, we propose a touch-free, eye movement based entry mechanism for mixed reality environments
that can be used without any prior calibration. We evaluate the usability of the system with 7 participants,
describe the implementation of the method and discuss its advantages over traditional input modalities.
1 INTRODUCTION
The standard hand gesture interactions in a mixed re-
ality environment have been successfully used in a
great number of applications (Chaconas and Hllerer,
2018; Piumsomboon et al., 2013), for example in vir-
tual text entry (Figure 1). Yet, despite its effective-
ness, many questions still persist. For example, how
could we extend the interactions for accessibility. In
addition, the input methods proposed in traditional
systems are tedious, uncomfortable and often suffer
from spatial positioning accuracy (Kyt
¨
o et al., 2018).
Not surprisingly, people with body weaknesses, poor
coordination, lack of muscle control or motor impair-
ments could not rely on these conventional hand ges-
tures to communicate with computing devices. For
these persons, other means or input are required. Gen-
erally, the eye muscles are not affected and could
be used for interacting with systems (Zhang et al.,
2017). In this work, we focus on a touch-free gesture
interaction that builds on smooth pursuit eye move-
ment. Smooth pursuit is a bodily function which al-
lows maintaining a moving object in the fovea. The
advantage of this eye movement is that users can per-
form it voluntarily in contrast to other types of eye
movements, i.e., saccade and fixation (Collewijn and
Tamminga, 1984). For example, blinking has been
proposed as an interaction technique (Mistry et al.,
2010). However, human often blinks subconsciously
in order to protect the eyes from external irritants or
spread tears across the cornea. To implement our
approach, we leverage two simple modules. The
user pupil center location and the user interface that
draws the trajectories of the moving stimuli. Pupil
images are captured using a Pupil Labs Eye camera
(Kassner et al., 2014). The Hololens serves as the
mixed reality device. Therefore, the user interface is
displayed in the Hololens field of view (FOV). Let
p
i
∈ R
2
be the x, y-coordinates of the i-th pupil cen-
ter position in the camera frame I. Then the vector
P = (p
|
1
, p
|
2
, . . . , p
|
n
)
>
∈ R
2n
denotes the pupil cen-
ter positions in I during a smooth pursuit movement.
Notice that we do not use the world camera of the
eye tracker and no prior calibration is performed. We
will comment shortly on the pupil center detection al-
gorithm. The second module is the evolution of the
moving stimuli with time. We will only consider the
case of a constant speed v = const. However, the
speed of the moving stimuli could be accelerated or
decelerated. The Pearson’s correlation is used to cal-
culate the correlation between the pupil center loca-
tions and the targets’ stimuli positions (Velloso et al.,
2018). The results show that our approach is not af-
fected by geometrical transformations (scaling, rota-
tion and translation), at least, when the trajectories are
in the field of view of the user. To illustrate our ap-
proach, we investigate the specific case of PIN entry.
PINs are traditionally entered using key pressing or
touch input. In a mixed reality environment, a virtual
keyboard appears in the FOV and is used as an in-
put modality. People with motor disabilities are often
helped by an assistant, even for entering a password
in a system. This reduces considerably their privacy.
Hassoumi, A. and Hurter, C.
Eye Gesture in a Mixed Reality Environment.
DOI: 10.5220/0007684001830187
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 183-187
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
183

2 RELATED WORKS
This work builds upon recent studies in eye move-
ment research. The use of eye movement in Human-
Computer interfaces systems such as PDAs, ATMs,
smartphones, and computers has been well studied
(Feit et al., 2017). Smooth pursuit, scanpath, sac-
cades, and vestibulo-ocular reflex are some of the
common ways to use gaze gestures in order to inter-
act with a system. Recently, there has been a great
variety of cheap eye-tracking systems that enable es-
timating user gaze position accurately (Kassner et al.,
2014). Eye gaze interactions have been proposed as
a reliable input modality (Zhang et al., 2017), espe-
cially for people with motor impairments. The Dwell
method which allows selecting a target after a pre-
defined time is one of the most used methods (Mott
et al., 2017). However, this approach requires a prior
calibration session where the user fixates on a series
of stimuli placed at different locations (Santini et al.,
2017; Hassoumi et al., 2018). The most accurate sys-
tems require a 9-points calibration before the gaze di-
rection is accurately estimated (Kassner et al., 2014).
In this work, we investigate a novel calibration-free
approach that leverages the potential of smooth pur-
suit eye movement to select a target by following its
movement. In addition, the dwell approach is limited
by the time threshold. For example, if the threshold is
defined for 200 ms, the user cannot fixate on a target
for more than 200 ms, otherwise, a selection is trig-
gered. Recently smooth pursuit eye movement has
allowed a calibration-free gaze-based interaction. In
SmoothMoves, Esteves et al. (2015) computed the
correlation between targets on-screen movements and
user’s head movement for selection. Delamare et al.
(2017) proposed G3, a system for selecting different
tasks based on the relative movements of the eyes. Or-
bits (Esteves et al., 2015) and PathWord (Almoctar
et al., 2018) allowed selecting a target by matching its
movement. Subsequently, a great number of applica-
tions using smooth pursuit have been proposed. See
(Esteves et al., 2015) for a review.
3 IMPLEMENTATION
We use a Microsoft Hololens with a Pupil Labs Eye
tracker. The device is equipped with one eye cam-
era
1
. The computer vision algorithms used to detect
and track the pupil center positions reduced the frame
rate by 5%. A C# desktop software was built using
the EmguCv 3.1
2
on an XPS 15 9530 Dell Laptop
1
Sampling rate: 120 Hz, resolution: 640 × 480 pixels
2
An OpenCV 3.1 wrapper for C#
Figure 1: A keyboard interface in a mixed reality environ-
ment. Selection is made with Air Tap and Bloom gestures.
Figure 2: Our proposed PIN entry interface that uses user
relative smooth pursuit eye movement for selection.
Figure 3: A user trying to select the digit 2 . A-A user eye
under infrared light, captured by the camera. See how the
pupil is darker compared to other features of the eye. B-The
digit being selected.
64 bits with an Intel(R) Core(TM) I7-4712HQ CPU
2.30GHz, 4 core(s), 8 processes, 16GB of Random
Access Memory, 2GB swapping Memory.
3.1 Overview of the Method
Digits provide a useful and simple way to enter a pass-
word in a system. The method has been efficiently im-
plemented on mobile devices to protect users against
shoulder surfing and smudge attacks (Almoctar et al.,
2018). We examine the method in a mixed reality en-
vironment. Numbers from zero to nine are drawn on
the user interface using simple mathematical formu-
las (Circles and Lines equation only, see Figure 5).
For instance, the digit 3 consists of two half cir-
cles and the digit 2 is drawn using a three-quarter
circle, another quarter circle and a segment between
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
184
two points (Figure 5). The remaining digits are drawn
similarly. A moving stimulus (blue circle in Figure
2) is displayed on each digit and moves along the tra-
jectory defined by the digit. Therefore, whenever the
user needs to select a digit, he carefully follows the
moving stimuli (Figure 3B) that moves on the digit’s
shape. While following the stimulus, the user pupil
center moves accordingly and implicitly draws the
shape of the digit. The 2D points representing the
pupil trajectory P = (p
|
1
, p
|
2
, . . . , p
|
n
)
>
∈ R
2n
are com-
pared against every digit in order to select the best
match. The digit which points are more correlated in
both x and y-axes, is likely to be the selected number.
However, to avoid false activation and subsequent er-
rors, the correlations must exceed a predefined thresh-
old. On a scale of -1 to 1, we set the threshold to 0.82
based on a pilot study with participants. Remarkably,
since the stimuli are moving constantly, the probabil-
ity to start following it, at the start of its trajectory is
very low. In most cases, the user will start follow-
ing the stimulus after it has already started its move-
ment. However, the simple mathematical shapes used
to draw the digits allow obtaining a unique represen-
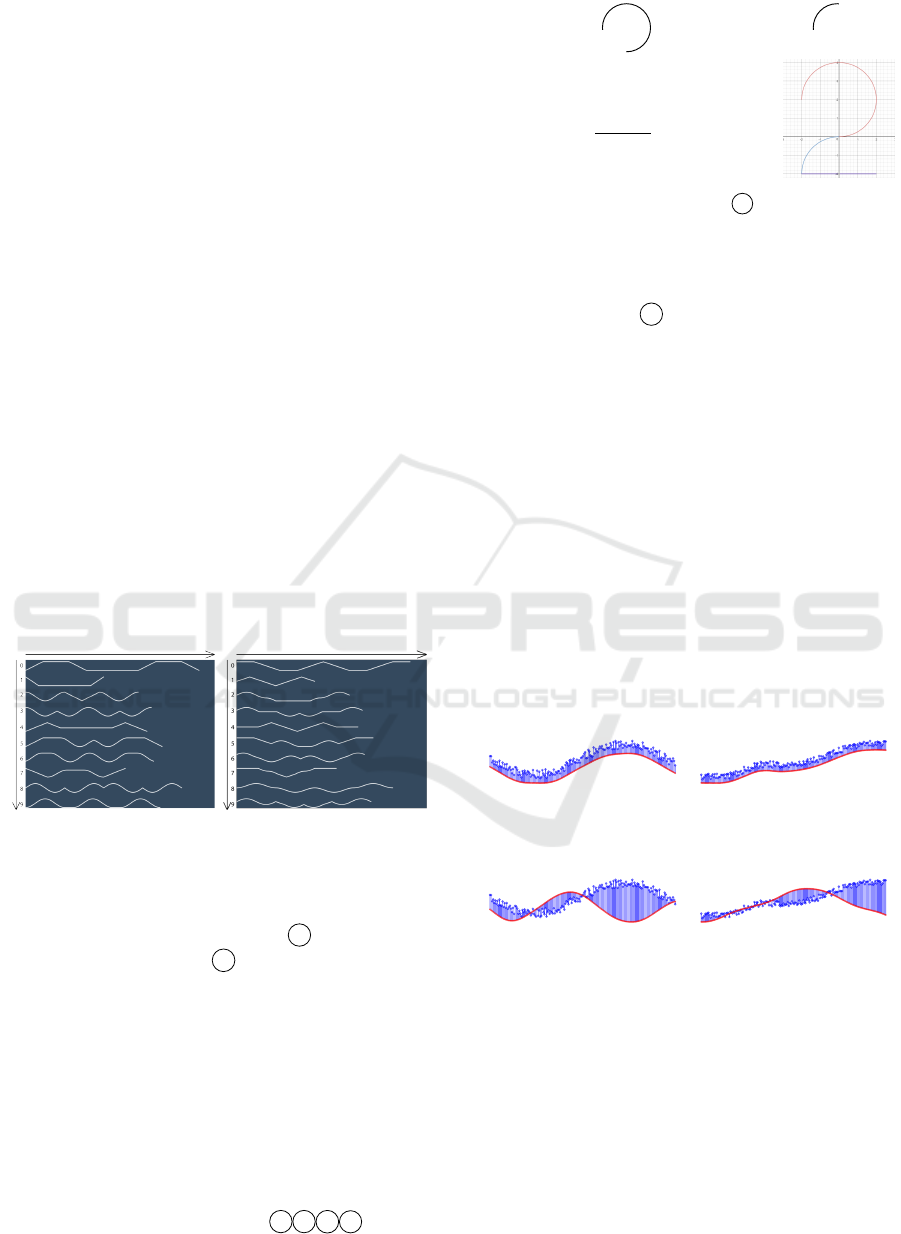
tation for every digit. Figure 4 below shows the rep-
resentation of the digits in the x-axis and y-axis sepa-
rately. Notice how the shapes are different from each
other in both axes separately.
Number of Points Number of Points
Positions of x-values
Positions of y-values
Figure 4: Representation of the digit from zero to nine in x
(left) and y-axis (right).
The lengths of each digit in x and y-axes are different,
that is, the number of points used to draw each digit
is different. For instance, the digit 1 is drawn with
fewer points than the digit 8 . The unique form of the
shapes on 1-dimension (x- or y-axis only) is sufficient
to obtain accurate results, however, in order to make
the algorithm more robust, we used both axes, that is,
the correlation in both x and y axes are calculated.
3.2 Interaction and Metric
Figure 2 shows the user interface of the proposed ap-
proach. The user selects a single digit by following
the blue stimulus moving on its shape using their eye.
For example, inserting the PIN 2 1 8 7 , begins
by following the blue stimulus moving on the shape
{
x
=
y
=
/2,]
(C)
{
x
=
y
=
/2,]
(C)
{
M(x,y)
x
=
t
y
=
(S)
(C)U(C)U(S)
Figure 5: Composition of the digit 2 using simple math-
ematical formulas. (C
1
) represents a three-quarter circle,
(C
2
) a quarter of a second circle and (S
1
) is the segment
representing the bottom line of the digit.
defined by the digit 2 in the user interface (Figure
3). Thereafter, the subsequent digits are selected sim-
ilarly. Since the blue circle moves gradually at a con-
stant velocity, the pupil positions of the user change
accordingly in the eye camera imaging frame. The
positions of the blue circles on all digits along with
the positions of the pupil centers are stored for fur-
ther processing. A mathematical measurement that
gives the strength of the linear association between
two sets of data is computed. This measure is the
Pearson product-moment correlation coefficient (Vi-
dal et al., 2013), named in honor of the English statis-
tician Karl Pearson (1857-1936). Previous work used
this metric, and to the best of our knowledge, Vidal et
al. (2013) were the first to initiate this approach for
eye tracking interaction. Examples of high (Figure 6)
and low (Figure 7) pupil − target stimulus correla-
tions are shown below.
x−values
y−values
X-values
Y-values
Figure 6: Illustration of a high similarity between pupil cen-
ter positions (blue circles) and a moving stimulus position
(red circles).
y−values
x−values
X-values
Y-values
Figure 7: Illustration of a dissimilarity between pupil center
positions (blue circles) and a moving stimulus position (red
circles).
3.3 Pupil Detection
Our system uses the eye camera of a Pupil Labs Eye
tracker. The camera is set up with an Infrared pass-
ing filter. A Near-Infrared LED illuminator is located
in the immediate vicinity of the camera to illuminate
the eye which conducts to corneal reflections in the
subjects eye image. The presence of the visible light
is circumvented and it becomes easier to separate the
pupil from the iris. The pupil appears then as a darker
Eye Gesture in a Mixed Reality Environment
185

circular blob in the eye image.
Initially, the pupil center of the subject is detected
and tracked by the infrared camera. An accurate pupil
center detection is essential in this prototype. The
pupil detection algorithm implemented in this study
locates the features of the dark pupil present in the
IR illuminated eye camera frame. The algorithm is
implemented so that the user can move their head
freely, thus, we do not use pupil corneal reflection
to compensate small head movements. A 640 × 480
frame is grabbed from the IR illuminated eye cam-
era. The image pixels color are thus converted from
3 channels RGB color space to 1-channel gray inten-
sity value. The grayscale image is, afterward, used
for automatic pupil area detection. We call this part
automatic thresholding: starting with a user-defined
threshold value T = 21 chosen experimentally, thresh-
olding is used to create a binary image. T must be
comprised between 0 and 255. Thresholding con-
sists of replacing each pixel of a grayscale image into
black or white. The pixel which has a gray intensity
value smaller than the defined threshold (I(i,j) < T)
is transformed into black and the pixel having a gray
value intensity greater than the threshold (I(i,j) > T)
is transformed into black. Since People have different
pupil darkness, the user is allowed to define a range of
black pixels that will define their pupil pixels. By de-
fault, we set a range r =[2000-4000] (chosen empir-
ically). The algorithm checks if the number of black
pixels is included in that range. If so, the next step of
the pupil detection process is executed, otherwise, the
defined threshold value is incremented and the algo-
rithm checks again if the number of black pixels is in-
cluded in that range. The process is repeated again un-
til the number of black pixels is included in the range.
However, it is important to note that choosing a
high value for the range’s maximum value may lead
to an increase or number of false black pixel apper-
taining to the pupil. Choosing a small value for the
range’s minimum may lead to getting small pupil
area, thus providing an inaccurate pupil center. If
Figure 8: Illustration of pupil tracking and detection
pipeline.
a pupil area is found, the algorithm detects closed
contours in the thresholded image Using (Fitzgibbon
et al., 1999) algorithm (Figure 8), the ellipse that best
fits, in a least-square sense, each contour found in the
thresholded image is detected (step 4 of Figure 8).
The center is then saved. The convex Hull (Sklan-
sky, 1982) of the points representing each contour is
found. The Convex Hull that has the highest isomet-
ric quotient, i.e. the best circularity is considered as
the one representing the pupil. Its corresponding best
fit ellipse center is stored as the pupil center for this
frame.
4 PILOT STUDY RESULTS
We have investigated the perceived task load of
the technique using a NASA-TLX questionnaire. 7
healthy participants (4 females) were recruited for
the experiment. a 5-minutes acquaintance period was
given to the participants in order to be familiar with
the interaction. The tasks were counterbalanced to
reduce learning effects. The primary results indi-
cated that, among the feature tested, the frustration
gave the lowest work load as shown in Figure 9,
(µ = 4.16, σ = 3.81). The highest load was obtained
for Effort (µ = 11.66, σ = 3.72). During the indi-
vidual interview with the participants, we found that
they indicated a high effort load because this is their
first smooth pursuit interaction attempt. The remain-
ing perceived loads were as follows: µ
Mental
= 9.0
(σ
Mental
= 4.33), µ
Physical
= 8.33 (σ
Physical
= 6.15),
µ
Temporal
= 8.83 (σ
Temporal
= 4.21), µ
Per f ormance
= 7.5
(σ
Mental
= 4.41). It can be noted that the effort could
be reduced by changing different parameters of the al-
gorithm, for example, the size or the orientation of the
targets. In addition, the speed could be modified for
each user.
0 5 10 15
Mean Load Index
Effort
Frustration
Mental Demand
Performance
Physical Demand
Temporal Demand
Figure 9: Results of the pilot study evaluation.
5 LIMITATIONS
Our approach suffers from common known issues.
For example, Lighting conditions, head poses, and
eyelashes reduce the accuracy of the pupil detection.
Moreover, the digits must have an acceptable size,
otherwise, the pupil center positions will appear to be
HUCAPP 2019 - 3rd International Conference on Human Computer Interaction Theory and Applications
186

static or unchanged. This problem may also occur
when the user interface is displayed far from the user
FOV. We tested our approach with 7 participants and
although the initial feedbacks are positive and encour-
aging, we plan to conduct an experiment in real-world
scenarios and report the results in follow-up studies.
As we are improving the system, we are implement-
ing algorithms and methods to detect the digits faster.
In addition, the algorithm was tested with user with
full mobility. Additional evaluation will help under-
stand the effectiveness of the approach in real-world
scenarios with subjects restricted in their motor skills.
6 CONCLUSION
In this paper, we presented a novel eye-based inter-
action entry that uses smooth pursuit eye movement.
A key point of this paradigm is that a selection im-
plies that the user has followed a moving target, thus
eliminating the Midas touch problem. Other applica-
tions may benefit from this interaction technique, for
example entering a flight level in a virtual Air Traf-
fic Control Simulator. Future work will explore digits
recognition time and investigate the potential of this
method on alphanumeric characters.
REFERENCES
Almoctar, H., Irani, P., Peysakhovich, V., and Hurter, C.
(2018). Path word: A multimodal password en-
try method for ad-hoc authentication based on digits’
shape and smooth pursuit eye movements. In Pro-
ceedings of the 20th ACM International Conference
on Multimodal Interaction, ICMI ’18, pages 268–277,
New York, NY, USA. ACM.
Chaconas, N. and Hllerer, T. (2018). An evaluation of bi-
manual gestures on the microsoft hololens. In 2018
IEEE Conference on Virtual Reality and 3D User In-
terfaces (VR), pages 1–8.
Collewijn, H. and Tamminga, E. P. (1984). Human smooth
and saccadic eye movements during voluntary pursuit
of different target motions on different backgrounds.
The Journal of Physiology, 351(1):217–250.
Esteves, A., Velloso, E., Bulling, A., and Gellersen, H.
(2015). Orbits: Gaze interaction for smart watches
using smooth pursuit eye movements. In Proceedings
of the 28th Annual ACM Symposium on User Interface
Software Technology, UIST ’15, pages 457–466, New
York, NY, USA. ACM.
Feit, A. M., Williams, S., Toledo, A., Paradiso, A., Kulka-
rni, H., Kane, S., and Morris, M. R. (2017). Toward
everyday gaze input: Accuracy and precision of eye
tracking and implications for design. In Proceedings
of the 2017 CHI Conference on Human Factors in
Computing Systems, CHI ’17, pages 1118–1130, New
York, NY, USA. ACM.
Fitzgibbon, A., Pilu, M., and Fisher, R. B. (1999). Di-
rect least square fitting of ellipses. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
21(5):476–480.
Hassoumi, A., Peysakhovich, V., and Hurter, C. (2018). Un-
certainty visualization of gaze estimation to support
operator-controlled calibration. Journal of Eye Move-
ment Research, 10(5).
Kassner, M., Patera, W., and Bulling, A. (2014). Pupil: An
open source platform for pervasive eye tracking and
mobile gaze-based interaction. In Proceedings of the
2014 ACM International Joint Conference on Perva-
sive and Ubiquitous Computing: Adjunct Publication,
UbiComp ’14 Adjunct, pages 1151–1160, New York,
NY, USA. ACM.
Kyt
¨
o, M., Ens, B., Piumsomboon, T., Lee, G. A., and
Billinghurst, M. (2018). Pinpointing: Precise head-
and eye-based target selection for augmented reality.
In Proceedings of the 2018 CHI Conference on Hu-
man Factors in Computing Systems, CHI ’18, pages
81:1–81:14, New York, NY, USA. ACM.
Mistry, P., Ishii, K., Inami, M., and Igarashi, T. (2010).
Blinkbot: Look at, blink and move. In Adjunct Pro-
ceedings of the 23Nd Annual ACM Symposium on
User Interface Software and Technology, UIST ’10,
pages 397–398, New York, NY, USA. ACM.
Mott, M. E., Williams, S., Wobbrock, J. O., and Morris,
M. R. (2017). Improving dwell-based gaze typing
with dynamic, cascading dwell times. In Proceed-
ings of the 2017 CHI Conference on Human Factors in
Computing Systems, CHI ’17, pages 2558–2570, New
York, NY, USA. ACM.
Piumsomboon, T., Clark, A., Billinghurst, M., and Cock-
burn, A. (2013). User-defined gestures for augmented
reality. In CHI ’13 Extended Abstracts on Human Fac-
tors in Computing Systems, CHI EA ’13, pages 955–
960, New York, NY, USA. ACM.
Santini, T., Fuhl, W., and Kasneci, E. (2017). Calibme:
Fast and unsupervised eye tracker calibration for gaze-
based pervasive human-computer interaction. In Pro-
ceedings of the 2017 CHI Conference on Human Fac-
tors in Computing Systems, CHI ’17, pages 2594–
2605, New York, NY, USA. ACM.
Sklansky, J. (1982). Finding the convex hull of a simple
polygon. Pattern Recogn. Lett., 1(2):79–83.
Velloso, E., Coutinho, F. L., Kurauchi, A., and Morimoto,
C. H. (2018). Circular orbits detection for gaze inter-
action using 2d correlation and profile matching algo-
rithms. In Proceedings of the 2018 ACM Symposium
on Eye Tracking Research & Applications, ETRA ’18,
pages 25:1–25:9, New York, NY, USA. ACM.
Vidal, M., Bulling, A., and Gellersen, H. (2013). Pur-
suits: spontaneous interaction with displays based on
smooth pursuit eye movement and moving targets. In
Proceedings of the 2013 ACM international joint con-
ference on Pervasive and ubiquitous computing, pages
439–448. ACM.
Zhang, X., Kulkarni, H., and Morris, M. R. (2017).
Smartphone-based gaze gesture communication for
people with motor disabilities. In Proceedings of the
2017 CHI Conference on Human Factors in Comput-
ing Systems, CHI ’17, pages 2878–2889, New York,
NY, USA. ACM.
Eye Gesture in a Mixed Reality Environment
187
