
New Designs of -means Clustering and Crossover Operator for
Solving Traveling Salesman Problems using Evolutionary Algorithms
Ismail M. Ali
a
, Daryl Essam
b
and Kathryn Kasmarik
c
School of Engineering and Information Technology, University of New South Wales, Canberra, Australia
Keywords: Traveling Salesman Problem, Genetic Algorithm, Differential Evolution, Clustering Method, Evolutionary
Algorithms.
Abstract: The traveling salesman problem is a well-known combinatorial optimization problem with permutation-based
variables, which has been proven to be an NP-complete problem. Over the last few decades, many
evolutionary algorithms have been developed for solving it. In this study, a new design that uses the -means
clustering method, is proposed to be used as a repairing method for the individuals in the initial population.
In addition, a new crossover operator is introduced to improve the evolving process of an evolutionary
algorithm and hence its performance. To investigate the performance of the proposed mechanism, two popular
evolutionary algorithms (genetic algorithm and differential evolution) have been implemented for solving 18
instances of traveling salesman problems and the results have been compared with those obtained from
standard versions of GA and DE, and 3 other state-of-the-art algorithms. Results show that the proposed
components can significantly improve the performance of EAs while solving TSPs with small, medium and
large-sized problems.
1 INTRODUCTION
The traveling salesman problem (TSP) is a prevalent
mathematics problem that requests the shortest
possible distance to visit a set of cities. Despite the
simplicity of its definition, TSP is one of the most
challenging combinatorial optimization problems
(COPs) in real world. Its practical importance is
shown in many fields, such as operational research,
algorithms design and artificial intelligence, and also
in many engineering applications, like design of
hardware devices and radio electronic systems, and
computer networks (Evans, 2017). So, it attracted the
attention of several researches for many years to find
the best way for optimally solving TSPs in a
reasonable computational time.
Many exact algorithms, which can accurately find
the optimum solution, have been introduced for
solving TSPs (Miller and Pekny, 1991). However,
they have been considered inapplicable for solving
many instances of TSPs, which were proven to be an
NP-hard COP (Jünger et al., 1995). In recent years,
a
https://orcid.org/0000-0001-5925-1988
b
https://orcid.org/0000-0002-6923-7079
c
https://orcid.org/0000-0001-7187-0474
several heuristics methods, which can find near
optimum solution, have been developed for TSPs and
they achieved better results than exact ones in terms
of computational time. Among these methods,
evolutionary algorithms (EAs), which demonstrate a
very promising direction for TSPs. EAs are inspired
by the biological model of evolution and natural
selection, and they have a long history of successfully
solving optimization problems (Bäck et al., 2018).
Many EAs-based approaches have been
introduced for solving TSPs. Some of them were
integrating local searches (Mavrovouniotis et al.,
2017), and these studies showed that incorporation of
local search operators can significantly improve the
performance of EAs. Other EAs, such as genetic
algorithms (GAs) and differential evolution (DE)
algorithms have also been developed for TSPs.
Recently, GA, with two local operators, called branch
and bound, and cross elimination, was used for
solving multiple TSPs (Lo et al., 2018). A new initial
population strategy, based on -means algorithm,
was also proposed to improve the performance of GA
Ali, I., Essam, D. and Kasmarik, K.
New Designs of k-means Clustering and Crossover Operator for Solving Traveling Salesman Problems using Evolutionar y Algorithms.
DOI: 10.5220/0007940001230130
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 123-130
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123

(Deng et al., 2015). Although the algorithm achieved
better error values than the random generation, the
obtained error values are still away from the optimal
solutions. Moreover, many DE algorithms have been
introduced for TSPs (Wei et al., 2016, Wang and Xu,
2011). However, many of the studies have been tested
on small and medium TSPs.
Seeking to improve the performance of EAs and
overcome some limitations that presented in the
previous research works, such as slow convergence,
increased computational time, and poor quality of
solutions, the following contributions are proposed in
this paper: 1) a new design of -means clustering to
be used as a repairing method for the generated
individuals in the initial population, which can
increase the convergence speed of an EA and increase
the possibility of getting the optimal solution in a
lower computational time; 2) a new crossover
operator, which is designed based on the
characteristics of TSPs to increase the population
diversity and improve the evolving processes of an
EAs. Finally, the proposed components have been
implemented using GA and DE for solving different
instances of TSP and the results were compared with
those from state-of-the-art algorithms and standard
versions of GA and DE.
The rest of this paper is organized as follows.
Section 2 presents the objective function of TSPs and
the original structures of GA and DE. Section 3
represents the proposed components. Section 4
discusses the experimental results and comparisons.
Finally, conclusion drawn from this study and future
work are provided in Section 5.
2 BACKGROUND
In this section, the definition and objective function
of TSPs, and the standard versions of GA and DE are
introduced.
2.1 Traveling Salesman Problem
The traveling salesman problem (TSP) is a well-
known COP with discrete decision variables. In 1930,
TSP was formulated as a mathematical problem for
the first time. In traditional TSP, a person has a task
of visiting numbers of cities. He needs to visit
every city only once in any order starting from any
city and returning back to the home city from where
he started. Given the distances between each city, the
person needs to minimize the total travelled distance
during his trip. The objective is to find the shortest
tour that visits each city exactly ones, and then return
to the starting city. Mathematically, the objective
function of TSP can be described as minimization of
the total distances between visited cities, in addition
to the distance of returning to start city, as follows:
Minimize: , where
(1)
where is the total distance of the trip, is the
number of cities to be visited, = 1, 2, …, .
is
the return distance from the last city () to the first
one, and
is the distance between two
consecutive cities and .
2.2 Standard Versions of Genetic
Algorithm and Differential
Evolution
Both GA and DE belong to EAs (Bäck et al., 2018).
They solve a problem by iteratively improving the
candidate solutions through three evolving operators,
namely: mutation, crossover and selection. These
operators are applied to guide the search to find
optimal solutions. The first basic difference between
GA and DE is the order of evolving operators’
execution, as GA applies selection then crossover and
finally mutation, whereas DE considers mutation
first, then crossover and selection. The second major
difference is that GA performs an additional process
called elitism, which ensures that the best individual
from the current generation is carried over to the next
without any modifications. This process guarantees
that the quality of the solutions is not decreased from
one generation to another. GA and DE are considered
powerful tools for solving optimization problems in
both continuous and discrete spaces. Basically, an
initial population with a pre-determined size () is
generated and then each individual (
), which
consists of variables, is evolved using the three
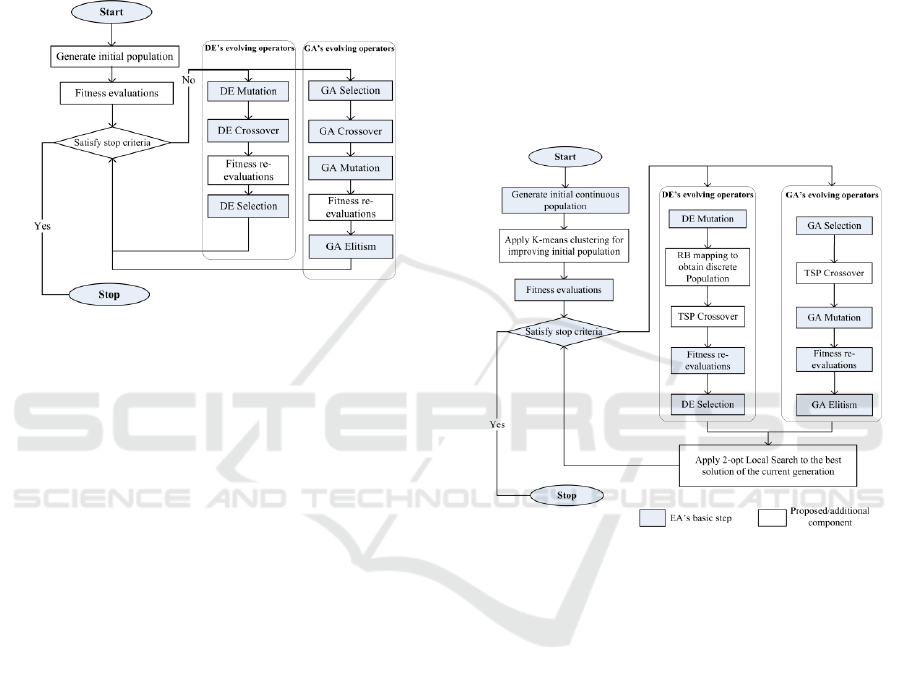
evolutionary operators. Figure 1 shows the basic
outlines of the standard versions of GA and DE and
the order of their three evolving operators.
2.2.1 Mutation Operator
In DE, a mutant vector is generated for each target
vector (
), using this simplest mutation form:
(2)
where is the weighting factor, that controls the
amplification of the differential variation between the
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
124
two vectors
and
, and generally lies within
the range of [0, 2].
are three
randomly chosen vectors, which are not equal to each
other or to the target vector (
). In GA, mutation
modifies one or more gene values in an individual by
swapping them with other genes or flip their values
from the initial state, and hence the individual may
change entirely from the previous one.
Figure 1: Structure of standard GA and DE.
2.2.2 Crossover Operator
In DE, new vectors (trial vectors) are generated by
combining target (individuals from last generation)
and mutant vectors according to a pre-defined
possibility. Binomial and exponential are the two
most well-known types of crossover for DE. In GA,
the new offspring is produced by exchanging
different parts of two randomly selected parents,
where if the first part of the offspring came from first
parent, the second part must come from second
parent, etc. This is called one-point crossover (Ali et
al., 2015), where a random point is generated to
divide both parents into two parts.
2.2.3 Selection Operator
In DE, a comparison of each trial vector and its
corresponding target vector is used to determine
whether trail or target vectors should survive to the
next generation. The greedy strategy is an example of
DE selection operator. In GA, a tournament method
is adopted to select an individual by running several
competitions, based on the fitness values and the
feasibility of the solutions, among a few individuals
selected randomly from the population.
In both GA and DE, the processes of the
evolutionary operations remain as long as a time or a
generation limit is reached, or the number of calling
the fitness evaluation function is greater than a pre-
defined number of calling.
3 PROPOSED EVOLUTIONARY
ALGORITHM
In this paper, two main components have been
developed and implemented in order to improve the
performance of EAs for solving TSPs. In this section,
the basic steps of EAs and the two proposed
components are briefly discussed. Figure 2 shows the
proposed components when adopting with both GA
and DE algorithms as examples of EAs.
Figure 2: Structure of proposed GA and DE.
3.1 Initial Population
The first step in most EA is to generate an initial
population of solutions. So, a population of
solutions is randomly generated. In our algorithm,
every solution can be represented by a discrete vector,
where the length of each vector equals the number of
cities to be visited ().
3.2 -means Clustering as a Repairing
Method
As TSPs are a complex COP, we noticed that the
evolutionary process may take longer to make the
solutions in the initial population converge towards
the optimal solution. So, a new design of -means
clustering method is applied, according to a pre-
defined probability (), to the solutions in
the initial population as a repairing method to
New Designs of k-means Clustering and Crossover Operator for Solving Traveling Salesman Problems using Evolutionary Algorithms
125
improve their qualities within the initial phase, and as
a result, the optimal solution is likely to be found after
a few EA’s generations.
In -means clustering, several locations () are
generated over the geometric problem space
according to Equation 3. A number of groups, equal
to , are formed with those points as the centroids.
Each group attracts the close cities (by their
coordinates) from its centroid.
(3)
After assigning all the cities in groups, each group
is solved as a sub-TSP by finding the shortest sub-
tour between the cities in each group. In order to form
the complete tour of TSP, the distances between the
centroid points () are calculated and the two groups
with the smallest distance between their centroids are
selected to be merged and form a larger group. The
merge between groups is done by connecting two
cities of a group with their closest two cities of the
other group after breaking their local connections.
After that, the centroid point of the new formed group
is calculated and the distances between all the
centroid points ( ) of existing groups are
remeasured. This process is repeated until only one
group ( ) that contains all the cities is formed.
(a) Distribution of
centroid points over
geometric space.
(b) Calculate the
shortest paths in each group
(c) Merging two groups to form a larger one
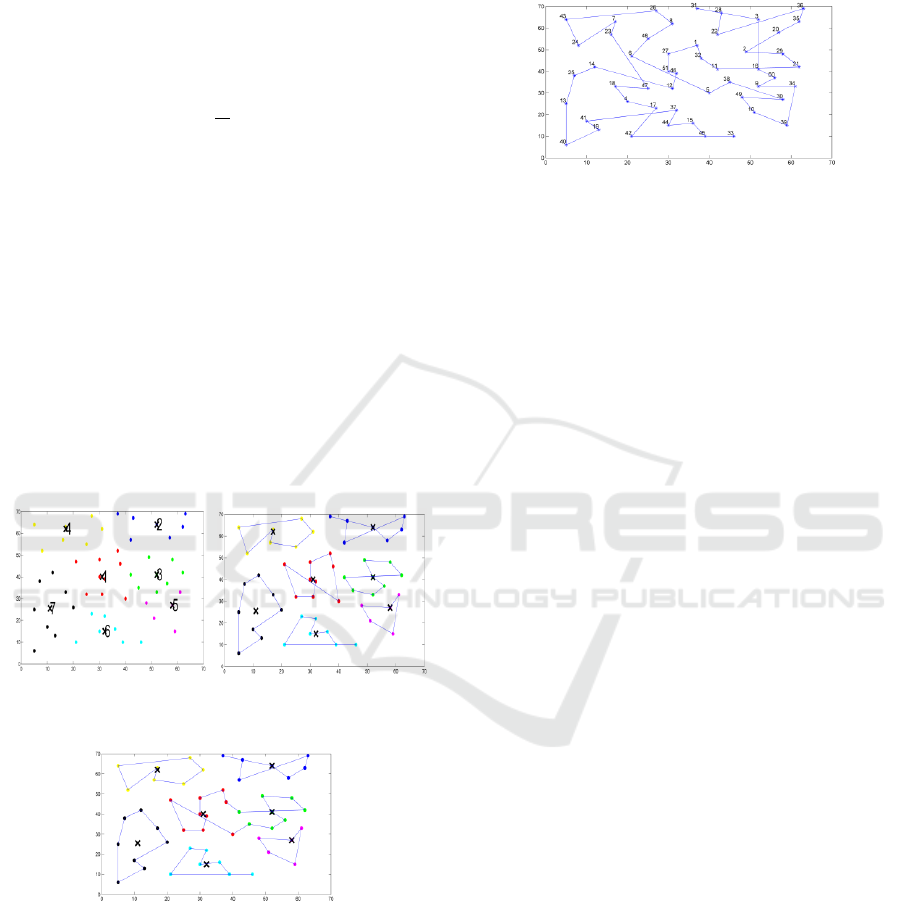
Figure 3: Steps of k-means clustering repairing method.
In Figure 3, the basic steps of -means clustering
repairing method are illustrated. It shows the steps of
the proposed repairing method, for a TSP instance
called eil51 with 51 cities to be visited, as follows: (a)
gives the distribution of the locations over the
search space of the problem; (b) shows the shortest
path in each formed group; (c) displays the generation
of the first group produced from merging group 1
with 3. This last step is repeated until one large group
including all the cities is formed with the shortest path
between them, as the example shown in Figure 4.
Figure 4: Final tour after applying -means clustering
repairing method.
3.3 Fitness Evaluations
After the initial population is generated and repaired,
the fitness value of each individual is measured
seeking to rank them according to their qualities. The
fitness function shown on Equation 1 is used to
calculate the quality of each solution, and then the
solutions are ranked where the fittest one shown first
and the worst last.
3.4 Evolving Operators
3.4.1 Proposed Crossover for TSP
In this paper, a new design of a crossover, which uses
the characteristics of the TSP (TSP-Xover) is given.
In TSP-Xover, the one-point crossover procedure is
followed, where a random cut point () in the range
[1, ] is chosen and two parents are randomly
selected to generate a new offspring. The first part of
the offspring [ ] is copied from one of the
parents, and the second part is completed from the
other. In order to do that, starting from the last city in
the first part of the offspring (), the next city (
) is selected based on its distance from . So, if the
next city is the closest one to the city and has not
been taken before in the offspring (not in the range
[ ]), then next city will be added in offspring at
( ) order. The pseudo-code for the proposed
crossover (TSP-Xover) is provided in Algorithm 1.
3.4.2 Mutation Operator
The standard mutation operators of GA and DE were
implemented in the proposed framework. For DE and
GA, the DE\rand\1 mutation strategy (Equation 2)
and the swap mutation (Bäck et al., 2018) were
adopted, respectively.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
126

Algorithm 1: Pseudo-code of TSP-Xover.
for form 1 to do
if random-number <= then
Parent1 random individual
Parent2another random individual
random point in range
Distance between all cities
Offspring=Parent1(1 to )
while do
city from Parent2
with ( (Parent1( ) and
Parent2(1 to )))
if is not existed in
Offspring(1 to ), then
Offspring()
else
next closest city
from Parent2
end if
end while
end if
end for
3.5 Fitness Re-evaluations and
Selection
After obtaining the new population, a selection
operator is applied to decide which solution can
survive to the next generation. The greedy selection
strategy and the tournament method are applied to DE
and GA, respectively. The solutions in the new
selected population are ranked based on their fitness
values, where the best solution located first.
For comparisons purposes, 2-Opt local search
(Savelsbergh, 1985) is used and applied to the best
solution found in each generation for all standard and
proposed versions of GA and DE.
3.6 Termination Condition
In this study, the number of calling the fitness
function is counted and if this counter exceeds the
predefined allowed number of objective function
evaluations, the algorithm is terminated.
4 EXPERIMENTAL RESULTS
To judge the effect of the proposed components on
the performance of EAs, computational simulations
were carried out using GA and DE (as popular
examples of EAs) for solving 18 instances of TSPs
with small, medium and large dimensions. The
instances were selected from the well-known TSP
library (TSPLIB), which is described in (Reinelt,
1991). Both GA and DE were coded in MATLAB
R2017b, and were performed on a PC with an i7
Processor and 16 GB memory. In our experiments,
each TSP instance was independently executed 30
times with 1,000, 5,000 and 50,000 fitness
evaluations in each run for comparison. The quality
of each algorithm is assessed by calculating the
average error of each problem, which is the error
between the best obtained solution by an algorithm
and the optimal solution of the same problem as
shown in Equation 4.
(4)
4.1 Parameters Settings and Tuning
In this sub-section, the parameters setup of both GA
and DE and the parameter analyses of the two
proposed components are presented.
4.1.1 Parameter Settings
Based on extensive experiments using 18 instances of
TSPs, the final parameters setup of GA and DE are
shown in Table 1.
Table 1: GA and DE parameters setup.
Parameter
Symbol
Value
Number of runs
30
Population size
50
Crossover rate
0.7
Mutation rate
0.2
Number of individuals to be
repaired in the initial population
0.1 (10%)
Maximum fitness evaluations
1000, 5000, and 50,000
4.1.2 Parameters Tuning
Two sets of experiments were designed to analyse
effects of the two proposed components’ parameters
and , while the other parameters’ values
were fixed as shown in Table I. Both , and
, were run with different values for 10 runs for each
value and 5000 fitness evaluations for each run using
GA and DE for solving 18 TSPs. Figures 5 and 6
present the average value of errors of solved TSPs
from their optimal solutions (on bars) and standard
deviations (on vertical small bars) using DE and GA,
respectively. In the figures, DE and GA run with
set to different values of 0, 10, 30, 50, 70,
90 and 100 (%) of . The results show that repairing
New Designs of k-means Clustering and Crossover Operator for Solving Traveling Salesman Problems using Evolutionary Algorithms
127

10% of the individuals in the initial population can
enhance the average error by 47.98% and 61.21%
compared with the average of other parameter values
in DE and GA, respectively. Also, we noticed that
with higher values of , the average error is
increased because of the lack of diversity in the
population. On the other hand, =0%,
achieved worse average error than =10%,
which confirms the importance of the proposed
repairing method. Another experiment run for
analysing parameter by setting it to different
values of 0.1, 0.3, 0.5, 0.7 and 0.9. Based on the
results, it was found that =0.7 achieved the best
average error compared with other values.
Figure 5: Analysis of parameter with standard
deviation error bar using DE.
Figure 6: Analysis of parameter with standard
deviation error bar using GA.
4.2 Effect of k-means Clustering
Repairing Method
This sub-section discusses the effect of applying the
proposed repairing method on performance of an EA.
In order to do that, all TSPs have been solved with
and without applying -means method. Results show
that the proposed method can enhance the quality of
solutions by 76.6% on average. To graphically
present the effect of the proposed method, the best
individuals of 3 TSPs were presented before and after
adopting the proposed method in Figure 7.
Before -means
After -means
eil51 = 1494
eil51 = 588
kroC100 = 149393
kroC100 = 29827
lin318 = 557091
lin318 = 58941
Figure 7: Graphical paths of 3 TSPs before and after
applying the proposed repairing method with the total
distance of each.
For comparison, Figure 7 shows the paths of the
same individual of each problem produced directly
after generation of the initial population (Before -
means) and after being repaired (After -means). The
figure also provides the total distances of each
individual to show differences in their qualities. From
Figure 7, it can be noticed that -means clustering
repairing method can enhance the solutions in the
initial population for TSPs “eil51”, “kroC100”, and
“lin318” by 60.64%, 80%, 89.41%, respectively. The
results demonstrate efficiency of the proposed
repairing method, especially for large TSP instances.
4.3 Comparison with Standard
Versions of GA and DE
In order to judge the effect of the proposed
components on the overall performance of EAs, in
this sub-section the performances of GA and DE will
be compared, with and without, incorporating the
proposed components. In order to do that, the best and
mean values of the average errors produced from i)
standard GA, ii) standard DE, iii) GA + -means and
TSP-Xover, and iv) DE + -means and TSP-Xover
are presented in Table 2.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
128
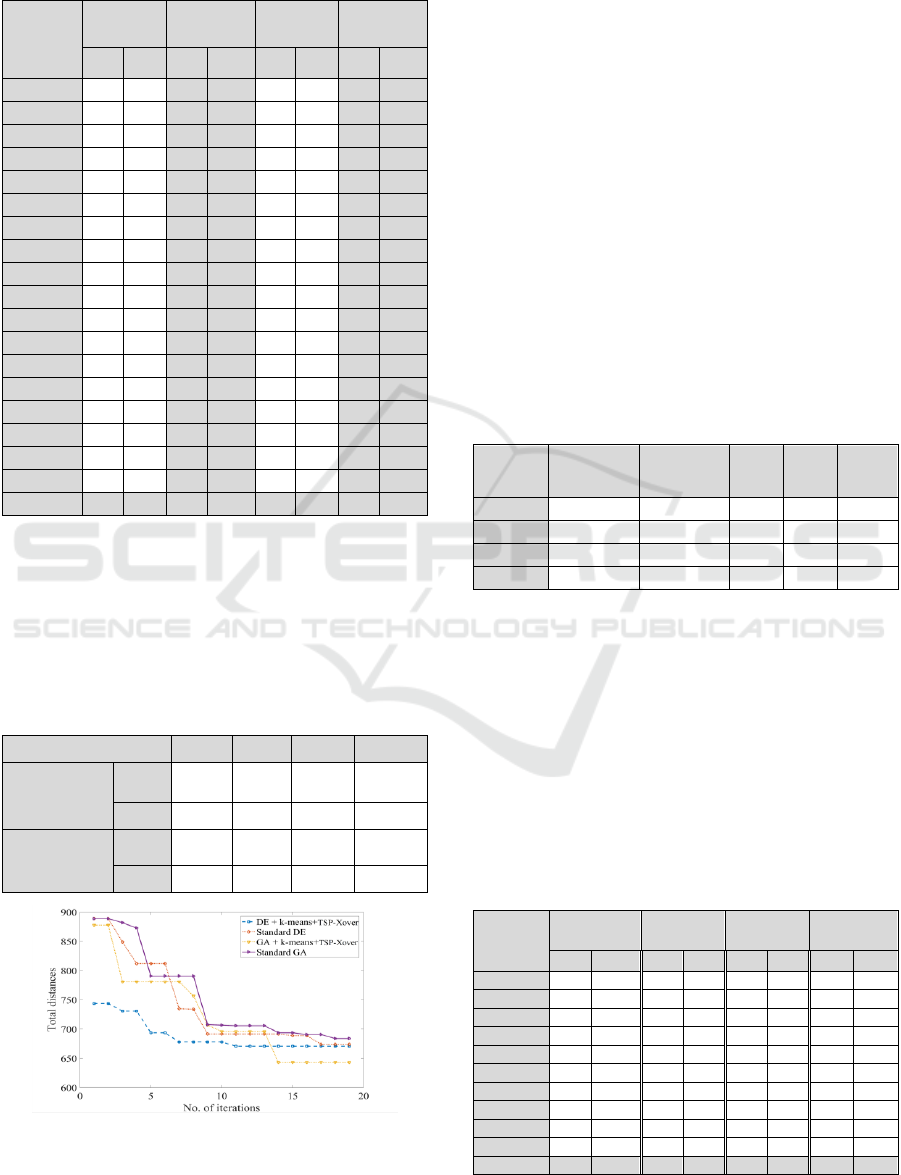
Table 2: Best (B) and mean (M) average errors for 18
instances of TSPs obtained from improved and standard
versions of GA and DE.
Probs
Standard
GA
GA + -
means and
TSP-Xover
Standard
DE
DE + -
means and
TSP-Xover
B
M
B
M
B
M
B
M
eil51
0.0
2.0
0.0
0.8
0.5
1.7
0.2
1.2
berlin52
0.3
2.0
0.0
0.1
0.0
2.2
0.0
0.6
st70
0.2
2.7
0.0
0.6
1.2
2.0
0.3
1.5
eil76
0.2
2.7
0.7
2.5
2.0
4.0
1.9
3.6
pr76
1.6
2.0
0.0
0.5
0.0
1.3
0.0
1.2
kroA100
0.2
1.0
0.0
3.9
0.8
1.9
0.8
2.1
kroC100
0.5
1.7
0.0
3.9
1.0
2.8
1.0
2.7
kroD100
1.1
2.4
0.0
3.9
1.8
3.2
1.6
3.2
eil101
2.7
4.1
0.0
2.5
3.3
5.2
3.0
5.3
lin105
0.4
4.0
0.0
1.0
0.6
1.8
0.2
1.5
pr144
0.1
1.7
0.1
0.5
0.1
0.4
0.1
0.5
ch150
2.9
4.6
0.0
5.1
3.2
4.8
2.8
4.7
kroA150
2.0
4.0
0.1
5.1
2.5
4.2
1.3
4.3
kroB150
2.1
3.6
1.0
5.5
2.3
3.8
2.0
3.9
pr152
0.5
2.1
0.2
3.6
1.2
2.2
1.1
2.3
lin318
4.0
5.7
0.9
7.0
3.8
5.5
3.9
5.5
pcb442
5.8
7.5
0.1
8.1
6.2
7.9
6.0
7.6
d493
4.5
6.3
0.8
7.2
5.2
6.2
5.0
6.3
Avg.
1.6
3.3
0.2
3.4
2.0
3.4
1.7
3.2
A nonparametric statistical test (Woolson, 2007),
which is usually used to assess whether the
population mean ranks of two related samples differ,
is applied to show the significant differences between
the proposed versions of GA and DE and their
standard versions. The outcome is listed in Table 3.
Table 3: Nonparametric Wilcoxon test based on the best
and mean errors from the optimal solution.
Better
Equal
Worse
P.Value
GA + -means
and TSP-Xover
VS. Standard
GA
Best
15
1
2
0.001
Mean
10
0
8
0.931
DE + -means
and TSP-Xover
VS. Standard
DE
Best
14
2
2
0.002
Mean
10
0
8
0.338
Figure 8: Convergence plot of eil101 TSP with 20 iterations
(1000 fitness evaluations).
From results in Table 2 and 3, the versions with
the added proposed components can significantly
enhance the performances of the standard GA and DE
by 86.52% and 12.13% in terms of the best errors
from the optimal solutions of 18 TSPs.
To graphically represent the performance of each
algorithm, the convergence plot of one TSP, namely:
eil101 is shown in Figure 8.
4.4 Comparison with State-of-the-Art
Algorithms
In this sub-section, the performance of the proposed
algorithm is compared with three algorithms from the
state-of-the-art algorithms: 1) improved bat algorithm
(IBA) (Osaba et al., 2016); 2) Discrete firefly
algorithm (DFA) (Osaba et al., 2016); and 3) a
discrete imperialist competitive algorithm (DICA)
(Osaba et al., 2016), as shown in Table 4.
Table 4: Total distances obtained from the proposed
versions of GA and DE and 3 state-of-the-art algorithms.
Probs
GA + -
means and
TSP-Xover
DE + -
means and
TSP-Xover
IBA
DFA
DICA
eil51
426
427
426
426
426
berlin52
7542
7542
7542
7542
7542
st70
675
676
675
675
675
eil76
539
540
539
543
544
Table 4 shows the competitive performance of the
proposed components with GA and DE compared
with other evolutionary algorithms. However, the
results didn’t show any differences between the
comparative algorithms.
In order to further assess the performance of the
proposed components, the proposed GA is compared
with other three algorithms: 1) GA, 2) PSO, and 3)
hybrid GA-PSO, which were recently proposed in
(Gupta et al., 2019).
Table 5: Average error % (E) and average time in seconds
(T) obtained from the proposed GA and other 3 algorithms.
Probs.
GA
PSO
GA-
PSO
Proposed
GA
E
T
E
T
E
T
E
T
ATT48
2.4
0.5
2.8
0.4
0.3
0.4
0.5
0.5
EIL51
2.6
0.6
3.1
0.4
1.2
0.5
1.2
0.5
ST70
4.2
0.9
4.9
0.6
0.8
0.7
0.1
0.7
PR76
2.2
1.2
2.6
0.8
0.7
1.0
0.4
1.6
RD100
4.5
1.8
5.3
1.3
1.6
1.5
0.0
1.5
KROA100
4.0
1.8
4.8
1.3
1.0
1.5
0.1
1.5
KROB100
3.1
1.8
3.7
1.2
1.8
1.5
0.1
1.3
PR107
3.2
2.1
3.8
1.5
1.2
1.7
0.0
1.8
PR124
2.0
2.4
2.4
1.6
0.3
2.1
0.0
2.3
GIL262
6.3
10.0
7.5
7.1
3.0
8.6
0.0
7.3
Average
3.4
2.3
4.1
1.6
1.2
2.0
0.3
1.9
New Designs of k-means Clustering and Crossover Operator for Solving Traveling Salesman Problems using Evolutionary Algorithms
129

Table 5 showed that the GA version with the
proposed components can achieve a higher average
error from the optimal solution than other
comparative algorithms for the first three (small)
TSPs. However, starting from the fourth problem, the
proposed GA achieved the best average error
compared with others. This indicates that the
proposed components are more suitable to solve TSPs
with large sizes. The average values showed that the
proposed GA can achieve better average errors by
92.55%, 93.70%, and 78.18% than GA, PSO, and
hybrid GA-PSO, respectively.
Moreover, the detailed results of the proposed GA
and other comparative algorithms are shown in Table
1 in the Appendix, which can be accessed from
https://github.com/IsmailMAli/TSP-Results. In
Table 1, the results of 10 TSPs with different number
of cities, mean values, average error (%), and average
computational time in seconds, are given.
5 CONCLUSION AND FUTURE
WORK
In this paper, a new design that uses the -means
clustering as a repairing method for the initial
population of an EA, and a new crossover strategy for
TSPs, are proposed. The -means clustering
repairing method is applied directly after the initial
population is generated to enhance the quality of the
solutions. The crossover is designed to generate
offspring from the current individuals taking in
account the characteristics of the TSP. The
experimental results showed that these proposed
components can significantly improve the
performance of EAs, while solving TSPs and are very
promising especially when dealing with large TSPs.
In the future, more complex discrete problems,
such as resource constrained project scheduling
problems (RCPSPs) and traveling thief problems
(TTPs), will be used to test the effectiveness of the
proposed components while solving such problems.
REFERENCES
Ali, IM, Elsayed, SM, Ray, T & Sarker, RA. Memetic
algorithm for solving resource constrained project
scheduling problems. Evolutionary Computation
(CEC), 2015 IEEE Congress on, 2015. IEEE, 2761-
2767.
Bäck, T, Fogel, DB & Michalewicz, Z 2018. Evolutionary
computation 1: Basic algorithms and operators, CRC
press.
Deng, Y, Liu, Y & Zhou, D 2015. An improved genetic
algorithm with initial population strategy for symmetric
TSP. Mathematical Problems in Engineering, 2015.
Evans, J 2017. Optimization algorithms for networks and
graphs, Routledge.
Gupta, IK, Shakil, S & Shakil, S. A Hybrid GA-PSO
Algorithm to Solve Traveling Salesman Problem. 2019
Singapore. Springer Singapore, 453-462.
Jünger, M, Reinelt, G & Rinaldi, G 1995. The traveling
salesman problem. Handbooks in operations research
and management science, 7, 225-330.
Lo, K-M, Yi, W-Y, Wong, P-K, Leung, K-S, Leung, Y &
Mak, S-T 2018. A genetic algorithm with new local
operators for multiple traveling salesman problems.
International Journal of Computational Intelligence
Systems, 11, 1, 692-705.
Mavrovouniotis, M, Müller, FM & Yang, S 2017. Ant
colony optimization with local search for dynamic
traveling salesman problems. IEEE transactions on
cybernetics, 47, 7, 1743-1756.
Miller, DL & Pekny, JF 1991. Exact solution of large
asymmetric traveling salesman problems. Science, 251,
4995, 754-761.
Osaba, E, Yang, X-S, Diaz, F, Lopez-Garcia, P &
Carballedo, R 2016. An improved discrete bat
algorithm for symmetric and asymmetric traveling
salesman problems. Engineering Applications of
Artificial Intelligence, 48, 59-71.
Reinelt, G 1991. TSPLIB—A traveling salesman problem
library. ORSA journal on computing, 3, 4, 376-384.
Savelsbergh, MW 1985. Local search in routing problems
with time windows. Annals of Operations research, 4,
1, 285-305.
Wang, X & Xu, G 2011. Hybrid differential evolution
algorithm for traveling salesman problem. Procedia
Engineering, 15, 2716-2720.
Wei, H, Hao, Z, Huang, H, Li, G & Chen, Q. A Real
Adjacency Matrix-Coded Differential Evolution
Algorithm for Traveling Salesman Problems. Bio-
Inspired Computing-Theories and Applications, 2016.
Springer, 135-140.
Woolson, R 2007. Wilcoxon signed ‐ rank test. Wiley
encyclopedia of clinical trials, 1-3.
ECTA 2019 - 11th International Conference on Evolutionary Computation Theory and Applications
130
