
A Knowledge Chunk Reuse Support Tool
based on Heterogeneous Ontologies
Takeshi Morita
1 a
, Naoya Takahashi
2
, Mizuki Kosuda
1
and Takahira Yamaguchi
1
1
Faculty of Science and Technology, Keio University, Yokohama, Japan
2
Graduate School of Science and Technology, Keio University, Yokohama, Japan
Keywords:
Ontology, Knowledge Chunk, Teaching Assistant Robot.
Abstract:
To develop service robot applications, it is necessary to acquire domain expert knowledge and develop the
applications based on the knowledge. However, since, currently, many of these applications have been devel-
oped by engineers using the middleware for robots, the domain expert knowledge is embedded in the codes
and is difficult to reuse. Therefore, it is considered necessary to have a tool that supports the development of
the applications based on machine-readable knowledge of domain experts. We also believe that the machine-
readable knowledge can be reused not only for service robots but also for novices in the domain. To address
the problems, this paper proposes a knowledge chunk (KC) reuse support tool based on heterogeneous ontolo-
gies. In this study, the parts of the reusable workflow, indexes required for a search, and a movie recording
of robots movement based on the parts of the workflow are collectively known as a KC. Using the framework
of case-based reasoning, the proposed tool accumulates parts of reusable workflows as case examples based
on heterogeneous ontologies and facilitates search and reuse of KCs. It promotes domain expert knowledge
acquisition and supports novices to learn the knowledge. As a case study, we have applied the proposed tool to
teaching assistant (TA) robots. Two public elementary school teachers created workflows for TA robots using
the proposed tool, and each teacher conducted a lesson with TA robots once. Through questionnaires given to
the teacher, the proposed tool and TA robot application were evaluated to confirm their usefulness.
1 INTRODUCTION
In recent years, the development of service robot ap-
plications has attracted considerable attention in the
service industry. To develop service robot applica-
tions, it is necessary to acquire domain expert knowl-
edge and develop the applications based on the knowl-
edge. However, since, currently, many of these appli-
cations have been developed by engineers using the
middleware for robots such as Robot Operating Sys-
tem (ROS)
1
, the domain expert knowledge is embed-
ded in the codes and is difficult to reuse.
Therefore, it is considered necessary to have a
platform that supports the development of service
robot applications based on machine-readable knowl-
edge of domain experts using ontologies, workflows,
rules, etc. It is also considered that the machine-
readable knowledge of domain experts can be reused
not only for service robots but also for novices in the
a
https://orcid.org/0000-0001-8963-2562
1
http://www.ros.org/
domain. In the model of skill acquisition proposed by
(Dreyfus et al., 1986), learners acquire skills through
five distinct stages: novice, advanced beginner, com-
petence, proficient, and expert. From this point of
view, we believe that the platform should be able to
support the novice and advanced beginner’s learning
by reusing the knowledge of the proficient and expert.
Based on this, we have been engaged in the study
and development of PRINTEPS (Yamaguchi, 2015),
an AI and service robot application development plat-
form. In the PRINTEPS, users can develop appli-
cations based on ontologies, workflows, and rules,
and these machine-readable knowledge can be shared
and reused. So far, we have applied this platform to
teaching assistant (TA) robots at multiple elementary
schools as case studies (Morita et al., 2018).
PRINTEPS provides a scenario editor to describe
the workflows for robots’ actions and human-robot in-
teractions, and helps develop service robot applica-
tions that are executable on ROS. The scenario editor
has several separate transverse lanes allocated to the
corresponding agent of implementation, consisting of
Morita, T., Takahashi, N., Kosuda, M. and Yamaguchi, T.
A Knowledge Chunk Reuse Support Tool based on Heterogeneous Ontologies.
DOI: 10.5220/0008067002170224
In Proceedings of the 11th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2019), pages 217-224
ISBN: 978-989-758-382-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
217
actors and tools, so that implementation procedures
can be defined for each lane. With the scenario ed-
itor, workflows can be created while simultaneously
overviewing the interaction between actors.
The scenario editor enables the developer to create
workflows while reusing the entire workflows or indi-
vidual operation processes; however, since end users
such as domain experts usually do not know functions
and properties of robots, it is difficult to identify and
modify the reusable parts to suit the purposes of reuse
when reusing the entire workflows. In contrast, it is
also difficult to work out different combinations of
operation processes when reusing the individual op-
eration processes.
To address problems associated with workflow
creation and reuse of processes using the PRINT-
EPS scenario editor, this paper proposes a knowledge
chunk (KC) reuse support tool based on heteroge-
neous ontologies. Using the framework of case-based
reasoning (Kolodner, 1997), the proposed tool accu-
mulates parts of reusable workflows as case exam-
ples based on heterogeneous ontologies and facilitates
search and reuse of KCs. It promotes domain expert
knowledge acquisition and supports novices to learn
and reuse the knowledge.
As a case study, we have applied the proposed tool
to TA robots. Based on the workflows of TA robots
given to several elementary schools, we created on-
tologies of teacher knowledge (teaching materials and
methods), robot, and KCs and then established a KC
base (KCB) based on these heterogeneous ontologies.
Two public elementary school teachers created work-
flows for TA robots using the proposed tool, and each
teacher conducted a lesson about a science learning
unit “movement of pendulum” with TA robots once.
Through questionnaires given to the teachers, the pro-
posed tool and TA robot application were evaluated to
confirm their usefulness.
2 KNOWLEDGE CHUNK REUSE
SUPPORT TOOL
In this section, we explain the overview of the knowl-
edge chunk (KC) reuse support tool based on htero-
geneous ontologies. A chunk is defined on page
12 of reference (Tulving and Craik, 2000) as a fa-
miliar collection of more elementary units that have
been interassociated and stored in memory repeat-
edly and that act as a coherent, integrated group when
retrieved. In this study, the parts of the reusable
workflow, indexes required for a search, and a movie
recording of robots movement based on the parts of
the workflow are collectively known as a KC. The
!"#$%&"'(
)*"'&+,-+.
/01*$.23(+
)*"'&+,-+.
/01*$."*4"&"-5
677&8/348"*.
9":38*.;*4"&"-5
<"2"4
;*4"&"-5
=">8+
)*"'&+,-+./01*$.
(+3#/0.3*,.#+1(+.
%1*/48"*
?<@ABC?D
(/+*3#8".+,84"#.
D+3#/0
<+1(+
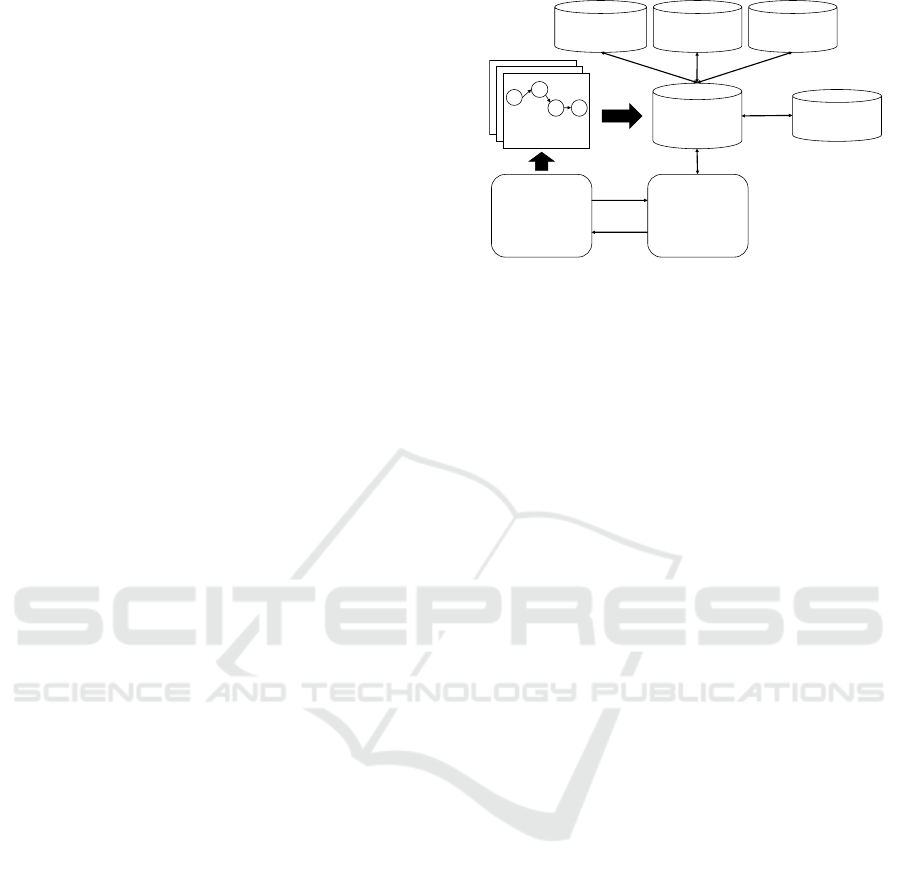
Figure 1: The system overview of the proposed tool.
database storing the KCs is called the KCB.
Fig. 1. shows the system overview of the proposed
tool. Using the framework of case-based reasoning,
the proposed tool accumulates KCs as case exam-
ples based on application domain ontology, robot on-
tology, and KC ontology to facilitate the search and
reuse of KCs from the viewpoints of promoting ap-
plication domain knowledge acquisition and robot uti-
lization. The proposed tool was implemented by ex-
panding the PRINTEPS scenario editor.
The steps to reuse KCs using the proposed tool are
as follows. Developers first create application domain
ontologies by interviewing domain experts. Then, the
part of the workflow corresponding to the KC is ex-
tracted, and the corresponding part of the movie is
edited out. Based on the KC ontology, the developers
create instances of KC classes and assign IDs to re-
lated operation processes, links to movies, and search
indexes based on the application domain ontology.
The user of the proposed tool can search the KCB us-
ing the search index created based on the application
domain ontology and the robot ontology from the sce-
nario editor. A list of KCs matching the search condi-
tions will be displayed, and the selected KC that one
wants to reuse is inserted in the scenario editor so that
the user can edit the inserted workflow and reuse it
afterward.
Currently, the proposed tool only supports end
users to search and reuse of the knowledge chunk.
The ontologies and knowledge chunk are manually
created and stored by the developers.
3 ONTOLOGIES
3.1 Overview
The KCB is built based on the application do-
main, robot, and KC ontologies. These ontologies
were built in the form of web ontology language
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
218
(OWL)
2
using the Ontology Editor Prot ´eg ´e
3
. We
have defined 661 axioms, 26 classes, 10 properties,
and 83 individuals in these ontologies.
3.2 Application Domain Ontologies
Application domain ontologies organize concepts and
relationships for target application domains. As this
study conducts lessons with teaching assistant (TA)
robots as a case study, teaching material and method
ontologies consisting of systematized teacher knowl-
edge were created as application domain ontologies.
3.2.1 Teaching Material Ontology
The teaching material ontology organizes teaching
material knowledge related to learning units of each
subject based on the school curriculum guidelines set
by the Ministry of Education, Culture, Sports, Sci-
ence, and Technology (MEXT). Fig. 2. shows the
class hierarchy and part of the instances of teaching
material ontology. We defined the “Learning unit”
class as the root class and the “Learning unit” class
of each subject (such as “Science learning unit” class)
as the subclass of the root class. We also defined the
field learning unit class as a subclass of each subject
learning unit, such as the “Learning unit of dynam-
ics field” class. Each defined class contains learning
units that are taught such as “Regularity of a lever”
and “Movement of pendulum.”
This study selected an elementary school science
lesson as a case study and therefore created teaching
material ontology referring to “Content Classification
of Science” of “Explanatory Manual of Elementary
School Curriculum Guideline for Science Courses”
provided by the MEXT.
3.2.2 Teaching Method Ontology
The teaching method ontology organizes the config-
uration for promoting teaching methods, such as its
introduction and summary. Fig. 3. shows class hierar-
chy and part of the instances of the teaching method
ontology. We defined the “Teaching method” class
as the root class and the teaching method class for
each subject as the subclass of the root class. In addi-
tion, we also defined the “Subject-independent teach-
ing method” class that was common to all subjects, in
which instances as “Starting and introducing the les-
son” and “Summarizing and ending the lesson” were
defined.
2
https://www.w3.org/OWL/
3
https://protege.stanford.edu/
!"#$%"&'#()*($+'(,-'%."/"0(1"/$,(&2%##
32%##(+/'.%.&+4()*($+'($'%&+/"0(5%$'./%2()"$)2)04
! !"#$%&%'()%&*
! +,&"%," -"#$%&%'()%&*
! !"#$%&%' )%&* ./ 0&.-.'1 /&"-2
! !"#$%&%'()%&*(./(,3"4&5*$1(/&"-2
! !"#$%&%' )%&* ./ 21%#4&,5 /&"-2
! !"#$%&%'()%&*(./("-",*$&,&*1(#%2(4#'%"*&54(/&"-2
! !"#$%&%' )%&* ./ '".5,&"%," /&"-2
! !"#$%&%'()%&*(./(6#7"(4.*&.%(/&"-2
! +.,&#- 5*)2&"5(-"#$%&%'()%&*
! 8&$*3(./(#%&4#-5
! 9.$4#*&.% #%2 ,3#%'" ./ -#%2
! :-.0#-(6#$4&%'
! ;.7"4"%* ./ <"%2)-)4
! =$.<"$*&"5(./(-&'3*
! >"')-#$&*1 ./(#(-"7"$
Figure 2: Class hierarchy and part of the instances of teach-
ing material ontology.
!"#$%"&'#()*($+'(,-'%&+."/(0'$+)1,(&2%##
32%##(+.'4%4&+5()*($+'($'%&+."/(0'$+)1()"$)2)/5
! !"#$%&'()*"+%,-
! ./01"$+2&'-"3"'-"'+ +"#$%&'( *"+%,-
! !"#$%&'()*"+%,-)4,5)6$&"'$"
! !"#$%&'()*"+%,-)4,5)6,$)6+/-&"6
! 85"#+&,'),4)%93,+%"6&6)#'-)":3"5&*"'+)-"6&('
! ;:3"5&*"'+ #'- <"5&4&$#+&,'
! ='+5,-/$+&,'),4)7"#5'&'()/'&+
! >#&' $,'+"'+ ,4 +%" 7"66,'
! ?5"3#5#+&,' ,4 ":#*&'#+&,' @/"6+&,'6
! .+#5+&'()#'-)&'+5,-/$&'()+%")7"66,'
! ./**#5&A&'( #'- "'-&'( +%" 7"66,'
Figure 3: Class hierarchy and part of the instances of teach-
ing method ontology.
The study defines instances of the “Teaching
method for science” class based on the guide issued
by the MEXT, which is used by the teachers that took
part in the case study.
3.3 Robot Ontology
The robot ontology organizes the functions of a robot
and interactions between robots and people (in this
case, teachers and pupils). From the results of the
questionnaires given to the pupils and teachers on the
lessons with TA robots in our previous case studies,
it can be concluded that a lesson workflow in which
there are interactions between teachers and robots or
between robots and pupils, rather than a lesson work-
flow in which lessons are given only in one direc-
tion from the teacher or robot to the pupils, leads to a
higher evaluation score by the teachers and pupils.
Fig. 4. shows the class hierarchy and part of the
instances of the robot ontology. In the robot ontol-
ogy, the “Use of robot” class was defined as the root
class and the “Use of robot involving interaction” and
“Use of robot having received favorable responses”
A Knowledge Chunk Reuse Support Tool based on Heterogeneous Ontologies
219
!"#$%"&'#()*($+'(,-#'()*(.)/)$,(&0%##
10%##(+2'.%.&+3()*($+'(.)/)$()"$)0)43
! !"#$%&$'%(%)
! !"#$%&$'%(%)$*+,-./$+0)1+223$'#0#-,#4$
&+,%'+(2#$'#"5%."#"
! !"#$%&$'%(%)$-.,%2,-./$-.)#'+0)-%.
! 655'%+0*$&'%7$515-2"$)%$'%(%)"
! 655'%+0*$&'%7$'%(%)"$)%$515-2"
! 655'%+0*$&'%7$'%(%)"$)%$)#+0*#'"
! 655'%+0*$&'%7$)#+0*#'"$)%$'%(%)"
! 8'#+)-%.$%&$+$&##2-./$)*+)$)*#$'%(%)$-"$
,%21.)+'-23$4%-./$"%7#)*-./$&%'$)*#7
! 9%(%):"$"1552#7#.)+'3$#;52+.+)-%.$%.$
)#+0*#':"$'#7+'<"
! =5##0*$+><>+'423$4#2-,#'#4$(3$)*#$'%(%)
! ?#22$)*#$515-2"$)*#$")+')$+.4$#.4
Figure 4: Class hierarchy and part of the instances of robot
ontology.
Table 1: Properties of the knowledge chunk ontology.
Property name Domain Range
learningUnit Knowledge chunk Learning unit
teachingMethod Knowledge chunk Teaching method
robotUsage Process Use of robot
hasProcess Knowledge chunk Process
processId Process String
chunkFile Knowledge chunk String
chunkMovie Knowledge chunk String
classes were defined as the subclasses. From the pre-
vious workflows, the interactions between robots and
humans were extracted, and then only the workflows
which pupils showed favorable responses were named
and defined as instances for each class, including “Ap-
proach from robots to pupils.”
3.4 Knowledge Chunk Ontology
The KC ontology organizes the relationship between
the processes constituting the KC and application do-
main ontologies. Fig. 5. shows KC classes and the
instances used in the KC ontology. The “Knowl-
edge chunk” class and “Process” class were defined
as classes for the KC ontology. KCs are defined as
instances of the “Knowledge chunk” class. The pro-
cesses of the PRINTEPS scenario editor are defined
as instances of the “Process” class.
Table 1 lists the properties of the KC ontology.
The “learningUnit” and “teachingMethod” are prop-
erties connecting KC to target learning unit and teach-
ing method. The “robotUsage” is a property connect-
ing process to target use of robot. The “hasProcess”
is a property connecting KC to the process related to
use of robot. The “processId” is a property indicating
the ID of the relevant process in the scenario editor.
!"#$%"&'#()*($+'(,-")./'01'(&+2"3,(&/%##
4/%##(+5'6%6&+7()*($+'(3")./'01'(&+2"3()"$)/)17
! !"#$%&'(&)*+,"-
! ./#*&00
! 10-)2#)3'&"2345)*#"'323#"0)4#/)'&2&/63"3"()2+&)
7&"',%,6)*5*%&
! 8,2)9)*9//#2
! :;7%9"923#")#4)9*3')/93"),03"()7+#2#0
! :;7%9"923#")#4)0,7&/)257+##"),03"()<#'5)6#=&6&"20
! >/&&23"(0)*#6<3"&')$32+)7/&*9,23#"0)#")/#<#2)%&00#"0
! >,3'&)2#)6&90,/&6&"2)&;7&/36&"2)#4)7&"',%,6)*5*%&)
,03"()?9*#@
! A9=&)7,73%0)'&<92&)#")&"&/(5)*#"=&/03#"
! .&77&/)(3=&0)9)7#02&')"#23*&)B,3C
! D&=3&$)#4)$+92)$90)%&9/"&')9<#,2)2+&)7&"',%,6)*5*%&
! D+52+63*)7&"',%,6
! E&=&%#76&"2)2#)&%&*2/3*)&"&/(5
Figure 5: Knowledge chunk classes and instances of the
knowledge chunk ontology.
The “chankFile” is a property connecting KC to cor-
responding chunk file including process set that con-
figures KC, its connection relation, and related mod-
ule information used in those processes.
For teachers who do not know robots, since it is
difficult to create a clear picture of robot movements
by just referring to the workflow and reading the text,
we prepared the “chunkMovie” property that con-
nected the KCs with the corresponding movie files.
We also aimed to encourage the reuse of KCs by al-
lowing the teachers to learn from effective ways of the
movies, which are difficult to pick up without experi-
ence. These ways are including dealing with pupils’
responses or pausing the interaction with the robot.
Because “learningUnit” and “teachingMethod”
are properties that are dependent on each application
domain, it is necessary to define object properties cor-
responding to their respective application domain on-
tologies when using the proposed tool for different ap-
plication domains.
4 KNOWLEDGE CHUNK
SEARCH AND REUSE
4.1 Knowledge Chunk Base
The KCB was created based on the application do-
main, robot, and KC ontologies. Fig. 6. shows an
example of the KCB. In Fig. 6., the name, descrip-
tion, learning unit, teaching method, chunk file name,
movie file name, and use and process of a robot are
defined for the instance “Rhythm pendulum” of the
“Knowledge chunk” class.
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
220

!"#$"%&'()*+,-.-%
!"#$"%&'()*+,-.-%
/,012.34*.
5..671($"*()-)&.1($6($6-'"($"*(
)*+,-.-%(0/**.#(7"&.*(.&1$*+&+8($6(
16%*(%-1&'(3+,(319($"*%($6(%3$'"(
/,012'6%%*+$
/"#$"%)*+,-.-%:;16+
'"-+9<&.*
/"#$"%)*+,-.-%:%)=
'"-+9>6?&*
>6?*%*+$(60(
)*+,-.-%
@5A(1)*391B
>3&+('6+$*+$(60(
$"*(.*116+
C/*)3/3$&6+(60(
*D3%&+3$&6+(E-*1$&6+1
.*3/+&+8F+&$
$*3'"&+8>*$"6,
G*..($"*()-)&.1($"*(
1$3/$(3+,(*+,
"31C/6'*11
/646$F138*
Figure 6: An example of KCB.
4.2 Knowledge Chunk Search
4.2.1 Search Query of Knowledge Chunks
Listing 1: Source codes of knowledge chunk search query.
1 SELECT DISTINCT ?s ?name ?description ?file ?
movie
2 WHERE {
3 ?s rdfs:label ?name ;
4 rdfs:comment ?description ;
5 ec:chunkFile ?file ;
6 ec:chunkMovie ?movie ;
7 ec:hasProcess ?process .
8 {
9 ?s ec:learningUnit ?unit .
10 ?unit rdf:type ?selectedUnit .
11 } UNION {
12 ?s ec:learningUnit ?selectedUnit .
13 }
14 {
15 ?s ec:teachingMethod ?method .
16 ?method rdf:type ?selectedMethod .
17 } UNION {
18 ?s ec:teachingMethod ?selectedMethod .
19 }
20 {
21 ?process ec:robotUsage ?usage .
22 ?usage rdf:type ?selectedUsage .
23 } UNION {
24 ?process ec:robotUsage ?selectedUsage .
25 }
26 }
The source codes of the KC search query written
in SPARQL
4
are shown in Listing 1. The KC search
query obtains a list of learning units selected by the
user, the teaching method, the KC name (?name) as-
sociated with the instance in the use of the robot class,
the description (?description), KC files (?file), and
movie file passes. These are displayed in a spec-
ified format as the search result of the KC search
screen shown in Section 4.2.2. In the positions de-
scribed as ?selectedUnit, ?selectedMethod, and ?se-
lectedUsage of Listing 1, the instances of the learning
unit, teaching method, and use of robot classes that
4
https://www.w3.org/TR/sparql11-overview/
have been selected by the user on the search screen
are assigned.
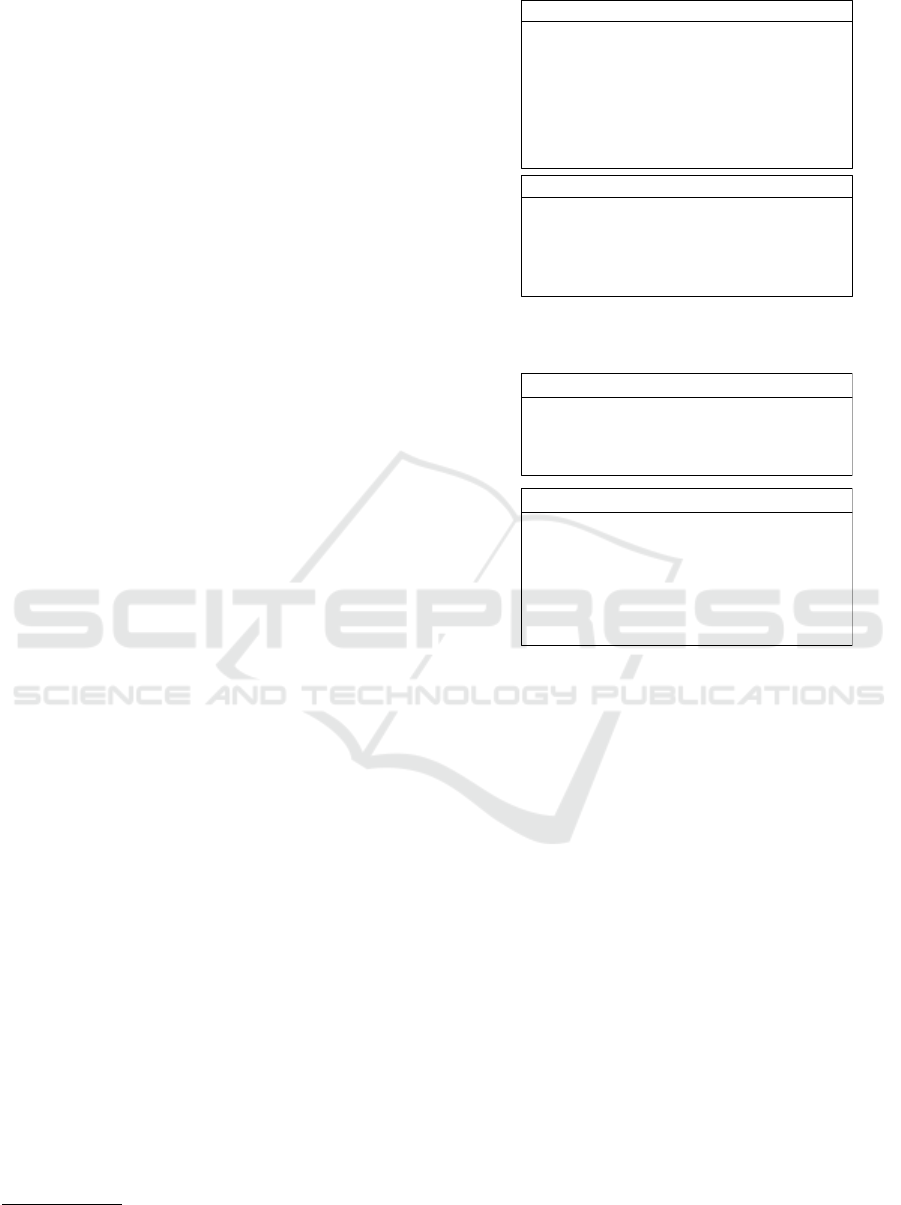
4.2.2 Knowledge Chunk Search Screen
Fig. 7. shows the KC search screen, which can be
called from the scenario editor. First, a category of the
KCB is selected from the category pulldown menu.
Then, the setting file for the selected KCB category is
read, and the items set as the search condition are dis-
played on the search screen (“Leaning unit,” “Teach-
ing method,” and “Use of robot,” as shown in Fig. 7.).
From the first pulldown menu of each search condi-
tion, any subclass just below the root class of the on-
tology corresponding to the search condition can be
selected. For example, learning unit classes such as
the “Science learning unit” class can be selected using
the learning unit search condition. After the first pull-
down menu is selected, the second pulldown menu
can then be used to select a list of subclasses of the
selected class. Upon reaching the leaf class, a list of
instances of the selected class will be displayed in the
last pulldown menu.
Once the search button is pressed, the search re-
sults will be displayed. The types of instances are
inferred by the class hierarchies, and all instances of
the knowlege chunk related to the selected class are
obtained and displayed. After confirming the content
of the KC by replaying the movie, the users can insert
the workflow corresponding to the KC into the sce-
nario editor being created. Fig. 8. shows a screenshot
of the workflow of “Rhythmic pendulum”. If a user
selects the “Rhythmic pendulum” KC, the workflow
shown in Fig. 8. is inserted into the scenario editor.
Then, the user can reuse and edit the part of the work-
flow.
If intermediate classes other than the leaf class or
its instances are selected, not only the instances of the
selected class but also all instances belonging to its
subclasses are included in the search target.
5 CASE STUDY
5.1 Overview
To evaluate the proposed tool, lessons with TA robots
were conducted at an elementary school, in coopera-
tion with two teachers in charge of Class 1 and 4 of
the 5th grade. The two teachers had no experience in
programming and development of robot applications,
and this was their first time conducting lessons with
TA robots.
A Knowledge Chunk Reuse Support Tool based on Heterogeneous Ontologies
221
!""#$%&'()&*+*,"%&'#&'#+-(&'()&*)./+"+0&
12))"3&$(,")&",%').,.4&'#&%#0)&0+%,-&5./&
5%6&'()0&'#&05'-(&'()&0#7)0).'&'()&
*)./+"+0&$,'(&'()&2(3'(0&'()&0+%,-&
8),.4&*"53)/9
:)52-(
;5.-)"
<.%)2'
=(3'(0,-&*)./+"+0
=)"5')/&",.6%
>%)&2#8#'
;(+.6 %)52-(
;5')4#23?
@)%%#.&$,'(&A!&2#8#'%
@)52.,.4&+.,'
A)5-(,.4&0)'(#/
:-,).-)&")52.,.4&+.,'&
@)52.,.4&+.,'&1#2&/3.50,-%&1,)"/
B#7)0).'&*)./+"+0
A)5-(,.4&0)'(#/&1#2&%-,).-)
<.'2#/+-',#.&")52.,.4&+.,'&
C5**2#5-(&'#&.5'+25"&*().#0).#.D
Figure 7: Knowledge chunk search screen.
!"#$%"&
'()*+,
-./
0*,)+#1
!"#$%&'&()$*+,+-
.'#/&+$/#,&/0)&/)'10)"&
/2+10)3&/0)&0)'*&24&567
.'#/&+$/#,&/0)&/)'10)"&
/2+10)3&/0)&0)'*&24&567
8")('")&42"&/0)&)9()"#-)$/
567&3':3&;-+3#1&3/'"/<;
=2+$*&'$&',)"/#$%&32+$*
=2+$*&'$&',)"/#$%&32+$*
8,':&/0)&3()1#4#)*&32$%&
>0#,)&12+$/#$%&*2>$
?#@)&'$&2@)"@#)>&24&
/0)&"0:/0-#1&()$*+,+-
A$3/"+1/&(+(#,3&/2&(")('")&
42"&/0)&)9()"#-)$/
63B&/0)&-+3#1&
3/'"&/2&567
Figure 8: A screenshot of the workflow of “Rhythmic pen-
dulum”.
The content of the lessons given to both classes
was the introduction of “Pendulum movement of the
science unit.” For both classes, “what determines the
time necessary for a pendulum to make a single recip-
rocal motion” is set as the specific learning task to be
attained at the end of the lesson.
TA robots applications were developed to conduct
a lesson using the proposed tool; each teacher gave
the lesson with TA robots once to each class. The
proposed tool and the TA robots were evaluated by
the questionnaires given to the teachers .
5.2 Creation of Knowledge Chunk Base
In this case study, the KCB was created based on
the experience obtained from previously conducted
lessons with TA robots. In this process, 11 KCs
were extracted considering that there are different
uses of the robot that are unique to each KC (the in-
stances of the “Knowledge chunk” class as shown in
Fig. 5). The movies corresponding to the KCs were
also edited in such a way that the movie scenes de-
!"#$%&'()*
+,-
.,/-0 1%2*3435
67)%%2
138#4
9(8$'8
:%(7"%);<=*%<>
1%2*3435
1%2*3435
1%2*3435 1%2*3435
1%2*3435 1%2*3435
1%2*3435 1%2*3435
Figure 9: Lesson environment of case study.
Figure 10: A Photograph from an actual lesson.
picting only knowledge transmission, practical opera-
tions, etc. were removed to make the running time in
the range of 1 minute to 1 minute 30 seconds; com-
ments were added as required. These measures aimed
to shorten the time required by teachers to understand
the content of the KC and allow them to follow the
entire flow of the KC in a short time.
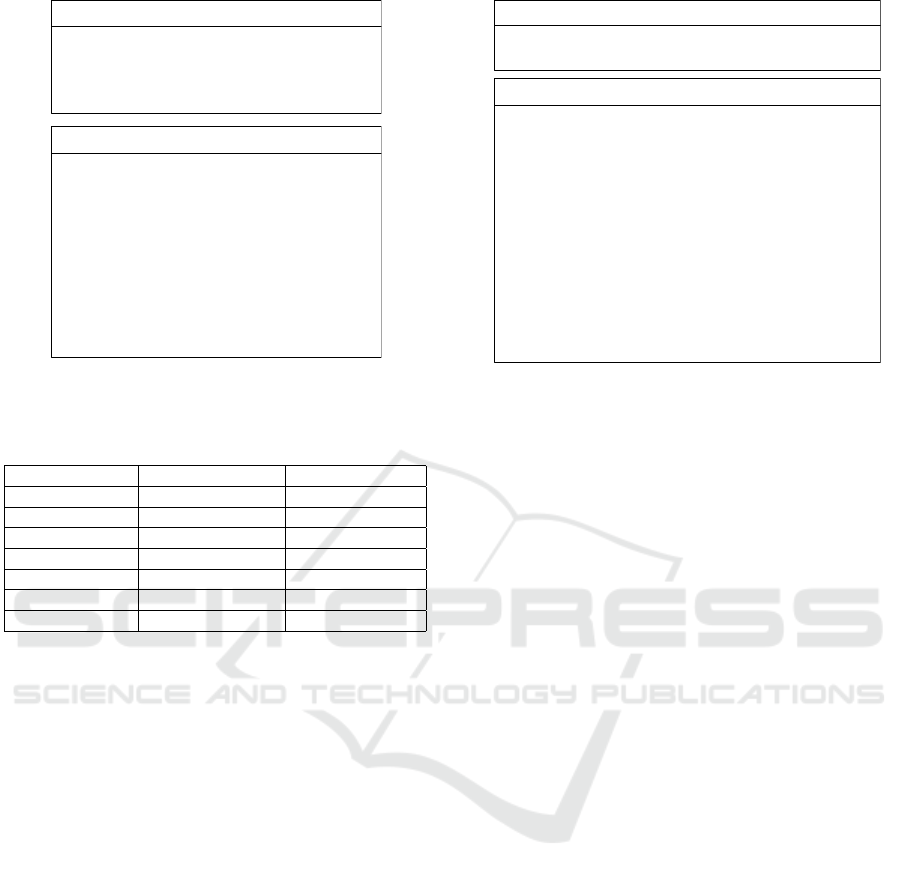
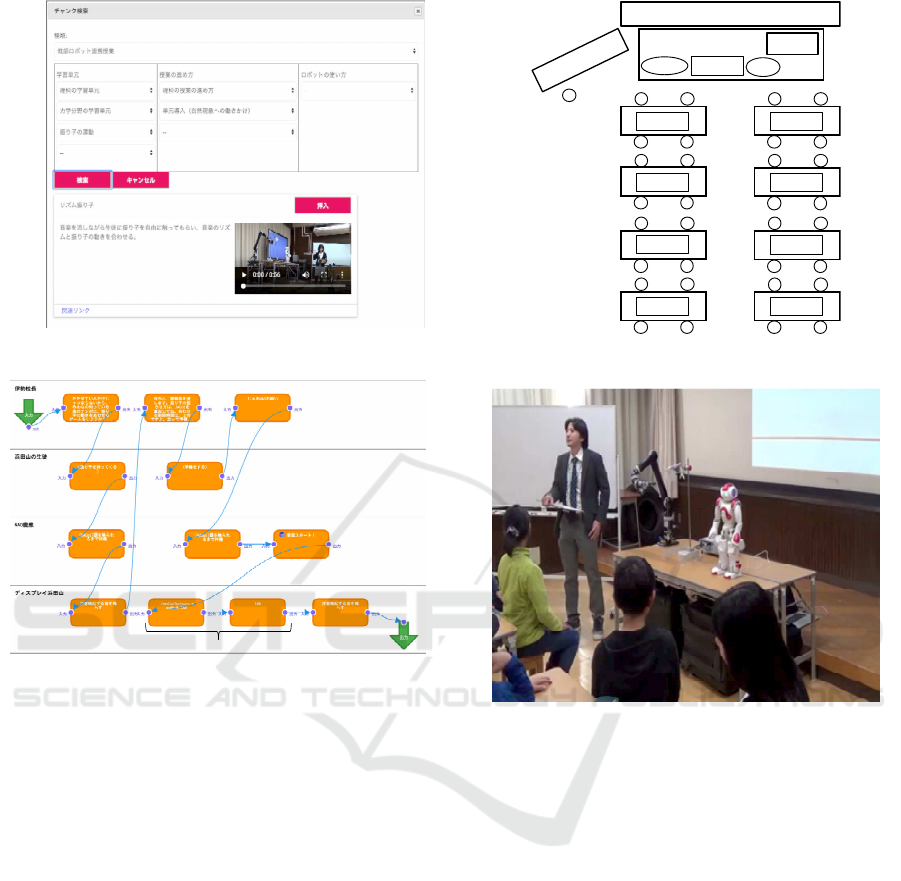
5.3 Lesson Environment
Fig. 9. and Fig. 10. show the lesson environment and
a photograph from a lesson. Because it was neces-
sary to set up the robots and desks on the day before
the class and the teachers needed to rehearse the les-
son, an audiovisual room was used considering class-
room availability and other factors. NAO, which is
a humanoid robot developed by Aldebaran Robotics,
and JACO2, which is an arm type robot developed by
Kinova, were arranged on the teacher’s desk as TA
robots. NAO works with teachers to enhance pupils’
interest and understanding in the lesson. JACO2 puts
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
222

a weight on a pendulum and demonstrates swinging
the weight. Eight tables were so arranged such that
four pupils were at each table and each group could
easily perform the swinging pendulum experiment.
5.4 Creation of Workflows for TA
Robots
After the teachers learnt how to use the PRINTEPS
scenario editor, they began to create workflows for TA
robots on January 2019. They spent approximately
two to three hours per session, requiring three ses-
sions in total to complete the workflow.
At the time of the first workflow creation, they de-
veloped the entire lesson flow using the conventional
scenario editor without using the KC search function.
In the second session, a detailed workflow was cre-
ated while referring to the use of the robot with the
KC search function. In addition, during on the same
day as the second session, an introductory lesson us-
ing NAO was given to the pupils to remove the barrier
between pupils and the robots by introducing them to
the robot functions, such as speech recognition and
age estimation based on facial images. In the third
session, which took place a day before the lesson with
TA robots, final adjustments were made through a re-
hearsal.
5.5 Reuse of Knowledge Chunks
In the case study, three KCs (“Greetings combined
with precautions on robot lessons”, “Rhythmic pen-
dulum”, and “Pepper gives a posted notice quiz”)
were reused by the teachers with the help of the pro-
posed tool from the viewpoint of teaching material
creation and use of a robot. Here, we would like to
introduce the knowledge chunk of “Rhythmic pendu-
lum”.
The rhythmic pendulum is a standard lesson
taught at the elementary school that is intended to
generate in the pupils mind a question concerning the
change of cycle by allowing them to match the move-
ment of the pendulum with the rhythm of the mu-
sic being played within a certain time limit. In this
KC, NAO gives a signal to start and stop the rhyth-
mic movement of the pendulum and replay the music.
Interactions were added to the workflow of Class 1,
including those in which pupils ask NAO to turn on
the music they want to listen to through NAOs speech
recognition system; however, NAO rejects their re-
quest saying that it is in no mood to do that and then
proceeds to tell them what it wants to listen to and
succeeds in getting their approval. An interaction was
also added to the workflow of Class 4, in which NAO
directly talks to a pupil who is always slow to get
prepared to listen to what the teacher says before the
teacher starts explaining the rhythmic pendulum.
6 EVALUATION
We evaluated our system by asking the two teachers
to complete a questionnaire on the reuse of teacher
knowledge, use of robot, and user interface.
Regarding the reuse of teacher knowledge, com-
ments such as “While it has the benefit of preventing
to make the same mistake, there are also fears that too
much dependence would hinder creativity and lead to
a rigid teaching system” were made.
On the utilization of robots, teachers had the view
that, “We were able to know in advance about typi-
cal cases that people who interact with a robot for the
first time would experience and could use that knowl-
edge to plan the classes” and “There is a clear need
for further research on the timing to use KC search
function.”
Their comments on the user interface included, “It
is convenient to be able to find desired class scenes by
narrowing down the categories and using a combina-
tion of categories.” and “It was easy to use because it
was organized for each related item, but there seemed
to be room to subdivide the items.”
It can be concluded from the above that it is neces-
sary to clarify the process of workflow where each KC
should be used and allow developers to dynamically
change the degree of detail, priority, and organization
of KC search items to suit the teacher’s knowledge
level.
7 RELATED WORK
Many visual programming tools have been proposed
to support the creation of robot applications (Pot et al.,
2009; Alexandrova et al., 2015; Huang and Cak-
mak, 2017). Although many of these tools support
a flow diagram representation and functional compo-
nent search, it does not have the function to define the
semantics of the combination of components based
on application domain knowledge and use of robot
knowledge, and make them reusable.
As a related work on the scenario design sys-
tem for learning and teaching based on ontologies,
SMARTIES has been proposed (Hayashi et al., 2009).
In SMARTIES, the design intent of scenarios can be
saved by creating a learning and teaching scenario
based on the learning support theory, OMNIBUS
A Knowledge Chunk Reuse Support Tool based on Heterogeneous Ontologies
223

(hereafter called OMNIBUS ontology). From the per-
spective of knowledge reuse, (Hayashi et al., 2009)
mainly makes knowledge on methods reusable. Addi-
tionally, when the teacher uses SMARTIES to create a
learning and teaching scenario, SMARTIES proposes
the knowledge on methods applicable to an I L event
(concept for defining the relation between teaching
and learning) based on OMNIBUS ontology. This is
intended to support the design and reuse the learning
and teaching scenarios based on learning and teaching
theories.
The subject of this study is lessons with TA robots,
and not ordinary lessons administered solely by teach-
ers. Therefore, it aims to reduce the teachers’ bur-
den of creating workflows by creating knowledge and
workflows that are mainly related to the use of robots,
about which ordinary teachers, being non-experts on
robotics, do not know much, reusable in the form of
KC using the framework of case-based reasoning.
8 CONCLUSION
This paper proposed a knowledge chunk (KC) reuse
support tool based on heterogeneous ontologies to
solve issues associated with the creation and reuse of
workflows using the scenario editor in PRINTEPS.
Based on the workflows of lessons with TA robots
given to several elementary schools, we created on-
tologies of teacher knowledge (teaching materials and
methods), robots, and KCs. Then, we established the
KCB based on these ontologies. Two public elemen-
tary school teachers created workflows for TA robots
using the proposed tool, and each teacher conducted
a lesson about a science learning unit “movement of
pendulum” with TA robots once. The proposed tool
and TA robot application were evaluated through the
questionnaires given to the teachers to confirm their
usefulness.
In a future study, it is necessary to clarify in which
process of the workflow creation should each KC be
used and help the users know the suitable time to per-
form a search. It is also necessary to make it possi-
ble to dynamically change the degree of detail, prior-
ity, and organization of KC search items to suit the
teacher’s knowledge level. In addition, the functions
of PRINTEPS must be extended in a future work so
that more flexible questions and answers, as well as
conversations, can be exchanged by incorporating a
more accurate speech recognition system and such
mechanisms as general ontologies, rule-based system,
and spoken dialogue system.
ACKNOWLEDGEMENTS
This study was supported by the project of “A Frame-
work PRINTEPS to Develop Practical Artificial In-
telligence,” (JPMJCR14E3) the Core Research for
Evolutional Science and Technology (CREST) of the
Japan Science and Technology Agency (JST).
REFERENCES
Alexandrova, S., Tatlock, Z., and Cakmak, M. (2015).
Roboflow: A flow-based visual programming lan-
guage for mobile manipulation tasks. In 2015 IEEE
International Conference on Robotics and Automation
(ICRA), pages 5537–5544.
Dreyfus, H. L., Dreyfus, S. E., and Athanasiou, T. (1986).
Mind over Machine: The Power of Human Intuition
and Expertise in the Era of the Computer. The Free
Press, New York, NY, USA.
Hayashi, Y., Bourdeau, J., and Mizoguchi, R. (2009). Using
ontological engineering to organize learning/instruc-
tional theories and build a theory-aware authoring sys-
tem. Int. J. Artif. Intell. Ed., 19(2):211–252.
Huang, J. and Cakmak, M. (2017). Code3: A sys-
tem for end-to-end programming of mobile manip-
ulator robots for novices and experts. In 2017
12th ACM/IEEE International Conference on Human-
Robot Interaction (HRI, pages 453–462.
Kolodner, J. (1997). Educational implications of analogy: A
view from case-based reasoning. The American psy-
chologist, 52:57–66.
Morita, T., Akashiba, S., Nishimoto, C., Takahashi, N.,
Kukihara, R., Kuwayama, M., and Yamaguchi, T.
(2018). A practical teacher–robot collaboration les-
son application based on printeps. The Review of So-
cionetwork Strategies, 12(1):97–126.
Pot, E., Monceaux, J., Gelin, R., and Maisonnier, B. (2009).
Choregraphe: a graphical tool for humanoid robot
programming. In RO-MAN 2009 - The 18th IEEE In-
ternational Symposium on Robot and Human Interac-
tive Communication, pages 46–51. IEEE.
Tulving, E. and Craik, F. (2000). The Oxford Handbook of
Memory. Oxford University Press.
Yamaguchi, T. (2015). A platform printeps to develop prac-
tical intelligent applications. In Adjunct Proceedings
of the 2015 ACM International Joint Conference on
Pervasive and Ubiquitous Computing and Proceed-
ings of the 2015 ACM International Symposium on
Wearable Computers, UbiComp/ISWC’15 Adjunct,
pages 919–920. ACM.
KEOD 2019 - 11th International Conference on Knowledge Engineering and Ontology Development
224
