
Sampling Frequency Evaluation on Recurrent Neural Networks
Architectures for IoT Real-time Fall Detection Devices
F. Luna-Perejon
a
, J. Civit-Masot
b
, L. Mu
˜
noz-Saavedra, L. Duran-Lopez,
I. Amaya-Rodriguez, J. P. Dominguez-Morales
c
, S. Vicente-Diaz
d
, A. Linares-Barranco
e
,
A. Civit-Balcells
f
and M. J. Dominguez-Morales
g
Robotics and Computer Technology Lab., University of Seville, Seville 41012, Spain
Keywords:
Fall Detection, Recurrent Neural Network, Deep Learning, Internet of Things.
Abstract:
Falls are one of the most frequent causes of injuries in elderly people. Wearable Fall Detection Systems
provided a ubiquitous tool for monitoring and alert when these events happen. Recurrent Neural Networks
(RNN) are algorithms that demonstrates a great accuracy in some problems analyzing sequential inputs, such
as temporal signal values. However, their computational complexity are an obstacle for the implementation
in IoT devices. This work shows a performance analysis of a set of RNN architectures when trained with
data obtained using different sampling frequencies. These architectures were trained to detect both fall and
fall hazards by using accelerometers and were tested with 10-fold cross validation, using the F1-score metric.
The results obtained show that sampling with a frequency of 25Hz does not affect the effectiveness, based
on the F1-score, which implies a substantial increase in the performance in terms of computational cost. The
architectures with two RNN layers and without a first dense layer had slightly better results than the smallest
architectures. In future works, the best architectures obtained will be integrated in an IoT solution to determine
the effectiveness empirically.
1 INTRODUCTION
Approximately 28%-35% of elderly people, over 65
years old, suffer at least one unintentional fall per year
(Organization et al., 2008). Major injuries can pro-
voke temporal o permanent disabilities, even death.
Regarding to this risk, the early assistant is consid-
ered a relevant factor (Noury et al., 2007). Due to
the increase in the population of the affected cohort
(Werner, 2011), this issue is increasingly relevant.
For an early assistance, Fall Detection Systems
(FDS) can be a crucial tool as they allow us to mon-
itor the user and quickly alert health centers which
they are connected with, when a fall or some risk
events are detected. Among all the different FDS
types, wearable devices allow a continuous monitor-
a
https://orcid.org/0000-0002-4352-8759
b
https://orcid.org/0000-0003-3306-3537
c
https://orcid.org/0000-0002-5474-107X
d
https://orcid.org/0000-0001-9466-485X
e
https://orcid.org/0000-0002-6056-740X
f
https://orcid.org/0000-0001-8733-1811
g
https://orcid.org/0000-0001-5669-9111
ing without dependence to the environment. Due to
the need to be portable and with great autonomy, these
systems not only should be effective distinguishing
between falls and activity of daily living, but also
have low computational cost in order to be imple-
mented in IoT devices with low-power consumption
requirements. Recurrent Neural Networks (RNN)
have shown to be very effective algorithms to ana-
lyze sequences of values (Lipton et al., 2015; Aceto
et al., 2019; de Jes
´
us Rubio, 2009). Due to previ-
ous studies(Musci et al., 2018; Luna-Perejon et al.,
2019), these RNN architectures has demonstrated to
detect falls with acceptable results. However, such
Deep Learning algorithms are computationally com-
plex, which affects energy consumption and execu-
tion time, disadvantages that can make its implemen-
tation in IoT devices not viable (Torti et al., 2018).
In this context, the present work shows the per-
formance results obtained when the best architectures
from (Luna-Perejon et al., 2019) are trained with a
smaller width of input data, by reducing the sampling
frequency down to 25Hz.
The rest of the paper is structured as follows: Sec-
tion 2 presents the basics of RNN layers used, the
536
Luna-Perejon, F., Civit-Masot, J., Muñoz-Saavedra, L., Duran-Lopez, L., Amaya-Rodriguez, I., Dominguez-Morales, J., Vicente-Diaz, S., Linares-Barranco, A., Civit-Balcells, A. and
Dominguez-Morales, M.
Sampling Frequency Evaluation on Recurrent Neural Networks Architectures for IoT Real-time Fall Detection Devices.
DOI: 10.5220/0008494805360541
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 536-541
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
dataset structure, the RNN architectures tested in this
study and the evaluation metrics. Then, Section 3
presents the results and discussion over the obtained
values. Finally, Section 4 shows the conclusions.
2 MATERIAL AND METHODS
The tests carried out in this study aim to analyze
the performance of different RNN architectures when
working with a lower output width, that is, less
amount of samples per classification.
2.1 Gated Recurrent Neural Networks
The original RNN model emerged as an ANN-based
way to attack classification problems related with se-
quential data with a strong dependence on the order
of values. This made them suitable for temporal sig-
nals. However, its application field was very limited
due to the influence of the vanishing gradient problem
(Hochreiter, 1998). This effect means that the gradi-
ent that is propagated back through the network either
decays or grows exponentially. As a consequence, tra-
ditional RNNs are hard to train using backpropagation
through time (Williams and Zipser, 1995). Gated Re-
current Neural Networks have been one of the most
effective solutions to this problem to date. They intro-
duce some memory-like cells in the architecture that
hold information separated from the rest of the neu-
ral network. The information is managed through a
set of gates. During the training of the network, the
cells learn to close or open their gates according to the
relevance of the information that comes from the se-
quence and the information currently stored. This in-
formation is used in the learning process of the RNN.
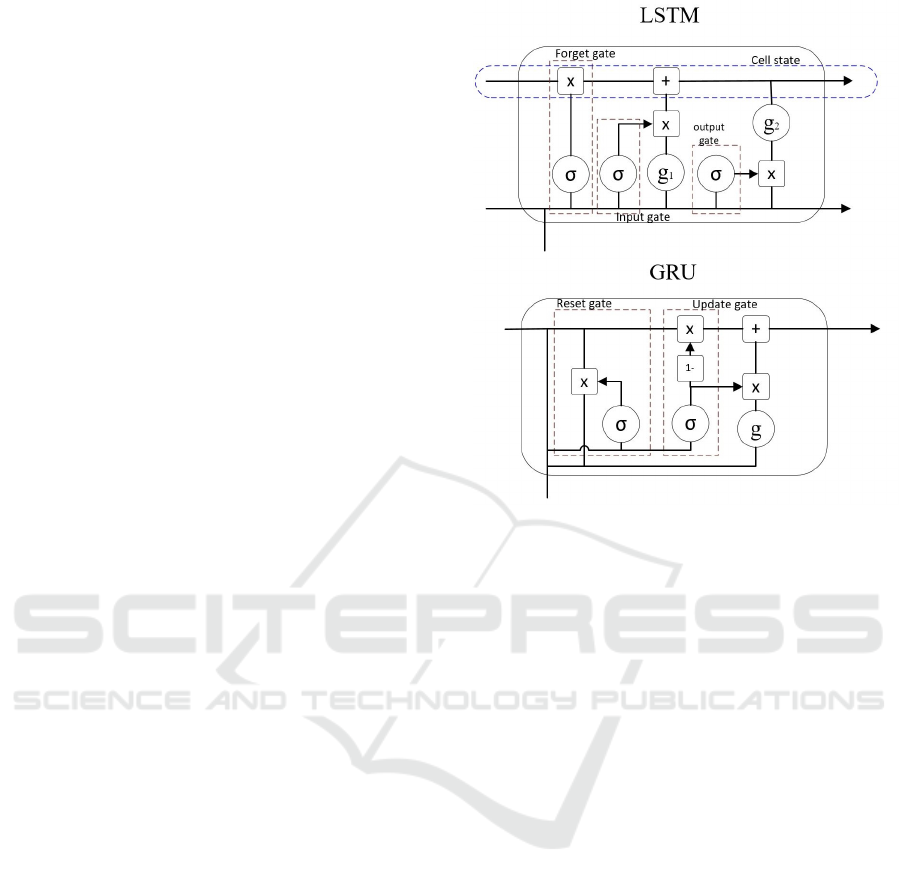
Long Short-Term Memory (LSTM) units
(Hochreiter and Schmidhuber, 1997) were the first
proposed Gated RNN. They contain three gates,
two of which evaluate the update of the information
stored, and the last gate controls what information is
provided to the RNN in each step. Gated Recurrent
Units (GRU) (Cho et al., 2014) are more recent cells
similar to LSTM, that lack of the last gate mentioned
so that the whole information stored is used during
the entire execution. Both alternatives have shown to
be similarly effective (Chung et al., 2014), although
GRUs are slightly more economical in terms of
computation cost.
2.2 Dataset
We used the SisFall dataset (Sucerquia et al., 2017),
consisting of a set of activities performed by users and
Figure 1: LSTM and GRU cells. First contains three gates,
while the second have only two.
registered using a device with accelerometers, fixed to
their waist. This set includes activities of daily living
(ADL) and falls, acquired at 200 Hertzs. To adapt
the dataset to this kind of algorithms, each recording
was segmented with a fixed number of samples, called
”width” from now on. They were classified using the
criteria proposed by (Musci et al., 2018) and consider-
ing three classes: Fall, Alert and Background (BKG),
that is, a fall event, a fall hazard status and the rest (an
ADL or inactivity after the fall). Each recording was
segmented with a width of 256 and a stride of 128.
2.3 Methodology
For a more robust result, a 10-fold cross validation
was carried out. The subsets were created randomly
by users, so that the data of each user was contained in
a unique fold. Additionally, the distribution of adult
and elderly users in each subset was done in such a
way that a balance was obtained looking for an equi-
table distribution.
2.3.1 RNN Architectures
The RNN architectures considered in this work were
the ones proposed in a previous study (Luna-Perejon
et al., 2019) but only those that have batch normal-
ization 3, due to the great improvement in the effec-
tiveness with almost no repercussion on the compu-
tational complexity. The smallest architecture consist
Sampling Frequency Evaluation on Recurrent Neural Networks Architectures for IoT Real-time Fall Detection Devices
537
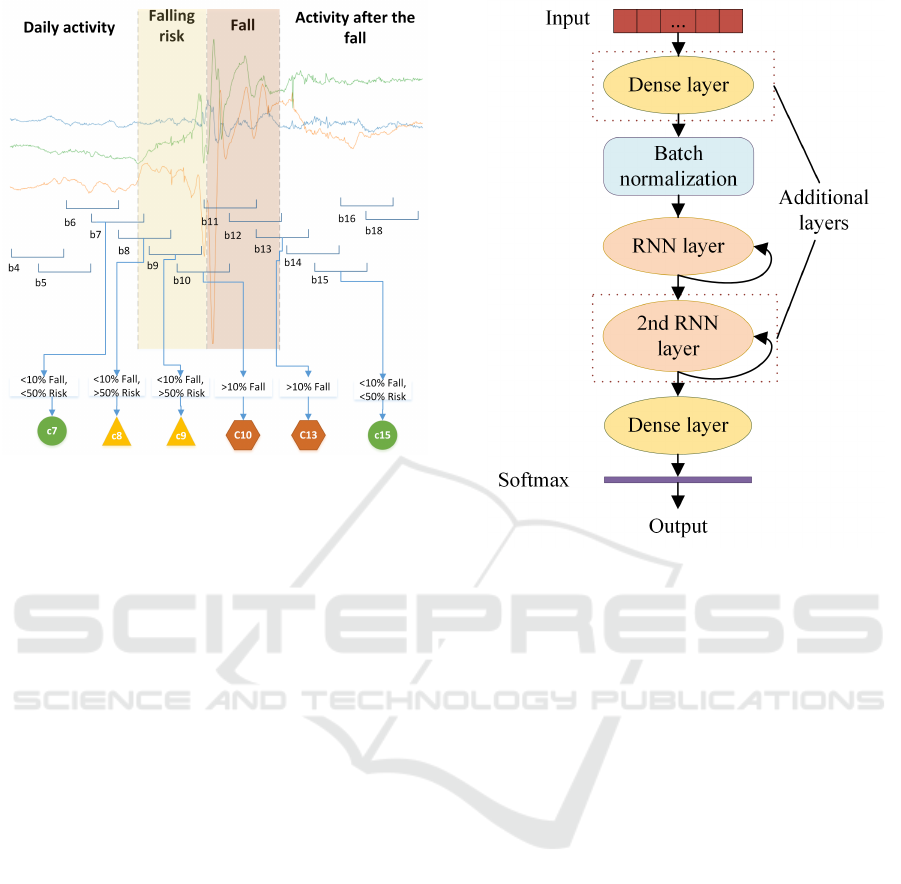
Figure 2: Recording segmentation and labeling process.
of batch normalization, a RNN layer and dense layer
as output. The other architectures contain addition-
ally a first dense layer, a second RNN layer previous
to the final layer, or both. We tested all the architec-
tures with the two types of RNN layers introduced in
2.1, that is, LSTM and GRU. It should be noted that
the RNN used are non-bidirectional.
To analyze the performance of these architectures
with a lower width, the sampling frequency of the
dataset was reduced. This was done artificially by
subtracting the even elements of each sample. In this
way, we obtain the dataset equivalent to 100Hz from
that at 200Hz, we get that one at 50Hz from 100Hz,
and same to get it at 25Hz. The widths of the inputs
were 256, 128, 64 and 32 samples, respectively. Each
architecture was trained and validated with all the out-
put widths.
The hyperparameters used to train all the models
were a learning rate of 0.001 and a batch size of 32.
Dropout were not applied. We used Adam as opti-
mizer, hyperbolic tangent as activation function and
sigmoid as recurrent activation in RNN layers. Fi-
nally, we used the weighted loss function proposed
by (Musci et al., 2018).
2.3.2 Metrics
The dataset used is highly unbalanced, therefore the
overall classification accuracy is not an appropri-
ate way to measure the effectiveness of the system.
We compared the effectiveness employing the macro
and micro F1-scores (Sokolova and Lapalme, 2009)
for each class and average, that measures the rela-
Figure 3: Scheme representing all architectures trained in
the study, differentiated between them by having none, one
or both of the highlighted layers.
tions between data’s positive labels and those given
by a classifier through a combination of (micro or
macro, respectively) precision and recall. The com-
putational complexity were estimated with the num-
ber of parameters that has each architecture and the
averaged execution time during the training. We used
a graphic processor unit NVIDIA GTX 1080 Ti and
the CuDNN versions of this RNN layers provided
implemented in the framework Keras, so the results
were substantially lower that expected in IoT devices.
Therefore, we show a comparison of the acceleration
with respect to the trained architecture with greater
execution time.
3 RESULTS AND DISCUSSION
The resulting dataset was unbalanced due to the short
duration of fall and risk events. Table 1 shows the
distribution for each fold in cross validation.
The results showed similar F1-score (macro) re-
sults (Figure 4), for both mean and standard devia-
tion. The aspect of greater relevance is that with a
lower sampling rate and with a lower number of in-
puts, the effectiveness of the algorithm does not seem
to decrease; in fact, it seems to grow. These re-
sults suggests that it is possible to reduce substantially
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
538
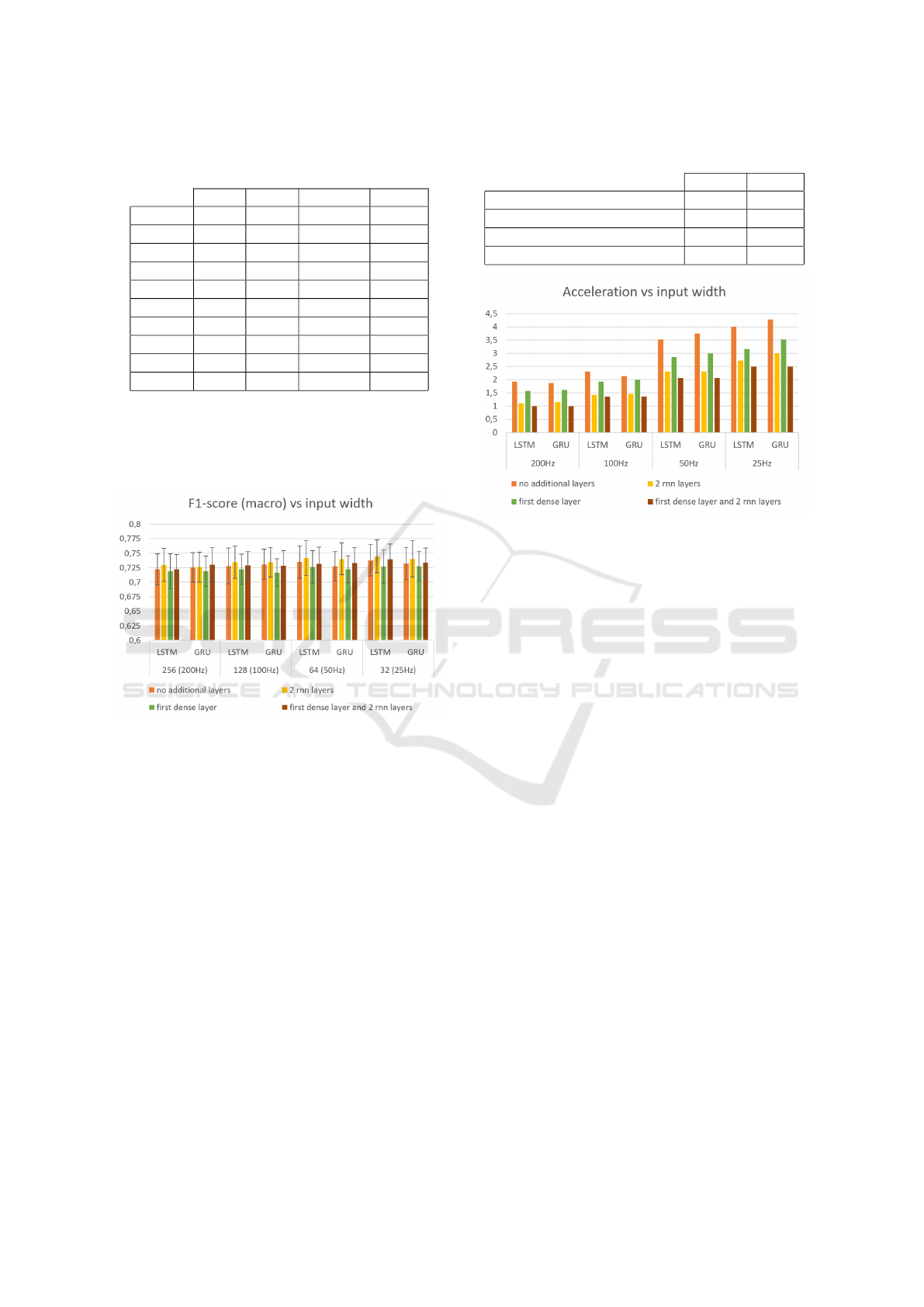
Table 1: Dataset distribution in each fold for cross valida-
tion.
Total BKG ALERT FALL
fold 1 9485 9010 151 324
fold 2 9485 9057 90 338
fold 3 9485 9074 92 319
fold 4 9485 9025 85 375
fold 5 9330 8887 123 320
fold 6 9441 9011 94 336
fold 7 9892 9424 144 324
fold 8 9485 9044 93 348
fold 9 9486 9067 102 317
fold 10 9093 8574 198 321
the computational cost of running this architectures
without reducing the effectiveness, and facilitating the
task of monitoring in real time using microcontrollers
for IoT systems.
Figure 4: Macro f1-score results for each architecture and
different frequency sampling. These values consist of the
mean with the 10 folds for cross validation together the stan-
dard deviation.
Certain trained models had slightly better results
in F1-score. Overall, the architectures without a first
dense layer showed a best effectiveness. This is an
indicator that the relationship of the values over time
is a much more relevant that between the three axes
of the accelerometer. The architectures with a sec-
ond recurrent layer showed a slightly higher effective-
ness. However, the number of parameters that these
versions contain makes the computational complexity
much greater in relation to architectures without this
layer. This can make its implementation in IoT de-
vices not viable for a real time monitorization. The
architecture with highest execution time contained a
first dense layer and two LSTM layers, and output
width of 256. It was 0.78 milliseconds. The figure
5 shows the acceleration of the different architectures
in relation with the slowest. Reducing the frequency
to 25Hz, the execution times are reduced by 4.
Table 2: Number of parameters of each architecture.
LSTM GRU
Without additional layers 4847 3663
With a second RNN layer 13295 9999
With a first dense layer 8803 6691
With both additional layers 17251 13027
Figure 5: Acceleration in relation with the slowest architec-
ture.
The Figure 6 shows high values for macro recall.
This metric is also called sensitivity and, in multi-
class problems, is equivalent to the weighted accu-
racy, that is, the average, over all the classes, of the
fraction of correct predictions in this class. That indi-
cates these algorithms have a very good ratio of true
positives with respect of true positives plus false neg-
atives for each class. The low value in F1-score is,
therefore, due to the low precision of the algorithm,
specifically in the class ALERT, below to 0.30. This
is probably caused by the scarcity of the data and the
variety of values for this class. However, we consider
the study of this kind of events interesting in order to
detect falling risk and prevent falls. For this, it will be
necessary to record and label more data.
The values of these metrics seem not to be affected
by the reduction in the number of samples over time.
These results are promising, since it implies that a
high sampling frequency is not necessary to maintain
the effectiveness of these models. Therefore, the de-
vice where the trained model was integrated would
require fewer microcontroller performance, in terms
of sampling and processing speed. In addition, en-
ergy consumption would also be reduced, increasing
the hours of portable use.
Micro F1-score (Figure 7) are much greater in
comparison to macro score. This fact is due to micro
precision and accuracy are calculated by combining
the absolute successes and failures of all the classes
so that the large number of hits in the BKG class hide
the results for the other two classes.
Sampling Frequency Evaluation on Recurrent Neural Networks Architectures for IoT Real-time Fall Detection Devices
539

Figure 6: F1-score results for each architecture and differ-
ent frequency sampling. These values consist of the mean
with the 10 folds for cross validation together the standard
deviation. In multi-class problems, this metric is equivalent
to the weighted accuracy.
Figure 7: Micro F1-score results for each architecture and
different frequency sampling. These values consist of the
mean with the 10 folds for cross validation together the stan-
dard deviation. Although the results for this metric is very
high, it is not representative of the reality of the problem,
while the proportion of samples for the background class is
much greater than that of the other classes.
4 CONCLUSIONS
The RNN architectures assessed seems to be effective
to detect falls even with a small sample rate, without
need of increment the acquisition time to obtain more
samples as outputs. These results provide a ray of
light to the possibility of executing these algorithms
in microcontrollers. In future works we will carry out
the integration of the best architectures in an IoT solu-
tion. The use of RNN architectures to the detection of
such events is still recent. Other avenues of research
may involve using additional biometric signals, such
as heartbeat or galvanic skin response. The location
of the device in other parts of the body, such as the
wrist, must also be studied with these algorithms. In
the same way, the adjustment of the training and ac-
tivation parameters of each layer can also be investi-
gated to increase the effectiveness.
ACKNOWLEDGEMENTS
This work is supported by the Spanish government
grant (with support from the European Regional De-
velopment Fund) COFNET (TEC2016-77785-P). F.
Luna and I. Amaya are supported by the Empleo Ju-
venil with support from EU.
REFERENCES
Aceto, G., Ciuonzo, D., Montieri, A., and Pescap
´
e, A.
(2019). Mobile encrypted traffic classification us-
ing deep learning: Experimental evaluation, lessons
learned, and challenges. IEEE Transactions on Net-
work and Service Management.
Cho, K., Van Merri
¨
enboer, B., Bahdanau, D., and Bengio,
Y. (2014). On the properties of neural machine trans-
lation: Encoder-decoder approaches. arXiv preprint
arXiv:1409.1259.
Chung, J., Gulcehre, C., Cho, K., and Bengio, Y.
(2014). Empirical evaluation of gated recurrent neu-
ral networks on sequence modeling. arXiv preprint
arXiv:1412.3555.
de Jes
´
us Rubio, J. (2009). Sofmls: online self-organizing
fuzzy modified least-squares network. IEEE Transac-
tions on Fuzzy Systems, 17(6):1296–1309.
Hochreiter, S. (1998). The vanishing gradient problem dur-
ing learning recurrent neural nets and problem solu-
tions. International Journal of Uncertainty, Fuzziness
and Knowledge-Based Systems, 6(02):107–116.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Lipton, Z. C., Berkowitz, J., and Elkan, C. (2015). A crit-
ical review of recurrent neural networks for sequence
learning. arXiv preprint arXiv:1506.00019.
Luna-Perejon, F., Civit-Masot, J., Amaya-Rodriguez, I.,
Duran-Lopez, L., Dominguez-Morales, J. P., Civit-
Balcells, A., and Linares-Barranco, A. (2019). An
automated fall detection system using recurrent neu-
ral networks. In Conference on Artificial Intelligence
in Medicine in Europe, pages 36–41. Springer.
Musci, M., De Martini, D., Blago, N., Facchinetti,
T., and Piastra, M. (2018). Online fall detection
using recurrent neural networks. arXiv preprint
arXiv:1804.04976.
Noury, N., Fleury, A., Rumeau, P., Bourke, A., Laighin,
G., Rialle, V., and Lundy, J. (2007). Fall detection-
principles and methods. In Engineering in Medicine
and Biology Society, 2007. EMBS 2007. 29th Annual
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
540

International Conference of the IEEE, pages 1663–
1666. IEEE.
Organization, W. H. et al. (2008). Ageing; life course unit.
who global report on falls prevention in older age.
World Health Organization.
Sokolova, M. and Lapalme, G. (2009). A systematic analy-
sis of performance measures for classification tasks.
Information Processing & Management, 45(4):427–
437.
Sucerquia, A., L
´
opez, J. D., and Vargas-Bonilla, J. F.
(2017). Sisfall: A fall and movement dataset. Sen-
sors, 17(1):198.
Torti, E., Fontanella, A., Musci, M., Blago, N., Pau, D.,
Leporati, F., and Piastra, M. (2018). Embedded real-
time fall detection with deep learning on wearable de-
vices. In 2018 21st Euromicro Conference on Digital
System Design (DSD), pages 405–412. IEEE.
Werner, C. (2011). The older population: 2010. us census
bureau.
Williams, R. J. and Zipser, D. (1995). Gradient-based learn-
ing algorithms for recurrent networks and their com-
putational complexity. Backpropagation: Theory, ar-
chitectures, and applications, 1:433–486.
Sampling Frequency Evaluation on Recurrent Neural Networks Architectures for IoT Real-time Fall Detection Devices
541
