
Investigation of Selection Mechanism of Friction Models in
Multibody Systems
Qian Jing
1, a
, Ning Mi
1
1
School of Mechanical Engineering, Long dong University, Qing Yang 745000, China
Keywords: Friction model, Multibody system, Joints; Dynamics, Adams.
Abstract: In order to research the influence of the different friction models on the frictional characteristics and the
dynamic response of the multibody system with different kinds of joints, eleven different kinds of friction
models were used in three different specified scenarios. Firstly, each friction model is simply introduced,
and its friction characteristics are illustrated. In addition, in order to test the physical properties of these
friction models, there are two different scenarios: (i) multibody system with revolute joint; (ii) multibody
system with revolute joint and prismatic joint simultaneously. Secondly, when these friction models are
applied in the scenarios, the comparison analysis between with friction phenomenon model and without
friction phenomenon model is implemented, which is validated by the commercial software ADAMS.
Finally, the simulation shows that the type of joint in the multibody system has a significant effect on the
selection mechanism of these friction models. Namely, this investigation provides a reference method for
choosing the friction model that is the best suitable for the above two different scenarios according to the
computational efficiency and position stability.
1 INTRODUCTION
Friction model is a set of mathematical model used
to calculate the friction and to explain the
mechanism of friction in motion. In general, in order
to use differential equations to describe friction
phenomena, the friction model can be divided into
two types, namely, static friction model and dynamic
friction model (Awrejcewicz Jan, Fečkan Michal,
Olejnik Pawel, 2005), and the basis of improvement
for the static friction model is the Coulomb friction
model (Coulomb P.C.A). The Coulomb model states
that the direction of friction is opposite to the
relative velocity on the contact areas. The magnitude
of the friction is independent of the magnitude of the
relative velocity, but it is proportional to the
magnitude of the normal load. The Coulomb friction
model can be regarded as a description of
macroscopic friction phenomenon, this is mainly
because the effect of dynamic friction is only
considered in relative motion. Hence, the Coulomb
friction model implied a lot of microscopic
phenomena of friction such as a static friction,
Stribeck friction, pre-slip, and viscous sliding are not
considered. Therefore, when the relative velocity
approaches zero, the discontinuity of the friction will
inevitably lead to discontinuity in the solution of
dynamics in the multibody system, which lead to the
result divergent and inaccurate(Armstrong-Hélouvry
B., Canudas Dewit, C, 1995). In fact, the change of
friction in motion must be a continuous process. It
has been proved by a lot of experiments that the
magnitude of friction is closely related to the
magnitude of velocity when the velocity approaches
zero (F. S., A X, Cieszka, et al, 2010). When the
relative velocity approaches zero, the reference (F.
S., A X, Cieszka, et al, 1990; Berger Ej, 2002) based
on a number of experiments pointed out that the
magnitude of friction is simultaneously related to the
static friction coefficient and the dynamic friction
coefficient. If the external tangential force is less
than the static friction, the motion is viscous, and if
the external tangential force is greater than the static
friction force, the motion is sliding. ‘Stribeck effect’
is a micro-description of the excessive states
between viscous and sliding, and it is a great
improvement for the Column model in describing
the frictional mechanism. The degree of agreement
with the experimental data of the friction model can
be greatly improved based on the accurate
description in viscous and sliding. The discontinuous
piecewise function in the Coulomb friction model
Jing, Q. and Mi, N.
Investigation of Selection Mechanism of Friction Models in Multibody Systems.
DOI: 10.5220/0008873602510260
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 251-260
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
251

can be originally turned into a continuous function,
consequently, the stability of the integrating
processes can be increased. Meanwhile, the
description of ‘ Stribeck effect’ also enhance the
computational accuracy of the dynamics in
multibody systems. How to describe the transition of
viscous and sliding more accurately and solve the
problem of self-excited oscillation and bifurcation
caused by them has become a hot topic in academic
research (Awrejcewicz J, 1998).
In order to solve the problem of the discontinuity
of friction in the Coulomb friction model, the
method of replacing the change curve of the friction
with a specific function has been used in the static
friction model at first when the relative velocity
approached zero (Duan Chengwu, Singh Rajendra,
2006). According to the problem of switching state
equation in friction model, Karnopp put forward the
Karnopp model which create a zero field in a region
of relatively low speed (Karnopp D, 1985). On this
basis, Leine et al (Leine R. I., Campen D. H. Van,
Kraker A. De, et al, 1998) improved the accuracy of
numerical calculation and increased the stability of
the integral process by introducing the definition of
acceleration. Threlfall (Threlfall D. C, 1978)
reduced the discontinuity of friction by using a
system of equations on the basis of the Coulomb
model. Filipe Marques et al (Marques Filipe, Flores
Paulo, Pimenta Claro J. C., et al, 2016) improved the
Threlfall model at the aspect of coefficient’s
improvement and made friction closer to the result
of the Coulomb model when the relative velocity
approaches zero. In order to obtain the ‘Stribeck
effect’, Bengisu and Akay (Bengisu M. T., Akay A,
1994) used two algebraic equations, one of them
describes the sliding and another especially
describes the ‘Stribeck effect’. Awrejcewicz
(Awrejcewicz J, Grzelczyk D, Pyryev Yu, 2009)
refined the stick-slip process and proposed a novel
friction model which is expressed as four equations.
The friction model mentioned above are some static
friction model used in high frequency in the
dynamic calculation of multibody systems in recent
years. In addition, there are many other static
friction models, for example, the Wojewoda et al
model (Wojewoda J, Stefański A, Wiercigroch M, et
al, 2008), the Ambrósio model (Ambrósio Jorge A.C,
2003), the Benson model (Benson David J.,
Hallquist John O, 1990) used in Multi-body system
software COMSOL and the Velocity-based model
used in dynamic simulation software ADAMS and
so on. Dahl firstly put forward the Dahl model (Dahl
P. R, 1968) based on microscopic deformation of
bristle, the relative motion regarded as a deformation
similar to the spring between contact surfaces in the
static stage of the friction was considered for the
first time. Based on the assumption of bristle
deformation, there are still many other models which
also think about the static friction, for instance, the
LuGre model (De Wit C. Canudas, Olsson H,
Astrom K. J, et al, 1995), the Elasto-plastic model
(Dupont P., Armstrong B., Hayward V, 2002), the
Stick-slip model (Cha Ho Young, Choi Juhwan, Han
Sik Ryu, et al, 2011) and the Gonthier model
(Gonthier Yves, Mcphee John, Lange Christian, et al,
2004) and so on. Compared to static friction models,
the most of the dynamic friction models can more
clearly and effectively reflect the friction
characteristics in the movement of the multibody
systems, thus, the more accurate results of the
dynamic analysis can be obtained. However, the
dynamic friction model contains state variables and
involves many parameters. How to determine the
value of each parameter and choose a more effective
step and method of the iteration is very important to
solve the problem as the friction phenomena are
considered in the process of motion in multibody
systems.
The purpose of this study is to analyze the effects
of different friction models on the characteristics in
friction and the results of kinematics analysis in
multibody systems with different kinds of joints.
There are eleven common friction models were
selected as research objects in this paper, in which
the static friction models respectively are the
Smooth Coulomb model, the Threlfall model, the
Bengisu model, the Karnopp model, the Velocity-
based model and the Awrejcewicz model, and the
dynamic friction models respectively are the Dahl
model, the LuGre model, the Elasto-plastic model,
the Stick-slip model and the Gonthier model. Two
typical mechanisms which only contain prismatic
joints and simultaneously contain prismatic joints
and revolute joints respectively are tested, and the
result of dynamics is compared with Adams. The
influence of friction models on the results of
kinematic simulation for different types of
multibody systems is illustrated based on the
computational efficiency and the stability of the
numerical solution of the position. Finally, the
optimal selection method of eleven friction models
for different types of multibody systems is obtained,
which provides a reference for how to more
accurately and effectively solve the dynamic
analysis when the characteristics in friction need to
be considered in the future.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
252

2 STRUCTURE OF THE
INVESTIGATION
This paper is aimed to present and compare several
friction models that can be used in multibody
systems containing different kinds of joints. In order
to obtain the frictional characteristics at low-
speed motion and the accurate solution of the
dynamics in a multibody system, two aspects of
research are mainly done in this paper. In section 3
and section 4, six kinds of static and five kinds of
dynamic friction models commonly used in a lot of
previous literature were concluded respectively and
their algebraic equations were briefly introduced.
The comparison of the ability for describing the four
kinds of friction phenomena is previewed in section
5. In section 6, three types of mechanical systems
that only include prismatic joints, only include
revolute joints and simultaneously include prismatic
joints and revolute joints are selected as the research
objects. In section 7, the influence of the different
friction models on the friction characteristics and
computational dynamics in multibody systems with
different kinds of joints is analyzed according to the
computational efficiency and the stability of
simulation results, and a reference method is
provided for choosing the friction model that is the
best suitable for three different scenarios mentioned
in the preceding section in the end.
3 COMPARISON BETWEEN
FRICTION MODELS
This study takes into account the number of design
parameters, the difficulty of parameter selection and
the calculation efficiency of the friction model. Six
static friction models and five dynamic friction
models are selected for a brief introduction, and the
mathematical equations of friction are listed. The
ability of the description of friction phenomena is a
very important evidence in estimating the
computational accuracy of the friction (Gonthier
Yves, Mcphee John, Lange Christian, et al, 2004),
and the expression of friction model need to be
consistent with actual conditions, which depends on
the number of friction phenomena that can be
accurately described. However, it is impossible to
take all of the influence factors of friction into
account. This paper focuses on four kinds of friction
phenomena, namely, the dynamic friction, the static
friction, the "Stribeck effect" and the pre-sliding,
See Table 1 for contrastive details.
Table 1. Phenomena of friction models.
Name
Dynamic
Friction
Static
Friction
Stribeck
Pre-
sliding
Smooth
Threlfall
Bengisu
Karnopp
Velocity-
based
Awrejcewicz
Dahl
LuGre
Elasto-
plastic
Stick-slip
Gonthier
Where means it can be described, means it
can’t be described. It can be seen from Table 2 that
the dynamic friction model compared with the static
friction model generally reflects the pre-sliding due
to the consideration of the average deformation of
the bristle in the static friction. In addition, when the
four kinds of friction phenomena mentioned above
can be all observed it is necessary to investigate
other friction phenomena for the actual requirement
and select an appropriate friction model according to
the efficiency of calculation and the complexity of
parameters used in the friction model.
4 NUMERICAL EXAMPLES AND
COMPARISON
The advantages and drawbacks of the proposed
friction model have briefly introduced above, and
the specific calculation process is summarized. The
purpose of this study is to analyze the influence of
different friction models on the frictional
characteristics and the results of the kinematic
analysis in the multibody systems with the different
kinds of joints in the case of dry friction. The
mechanisms are the Rabinowicz case, the single
pendulum, and the single pendulum box respectively.
The dynamic simulation of them is carried out and
the results of the analysis are compared with
ADAMS.
4.1 Model with Prismatic Joints
The Rabinowitz case composed of sliders and
springs is a single degree of freedom (DOF) model,
and it is often used to study the viscous and sliding
of friction phenomena in the dynamic test of
multibody systems. After a lot of research and
continuous improvement (Marques Filipe, Flores
Investigation of Selection Mechanism of Friction Models in Multibody Systems
253

Paulo, Pimenta Claro J. C., et al, 2016), the
simplified model structure is shown in Fig. 1.
Fig 1. Diagram of the mechanism.
The belt rotates at a constant speed v in the
Rabinowicz case, and the block moves under the
combined action of friction and the tension of spring.
When the tangential force namely the spring tension
is less than the static friction, the slider is static. At
this time, it should be in the stage of pre-sliding and
static friction. When the tension force of the spring
is greater than the static friction, the friction
decreases with the increase of the relative velocity,
that is “Stribeck effect”. Meanwhile, the block
begins to be in sliding until the tension force of the
spring is less than the static friction again, and the
process of motion begins to cycle. The parameters of
each component in the mechanism are shown in
Table 2, and the reference of the parameters
involved in each model is shown in Table 3. The
curves of the relative displacement, the relative
velocity, the relative acceleration and the friction
with time are respectively drawn in Fig. 2~ Fig. 5.
Fig 2. Relative displacement of the body.
Fig 3. Relative velocity of the body.
Fig 4. Relative acceleration of the body.
Fig 5. Friction of the body.
Table 2. Rabinowicz model parameters.
Name Value Name Value
Mass (m) 0.8 kg
Step size(
t)
l0
-6
s
Belt velocity(v) 0.1m/s Time step(t) 20s
Stiffness coefficient(k) 2.1N/m Integral method Runge-Kutta
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
254

Table 3 Friction model parameters for Rabinowicz case
Name Symbol Value Name Symbol Value
Dynamic friction
coefficient
u
d
0.1 Damping coefficient
1
190Ns/m
Static friction coefficient u
s
0.15 Adhesion coefficient
2
0 Ns/m
Velocity error v
d
10
-3
m/s Breakaway displacement z
b
a
10
-7
m
Stribeck velocity v
st
r
10
-3
m/s Maximum deformation z
max
10
-6
m
Stiffness coefficient
0
10
5
N/m Dwell-time constant
dw
0.1
From Fig.2~ Fig.5 it can be seen that when the
Coulomb model, the Threlfall model, and the Dahl
model is adopted for the Rabinowicz case, the
dynamic characteristics and the friction of slider in
the mechanism with only prismatic joints are very
similar, and the most of friction phenomena cannot
be found except the dynamic friction. Nevertheless,
the other models show the obvious process of the
viscous and sliding. The differences of
characteristics of the motion in the Rabinowicz case
with different friction models gradually increase
with time, which is mainly caused by the difference
of parameters contained in each friction model and
the accumulated error generated by the iterative
process. The integral adopts the ode15s that are
applicable to the dynamic friction model for the
Runge-Kutta method and the absolute error is 10-8.
Table 5 lists the calculation time used for each
model. In order to select the friction model that
satisfies the requirements of the frictional
characteristics in actual conditions, the stability of
the positional solution of each model is calculated
by the equation (1), and the friction model that can
meet the specific phenomenon in friction is sorted
by the efficiency (t) and stability (s). The results are
shown in Table 5, in which J stands for the static
friction, S stands for the "stribeck effect", and Y
stands for the pre-sliding.
2
1,2,3,...,11
1
ii
i
i
xx
si
n
(1)
Where xi represents the solution of position,
i
x
represents the average value of the position, ni
represents the number of solutions and i is the
number of friction models.
Table 4. The time and position stability of friction models.
Name T(s) S(×10
2
)
Smooth 2.6988 12.7889
Threlfall 2.7909 11.6026
Bengisu 2.6242 13.8757
Karnopp 2.3851 13.9528
Velocity-based 2.1976 13.8141
Awrejcewicz 2.3762 12.5478
Dahl 9.6875 13.4439
LuGre 11.3336 15.0088
Elasto-plastic >100 14.5011
Stick-slip 10.4979 13.3829
Gonthier 16.7579 14.6707
Table 5. Comparison of selection order for various friction phenomena.
Name
J S Y J+S J+S+Y
t s t s t s t s t s
Smooth
Threlfall
Bengisu
④ ④ ① ②
① ②
Karnopp
③ ⑤
Velocity
① ③
Awrejcewicz
② ①
Dahl
① ①
LuGre
⑥ ⑧ ③ ⑤ ② ④
① ③
Elasto-plastic
⑧ ⑥ ⑤ ③ ④ ②
③ ①
Stick-slip
⑤ ② ② ①
② ①
Gonthier
⑦ ⑦ ④ ④ ③ ③
② ②
Investigation of Selection Mechanism of Friction Models in Multibody Systems
255
When the static friction phenomenon is only
required to be observed in the Rabinowicz case, it
can be seen from Table 6 that if the efficiency of
calculation is firstly considered the Velocity-based
model should be selected, and if the stability is a
priority the Awrejcewicz model should be chosen
first. When the "stribeck effect" only needs to be
observed in practice, the Bengisu model should be
chosen first for computational efficiency but the
Stick-slip model for stability. The Dahl model can
be selected directly when the pre-sliding is only
considered in actual conditions. Similarly, when the
static friction and the "stribeck effect" need to be
observed at the same time, the first choice is the
Bengisu model for the computational efficiency, and
for the stability of position the first choice is the
Stick-slip model. Finally, if three friction
phenomena mentioned above all need to be
described at the same time the LuGre model should
be selected when the efficiency of calculation is
considered firstly, but the Elasto-plastic model
should be chosen in consideration of the data
stability.
4.2 Model with Prismatic and Revolute
Joints
Summarizing the structural features of the two cases
before, the single pendulum box both with revolute
joints and prismatic joints is considered as the
research object. The effects of different friction
models on the motion characteristics of the two
components in the single pendulum box are studied.
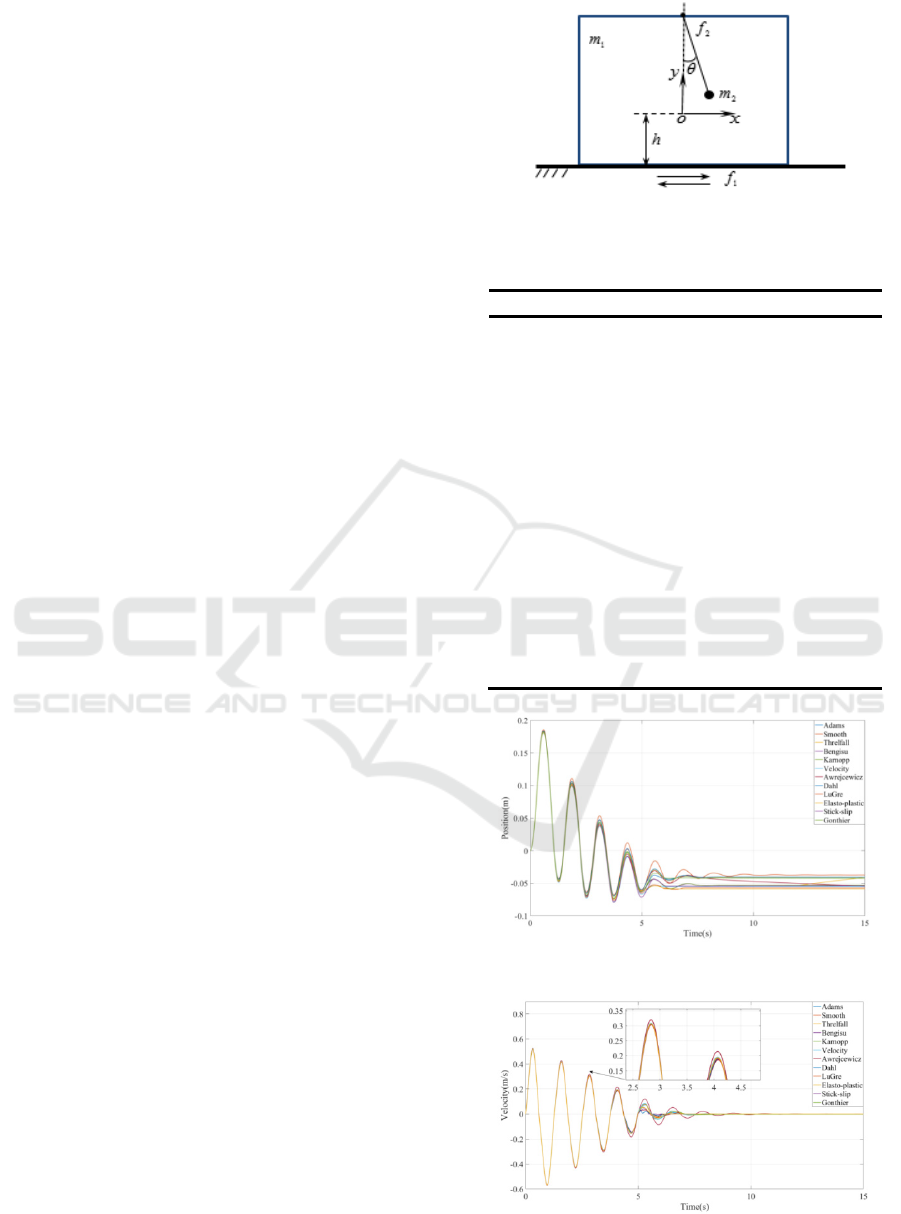
The schematic diagram of the mechanism is shown
in Fig. 6, and the parameters of each component in
the single pendulum box are shown in Table 10. The
pendulum hangs on the midcourt line on the top of
the box, the initial angle is 30° and the distance to
the ground from the body center of mass is h. The
free swing of the single pendulum drives the box to
slide left and right and finally comes to rest.
Considering the frictional force of the prismatic and
revolute joints at the same time, the box appears to
be the viscous and sliding as its velocity approaches
zero. See Fig.6 ~ Fig.12 for its characteristic curves
in motion.
Fig 6. Simple diagram of simple pendulum box.
Table 6. Simple pendulum box parameters.
Name Value Name Value
Box
mass(m
1
)
6 kg
Initial
angular
(
)
30°
Box
moment(I
1
)
0.1
kg.m
2
Initial
position
(pendulum)
[0,0.4]
The height
of center
of mass(h)
0.2m
Pendulum
moment(I
2
)
1.8
kg.m
2
Initial
position
(Box)
[0,0]
Step size(t)
l0
-6
s
Pendulum
mass(m
2
)
20 kg Time step(t) 15s
Rod
length(L)
0.3m
Integral
method
Runge-
Kutta
Fig 7. Relative displacement for the box.
Fig 8. Relative velocity for the box.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
256
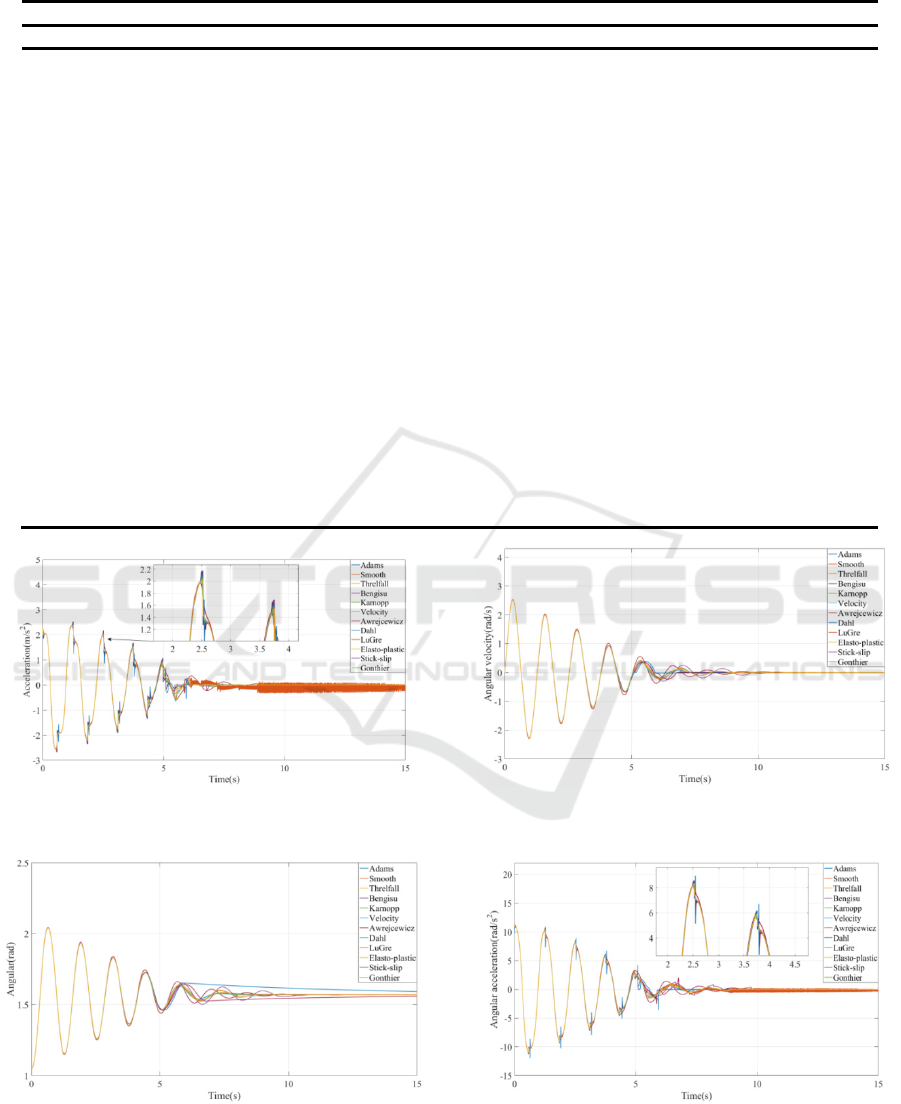
Table 7. The friction model parameters for Simple pendulum box.
Simple pendulum Box
Name Symbol Value Name Symbol Value
Dynamic
friction
coefficient
u
d
0.002
Dynamic friction
coefficient
u
d
0.02
Static friction
coefficient
u
s
0.003
Static friction
coefficient
u
s
0.03
Velocity error v
d
10
-2
m/s Velocity error v
d
0.06m/s
v
s
10
-3
m/s v
s
0.0005
v
t
10
-3
m/s v
t
10
-3
m/s
Stribeck
velocity
v
str
10
-3
m/s Stribeck velocity v
str
10
-3
m/s
v
str
10
-5
m/s(Gon) v
str
10
-5
m/s(Gon)
Stiffness
coefficient
0
10
4
N/m Stiffness coefficient
0
10
4
N/m
Damping
coefficient
1
2Ns/m Damping coefficient
1
2Ns/m
Adhesion
coefficient
2
0 Ns/m Adhesion coefficient
2
0 Ns/m
Breakaway
displacement
z
ba
10
-7
m
Breakaway
displacement
z
ba
10
-7
m
Maximum
deformation
z
max
10
-7
m
Maximum
deformation
z
max
10
-7
m
Dwell-time
constant
dw
0.01 Dwell-time constant
dw
0.01
Fig 9. Relative acceleration for the box.
Fig 10. Relative angular for the pendulum.
Fig 11. Relative angular velocity for the pendulum.
Fig 12. Relative angular acceleration for the pendulum.
Investigation of Selection Mechanism of Friction Models in Multibody Systems
257

Table 8. The time and position stability of friction models.
Name T(s) S(×10
2
)
Smooth 3.5109 5.8842
Threlfall 4.3273 6.4755
Bengisu 5.8561 6.7982
Karnopp 6.5503 7.0905
Velocity-based 8.3748 3.7149
Awrejcewicz 6.1151 7.1542
Dahl 45.3545 6.8376
LuGre 76.8279 6.2963
Elasto-plastic 229.0278 3.3126
Stick-slip 99.3741 1.4088
Gonthier 129.9982 5.3765
Table 9. Comparison of selection order for various friction phenomena.
Name
J S Y J+S J+S+Y
t s t s t s t s t s
Smooth
Threlfall
Bengisu
① ⑥ ① ⑤
① ②
Karnopp
③ ⑦
Velocity
④ ③
Awrejcewicz
② ⑧
Dahl
① ④
LuGre
⑤ ⑤ ② ④ ② ③
① ③
Elasto-
plastic
⑧ ② ⑤ ② ④ ①
③ ①
Stick-slip
⑥ ① ③ ①
② ①
Gonthier
⑦ ④ ④ ③
③ ②
② ②
The single pendulum box is a kind of mechanism
in which the sliding block is driven to back and forth
by the weight component of the pendulum. In the
whole process of moving, the friction model is
coupled with the mechanical system, which is
because the friction in the prismatic joints and the
friction in revolute joints are both considered. From
Fig. 7 to Fig. 9, it can be seen that the static friction
model and the dynamic friction model have little
influence on the relative position and velocity of the
box, but the acceleration has an obvious error and
appears big fluctuation. See Fig.10 to Fig.12, it is
found that the relative angle, the relative angular
velocity and relative angular acceleration of the
single pendulum in the selection of the LuGre model
and the Elasto-plastic model have obvious errors at
the end of the motion. The same as two cases above,
the best choice of each friction model for the
specified friction phenomenon can be obtained by
sorting the efficiency of calculation and the stability
of position. The following conclusions can be
obtained by comparing the select method of the
three cases:
(1) For the single pendulum box, it is different
from the previous two cases when the static friction
phenomenon is only required to be observed in
actual conditions. If the efficiency of calculation is
taken first, the Bengisu model should be selected; if
the stability is taken first, the Stick-slip model
should be taken.
(2) When the actual conditions only need to
observe the "stribeck effect", the selection of the
friction model is the same as the Rabinowicz case.
When the pre-sliding is only needed to be
considered, the Dahl model was selected owing to
the computational efficiency has little influence on
the variation of the kinds of the joint in the
mechanism and remained the highest effect all the
time. When the stability of position is considered
first, the select method of the single pendulum box is
the same as the Rabinowicz case, namely, the
Elasto-plastic model should be selected.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
258

(3) When the static friction and the "stribeck
effect" need to be observed at the same time or the
three kinds of friction phenomena mentioned in the
previous section need to be observed simultaneously,
the change of the prismatic joints and the revolute
joints in the mechanism has no influence on the
selection of friction model. Considering the
difficulty of parameter selection, it is generally
preferred the LuGre model in actual conditions.
5 CONCLUSION
In this paper, six static friction models and five
dynamic friction models are briefly reviewed for the
problem of dynamic performance affected by the
different friction models. Two kinds of mechanisms
including a model with prismatic joints and model
both with prismatic joints and revolute joints were
tested, the dynamic simulation of the three cases was
conducted and the change curve was drawn. The
numerical solution is compared with ADAMS, and
the analysis shows that:
(1) According to the special requirements of
friction phenomena in practical application, the
selected order of friction models discussed in this
paper is different when the multibody system
includes different joints, especially in considering a
certain friction phenomenon. Only fewer friction
models can be selected when need to describe more
friction phenomena. This is a very important reason
to limit the selected order of friction model when the
multibody system includes different kinds of joints,
such as only including prismatic joint or including
revolute joint and prismatic joint simultaneously.
(2) Compared to the static friction models, the
dynamic friction models own favorable continuity
when the multibody system contains different kinds
of joints. It is more important that the dynamic
friction models can better depict the nonlinear
behavior such as the pre-sliding, the "Stribeck
effect", the static friction and the viscous- sliding.
(3) Regarding the multibody system only
includes prismatic joints, the effect of different kinds
of friction modes on its dynamic response is not
obvious. When the multibody system simultaneously
includes prismatic joints and revolute joint, the
effect of dynamic friction model on the acceleration
is significant.
(4) Due to the dynamic friction model involves a
lot of parameters and has a significant influence on
the multibody system with revolute joint, in order to
improve the computational accuracy and the stability
of calculated results, hence, the dynamic friction
model should avoid being selected in the multibody
system with revolute joint. However, the LuGre
model is the best choice when the more friction
phenomena need to be studied.
In order to eliminate the adverse factors caused
by the friction to improve the dynamic performance
of the mechanical system, the effects of different
friction models on the characteristics in the motion
of the multibody systems with prismatic joints and
revolute joints are considered in this study.
According to the computational efficiency and the
stability of different friction models in different
mechanisms, the optimal friction model with
different kinds of joints in multibody systems is
obtained. Different multibody systems select
different friction models according to the actual
conditions, the computational efficiency and the
stability of simulation results. The friction model
with different kinds of joints is a very important
factor for the results of the dynamic calculation. The
qualitative analysis of different friction models in
the dynamic characteristics of the mechanisms with
different kinds of joints provides an important
theoretical basis for the following study of dynamics
in multibody systems with clearance and collision.
ACKNOWLEDGEMENTS
The authors is supported by research fund for the
doctoral program of Longdong University. (No.
XYBY1906).
REFERENCES
Ambrósio Jorge A.C. Impact of Rigid and Flexible
Multibody Systems: Deformation Description and
Contact Models [J]. Virtual Nonlinear Multibody
Systems, 2003.
Armstrong-Hélouvry B., Canudas Dewit, C: Friction
modeling and compensation, The Control Handbook,
Boca Raton: CRC Press, 1995.
Awrejcewicz Jan, Fečkan Michal, Olejnik Pawel. On
continuous approximation of discontinuous systems
[J]. Nonlinear Analysis: Theory, Methods &
Applications, 2005, 62(7): 1317-1331.
Awrejcewicz J. Chaotic motion in a nonlinear oscillator
with friction [J]. Ksme Journal, 1988, 2(2): 104-109.
Awrejcewicz J, Grzelczyk D, Pyryev Yu. On a Novel Dry
Friction Modeling: Differential Equations
Computation and Lyapunov Exponent Estimation[C].
Topics on Chaotic Systems - Selected Papers from
CHAOS 2008 International Conference, 2009: 22-30.
Investigation of Selection Mechanism of Friction Models in Multibody Systems
259

Bengisu M. T., Akay A. Stability of Friction-Induced
Vibrations in Multi-Degree-of-Freedom Systems [J].
Journal of Sound & Vibration, 1994, 171(4): 557–570.
Benson David J., Hallquist John O. A single surface
contact algorithm for the post-buckling analysis of
shell structures [J]. Computer Methods in Applied
Mechanics & Engineering, 1990, 78(2): 141-163.
Berger Ej. Friction modeling for dynamic system
simulation [J]. Applied Mechanics Reviews, 2002,
55(6): 25--32.
Cha Ho Young, Choi Juhwan, Han Sik Ryu, et al. Stick-
slip algorithm in a tangential contact force model for
multi-body system dynamics [J]. Journal of
Mechanical Science & Technology, 2011, 25(7):
1687-1694.
Coulomb P.C.A. Theorie des machines simple s [M].
Bachelier: 1821.
Dahl P. R. A Solid Friction Model [J]. Aerospace Corp El
Segundo Ca, 1968.
De Wit C. Canudas, Olsson H, Astrom K. J, et al. A New
Model for Control of Systems with Friction [J]. IEEE
Transactions on Automatic Control, 1995, 40(3): 419-
425.
Duan Chengwu, Singh Rajendra. Dynamics of a 3dof
torsional system with a dry friction controlled path [J].
Journal of Sound & Vibration, 2006, 289(4): 657-688.
Dupont P., Armstrong B., Hayward V. Elasto-plastic
friction model: contact compliance and stiction[C].
American Control Conference. Acc, 2002: 1072-1077
vol.2.
F. S, A X, Cieszka, et al. The importance of static friction
characteristics of brake friction couple, and methods
of testing [J]. Lubrication Science, 2010, 3(2): 137-
148.
Gonthier Yves, Mcphee John, Lange Christian, et al. A
Regularized Contact Model with Asymmetric
Damping and Dwell-Time Dependent Friction [J].
Multibody System Dynamics, 2004, 11(3): 209-233.
Karnopp D. Computer Simulation of Stick-Slip Friction in
Mechanical Dynamic Systems [J]. Trans.of the Asme
J.dyn.syst.meas.control, 1985, 107(1): 100-103.
Leine R. I., Campen D. H. Van, Kraker A. De, et al. Stick-
Slip Vibrations Induced by Alternate Friction Models
[J]. Nonlinear Dynamics, 1998, 16(1): 41-54.
Marques Filipe, Flores Paulo, Pimenta Claro J. C., et al. A
survey and comparison of several friction force
models for dynamic analysis of multibody mechanical
systems [J]. Nonlinear Dynamics, 2016, 86(3): 1407-
1443.
Threlfall D. C. The inclusion of Coulomb friction in
mechanisms programs with particular reference to
DRAM au programme DRAM [J]. Mechanism &
Machine Theory, 1978, 13(4): 475-483.
Wojewoda J, Stefański A, Wiercigroch M, et al. Hysteretic
effects of dry friction: modelling and experimental
studies [J]. Philosophical Transactions Mathematical
Physical & Engineering Sciences, 2008, 366(1866):
747-765.
Xie Youbo. Research on the status quo and devel-opment
strategy of tribology science and engineeri-ng
application [M]. Higher Education Press, 2009.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
260
