
InfoSalGAIL: Visual Attention-empowered Imitation Learning of
Pedestrian Behavior in Critical Traffic Scenarios
Igor Vozniak, Matthias Klusch, Andr
´
e Antakli and Christian M
¨
uller
German Research Center for Artificial Intelligence (DFKI),
Stuhlsatzenhausweg 3, 66123 Saarbruecken, Germany
Keywords:
Visual Attention-empowered Imitation Learning, End-to-End Human-like Data-driven Simulation, Critical
Scenario Generation.
Abstract:
The imitation learning of complex pedestrian behavior based on visual input is a challenge due to the underly-
ing large state space and variations. In this paper, we present a novel visual attention-based imitation learning
framework, named InfoSalGAIL, for end-to-end imitation learning of (safe, unsafe) pedestrian navigation
policies through visual expert demonstrations empowered by eye fixation sequence and augmented reward
function. This work shows the relation in latent space between the policy estimated trajectories and visual-
attention map. Moreover, the conducted experiments revealed that InfoSalGAIL can significantly outperform
the state-of-the-art baseline InfoGAIL. In fact, its visual attention-empowered imitation learning tends to much
better generalize the overall policy of pedestrian behavior leveraging apprenticeship learning to generate more
human-like pedestrian trajectories in virtual traffic scenes with the open source driving simulator OpenDS.
InfoSalGAIL can be utilized in the process of generating and validating critical scenarios for adaptive driving
assistance systems.
1 INTRODUCTION
Complex human-like on-street walking activities are
hard to mimic by means of end-to-end imitation learn-
ing. The underlying massive state-space and high
variation in data may lead to insufficient objective
generalization of the trained policy. Nevertheless, im-
itation learning based methods succeeded in a wide
range of problems (Ziebart et al., 2008; Englert and
Toussaint, 2018; Finn et al., 2016; Stadie et al., 2017;
Ermon et al., 2015) given expert demonstrations. For
example, the recently proposed system InfoGAIL (Li
et al., 2017) performs end-to-end imitation learning
based on clustered visual demonstrations by various
experts. During training, the derivation of latent code
relies on highly mutual information between the code
and those expert demonstrations used for policy in-
ference. However, our experiments revealed that In-
foGAIL suffers from poor policy generalization in
due course of learning to imitate human-like on-street
walking pedestrians in complex traffic scenes.
To this end, we developed a novel approach for vi-
sual attention-empowered end-to-end imitation learn-
ing of pedestrians in virtual traffic scenes. The re-
sulting system, named InfoSalGAIL, is now capa-
ble of learning given human expert behavior of on-
street walking in complex traffic scenes based on vi-
sual input only with additional prior knowledge in the
form of visual attention or saliency maps (cf. Sec-
tion 3.2). Our experiments with human pedestrian be-
havior learning avatars in traffic scenes with the vir-
tual driving simulator OpenDS
1
revealed that InfoS-
alGAIL may significantly fasten and improve the imi-
tation learning process as compared to its baseline In-
foGAIL (cf. Section 4.1). The code for reproducing
the experiments is available in free access as part of
the open source simulation software OpenDS (version
6.0). The contributions of this work are threefold:
1. Development of a novel approach to visual
attention-empowered imitation learning based on
integrated use of individual pedestrian saliency
maps (cf. Figure 1) for large state spaces in com-
plex urban traffic scenes. Experimental evalua-
tion of the approach shows significant improve-
ment over its baseline InfoGAIL in terms of speed
and quality of learning.
2. Development of a new open-source benchmark
for training and testing pedestrian imitation learn-
1
https://opends.dfki.de
Vozniak, I., Klusch, M., Antakli, A. and Müller, C.
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios.
DOI: 10.5220/0010020003250337
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 325-337
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
325
ing avatars in critical traffic scenarios with the
open-source virtual driving simulator OpenDS.
For this purpose, OpenDS has also been extended
with new modules for covering human pedestrian-
centred perspectives and control such as head
movements (pitch, yaw) and walking.
3. The results of our experimental performance eval-
uation of the approach based on the German In-
depth Accident Study (GIDAS
2
) strongly sup-
ports the hypothesis that the used saliency maps
can be considered as a kind of individual pedes-
trian movement policy fingerprints. Their inte-
grated usage may enforce the policy generator
of pedestrian avatars to more human-like (expert-
like) actions in virtual critical traffic scenarios.
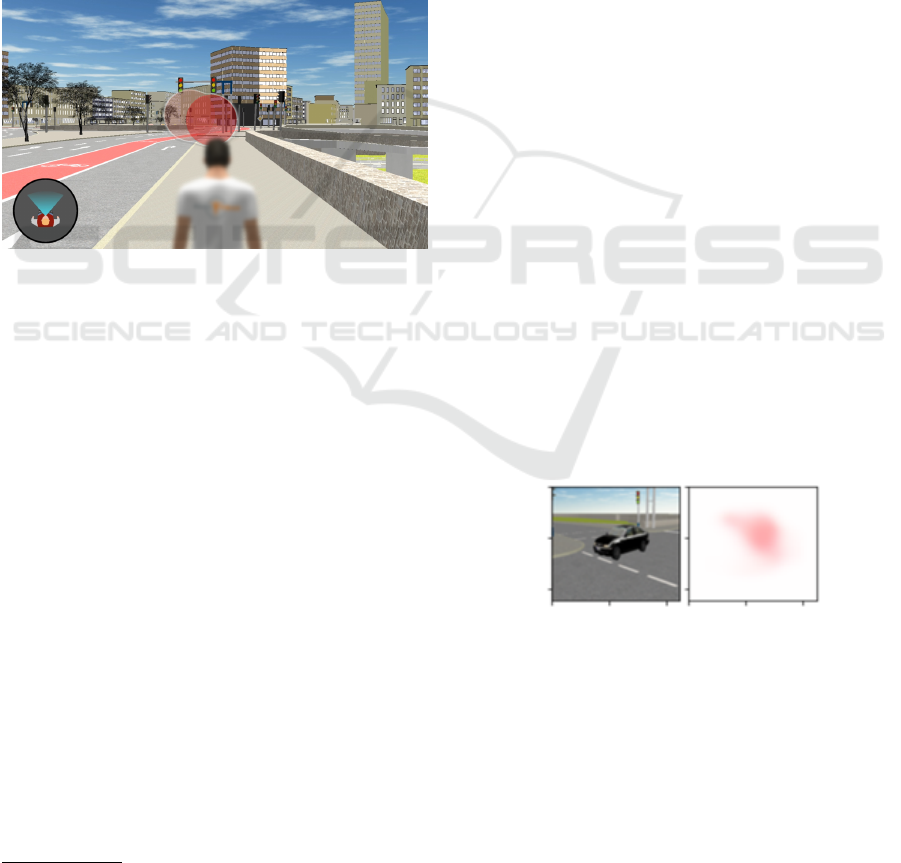
Figure 1: Visual attention-empowered imitation learning
with InfoSalGAIL in OpenDS traffic scene. The augmented
eye fixation sequence in the center of the image shows those
features that are most attractive for the individual pedestrian
walking in the scene.
The remainder of the paper is structured as fol-
lows. Section 2 reviews the background required to
follow this research work and covers the state-of-
the-art analysis in the domain of imitation learning.
Section 3 presents InfoSalGAIL, our visual attention-
empowered imitation learning framework, which is
applied to the problem of human-like pedestrian tra-
jectory generation. Moreover, it covers the train-
ing and the testing phases with the explanation of
the introduced loss function. Section 4 describes the
data creation process as well as conducted experi-
ments and obtained results in comparison to the cho-
sen baseline. Finally, we conclude the paper in Sec-
tion 5.
2
https://www.gidas.org
2 BACKGROUND AND RELATED
WORK
2.1 Visual Attention
According to Corbetta (1998), visual attention defines
the mental ability to select stimuli, responses, memo-
ries or thoughts that are behaviorally relevant among
the many others that are behaviorally irrelevant. The
human visual system is agitated by entities of the sur-
roundings in color and shape. It leads to the physio-
logical fact that the human is not capable of attending
at all elements of the visual field of view (FoV) at the
same time due to the limited cognitive capacity of the
brain. Thus, the brain has an ability to filter out vi-
sually perceived information, which was defined by
Sully (1891) as selective visual attention, where the
spotlight model has been initially proposed to justify
the visual attention feature of the brain.
There are two classes of factors which influence
visual attention, namely bottom-up and top-down.
The bottom-up class is based on the physical prop-
erties of the objects that fall in the visual FoV of hu-
mans like shapes, colors, size and orientation. In con-
trast, the top-down class is task-dependent and influ-
enced by the current task, cognitive abilities and/or
experience. The prominent computational model of
visual attention that describes it from both the bottom-
up and top-down perspectives is the so-called saliency
model. Its task is to identify an area of interest (most
attractive or probable area), which can be seen as a
set of pixels, which corresponds to the scene entities.
We adopted a heat map (2D image of the same size),
where the intensity of the color corresponds to the rel-
evance of the given pixel. Figure 2 shows a sample of
the expert‘s FoV and the corresponding saliency map.
Figure 2: Visual attention sample. Left: expert‘s field
of view of size 224 × 224 pixels; Right: corresponding
saliency map. As seen from the given pair of images, a
significant portion of visual attention map, given crossing
the street task, is attached to the approaching vehicle.
2.2 Preliminaries
The pedestrian navigation problem, from the per-
spective on imitation learning (cf. Section 2.3), can
be defined as an infinite-horizon discounted Markov
Decision Process (MDP) (S, A, P, r, ρ
0
, γ), where S
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
326

denotes the finite state space, A the finite set of
actions, P : S × A × S ⇒ R the transition probability
distribution function, r : S ⇒ R the reward function,
ρ
0
: S ⇒ R the distribution of initial state s
0
, and γ ∈
(0, 1) the discount factor. Let π denote a stochastic
policy π : S × A ⇒ [0, 1] with the expert policy π
E
to
be mimicked given in the form of visual demonstra-
tions only. A set of expert trajectories τ
E
generated
by the policy π
E
consists of a sequence of state-action
pairs. The expectation with respect to the policy π is
used to denote an expectation with respect to the gen-
erated trajectories: E
π
[ f (s, a)] , E[
∑
∞
t=0
γ
t
f (s
t
, a
t
)],
such that s
0
∼ ρ
0
, a
t
∼ π(a
t
|s
t
), s
t+1
∼ P(s
t+1
|a
t
, s
t
).
2.3 Imitation Learning
In this work, we apply imitation learning to let pedes-
trian avatars learn to best mimic some demonstrated
human pedestrian walking or navigation policy π(a|s)
without knowing the reward function r of the con-
sidered MDP. The two broadly applicable classes of
solutions of imitation learning approaches are behav-
ior cloning (BC) and apprenticeship learning (AL).
Behavior cloning uses a sequence of state-action pairs
of an expert for approximating a solution towards
learning the policy (Pomerleau, 1989). However,
BC is known to poorly generalize from the given
problem due to compounding errors and covariant
shift (Ross and Bagnell, 2010; Ross et al., 2011). On
the other hand, AL tends to reconstruct the reward
function (Abbeel and Ng, 2004; Syed et al., 2008; Ho
et al., 2016), but at high computational costs due to
embedded reinforcement learning in the training loop.
Generative Adversarial Imitation Learning. One
prominent work on AL is the Generative Adversar-
ial Imitation Learning (GAIL) approach (Ho and Er-
mon, 2016), which objective is to learn the pol-
icy for a given complex task without estimating the
reward function directly. GAIL is based on the
originally introduced generative adversarial network
(GAN) (Goodfellow et al., 2014) which consists of
two networks, a generator as the end-policy estimator
π and a discriminator that has to differentiate between
the given real and synthesized inputs generated from
π
E
and π, respectively. Thus, GAIL is intimately con-
nected to GAN, however with a newly introduced ob-
jective. Mathematically, the objective of a GAIL is
defined as follows:
min
π
max
D∈(0,1)
S×A
E
π
[logD(s, a)]+
E
π
E
[log(1 − D(s, a))] − λH(π)
(1)
where π denotes the agent‘s policy, π
E
the policy of
the expert, D the discriminative classifier, which tries
to distinguish state-action pairs generated by π and
π
E
respectively. The H(π) , E[− logπ(a|s)] denotes
the γ - discount casual entropy of the policy π
θ
as
defined by Bloem and Bambos (2014). The objective
of a GAIL is to learn the optimal reward policy based
on its discriminator D reasoning during the compar-
ison. Thus, the optimal policy π is achieved, once
D reaches maximum uncertainty state. The GAIL
framework addresses the problem of learning a policy
from example expert behavior without interaction
with the expert or access to reinforcement signal. It is
a model-free approach of directly extracting a policy
from data, similar to inverse reinforcement learning.
For this purpose, it leverages a hybrid optimization
approach by alternating between gradient steps
to maximize (1), achieved by using Monte-Carlo
estimation of policy gradients, and trust region policy
optimization (TRPO) (Schulman et al., 2015) to
minimize (1) with respect to the agent policy π.
InfoGAIL. The InfoGAIL system (Li et al., 2017;
Hausman et al., 2017) is an extension to GAIL, that
motivates our work and serves as baseline for com-
parative experimental performance evaluation. In In-
foGAIL, the agent‘s policy estimation is derived from
the mixture of expert trajectories, where a direct rela-
tion to the latent variable has been added as proposed
by Chen et al. (2016). Thus, the extended policy
objective given latent variable c resulted in π(a|s, c),
which is an approximation to the π
E
, c denotes a tu-
ple of the form [x, 1 − x], where x ∈ [0, 1]. In or-
der to force the network to rely on the introduced la-
tent variable, an information-theoretic regularization
has been utilized, which states that there should ex-
ist a high mutual information between the latent vari-
able and state-action pairs in generated trajectories.
Thus, the model objective in (1) extended with a vari-
ational lower bound L
1
(π, Q) of the mutual informa-
tion I(c; τ), where τ denotes trajectory, is as follows:
min
π,Q
max
D
E
π
[logD(s, a)]+
E
π
E
[log(1 − D(s, a)] − λ
1
L
1
(π, Q) − λH(π)
(2)
where λ
1
is the hyper-parameter for the information
maximization regularization term. Hence, the varia-
tional lower bound, L
1
(π, Q), of the mutual informa-
tion is given as:
L
1
(π, Q) = E
c∼p(c),a∼π(·|s,c)
[logQ(c|τ)] + H(c) ≤ I(c, τ)
(3)
where Q(c|τ) is an approximation of the true posterior
P(c|τ). After introducing an augment-reward term
(Englert and Toussaint, 2018) to incorporate prior
knowledge and the Wasserstein GAN Arjovsky et al.
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
327
(2017) to overcome the vanishing gradient problem,
the final objective is denoted as:
min
θ,ψ
max
ω
E
π
θ
[D
ω
(s, a)] + E
π
E
[D
ω
(s, a)]−
λ
0
η(π
θ
) − λ
1
L
1
(π, Q) − λH(π)
(4)
where η(π
θ
) = E
s∼π
θ
[s
r
] reflects tendency towards
learning the desired behavior.
3 THE InfoSalGAIL APPROACH
The InfoSalGAIL system enables the imitation of
human-like walking behavior of pedestrians by means
of navigating avatars in realistic traffic scenarios gen-
erated with virtual driving simulators. Simulated be-
havior of a human pedestrian is considered safe or un-
safe and is dependent on the current position of the ex-
pert in relation to the defined traffic scene zones (cf.
Figure 3). InfoSalGAIL solves the pedestrian naviga-
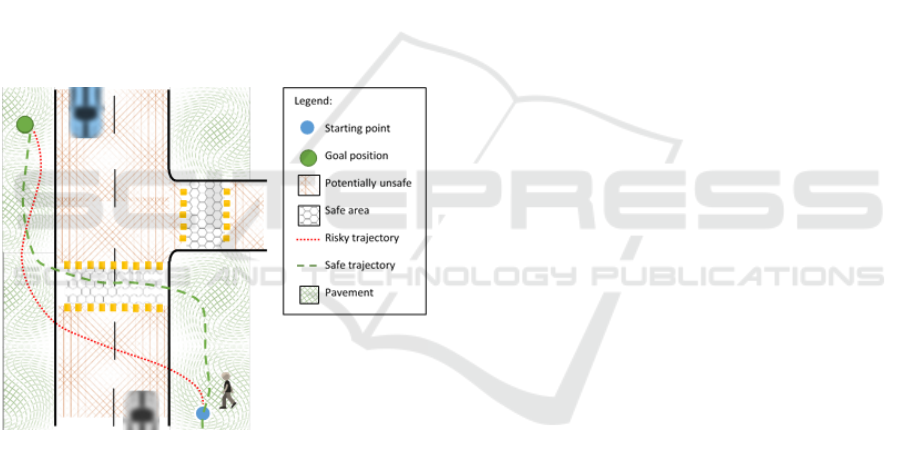
Figure 3: Example of the environment partitioned into
scene zones. The red dotted trajectory shows a sample of
risky navigation, where the green dashed one, highlights
possible safe trajectory since zebra crossing taken to cross
the street in pursuance of reaching the goal.
tion problem defined in Section 2.2 with the following
modifications with respect to visual attention and re-
wards.
3.1 Visual Attention and Rewards
Visual Attention and Policy. The finite state
space S of the considered MDP is extended with
pairs of visual and saliency information (vis, sal).
Thus, the expert policy is given in the form of
visual demonstrations supported by the saliency
heat maps described in Section 2.1 each of which
stands for a fixation sequence. Thus, the expec-
tation with respect to the policy π denotes an
expectation with respect to the generated trajec-
tories: E
π
[ f (s
vis,sal
, a)] , E[
∑
∞
t=0
γ
t
f (s
t
vis,sal
, a
t
)],
such that s
0
∼ ρ
0
, a
t
∼ π(a
t
|s
t
vis,sal
), s
t+1
vis,sal
∼
P(s
t+1
vis,sal
|a
t
, s
t
vis,sal
).
Reward Augmentation. As proposed by En-
glert and Toussaint (2018), a reward augmenta-
tion is required in order to gain prior knowledge
about the environment as well as to compensate
for a complex state space, e.g. urban scene, in
which pedestrian avatar can literally walk (steer)
to any direction. Thus, it is essential to intro-
duce scene semantics as part of the surrogate re-
ward function, which is defined as follows r =
(coll
sta
, coll
car
, nM
car
, coll
ped
, nM
ped
, loc, dist
goal
,
vis
goal
), where
• coll
sta
∈ ] − 1, 1[ denotes collision occurrence to
the static objects of the scene, e.g. buildings, traf-
fic signs, traffic lights, other street furniture, etc;
• coll
car
∈]−1, 1[ denotes collision occurrence con-
cerning the vehicles;
• nM
car
∈]− 0.5, 0.5[ stands for the occurrence of a
near-miss with a reference to the vehicles;
• coll
ped
∈ ] − 0.1, 0.1[ represents collision occur-
rence to any non-player character (NPC) pedes-
trian avatar;
• nM
ped
∈ ] − 0.05, 0.05[ denotes the occurrence of
a near-miss with reference to the NPC;
• loc ∈ {−1; 0.5;1} denotes the location of the
avatar with respect to the defined simulation scene
zones (cf. Figure 3);
• dist
goal
∈ [0, 1[ denotes avatar‘s distance to the
goal;
• vis
goal
∈ ] − 1, 1[ stands for the in range of vision
goal, e.g. in the case of an obstacle between the
avatar and the goal, like a column in the FoV, the
end-reward approaches −1.
The proposed surrogate reward adopts the label
smoothing technique to discourage the discriminator
from producing overconfident classification and en-
suring that a much broader set of features considered
during classification task, e.g. in the case of a near-
miss with a vehicle, instead of using a fixed negative
reward [−0.5], a value in the range of [−0.45;−0.55]
is sampled. We adapt the near-miss/hit concept for the
car (Pusse and Klusch, 2019) as illustrated on Figure
4 with the shifted focus towards pedestrian. The shape
of the near-miss area is dynamically scaled to cover
fast walking activity, e.g. stretched in walking direc-
tion in accordance to the avatar‘s speed and is equal
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
328
to the hit area in the case of idle. Due to the applied
augmented reward function (similar to the baseline),
InfoSalGAIL can be seen as a hybrid between rein-
forcement and imitation learning. Thus, the reinforce-
ment signal for the purpose of policy optimization is a
compound of explicitly defined surrogate reward and
implicitly derived reward from the Discriminator.
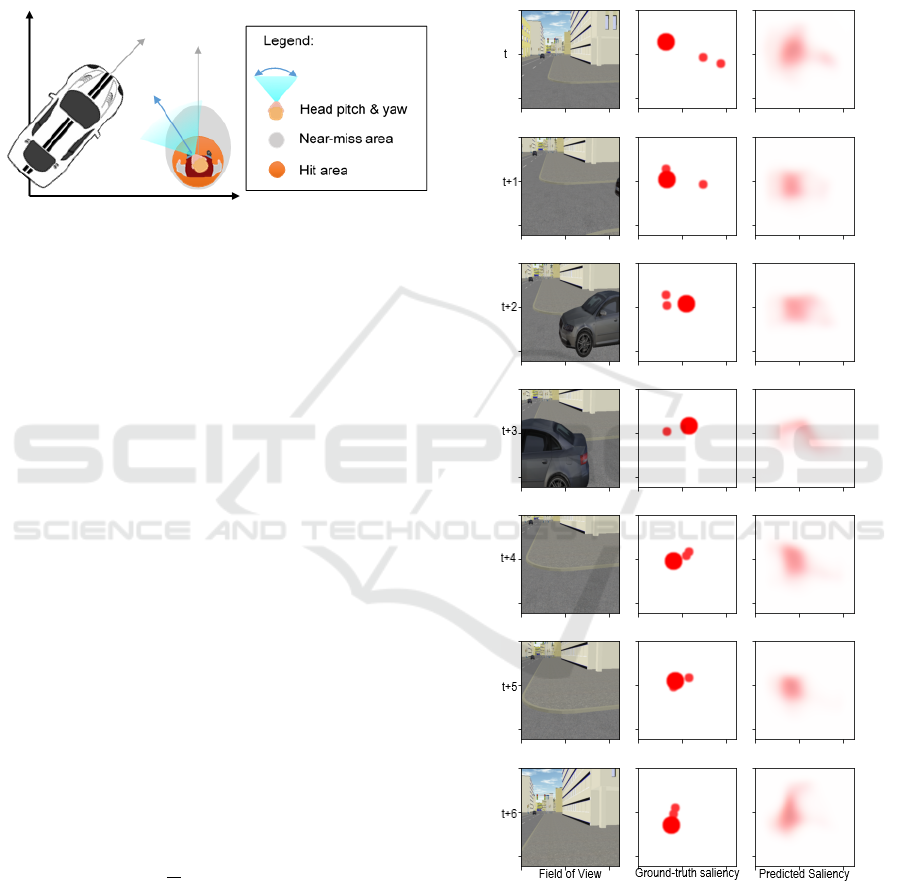
Figure 4: Sample of near-miss and hit areas. The grey
vector indicates the move direction of both the vehicle and
pedestrian. The blue vector indicates look direction of the
avatar‘s head, where pitch and yaw actions are supported.
3.2 Saliency Generator
Inspired by the approach for visual saliency predic-
tion with GAN (SalGAN) by Pan et al. (2017), In-
foSalGAIL adopts the generator part of SalGAN that
follows its convolutional encode-decode network ar-
chitecture. This network is identical to the VGG-
16 proposed by Simonyan and Zisserman (2014) net-
work, where the last five layers are removed to update
the training objective from soft-classification task to
match reconstruction of the input image objective.
The initial weights of the network initiated with pre-
trained weights of VGG-16 given ImageNet classifi-
cation dataset, to achieve feature extraction. In addi-
tion to the generator architecture, we added a Dropout
layer after the second cascade of convolutional layers
of decoder to avoid, experimentally confirmed, model
over-fitting. During the training, the batch size is set
to 96, where Adagrad (Duchi et al., 2011) optimizer
was utilized with the loss rate of 0.0001.
The loss is computed on a per-pixel basis, based
on the binary cross-entropy function and is denoted
as:
∆
E
= −
1
N
N
∑
j=1
(M
j
log(
ˆ
M
j
)+
(1 − M
j
)log(1 −
ˆ
M
j
))
(5)
where
ˆ
M stands for the predicted saliency value (map)
and M denotes the ground truth respectively, N =
W
img
× H
img
is the resolution of the input image.
The sequence of image-saliency triples on Figure 5
demonstrates Case-2 critical scenario, based on GI-
DAS analysis, given the crossing the street objective.
As illustrated, the left column refers to the avatar‘s
FoV, where the middle column denotes the ground-
truth saliency map, additionaly extended with a short-
term visual attention memory build upon the corre-
sponding saliency frames from t − 1 and t − 2 (circu-
lar areas of smaller diameter). The rightmost column
refers to the generated saliency maps.
Figure 5: Sample of a saliency generator input-output. Per-
formed on a continuous sequence of 7 images, given the
crossing of the street objective, with 10 Hz interval (top
to bottom order). Left column: FoV of the avatar; Middle
column: blurred saliency ground-truth map; Right column:
predicted saliency map. The achieved performance is equal
to 0.06261 (> 6%), given an input dataset of 1K images,
with the training/testing ratio of 0.7.
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
329

3.3 System Architecture
The InfoSalGAIL system architecture consists of four
different networks that are trained separately:
• the saliency generator network ∆
E
(s) as in Section
3.2 with the objective to reconstruct expert‘s most
probable visual attention map;
• the extended policy generator network
π
θ
(a|s
vis,sal
, c) (cf. Figure 6) which corre-
sponds to the end-learning policy we would like
to approximate;
• the extended discriminator network D
ω
(s
vis,sal
, a)
(cf. Figure 10), with the objective to differentiate
between the synthetic and true (expert) inputs;
• the extended posterior estimator network
Q
ψ
(c|s
vis,sal,
a) (cf. Figure 11), with the objective
to reconstruct the latent variable, in particular,
safe and unsafe navigation styles, given visual
demonstrations.
In contrast to the InfoGAIL work, where RMSProp
gradient descent algorithm is applied, D
ω
is updated
utilizing Stochastic Gradient Descent (SGD) opti-
mizer with Nesterov momentum and lossrate = 1e
−6
,
resulting in slower policy convergence, allowing for
better problem generalization given substantial state-
space and variations. The update of Q
ψ
and π
θ
performed by alternating between Adam optimizer
(Kingma and Ba, 2014) and TRPO as proposed by
Schulman et al. (2015). In accordance with Ho and
Ermon (2016), to accelerate network convergence,
the weights of π
θ
initialized through the behavior
cloning (BC) pre-trained network, enhanced by usage
of visual attention information. As in original Info-
GAIL, the discriminator network D
ω
and the poste-
rior approximation network Q
ψ
are threaded as differ-
ent networks, due to the applied weight clipping and
momentum-free optimization methods in the process
of training D
ω
(to avoid interference with Q
ψ
).
After applying all the extensions, the final training ob-
jective is given as:
min
θ,ψ,∆
max
ω
E
π
θ
[D
ω
(s
vis,sal
, a)] +
E
π
E
[D
ω
(s
vis,sal
, a)] − λ
0
η(π
θ
)−
λ
1
L
1
(π, Q) − ∆
E
(s) − λH(π)
(6)
Training and Inference. As shown on Figure 6, the
policy estimator π
θ
accepts two elements as an in-
put: the input image of the size 224 × 224 × 3 and
a set of XML files passed over in unpacked vector
format as auxiliary information for the frames at time
t − 1 and t − 2, denoting short-term memory. Concur-
rently, the input image pass on to saliency generator
∆
E
to derive the most probable visual attention map
for the current frame. The input image and obtained
saliency map are then feed through the ResNet50 (up
to activation layer 40) network followed by a cas-
cade of convolution layers to extract valuable feature
maps. Eventually, the feature maps of both signals
are merged through the average operation resulted in
drawing more attention to the features with higher
prior visual attention information (saliency map). As
depicted on Figure 6, afterward the flatten vector is
concatenated to the prior knowledge (memory) fol-
lowed by a set of fully connected layers merged (sum)
with the latent variable, which denotes the behavior
objective style, namely safe or unsafe on-street navi-
gation.
The discriminator D
ω
and posterior estimator Q
ψ
networks both accept the same input, which is the in-
put image and saliency map pair, auxiliary informa-
tion, and the action vector derived by the π
θ
on the
previous step. However, the objective of the two is
different, the Discriminator, as shown on Figure 10,
uses this information to estimate the origin of the data
by comparing synthetically generated input with the
true (expert) input. The Posterior, on the other hand,
aims for the latent variable (behavior class) prediction
(cf. Figure 11 in Appendix) given a pair of input im-
ages and corresponding saliency maps.
During the inference, the saliency generator ∆
E
and policy estimator π
θ
are the only involved net-
works.
4 EXPERIMENTS
Dataset Creation. A set of relevant critical scenarios
is a prior must-have condition before proceeding with
the numerical evaluation. Thus, we created, first of
its kind, pedestrian-centric dataset of the relevant
critical scenarios, named OpenDS-GIDAS Motivated
dataset (OpenDS-GiM)
3
based on the German
In-Depth Accident Study analysis, which consists
of pairs of visual demonstrations and corresponding
saliency maps. In particular, the generated dataset
consists of 9 classes of the most common critical
situations visualized on Figure 7, recorded using an
open source simulation software OpenDS
3
(given a
beforehand created virtual twin of ”name omitted”
city, Germany) supported by an eye-tracker sensor for
accessing the true expert fixation sequences. Prior to
the start of the recording session, an eye tracker has
been calibrated for every expert (6 in total), where
the overall precision of the chosen eye-tracker falls
under 0.7 degrees, and recall under 0.25 degrees. In
3
https://cloud.dfki.de/owncloud/index.php/s/
XarwdHgDYYmma7H
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
330
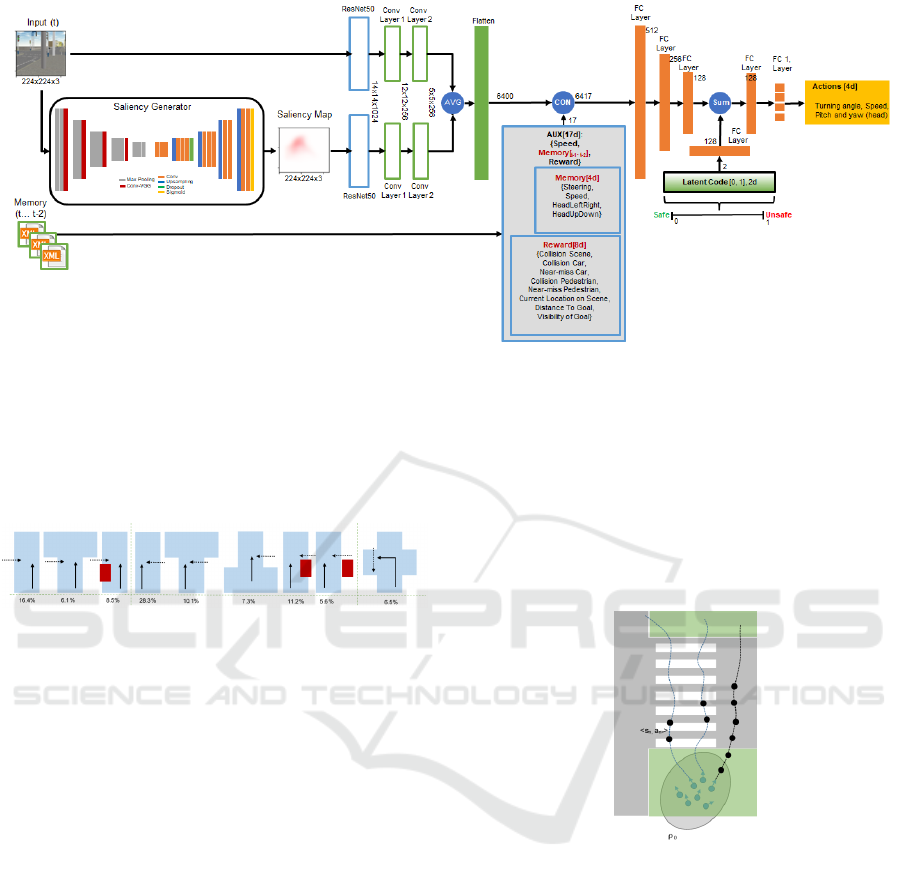
Figure 6: Visual Attention-Empowered Policy Generator architecture. The input image (224 × 224 × 3) is passed to both
ResNet50 (for feature extraction) and Saliency Generator (for saliency map generation). Following the cascade of convolu-
tional layers, both inputs are merged by using the AVG operation, resulted in highlighting more valuable feature maps. The
memory (XML) files are used as auxiliary information during the training and inference. Upon merging flatten feature maps
with auxiliary information and latent variable, an output vector is generated. The output of the network (4d vector) denotes
the turning angle (converted to a walking vector in OpenDS) and speed of the avatar as well as the pitch and yaw dimensions
of the movement of the head. The latent code, in the case of inference, is used to interpolate between selected behavior
objectives safe and unsafe.
Figure 7: Layout of GIDAS on-street critical scenarios.
The nine classes of accident scenarios between the car and
the pedestrian, clustered in accordance to the street layout
with the corresponding scenario occurrence ratio in percent-
age. The dotted vector denotes pedestrian moving direction,
where the solid vector states for the vehicle moving direc-
tion. The red rectangle is an obstacle, e.g. vehicle.
total, the released dataset
3
contains 140K of pairs of
FoV images and corresponding saliency maps.
Trajectory Generation. Due to the existence of po-
tentially endless set of possible avatar trajectories in
the simulation environment, the variance reduction
technique, in particular the common random numbers
(CRN) method has been applied. In contrast to the
vine path generation approach, initially proposed by
Schulman et al. (2015) in Section 5.2, the initial start-
ing point and orientation of the avatar is subject to a
normal distribution N(0, 1). Thus, the trajectory gen-
eration workflow starts with sampling s
n
∼ ρ
0
initial
states denoted by the tuple (Position, Rotation) and
follows with simulating the policy π
θ
, bounded by
CRN (cf. Figure 8). The generated trajectories addi-
tionally bounded by a certain length, through a fixed
time horizon, successfully achieved target objectives,
and/or false navigation, e.g. throughout safe trajec-
tory generation leaving of a safe zone leads to a neg-
ative reward and simulation reset. Hence, the gener-
ated actions, influenced by the CRN looks as follows:
a
n
= π(·|S
n
, σ).
Figure 8: Trajectory generation approach, where ρ
0
cor-
responds to the initial distribution of starting points in S,
where s = (Pos
x,y,z
, Rot
x,y,z
). The adopted CRN technique
aims to reduce the variance of the data, where the blue
dashed lines denotes samples of a safe trajectory, and black
dashed one correspond to an unsafe one, respectively. The
tuple < s
n
, a
n
> represents a sample of a state-action pair
along the generated trajectory.
4.1 Results
InfoSalGAIL framework is relying on the visual at-
tention information from the current frame t, which
was additionally extended with the reduced visual at-
tention map from frames t − 1 and t − 2 to compen-
sate for the gaps between the two sequential visual in-
puts (frames are captured and passed over to the neu-
ral network framework at 10Hz rate resulted in only
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
331

Figure 9: Plots of expert trajectories gathered during visual demonstrations (top row) together with policy generated tra-
jectories produced by InfoGAIL (baseline, middle row) and InfoSalGAIL (proposed, bottom row) frameworks. The scene
elements, e.g. vehicles, buildings, parking lots as well as simulation specific details like pitch and yaw (head turns) were
excluded from the plots for visual transparency. The color bar on the right denotes the normalized surrogate reward. As seen
from the plots, the baseline fails to generalize given problem objective resulting in generating rather similar trajectories for
safe and unsafe navigation styles. Moreover, it demonstrates poor performance in reaching the goal area and street crossing
task. In contrast, the trajectories generated by the proposed model are comparable to the expert trajectories.
two full frames per second). The auxiliary informa-
tion input for the policy generator at time t consists
of a 17-dimensional vector with following elements:
1) speed = 1d at time t; 2) actions = 4d at time t − 1
and t − 2, compound of (turning angle, speed, pitch,
and yaw); 3) reward = 8d (cf. Section 3.1) at time
t, where d denotes the dimension of elements. In the
scope of this work, we considered two classes of on-
street behavior: safe, where as demonstrated by the
expert, the objective is to cross the street and reach
the goal area by utilizing (pedestrian) safe zones in
the scene, e.g. pavement/sidewalk, zebra crossings;
unsafe uses same objective, however, with no limita-
tions with reference to scene zones, e.g. street lanes,
aside parking lots are allowed for navigation. Nev-
ertheless, the time constraint is not considered to be
a decisive factor due to the significant variability of
input data, e.g. the same expert can demonstrate dif-
ferent time to reach the goal performance as the result
of the scene dynamics or other latent factors. Thus, it
is not part of the evaluation schema. Since the con-
sidered problem state-space is multi-dimensional, it
is a challenge on its own to mathematically define rel-
evant evaluation metrics, e.g. one-to-one trajectory
comparison (expert vs avatar) cannot be considered.
To overcome this limitation, we propose the follow-
ing objective-oriented evaluation as summarized in
Table 1 and visually demonstrated in Figure 9, where
the trajectories of safe and unsafe navigation styles
for both InfoGAIL and InfoSalGAIL frameworks as
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
332

Table 1: Comparison evaluation of InfoGAIL and InfoSalGAIL frameworks given the street crossing task (Cases 1-3 based
on GIDAS analysis, conditioned by approaching vehicle from the right). InfoSalGAIL outperformed the baseline in all
categories, except for collision to street furniture one. Moreover, in the case of the safe simulation, in 50% of simulated
scenarios, avatar followed zebra section of given street layout to cross the street (resulted in a fraction of 0.269 out of all
trajectory points belonging to drivable scene zones, e.g. parking lots, pedestrian crossings, and drivable lanes). During the
simulation, an average value across all simulated trajectories, has been chosen as evaluation metrics, where a single trajectory
consists of a set of points, denoted by X and Y coordinates.
Approach
InfoGAIL
(baseline)
InfoSALGAIL
(ours)
Targeted behavior style of navigation: Safe Unsafe Safe Unsafe
Target area (goal) reached following the chosen objective behavior style, e.g. safe, unsafe? [higher better] 0.0 0.0 0.5 0.86
Objective (street crossing) reached? [higher better] 0.0 0.0 1.0 1.0
Collision to the street furniture (buildings) occurred? [lower better] 0.0 0.0 0.056 0.07
Collision to the vehicles occurred? [lower better] 0.05 0.035 0.045 0.03
Near-miss to the vehicles occurred? [lower better] 0.054 0.045 0.01 0.04
Avatar remained within the pavement area? (fraction out of all trajectory points) [higher better] 0.345 0.366 0.799 0.742
Avatar remained within drivable area? (fraction out of all trajectory points) [lower better] 0.655 0.633 0.201 0.258
Avatar navigated through the pedestrian crossing? (fraction out of drivable area trajectory points)
[higher better; not relevant for unsafe]
0.112 – 0.269 –
well as the expert demonstrations (ground truth) are
plotted. As shown in the plots, the substantial in-
crease in state-space led to a poor objective general-
ization by the baseline: the InfoGAIL model was not
able to cope with the given task. Moreover, the de-
sired target task of pedestrian agent to cross the street
was never reached, despite different latent variable in-
puts policy generator π
θIn f oGAIL
produced rather sim-
ilar end-trajectories. The very same is shown in Fig-
ure 12 (middle row) in the Appendix, where we ap-
plied a dimension reduction technique, namely Prin-
cipal Component Analysis (PCA) (Jolliffe, 2003), to
visualize the policy generator output vector (in less di-
mensions) That aimed at controlling the avatar within
simulated environment by means of principal compo-
nents and corresponding variations. The PCA plots
(middle row, Figure 12) confirms high similarity with
actions produced by the policy generator π
in f oGAIL
for
the chosen walking styles, e.g. safe, unsafe. This
can serve as another proof of poor model general-
ization given human-like on-street trajectory gener-
ation task. In contrast, trained InfoSalGAIL models
reached the target objectives, namely street crossing
and navigation to the Goal area, in 92, 3% of simu-
lated scenarios. Moreover, in ∼ 50% of safe simu-
lated scenarios, despite unbalanced input data distri-
bution (on average, a single complete trajectory con-
tains ∼ 15% of crosswalk visual demonstrations) the
trained model even managed to mimic an exact expert
style of navigation, e.g. street crossing through cross-
walk. In the remaining simulated safe cases, the short-
est path to cross the street while taking into the con-
sideration approaching vehicles (head turns towards
vehicles) has been generated by π
θIn f oSalGAIL
(which
might also be considered as a subclass of a safe nav-
igation). The PCA plots (given the policy generator
output vector) on Figure 12 (upper vs bottom rows)
in Appendix confirms the high similarity between the
principal components of ground truth and generated
by InfoSalGAIL framework data, where the numeri-
cal representation of principal components and corre-
sponding variations are summarized in Table 2 in Ap-
pendix. Nevertheless, the collision with a vehicle still
occurred. Such an anomaly can be caused by the in-
put data distribution used in the process of training of
saliency generator, where a dataset including (evenly
distributed) accident cases is required for more accu-
rate visual attention map estimation. In the case of
unsafe simulation, the policy generator π
θIn f oSalGAIL
reached the street crossing target in 100% of simu-
lated cases. However, only in > 86% of simulated
scenarios, the goal area has been reached, where in
the process of simulation both the near-miss as well
as the collision with the vehicles took place (indicated
by negative surrogate reward explicitly obtained from
simulated environment). To support plotted trajecto-
ries (cf. Figure 9) given GIDAS scenarios Cases 1-3
(crossing the street with an approaching vehicle from
the right), in a more intuitive manner, a video
4
, for the
purpose of performance demonstration of InfoGAIL
and InfoSalGAIL, has been recorded. Additionally,
avatar’s FoV augmented with the visual attention map
was compiled into an animated GIF
4
].
The conducted experiments reveal that InfoSal-
GAIL outperformed InfoGAIL by utilizing additional
input information, namely expert‘s visual attention
map. Moreover, since the visual attention map is
unique for every expert, it might characterize each in-
dividual and serve as additional finger-print like fea-
ture.
The entire framework training took place by utiliz-
ing a high compute server with NVIDIA Tesla V100
4
https://www.dropbox.com/sh/smm2vxbuwwlctez/
AAD2AmcZ9kZjMEAeiHV3WMHaa?dl=0
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
333

GPU (32GB), where the CPU-memory consumption
was roughly 90GB, due to the in memory loaded
dataset of images. InfoSalGAIL framework is based
on TensorFlow (version 1.15) and Keras 2.0 library,
where the connection to OpenDS has been realized
though a transmission control protocol (TCP) to guar-
antee no data loss.
5 CONCLUSIONS
In this paper, we presented a novel approach, named
InfoSalGAIL, for visual attention-empowered imita-
tion learning of pedestrian behavior in critical traffic
scenarios that can handle substantial state-space and
variations, e.g. on-street urban scenarios, to mimic
complex human-like behavior of experts in a virtual
environment. Moreover, we synthesised two classes
of navigation (cf. in Section 3) which renders InfoSal-
GAIL quite suitable for the challenge of critical traffic
scenario generation. Our experimets revealed that In-
foSalGAIL can significantly outperform the selected
baseline InfoGAIL for the given objective due to the
utilization of a saliency map and its direct impact
on the policy generator in deriving the output vector
(control actions). To support this research activity, the
functionality of the OpenDS simulation software has
been extended to allow for a pedestrian-centric con-
trol, resulting in a creation of a new dataset, which
consists of more than 140K pairs of images and cor-
responding saliency maps generated from a virtual
clone of Saarbruecken city (Germany).
Future research is concerned with an extension of
the saliency generator network by incorporating latent
variables to further differentiate between the pedes-
trian imitating avatars such in terms of age, average
speed, short term interests. In this regard, the created
benchmark will be extended with a new set of realistic
scenarios based on JAAD
5
dataset to capture ground
truth data. In general, we hope that InfoSalGAIL at-
tracts more attention to the topic of human-like behav-
ior simulation in the scope of generating critical traffic
scenarios for virtual tests and validation of collision-
free navigation methods of self-driving cars.
ACKNOWLEDGEMENTS
This research was funded by the German Federal
Ministry for Education and Research (BMBF) in the
project REACT under grant 01IW17003.
5
http://data.nvision2.eecs.yorku.ca/JAAD\ dataset
REFERENCES
Abbeel, P. and Ng, A. Y. (2004). Apprenticeship learning
via inverse reinforcement learning. In Proceedings of
the twenty-first international conference on Machine
learning, page 1.
Arjovsky, M., Chintala, S., and Bottou, L. (2017). Wasser-
stein gan. arXiv preprint arXiv:1701.07875.
Bloem, M. and Bambos, N. (2014). Infinite time horizon
maximum causal entropy inverse reinforcement learn-
ing. In 53rd IEEE Conference on Decision and Con-
trol, pages 4911–4916. IEEE.
Chen, X., Duan, Y., Houthooft, R., Schulman, J., Sutskever,
I., and Abbeel, P. (2016). Infogan: Interpretable rep-
resentation learning by information maximizing gen-
erative adversarial nets. In Advances in neural infor-
mation processing systems, pages 2172–2180.
Corbetta, M. (1998). Frontoparietal cortical networks for
directing attention and the eye to visual locations:
identical, independent, or overlapping neural sys-
tems? Proceedings of the National Academy of Sci-
ences, 95(3):831–838.
Duchi, J., Hazan, E., and Singer, Y. (2011). Adaptive sub-
gradient methods for online learning and stochastic
optimization. Journal of machine learning research,
12(7).
Englert, P. and Toussaint, M. (2018). Inverse kkt–learning
cost functions of manipulation tasks from demonstra-
tions. In Robotics Research, pages 57–72. Springer.
Ermon, S., Xue, Y., Toth, R., Dilkina, B., Bernstein, R.,
Damoulas, T., Clark, P., DeGloria, S., Mude, A.,
Barrett, C., et al. (2015). Learning large-scale dy-
namic discrete choice models of spatio-temporal pref-
erences with application to migratory pastoralism in
east africa. In Twenty-Ninth AAAI Conference on Ar-
tificial Intelligence.
Finn, C., Levine, S., and Abbeel, P. (2016). Guided cost
learning: Deep inverse optimal control via policy op-
timization. In International conference on machine
learning, pages 49–58.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
Hausman, K., Chebotar, Y., Schaal, S., Sukhatme, G., and
Lim, J. J. (2017). Multi-modal imitation learning from
unstructured demonstrations using generative adver-
sarial nets. In Advances in Neural Information Pro-
cessing Systems, pages 1235–1245.
Ho, J. and Ermon, S. (2016). Generative adversarial im-
itation learning. In Advances in neural information
processing systems, pages 4565–4573.
Ho, J., Gupta, J., and Ermon, S. (2016). Model-free imi-
tation learning with policy optimization. In Interna-
tional Conference on Machine Learning, pages 2760–
2769.
Jolliffe, I. (2003). Principal component analysis. Techno-
metrics, 45(3):276.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
334

Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Li, Y., Song, J., and Ermon, S. (2017). Infogail: In-
terpretable imitation learning from visual demonstra-
tions. In Advances in Neural Information Processing
Systems, pages 3812–3822.
Pan, J., Ferrer, C. C., McGuinness, K., O’Connor, N. E.,
Torres, J., Sayrol, E., and Giro-i Nieto, X. (2017). Sal-
gan: Visual saliency prediction with generative adver-
sarial networks. arXiv preprint arXiv:1701.01081.
Pomerleau, D. A. (1989). Alvinn: An autonomous land
vehicle in a neural network. In Advances in neural
information processing systems, pages 305–313.
Pusse, F. and Klusch, M. (2019). Hybrid online pomdp
planning and deep reinforcement learning for safer
self-driving cars. In 2019 IEEE Intelligent Vehicles
Symposium (IV), pages 1013–1020. IEEE.
Ross, S. and Bagnell, D. (2010). Efficient reductions for
imitation learning. In Proceedings of the thirteenth
international conference on artificial intelligence and
statistics, pages 661–668.
Ross, S., Gordon, G., and Bagnell, D. (2011). A reduc-
tion of imitation learning and structured prediction
to no-regret online learning. In Proceedings of the
fourteenth international conference on artificial intel-
ligence and statistics, pages 627–635.
Schulman, J., Levine, S., Abbeel, P., Jordan, M., and
Moritz, P. (2015). Trust region policy optimization. In
International conference on machine learning, pages
1889–1897.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Stadie, B. C., Abbeel, P., and Sutskever, I. (2017).
Third-person imitation learning. arXiv preprint
arXiv:1703.01703.
Sully, J. (1891). W. james, the principles of psychology.
Syed, U., Bowling, M., and Schapire, R. E. (2008). Ap-
prenticeship learning using linear programming. In
Proceedings of the 25th international conference on
Machine learning, pages 1032–1039.
Ziebart, B. D., Maas, A. L., Bagnell, J. A., and Dey,
A. K. (2008). Maximum entropy inverse reinforce-
ment learning. In Aaai, volume 8, pages 1433–1438.
Chicago, IL, USA.
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
335

APPENDIX
Figure 10: Visual Attention-Empowered Discriminator Network architecture. The input image together with the correspond-
ing saliency map of the size 224× 224 × 3 are passed through a set of convolutional layers in order to derive feature maps for
later merging (AVG). Thus, features empowered with the saliency map become more valuable. The memory, represented in
the form of XML files are used as auxiliary information in the process of training, where 4d vector of actions generated by
the Policy generator is given as additional input. The ground truth data, obtained during the dataset creation phase (recordings
of expert visual demonstrations and corresponding saliency maps), passed through the identical network to identify the origin
of the input (synthetic or ground truth). The goal is to reach the maximum uncertainty state as an output of Discriminator
network.
Figure 11: Visual Attention-Empowered Posterior Estimator Network architecture. The input image of size 224 × 224 × 3
together with the saliency map are passed through a set of convolutional layers in order to derive feature maps for later merging
(AVG). Thus, features empowered with the saliency map become more valuable. The memory, represented in the form of
XML files are used as auxiliary information in the process of the training, where 4d vector of actions generated by the Policy
generator is given as additional input. The objective of this network is to derive latent variable (navigation style, e.g. safe or
unsafe) without explicitly proving an optimal reward function since it is a challenge on it‘s own.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
336
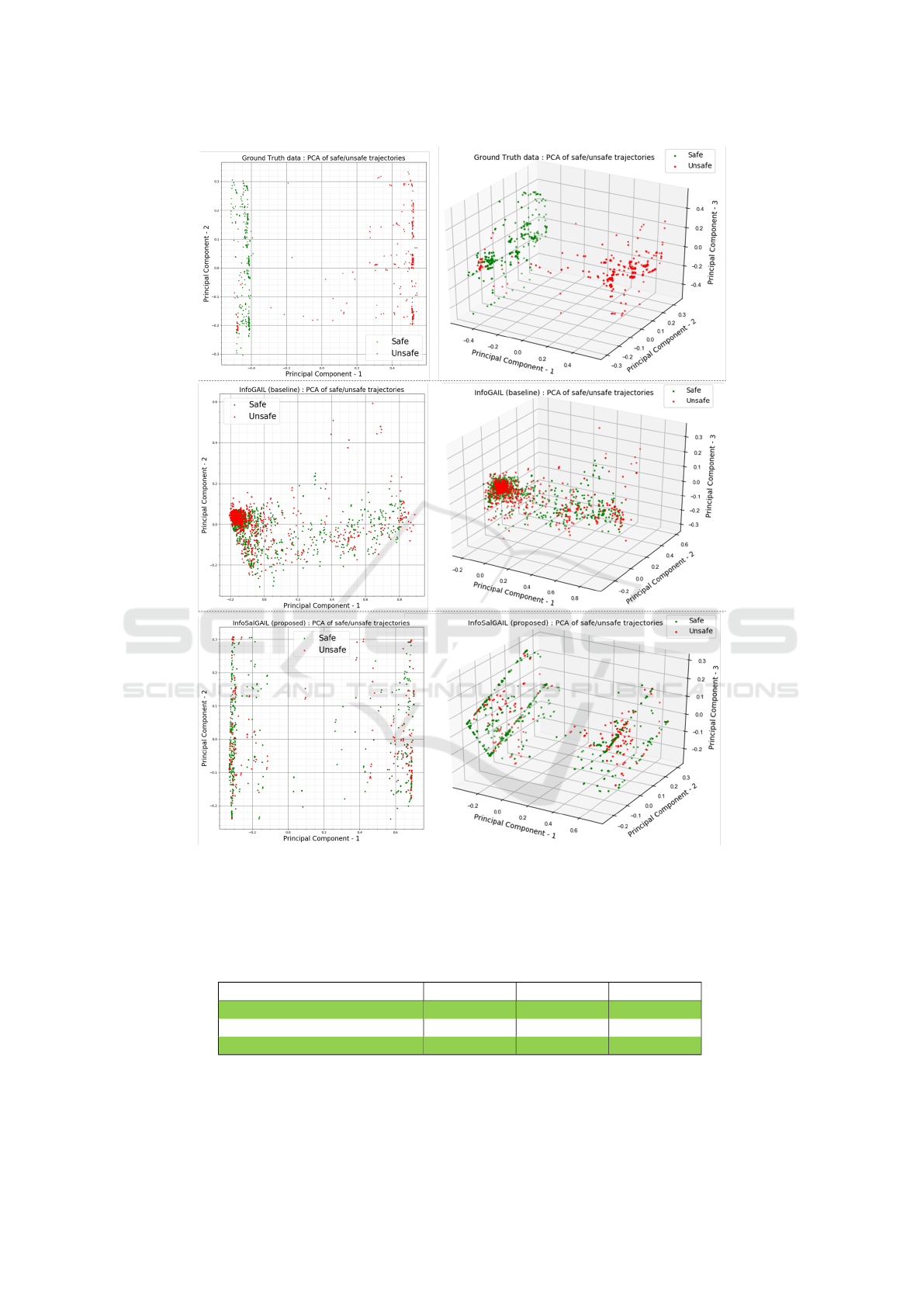
Figure 12: The numerical evaluation of the output vector using dimension reduction approach of PCA. Top row: expert ground
truth data; middle row: InfoGAIL (baseline) generated data; bottom row: InfoSalGAIL (proposed) generated data. The red
dots characterise unsafe navigation style, where green dots represent a safe one. As seen from InfoGAIL plots, the model
fails to generalize problem objective. Thus, resulting in generating very similar trajectories for both types of navigation. In
contract, the PCA visualization of the output vector of InfoSalGAIL policy generator looks comparable to the ground truth
data, which is confirmed from the plotted trajectories in Figure 9.
Table 2: Variation per principal component given output vector, e.g. turning angle, speed, pitch, and yaw.
Data / Principal Component 1 2 3
Ground Truth (expert) 0.81556843 0.09826111 0.06400615
InfoGAIL (baseline) 0.87912261 0.08173591 0.02932816
InfoSalGAIL (proposed) 0.8115204 0.10881166 0.06633512
InfoSalGAIL: Visual Attention-empowered Imitation Learning of Pedestrian Behavior in Critical Traffic Scenarios
337
