
Ontology-based Processing of Dynamic Maps in Automated Driving
Haonan Qiu
1,2
, Adel Ayara
1
and Birte Glimm
2
1
BMW Car IT GmbH, Ulm, Germany
2
Institute of Artificial Intelligence, University of Ulm, Germany
Keywords:
Autonomous Driving, Digital Maps, Ontologies, Rules, Knowledge Representation.
Abstract:
Autonomous cars act in a highly dynamic environment and consistently have to provide safety and comfort
to the passengers. For a car to understand its surroundings, a detailed, high-definition digital map is needed,
which acts as a powerful virtual “sensor”. Compared to traditional digital maps, high-definition maps require
significantly more storage space, which makes it largely impossible to store a complete map in a navigation
system. Furthermore, map data is provided in numerous heterogeneous formats. Consequently, interoper-
ability and scalability have become the main challenges of existing map processing solutions. We address
these challenges by providing an interoperable knowledge-spatial architecture layer based on ontologies and
confirm the scalability in an empirical evaluation.
1 INTRODUCTION
In 1990, a digital map was used for the first time
in a built-in GPS-based navigation system offered
by Mazda Eunos Cosmos cars (Leite, 2018). In the
2000s, great effort has been made to develop en-
hanced digital maps for supporting Advanced Driver
Assistance Systems (ADAS). Enhanced digital maps
are low-resolution maps containing road geometry
and road attributes, such as road width and speed limit
for ADAS at road level. We refer to enhanced digital
maps as standard definition (SD) maps. Autonomous
vehicles need, however, maps with a higher level of
detail than what SD maps typically offer. In 2010,
the concept of a “high-definition map” was introduced
during a research workshop and such maps were then
used in 2013 in the Bertha Drive Project (Herrtwich,
2018).
In contrast to SD maps, high-definition (HD) maps
provide detailed information at lane level to support
vehicle perception and localisation (Gruyer et al.,
2016). Based on the functional system architecture of
an automated driving system by Ulbrich et al. (2017),
HD maps with localisation functionality provide in-
puts to the perception module for world modelling,
and eventually support the decision making of the
planning and control module. Almost all players in
the area of highly automated driving, e.g., Google,
HERE, TomTom, Baidu, BMW, or Toyota, rely on
HD maps to further improve the driving capabilities
of their autonomous vehicles.
Recently, collective efforts have been made to-
wards standardising HD maps, such as Geographic
Data File (GDF) 5.1 at international level (ISO/TC
204, 2018) or Navigation Data Standard (NDS) and
the ADASIS protocol V3 at industrial level (NDS
Association, 2018). There are also national efforts
for developing HD map standards, such as the China
Industry Innovation Alliance for the Intelligent and
Connected Vehicles (CAICV). However, as of now,
there is no single, authoritative format or standard
for HD maps. As a result, map model development,
maintenance, and integration, as well as map data ex-
change and sharing pose major challenges in practise.
HD maps are extremely detailed and, therefore,
require significantly more processing power and com-
putation resources compared to SD maps. This makes
it largely impossible to store a complete detailed map
within a vehicle’s navigation system. Hence, the nav-
igation system needs to constantly request map data
streams while the car is progressing along a route and
care has to be taken to provide any relevant informa-
tion in time.
Summing up, the characteristics of HD maps re-
quire a novel approach that allows for a generic repre-
sentation of the road environment and a dynamic up-
date mechanism. Ontology-based road environment
modeling has gained growing interest for this pur-
pose in the Intelligent Transportation Systems com-
munity (Katsumi and Fox, 2018; Chen and Kloul,
98
Qiu, H., Ayara, A. and Glimm, B.
Ontology-based Processing of Dynamic Maps in Automated Driving.
DOI: 10.5220/0010133900980107
In Proceedings of the 12th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2020) - Volume 2: KEOD, pages 98-107
ISBN: 978-989-758-474-9
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2018; Bagschik et al., 2018), e.g., for road models that
provide different features for specific application re-
quirements (Zhao et al., 2017; Armand et al., 2017)
and for spatial knowledge representation and reason-
ing for navigation and path planning (Belouaer et al.,
2010; Hudelot et al., 2008).
In this paper, we address the challenge of dynam-
ically updating the map data used within the naviga-
tion system of autonomous vehicles. The main con-
tributions are as follows:
– We propose a knowledge-spatial architecture,
based on OWL 2 RL ontologies (Hitzler et al.,
2009), Datalog rules (Abiteboul et al., 1995),
and SPARQL queries (W3C SPARQL Work-
ing Group, 2013), to deal with both knowledge
abstraction and spatial reasoning on map data
streams.
– We present a categorisation of the types of rules
that are needed for knowledge abstraction and
spatial reasoning.
– We propose the use of spatial window queries for
continuous knowledge updates. Spatial windows
contain an object, if the object satisfies a certain
spatial query.
– We evaluate the approach for dynamic map up-
dates in a high way scenario within our prototype
called SmartMapApp.
The remainder of this article is structured as follows:
First, we present some background knowledge about
map data concepts and ontological modelling in Sec-
tion 2. In Section 3, we introduce the knowledge-
spatial architecture in detail. In Section 4, we evaluate
the approach. We then briefly discuss the designing
choices between SPARQL and Datalog in Section 5.
Finally, we give conclusion in Section 6.
2 PRELIMINARIES
In this section, we first briefly describe the map data
model. Then we provide an introduction to ontolo-
gies, rules and SPARQL.
2.1 Map Data
Conceptually, HD maps mainly contain three layers:
the road model, the lane model, and the localisation
model, while SD maps only cover the road model.
The road and the lane model layers are very impor-
tant since they contain the semantics of the road and
lane segments. The road model contains parts of the
road that are not part of the lanes, such as edges of the
road. It uses an ordered sequence of shape points that
describe the geometry of a polyline in the direction of
the road. Each road segment has a start and an end
node, which belong to the intersection at the start and
end of the road.
However, since autonomous vehicles are designed
to center themselves in the lane, in reality, au-
tonomous vehicles only need to deal with the lane
model except on rare occasions when they need to
travel outside the lane boundaries. The lane model
includes information on lane geometries (boundaries,
width, curvature, etc.), lane connectivity, lane type
(vehicle lane, exit lane, etc.), travel direction, lane
marking types (solid/dashed, single/double. etc.), and
speed limits. The lane geometry determines the accu-
racy, storage efficiency and usability of the HD maps
(Gwon et al., 2017). We refer the interested reader to
the literature for further details about HD maps (Liu
et al., 2020; Gran, 2019).
In practise, different companies provide maps in
their own format and structure. Table 1 shows exam-
ples of the differences between two HD map formats,
namely the HERE map content format and the NDS
format. The first two columns show the differences
in naming conventions, while the later two columns
show the differences in definitions.
2.2 Ontologies
Studer et al. (1998) define an ontology as a “a formal,
explicit specification of a shared conceptualization”.
More concretely, an ontology describes concepts and
relations that are relevant to the modeling of a do-
main of interest. The three main building blocks of
an ontology are: 1) Classes (aka concepts), which are
representations of the concepts of the domain that the
ontology aims to describe (e.g., Lane); 2) Individu-
als, which represent concrete entities in the applica-
tion domain (e.g., lane1); 3) Properties, which repre-
sent attributes of and relationships between individu-
als (e.g., hasLength or hasDirectLeft). Properties are
divided into object and data properties. Object prop-
erties are binary relationships between two individu-
als, while data properties relate individuals to literal-
s/concrete data values (e.g., an integer value). Finally,
an ontology is a set of axioms, i.e., general statements
(e.g., stating that LeftMostLane is a subclass of Lane)
and concrete facts (e.g., hasDirectLeft(lane1, lane2) or
Lane(lane1)) about the application domain described
using classes, properties and individuals.
The Web Ontology Language (OWL) is a for-
mal language designed to model complex knowledge.
OWL 2 RL is a fragment (aka profile) of OWL de-
signed for handling large amounts of data/facts, where
Ontology-based Processing of Dynamic Maps in Automated Driving
99

Table 1: Examples of differences in HD map formats.
Point Road Part Numbering of Lanes Lane Forming/Ending
HERE node segment left to right #lanes changes
NDS shape point link curbside to middle #lanes changes & physically separated
implicit facts can be derived via rule-based reason-
ing. Ontologies can be specified using the Resource
Description Framework (RDF), where the axioms
are written as subject-predicate-object triples using
IRIs, blank nodes (representing existentially quanti-
fied variables) and literal values. For example, the fact
Lane(lane1) is written as :lane1 rdf:type :Lane in RDF
assuming suitable prefix declarations for the IRIs.
2.3 Rules
Rules can be used to axiomatise the semantics of a
particular Web ontology language, e.g., OWL 2 RL,
via a static set of rules or, using datalog rules, users
can create custom rule sets. In order to define datalog
rules, we fix countable, disjoint sets of constants and
variables. A term is a constant or a variable. An atom
has the form P(t
1
,... ,t
k
), where P is a k-ary predi-
cate and each t
i
, 1 ≤ i ≤ k, is a term. We focus on
unary and binary atoms only (i.e., 1 ≤ k ≤ 2), which
correspond to classes and properties of the ontology,
respectively. An atom is ground if it does not contain
variables. A fact is a ground atom and a dataset is
a finite set of facts, e.g., as defined in an ontology.
A datalog rule is a logical implication of the form
H
1
,. .. ,H
j
← B
1
,. .. ,B
k
, where each H
i
, 1 ≤ i ≤ j, is
a head atom, and each B
`
, 1 ≤ ` ≤ k, is a body atom.
A datalog program is a finite set of rules. The con-
sequents (head) of the rule are true, if all body atoms
of a rule are true. The main computational problem
in datalog systems is answering queries over the facts
that logically follow from the explicitly stated facts
and a datalog program.
A negative body atom has the form, NOT EXISTS
v
1
, . . . , v
j
IN B, where each v
i
, 1 ≤ i ≤ j, is a vari-
able and B is an atom. A rule r is safe if variables that
appear in the head or in a negative body atom also
appear in a positive body atom. A safe datalog rule
can be extended with stratified negation by extend-
ing the rule to have negative body atoms, where there
is no cyclic dependency between any predicate and a
negated predicate.
An aggregate is a function that takes a multi-
set of values as input and returns a single value
as output. An aggregate atom has the form
Aggregate(B
1
,. .. ,B
k
ON x
1
,. .. ,x
j
BIND f
1
(e
1
) AS
r
1
.. . BIND f
n
(e
n
) AS r
n
), where each B
i
, 1 ≤ i ≤ k, is
an atom, each x
u
, 1 ≤ u ≤ j, is a variable that appears
in B
i
, each f
v
, 1 ≤ v ≤ n, is an aggregate function,
each e
w
, 1 ≤ w ≤ n, is an expression containing vari-
ables from B
i
, and each r
z
, 1 ≤ z ≤ n, is a constant for
a variable that does not appear in B
i
.
2.4 SPARQL
SPARQL is a query language for RDF graphs based
on pattern matching. For example, the query
SELECT ? l WHERE
{ ? l rd f : type : L e f t M o st L a n e }
selects all individuals that are instances of the class
:LeftMostLane. Note that we omit prefix declara-
tions and we assume the queries to be evaluated over a
pre-defined dataset in an RDF datastore. SPARQL 1.1
is the latest version supporting subqueries, value as-
signment, path expressions, aggregates, negation via
FILTER NOT EXISTS and derivation of RDF nodes
via BIND (W3C SPARQL Working Group, 2013). It
also provides operations that update, create and re-
move data.
2.5 SKOLEM
Skolem functions allow dynamically generate “fresh"
IRIs for blank nodes, called Skolem IRIs. Sys-
tems use Skolem IRIs “should mint a new, globally
unique IRI (a Skolem IRI) for each blank node so
replaced."(Cyganiak et al., 2014) The Skolem func-
tion takes the form as SKOLEM("s", v
1
,. .. ,v
k
), where
s is a arbitrary string and each v
i
, 1 ≤ i ≤ k, is a
variable appearing in the rule body. Skolem IRIs
are implemented using hasing schemes of various
lengths (Hogan, 2015). BIND function assgins the
Skolem IRI to an new variable. It takes the form
as BIND(SKOLEM("s", v
1
,. .. ,v
k
) AS n), where n is the
new variable holds the Skolem IRI.
3 A KNOWLEDGE-SPATIAL
ARCHITECTURE
In this section, we present the knowledge-spatial ar-
chitecture that enables autonomous vehicles to per-
ceive their environment with a dynamic map. We then
explain the two-level ontologies and related rules pat-
terns for knowledge abstraction and discuss how spa-
tial reasoning interacts with knowledge abstraction.
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
100
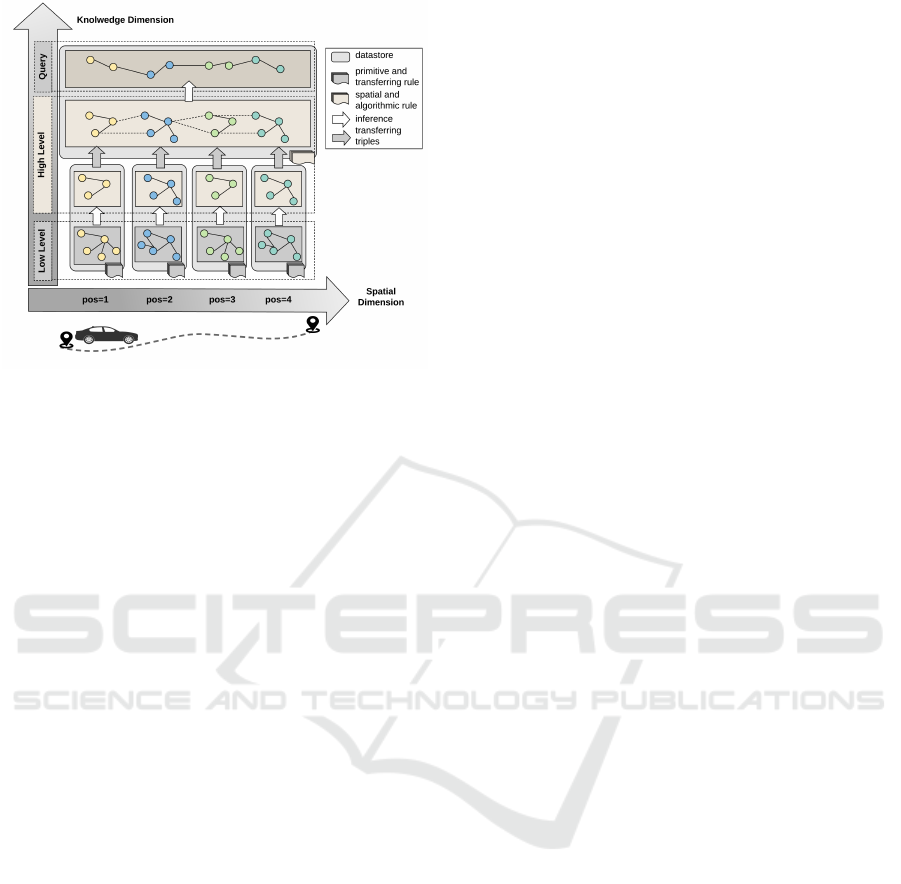
Figure 1: The overview of knowledge-spatial architecture.
3.1 Architecture Overview
Figure 1 depicts the overall knowledge architec-
ture. Inspired by the Global Ontology Approach
(Wache et al., 2001), we perform a knowledge ab-
straction process across the knowledge dimension
(vertical axis) from the format-specific and detailed
low-level ontologies to the generic high-level on-
tology. The horizontal (time) axis represents road
knowledge acquisition events, which trigger the
knowledge abstraction process via spatial reasoning.
Spatial reasoning considers updated vehicle motion
events determined in the knowledge abstraction pro-
cess and searches for spatial patterns to derive the rel-
evant consequences of what is happening on the road.
Different low-level ontologies for the different map
formats can be used to feed the high-level ontology,
which makes the proposed architecture very flexible
as application-oriented queries, such as ADAS func-
tions, are posed over the generic high-level ontology
(Suryawanshi et al., 2019; Qiu et al., 2020).
The spatial dimension is orthogonal to the knowl-
edge dimension and correlates facts that are true
within a certain space. It describes the continu-
ous spatial reasoning process with respect to the up-
dated vehicle position and dynamic road environmen-
tal knowledge. We adopt the notion of a spatial win-
dow with a fixed width or region in terms of a geo-
graphic element shift (slide) over a path line. Inspired
by Mokbel et al. (2005), we use the notion of spatial
expiration depending on the spatial location of a mov-
ing object, e.g., a vehicle, and stored data expires only
when the object leaves the spatial window.
Location-aware environments are, by nature,
highly dynamic and the size of spatial streams is po-
tentially infinite. To deal with this challenge, certain
spacial events (e.g., the available map foresight of the
vehicle reaches a threshold) trigger the initialisation
of a new datastore for a low-level ontology. The next
map data region is loaded (as defined by the specific
map data format) and used to generate more abstract,
high-level knowledge. While the high-level datastore
uses spatial expiration for deletions, a low-level data-
store is discarded once the high-level datastore is pop-
ulated.
3.2 Rule Classification
Rules play a key role for knowledge abstraction and
spatial reasoning. The main challenges for rule mod-
elling are to (1) enrich instances at the primitive level;
(2) transfer low-level ontologies with different con-
cept definitions to a unified high-level ontology; (3)
derive spatial relations for spatial reasoning; (4) cap-
ture decision-making algorithms in rules.
Based on the challenges mentioned above, we
classify rules into (1) primitive, (2) transfer, (3) spa-
cial and (4) algorithmic rules and we describe the four
categories with sub-categories, examples and more
formal rule patterns below. In the formal patterns,
we use (possibly with subscripts) C for classes, op
for object properties, and dp for data properties of the
ontology over which the rules are to be executed.
3.2.1 Primitive Rules
These rules enrich instances with one-step inferences
and their results serve as input for all other rules.
Primitive rules use the identifiers to infer the relation-
ships or attributes and are divided into primitive rela-
tionship rules and primitive attribute rules.
(a) Primitive relationship rules infer relationships be-
tween individuals. For a concrete example consider:
hasLane(x, y) ← RoadPart(x), hasIdx(x, i),
Lane(y), hasIdx(y,i).
More generally, such rules have the form
op(x, y) ← C
1
(x), dp(x, z), C
2
(y), dp(y,z)
(b) Primitive attribute rules infer an attribute of an in-
dividual. For a concrete example consider:
speed(x, v) ← Node(x), hasIdx(x, i),
speedVal(y,v), hasIdx(y,i).
More generally, such rules have the form
dp(x, v) ← C(x), dp
1
(x, z), dp
2
(y, v), dp
1
(y, z).
Ontology-based Processing of Dynamic Maps in Automated Driving
101

3.2.2 Transfer Rules
These rules create a new individual in one ontology
(typically the high-level ontology) based on one or
more individuals in another ontology (typically a low-
level ontology). SKOLEM functions and string ma-
nipulations are used to dynamically generate named
(not anonymous) individuals (Shaw et al., 2011). The
rules are further divided into simple (1:1) and complex
(n:1) transfer rules according to instance correspon-
dence.
(a) Simple rules create, for each individual of a cer-
tain type in one ontology, a new individual of a cer-
tain type in another ontology. For a concrete example,
consider:
RoadPar t(r), hasPoint(r, s), length(r,l) ←
Link(k), hasShapePoint(k,s),
length(k, l), BIND(SKOLEM("rp", k) AS r).
More generally, such rules have the form
C
2
(n), op
2
(n,u), dp
2
(n,v) ←
C
1
(x), op
1
(x, u), dp
1
(x, v),
BIND(SKOLEM("c", x) AS n),
where C
1
, op
1
, and dp
1
are from one ontology and C
2
,
op
2
, and dp
2
are from another ontology.
(b) Complex rules create a new individual in one on-
tology based on several individuals in another ontol-
ogy and, hence, perform an aggregation process. As
a concrete example, consider the rule
Lane(l) ← Lane(l
1
), Lane(l
2
),
laneNum(l
1
,n), laneNum(l
2
,n),
hasConn(l
1
,c), hasConn(l
2
,c),
BIND(SKOLEM("l", c) AS l).
More generally, such rules have the form
C
2
(w) ← C
1
(x), C
1
(y),
dp
1
(x, v), dp
1
(y, v),
op
1
(y, z), op
1
(y, z),
BIND(SKOLEM("c", z) AS w).
3.2.3 Spatial Rules
These rules infer important road environmental
knowledge for vehicle navigation (Gayathri and V.,
2018). We further subdivide them into bounding
rules, topological rules and distance rules.
(a) Bounding rules infer the boundaries of an area or
the range of a line, such as a start/end point or the left
or right-most lane. Aggregation functions (e.g., MIN
or MAX) can be used to identify an individual with a
minimal or maximal bounding value. As a concrete
example, consider:
LeftMostLane(z) ← Lane(p),
AGGREGATE(hasIdx(p, idx)
ON p BIND MAX(idx) AS m),
Lane(z), hasIdx(z, m).
More generally, such rules have the form
C
2
(z) ← C
1
(x), AGGREGATE(dp
1
(x, v) ON x
BIND MAX(v) AS m), C
1
(z), dp
1
(z,m).
Such rules might also use (stratified) negation to
identify individuals without some properties:
EndLane(x) ← Lane(x), NOT EXISTS y IN
(Lane(y), hasNext(x, y))
More generally, such rules have the form
C
2
(x) ← C
1
(x), NOT EXISTS y IN (C
1
(y), op
1
(x, y)).
(b) Topological rules refer to topological relations,
more specifically, lateral (left/right) and longitudinal
(predecessor/successor) relations. Reachability can
naturally be expressed using recursive rules.
hasLeft(x, y) ← hasDirectLeft(x,y)
hasLeft(x, z) ← hasDirectLeft(x,y), hasLeft(y,z).
More generally, such rules have the form
op
1
(x, y) ← op
2
(x, y)
op
1
(x, z) ← op
2
(x, y), op
1
(y, z)
(c) Distance rules refer to the spatial arrangement of
objects, such as the distance to a point of interest.
There are two types of distance relations: coordinate
distance and length distance.
Coordinate distance rules indicate the distance
between two points using coordinates. An auxiliary
concept (CoordinateDistance) represents the ternary
relation that connects the source point to the target
point via two object properties hasSource and
hasTarget and the calculated distance value via the
data property distance:
CoordinateDistance(d), hasSource(d, s),
hasTarget(d,t), distance(d, z) ←
Point(s), x(s,x
s
), y(s, y
s
),
Point(t), x(t,x
t
), y(t, y
t
),
BIND(sqrt((x
s
− x
t
)
2
+(y
s
− y
t
)
2
) AS z),
BIND(SKOLEM("d", s, t) AS d).
More generally, such rules have the following form,
where A represents the auxiliary concept:
A(d), hasSource(d, s),
hasTarget(d,t), distance(d, z) ←
C
1
(s), x(s, x
s
), y(s, y
s
),
C
1
(t), x(t, x
t
), y(t, y
t
),
BIND(sqrt((x
s
− x
t
)
2
+(y
s
− y
t
)
2
) AS z),
BIND(SKOLEM("d", s, t) AS d).
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
102
Length distance rules are similar to coordinate
distance rules, but the distance is calculated by
aggregating the length of intermediate path elements
between two points. As a concrete example consider:
LengthDistance(d), hasSource(d, s),
hasTarget(d,t), distance(d, z) ←
Lane(s), length(s, v),
AGGREGATE(hasNext(s, p), hasNext(p,t)),
length(p, l) ON s BIND SUM(l) AS u),
BIND((v + u) AS z),
BIND(SKOLEM(" f ", s, t) AS d).
More generally, such rules have the form
A(d), hasSource(d, s),
hasTarget(d,t), distance(d, z) ←
C
1
(s), length(s, v),
AGGREGATE(op
1
(s, p), op
1
(p,t)),
length(p, l) ON s BIND SUM(l) AS u),
BIND((v + u) AS z),
BIND(SKOLEM(" f ", s, t) AS d).
3.2.4 Algorithmic Rules
These rules are used for decision making and vehi-
cle motion planning, e.g., for determining the most
probable path that a vehicle will take, for providing
lane-change notifications and for pre-fetching tiles.
The rules are modelled as a combination of rules of
different type, possibly requiring a specific rule order
(Suryawanshi et al., 2019; Qiu et al., 2020).
3.3 Knowledge Dimension: Two Levels
of Ontologies
To performance a knowledge abstraction process,
there are three main components involved, namely
low-level ontologies, a high-level ontology and rules.
The low-level ontologies represent the different map
data formats. The primitive rules produce the basic
semantics of instances at the low level. These ba-
sic semantics are the fundamental ingredients for the
transfer rules, which generate instances in the defined
high-level ontology. The high-level ontology repre-
sents a generic and unified road environment model.
Spatial and algorithmic rules are used to reason over
the high-level ontology and provide the necessary
knowledge for decision making and vehicle motion
planing.
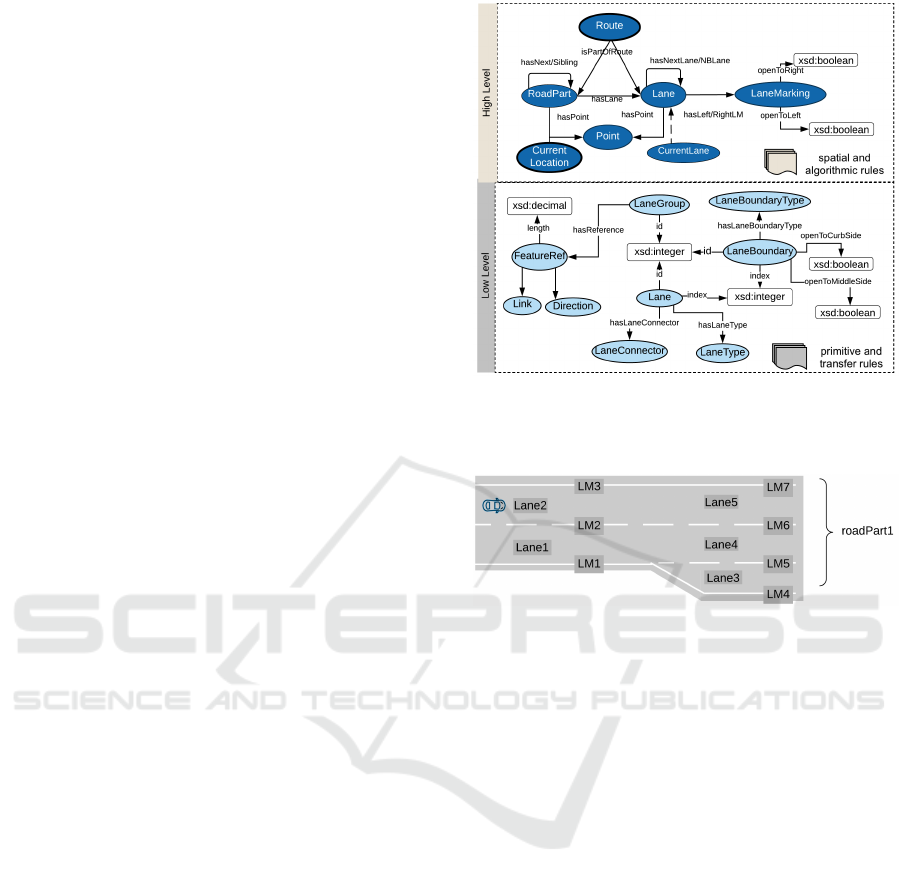
Figure 2 shows some of the concepts and rela-
tions of the high-level ontology and a low-level on-
tology representing HD map data based on the NDS
specification. A LaneGroup is a set of one or more
lanes on a part of a link. A Lane is connected to
another lane via a LaneConnector. A LaneBound-
Figure 2: Overview of the two levels of ontologies for rep-
resenting map data; hasNBLane stands for hasNeighbour-
ingLane; hasLeftLM stands for hasLeftLaneMarking.
Figure 3: An example of a segment of a road and its lanes
and lane markings (LM).
ary is a line that separates lanes with type and colour
information. The corresponding high-level concepts
of Lane and LaneBoundary are Lane and LaneMark-
ing, respectively, and the instances of both concepts
are generated through low-level instances. The corre-
sponding high-level concept of Link is RoadPart and
its instances are generated through the instances of
Link. At the high level, the spatial relations among
Lane and RoadPart are essential for maintaining dy-
namic high-level road environmental knowledge (see
Figure 3). Figure 4 is a graph representation of the
example shown in Figure 3.
3.4 Spatial Dimension
With the volume and velocity of map data streams,
it becomes infeasible to store and process all avail-
able information. Hence, only some portion of the
available knowledge is stored in memory and only for
a limited area. The choice of the stored knowledge
is primarily dependent on continuous spatial queries.
In addition, we adopt a mechanism to expire (delete)
some of the stored knowledge and add information
relevant to answer decision-making queries. In our
approach, we employ a spatial window policy, where
Ontology-based Processing of Dynamic Maps in Automated Driving
103
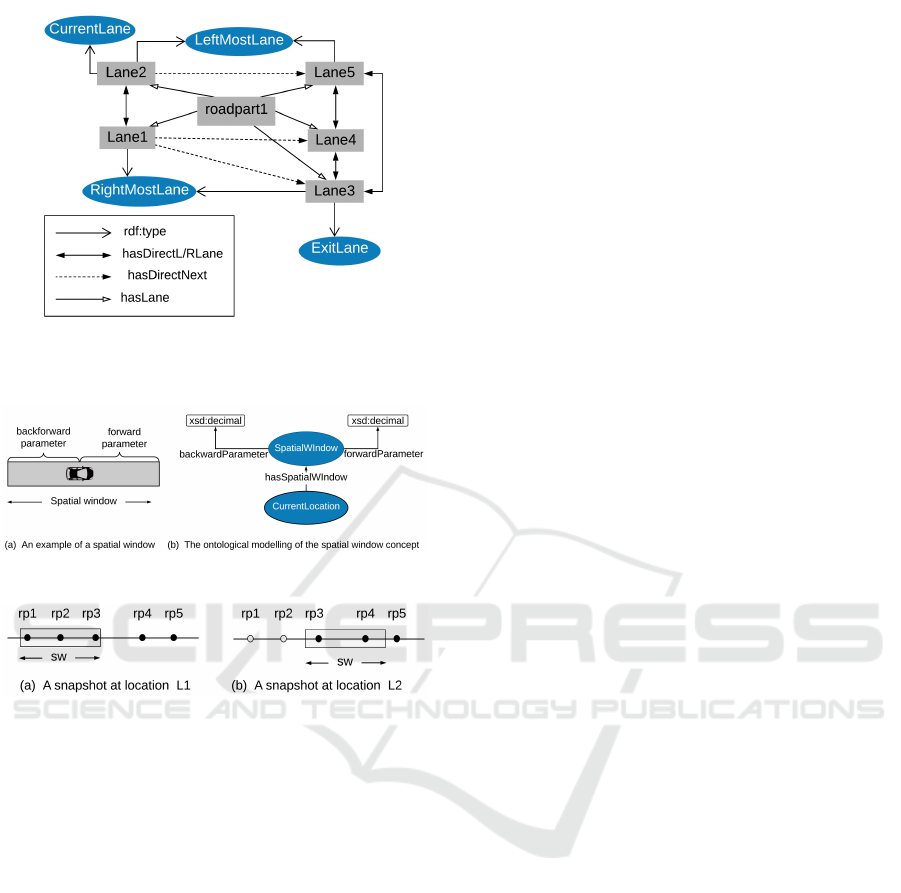
Figure 4: An example of Lane and RoadPart spatial rela-
tions; hasDirectL/RLane stands for hasDirectLeft/RightLane
corresponding to Figure 3.
Figure 5: Modelling of the spatial window.
Figure 6: A example of the spatial window (sw) with re-
spect to locations.
the spatial window is defined as a range of an area
that satisfies some spatial properties (e.g., distance)
with respect to a reference object. We use spatial
rules, namely topological and distance rules, to per-
formance spatial reasoning.
The spatial window is relevant to the vehicle loca-
tion with the forward and backward parameters (see
Figure 5 (a)). It is modelled as a class SpatialWin-
dow with two data properties forwardParameter and
backwardParameter (see Figure 5 (b)). We define the
inside object property of a road part and a spatial win-
dow using the rule
inside(r, s) ←
RoadPar t(r), distanceToVehicle(r, d),
currentLocation(c), hasSpatialWindow(c, s),
SpatialWindow(s), forwardParameter(s, f ),
backwardParameter(s,b),
FILTER(d ≤ f && d ≤ b)
The SPARQL query
SELECT ? r WHERE {
? r rdf : t ype : Road P a r t .
? r : i n s i d e : S p at i a lW i n d o w .
}
then retrieves road parts that are inside a specific Spa-
tialWindow instance.
Figures 6 (a) and (b) give two snapshots of the
vehicle environment at the locations L1 and L2. The
objects labelled rp1 – rp5 represent road parts. At the
location L1, continuous spatial queries are evaluated
over rp1 – rp3 as they are inside the spatial window.
At location L2, however, r1 – r2 move out of the spa-
tial window, which means that they are expired. rp3 is
a still valid object and rp4 is the new object inside the
spatial window. Thus, the continuous spatial queries
are evaluated over rp3 and rp4.
4 EVALUATION
In this section, we evaluate the adequacy of the pro-
posed knowledge-spatial architecture in our proto-
type called SmartMapApp. The prototype uses RD-
Fox (Oxford Semantic Technologies, 2019) for stor-
ing, querying, and reasoning over map data. Then,
we present the experimental results for the knowledge
abstraction and for the spatial reasoning process.
4.1 Use Case
In order for an autonomous vehicles to navigate safely
and to ensure the comfort and safety of its passengers,
the navigation system needs to constantly request map
data streams while the vehicle is progressing along
a route. To achieve this goal, the Advanced Driving
(AD) system runs a continuous spatial query over the
incrementally updated road environmental knowledge
to check if the system needs to pre-load map data or
delete expired road entities. The concrete scenario is
described as following.
The vehicle initialises its world view with some
low-level map data, which results in a high-level road
view. As soon as the car starts to move, it triggers a
continuous pre-fetching query with a spatial window
whose forward parameter is set to 5 km. Afterwards,
the system pre-loads data for a new map tile based on
the answer of pre-fetching query. Consequently, the
high-level road view is extended with the new spatial
knowledge. While the system incrementally updates
the road environmental knowledge, it also continu-
ously checks if any road parts are “out of window"
based on the backward parameter (e.g., 3 km) of the
spatial window. The road parts which are no longer
“inside" the spatial window are deleted.
The method for providing a dynamic road envi-
ronment along a route is shown in Figure 7. The
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
104

Figure 7: The method for updating the road environment
along a route with two parallel processes.
workflow starts with a received route and vehicle po-
sition. Next, process 1 and process 2, are started
in parallel. Process 1 (∗) determines which tiles are
required to be pre-fetched and executes the knowl-
edge abstraction process for each tile in parallel. Pro-
cess 2 (#) determines which high-level road knowl-
edge needs to be deleted. The step marked with (∗) is
modelled as SPARQL query (see Listing 1). The step
marked with (#) in process 2 is modeled as a Datalog
rule (see Listing 2). The two parallel processes repeat
for each received vehicle position.
SELECT ? t i l e I d 2 ? t i l e I d3
WHERE {
? l a : Cu r r e n tL a n e . ? rp : h a s Lane ? l .
? rp : hasNex t ? rp12 .
? rp12 : h a s Next ? rp2 2 .
? rp22 : l e n g t h ? l e n g th2 .
? rp12 : i sL o c a te d I n ? tileId2 .
? rp22 : i sL o c a te d I n ? tileId3 .
? c u rre L o c t : rem D i s O fR P ? r e ma i n in g D i s .
{ SELECT ? rp2 2 (SUM(? l e n 1 ) AS ? tL e n 1 )
WHERE {
? lane a : C u r r en t L a ne .
? rp : hasLan e ? lane .
? rp : hasNex t ? rp 1 .
? rp1 : h a s N e x t ? r p22 .
? rp1 : l e n g t h ? len1 .
}
GROUP BY ? r p 2 2
}
BIND( (? l e n g t h 2 + ? tLen1 ) AS ? t L e n 2 )
BIND( (? r e ma i n i n g D i s +? t L e n 2 ) AS ? d i s 2 )
: s pa t i a l W i n do w : f o r w ar d P ar a m e t e r ? v al .
FILTER(? d i s 2 < ? val )
}
Listing 1: A SPARQL query for pre-fetching map data tiles.
ExpiredRoadPart(r) ←
SpatialWindow(s),
NOT EXISTS r IN (RoadPart(r), inside(r, s))
Listing 2: A Datalog rule for inferring expired road parts.
4.2 Performance
We have implemented the proposed knowledge-
spatial architecture into an application called
SmartMapApp using RDFox 3.0.1 with the provided
Java APIs. The used map data covers 63.75 km
2
and
is split into 10 data sets for testing. The evaluation
was performed on a 64-bit Ubuntu virtual machine
with 8 Intel(R) Core(TM) i7-8550U CPU @ 1.80GHz
running at 33MHz with 15 GB memory. We recorded
the computation time after doing a warm-up run by
executing the tasks 3 times sequentially. The results
are shown in Figures 8 and 9.
Time (ms)
Number of Triple (10E2)
0
500
1000
1500
2000
2500
0
2500
5000
7500
10000
1 2 3 4 5 6 7 8 9 10
# low-level triples # high-level triples
low2high process time extending high-level view time
Figure 8: Performance evaluation of the knowledge abstrac-
tion process.
Figure 8 illustrates the knowledge abstraction pro-
cess. The figure shows, for each data set, the number
of low-level triples (grey bar), the resulting number
of high-level triples (black bar), the time for transfer-
ring triples from the low-level to the high-level ontol-
ogy (low2high process time, diamonds), and the time
for extending the high-level road environmental view
(dot).
position
Execution & Deletion Time (ms)
Pre-lad Time (ms)
0
50
100
150
200
0
500
1000
1500
2000
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
execution time deletion time pre-loading Time
Figure 9: Performance evaluation of the spatial reasoning
process.
Ontology-based Processing of Dynamic Maps in Automated Driving
105

Figure 9 shows an excerpt of a simulation result
along a trace. The left vertical axis shows the exe-
cution and deletion time. The execution time (line)
is under 50 ms on average. The deletion time (grey
area) is almost as low as the execution time. The right
vertical axis shows the time for the pre-loading pro-
cess (orange bar). At position 18, there is a peak of
the execution time, which is 104 ms. Additionally,
the deletion time (111 ms) and the subsequent pre-
loading time (1653 ms) are both long. This indicates
that the amount of loaded data has an impact on the
execution time.
Overall, the results demonstrate the feasibility of
our ontology-based approach to process maps dynam-
ically for autonomous vehicles. The cost of reasoning
generally depends not only on the number of rules,
but also on the complexity of the combination of cer-
tain rules and the input data. For details of how RD-
Fox performs reasoning, we refer interested readers
to the description of the RDFox materialization algo-
rithm (Motik et al., 2015).
5 DISCUSSION
Existing work has shown that Datalog can be trans-
lated to SPARQL, and vice versa (Polleres, 2007;
Maier et al., 2018) and that it is feasible to use ei-
ther SPARQL or Datalog for reasoning over streams
(Rinne and Nuutila, 2017; Margara et al., 2018). The
choice of modeling rules as Datalog or SPARQL is
a trade-off between semantic expressibility and com-
putation performance. In particular, it is beneficial
to study the evaluation mechanisms of Datalog (ma-
terialization) and SPARQL (graph pattern matching).
Having the advantages of each language in mind pro-
vides a practical guideline to modelling the knowl-
edge.
In our work, the datastores for the low-level on-
tologies need to perform the knowledge abstraction
process by means of primitive, transfer, distance and
bounding rules (see Section 3.2) without the necessity
to store the facts and inferred knowledge. Based on
our experiments, SPARQL queries outperform Data-
log rules considering the same desired ADAS func-
tions. Hence, all the rules in the low-level datastores
are modelled using SPARQL. However, the high-level
datastore needs to store the knowledge and perform
incremental updates by means of spatial reasoning.
This naturally leads to the modelling of the knowl-
edge as Datalog rules, taking advantage of incremen-
tal reasoning with Negation as Failure as supported
by RDFox.
6 CONCLUSIONS
In this paper, we present a a novel knowledge-spatial
architecture considering the knowledge and spatial di-
mension of map data streams. We discuss the pro-
cess of knowledge abstraction using two-level ontolo-
gies. We present the mechanism of spatial reasoning
for building a dynamic map using a spatial-window
concept. In particular, we describe how to utilize dif-
ferent types of rules to achieve two dimensional rea-
soning. We evaluated our SmartMapApp prototype
through a running example of providing a dynamic
map along a route using RDFox. We chose RDFox as
it is the only triple store that can deal with incremen-
tal reasoning with Negation as Failure. The results
of this paper demonstrate the feasibility of adopting
an ontology-based approach for processing map data
in autonomous vehicles by using a sophisticated rea-
soner with the desired scalability, such as RDFox.
In the future, we plan to extend the architecture
to ensure map data quality as there might be errors in
the raw map data. Expired road objects may also re-
sult in missing triples, where a future query might ask
for deleted objects. There needs to be a mechanism
to cache the expired road objects in order to provide
answers to such queries.
REFERENCES
Abiteboul, S., Hull, R., and Vianu, V. (1995). Foundations
of databases, volume 8.
Armand, A., Ibanez-Guzman, J., and Zinoune, C. (2017).
Digital Maps for Driving Assistance Systems and Au-
tonomous Driving, pages 201–244.
Bagschik, G., Menzel, T., and Maurer, M. (2018). Ontol-
ogy based scene creation for the development of auto-
mated vehicles. In IEEE Intelligent Vehicles Sympo-
sium (IV), pages 1813–1820.
Belouaer, L., Bouzid, M., and Mouaddib, A. (2010). Ontol-
ogy based spatial planning for human-robot interac-
tion. In 17th Int. Symposium on Temporal Represen-
tation and Reasoning (TIME 2010), pages 103–110,
Los Alamitos, CA, USA. IEEE Computer Society.
Chen, W. and Kloul, L. (2018). An ontology-based ap-
proach to generate the advanced driver assistance use
cases of highway traffic. In KEOD, pages 73–81.
Cyganiak, R., Wood, D., and Lanthaler, M. (2014). RDF
1.1 Concepts and Abstract Syntax. (Accessed on
09/14/2020).
Gayathri, R. and V., U. (2018). Ontology based knowledge
representation technique, domain modeling languages
and planners for robotic path planning: A survey. ICT
Express, 4(2):69 – 74.
Gran, C. W. (2019). Hd-maps in autonomous driving. Mas-
ter’s thesis, NTNU.
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
106

Gruyer, D., Belaroussi, R., and Revilloud, M. (2016). Ac-
curate lateral positioning from map data and road
marking detection. Expert Systems with Applications,
43:1–8.
Gwon, G., Hur, W., Kim, S., and Seo, S. (2017). Genera-
tion of a precise and efficient lane-level road map for
intelligent vehicle systems. IEEE Transactions on Ve-
hicular Technology, 66(6):4517–4533.
Herrtwich, R. (2018). The evolution of the HERE HD Live
Map at Daimler. (Accessed on 04/29/2020).
Hitzler, P., Krötzsch, M., Parsia, B., Patel-Schneider, P. F.,
and Rudolph, S. (27 Oct 2009). OWL 2 Web Ontology
Language: Primer (2nd Edition).
Hogan, A. (2015). Skolemising blank nodes while preserv-
ing isomorphism. In Proc. of the 24th Int. Conf. on
World Wide Web, WWW ’15, page 430–440, Repub-
lic and Canton of Geneva, CHE.
Hudelot, C., Atif, J., and Bloch, I. (2008). Fuzzy spatial
relation ontology for image interpretation. Fuzzy Sets
and Systems, 159(15):1929 – 1951. From Knowledge
Representation to Information Processing and Man-
agement.
ISO/TC 204 (2018). Intelligent transport systems-Local dy-
namic map. (Accessed on 05/27/2020).
Katsumi, M. and Fox, M. (2018). Ontologies for transporta-
tion research: A survey. Transportation Research Part
C: Emerging Technologies, 89:53 – 82.
Leite, J. (2018). A brief history of gps in-car navigation.
Liu, R., Wang, J., and Zhang, B. (2020). High definition
map for automated driving: Overview and analysis. J.
of Navigation, 73(2):324–341.
Maier, D., Tekle, K. T., Kifer, M., and Warren, D. S. (2018).
Datalog: concepts, history, and outlook. In Declara-
tive Logic Programming: Theory, Systems, and Appli-
cations, pages 3–100. ACM Books.
Margara, A., Cugola, G., Collavini, D., and Dell’Aglio, D.
(2018). Efficient temporal reasoning on streams of
events with dotr. In European Semantic Web Conf.,
pages 384–399.
Mokbel, M. F., Xiong, X., Hammad, M. A., and Aref,
W. G. (2005). Continuous query processing of spatio-
temporal data streams in place. GeoInformatica,
9(4):343–365.
Motik, B., Nenov, Y., Piro, R., and Horrocks, I. (2015).
Combining rewriting and incremental materialisation
maintenance for datalog programs with equality. In
Twenty-Fourth Int. Joint Conf. on Artificial Intelli-
gence.
NDS Association (2018). The standard for map data - NDS
Association. (Accessed on 05/27/2020).
Oxford Semantic Technologies (2019). RDFox knowledge
graph system.
Polleres, A. (2007). From sparql to rules (and back).
In Proc. of the 16th Int. Conf. on World Wide Web,
WWW ’07, page 787–796, New York, NY, USA.
Qiu, H., Ayara, A., and Glimm, B. (2020). A knowledge ar-
chitecture layer for map data in autonomous vehicles.
In 2020 23rd Int. Conf. on Intelligent Transportation
Systems (ITSC). IEEE.
Rinne, M. and Nuutila, E. (2017). User-Configurable Se-
mantic Data Stream Reasoning Using SPARQL Up-
date. J. on Data Semantics, 6(3):125–138.
Shaw, M., Detwiler, L. T., Noy, N., Brinkley, J., and Su-
ciu, D. (2011). vsparql: A view definition language
for the semantic web. J. of Biomedical Informatics,
44(1):102–117.
Studer, R., Benjamins, V. R., and Fensel, D. (1998). Knowl-
edge engineering: Principles and methods. Data &
Knowledge Engineering, 25(1-2):161–197.
Suryawanshi, Y., Qiu, H., Ayara, A., and Glimm, B. (2019).
An ontological model for map data in automotive sys-
tems. In IEEE Int. Conf. on Artificial Intelligence and
Knowledge Engineering (AIKE), pages 140–147.
Ulbrich, S., Reschka, A., Rieken, J., Ernst, S., Bagschik,
G., Dierkes, F., Nolte, M., and Maurer, M. (2017). To-
wards a functional system architecture for automated
vehicles. arXiv preprint arXiv:1703.08557.
W3C SPARQL Working Group (21 Mar 2013). SPARQL
1.1 Overview.
Wache, H., Voegele, T., Visser, U., Stuckenschmidt, H.,
Schuster, G., Neumann, H., and Hübner, S. (2001).
Ontology-based integration of information-a survey of
existing approaches.
Zhao, L., Ichise, R., Liu, Z., Mita, S., and Sasaki,
Y. (2017). Ontology-based driving decision mak-
ing: A feasibility study at uncontrolled intersec-
tions. IEICE Transactions on Information and Sys-
tems, E100.D(7):1425–1439.
Ontology-based Processing of Dynamic Maps in Automated Driving
107
