
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time
Global Illumination
Igor Aherne, Richard Davison, Gary Ushaw and Graham Morgan
School of Computing, Newcastle University, Newcastle upon Tyne, U.K.
Keywords:
Global Illumination, Voxels, Real-time Rendering, Lighting.
Abstract:
The enhancement of 3D scenes using indirect illumination brings increased realism. As indirect illumination
is computationally expensive, significant research effort has been made in lowering resource requirements
while maintaining fidelity. State-of-the-art approaches, such as voxel cone tracing, exploit the parallel nature
of the GPU to achieve real-time solutions. However, such approaches require bespoke GPU code which is
not tightly aligned to the graphics pipeline in hardware. This results in a reduced ability to leverage the latest
dedicated GPU hardware graphics techniques. In this paper we present a solution that utilises GPU supported
sparse 3D texture maps. In doing so we provide an engineered solution that is more integrated with the latest
GPU hardware than existing approaches to indirect illumination. We demonstrate that our approach not only
provides a more optimal solution, but will benefit from the planned future enhancements of sparse 3D texture
support expected in GPU development.
1 INTRODUCTION
The realism of a rendered scene is greatly enhanced
by indirect illumination - i.e. the reflection of light
from one surface in the scene to another. Achiev-
ing believable looking indirect illumination in real-
time remains a challenging prospect, as each rendered
fragment of a surface must integrate light that has
fallen on it from any direction, and that light may have
already been reflected from other surfaces within the
environment. In turn, the light reflected from those
secondary surfaces must also have been integrated
from the light arriving from multiple directions to the
secondary surface. Clearly the computational com-
plexity of the problem rises exponentially with the
number of light bounces considered. Further to this,
light that has been reflected from surfaces which are
outside the viewing frustum can still affect rendered
fragments. Consequently a technique for indirect il-
lumination must combine knowledge of the fragments
to be rendered to the screen with a model of the 3D
environment for determining visibility between arbi-
trary points in the scene.
A recently adopted approach to real-time indirect
lighting is the use of voxel cone tracing (Crassin et al.,
2011). The approach has received a lot of atten-
tion and commercial usage in high-end video game
engines (Mittring, 2012) as it computes two light-
bounces with minimal reliance on the specifics of the
original 3D mesh in the calculations (thus achieving
desirable frame-rates almost independent of the com-
plexity of the scene). The approach entails represent-
ing the scene as a hierarchical voxel structure and
storing it, on the GPU, in a dynamic sparse octree.
The octree is constructed for the scene on initialisa-
tion, and is then modified as the dynamic parts of the
scene move. The voxel cone tracing technique is then
used to estimate visibility of scene elements for cal-
culation of indirect illumination.
Sparse 3D texture mapping offers an alternative
approach for storing the hierarchical voxel representa-
tion of the scene. Sparse 3D textures provide a struc-
ture which is more suitable to the random accesses
required by the dynamic hierarchical voxel represen-
tation than that provided by a sparse octree structure.
Hardware interpolation is also available for highly ef-
ficient trilinear and bilinear interpolation of lighting
values stored in the voxelised texture at minimal soft-
ware cost. Further to this, a 3D texture may allow for
a larger scene to be represented, as it is not as con-
strained by GPU memory requirements as the sparse
octree. However, as the octree can be stored on the
GPU, access is very fast. Current graphics hardware
and SDKs are increasingly incorporating efficient 3D
texture support into their design, so the speed of ac-
cess is improving with each generation of graphics
Aherne, I., Davison, R., Ushaw, G. and Morgan, G.
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time Global Illumination.
DOI: 10.5220/0008874502010209
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
201-209
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
201

pipeline.
In this paper we present an implementation of
voxel cone tracing for global illumination which
utilises a sparse 3D texture to store the hierarchical
voxel representation of the scene. We also incorpo-
rate some further performance enhancements used in
our engineered solution, including the use of com-
pute shaders to create the mip-chain. We present
performance figures and rendered imagery which are
favourably comparable to the reference solution. We
further argue that, as graphics hardware focuses more
on utilising 3D textures, the advantages of random ac-
cess to such a structure over a sparse octree, coupled
with the potential for representation of larger scenes,
and further utility of hardware-implemented interpo-
lation, will see this approach increasingly adopted.
2 BACKGROUND AND RELATED
WORK
2.1 Real Time Global illumination
While techniques for real-time rendering are improv-
ing rapidly, they inevitably lag behind the realism
and complexity of graphical fidelity that is achievable
through off-line computation. Interactive media such
as video gaming allow the user to control the camera
in the 3D scene so calculation of the light that reaches
the camera must occur dynamically, often with the
aim of achieving 60fps on relatively low power hard-
ware. Off-line techniques for convincing indirect il-
lumination, such as ray-tracing (Kajiya, 1986) and
photon-mapping (Jensen, 2001), are well established,
and widely used in the film industry etc.
The use of reflective shadow maps (RSM) was an
early solution to modelling indirect illumination of
surfaces (Dachsbacher and Stamminger, 2005). Each
light source is allocated a shadow map, which deter-
mines the parts of the scene that are illuminated by the
light (i.e. can be seen by the light). A depth value is
stored relative to the light source, and is then used to
determine whether a rendered point in the final frus-
tum was part of the shadow map allocated to each
light source. The computation cost and the memory
required for shadow map textures increases with each
additional light source, and only single bounce illu-
mination is provided.
Increased efficiency in lighting calculation can
be achieved through the application of algorithms in
screen-space (Nichols et al., 2009). After the pixels
that are displayed in the frustum are determined, a
post-processing stage performs further lighting cal-
culations based only on the information contained
within those rendered pixels. The obvious disadvan-
tage here is that any light reflected from surfaces out-
side the frustum is discarded. Such algorithms trade
this inaccuracy off against the computational savings
afforded by the post-processing step only considering
those pixels that will definitely be rendered (Ritschel
et al., 2012). Screen space techniques have been suc-
cessfully adopted on relatively low power games con-
soles for simplified indirect illumination in the form
of screen-space ambient occlusion (Goulding et al.,
2012).
Layered global illumination (Hachisuka, 2005)
simplifies the visible geometry to be considered for
lighting calculation by introducing a series of depth-
peeled layers, extending from a number of fixed view-
points, and rendered orthographically. The fixed
points form a spherical distribution to afford better
coverage of global illumination. As the environment
is rendered orthographically, consecutive layers along
a particular direction can be used to represent the tran-
sition of light between one layer and the next. Since
each layer is a two-dimensional image, rasterisation is
readily employed, taking advantage of the parallel na-
ture of GPU computation. A computational expense
of the layered global illumination approach is the re-
quirement to project all the visible pixels onto each
layer every time it is created. Furthermore the size
of the texture required to store the layered projections
scales with the size of the environment, as the whole
entity has to be rasterised at an appropriate resolution
for each layer and from various viewing directions.
The technique results in a single bounce of light; fur-
ther light bounces requiring the entire procedure to be
repeated.
Scalable solutions to real-time illumination from
multiple light sources are described in (Dachsbacher
et al., 2014). Scalability is a key factor here with
results trading off visual fidelity against computation
time, ranging from almost real-time to tens of minutes
per rendered frame. Cascaded light propagation vol-
umes (Kaplanyan and Dachsbacher, 2010) have also
been utilised to provide a scalable solution to indirect
illumination. The approach uses lattices and spherical
harmonics to represent the spatial and angular distri-
bution of light in the rendered scene. The initial work
showed viable performance for single bounce illumi-
nation. The efficiency for multiple bounces has been
addressed with solutions including selective light up-
dates (Sund
´
en and Ropinski, 2015), and partial pre-
computation (Jendersie et al., 2016).
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
202

2.2 Voxel Cone Tracing
A technique for calculating indirect illumination must
rely on knowledge of the spacial relationship between
surfaces in the proximity of the viewing frustum.
Voxelisation has been employed successfully to rep-
resent this three-dimensional spatial information. The
voxel cone tracing technique described in (Crassin
et al., 2011) is the basis for the work presented in this
paper and provides our reference solution.
The geometry of the scene is rasterized into vox-
els, being stored in a data structure containing colours
and normals in the form of a sparse octree (Laine and
Karras, 2011). The scene’s illumination is then in-
jected into the resulting voxels and is stored in a sec-
ond structure which contains the lighting information,
particularly the incoming radiance. If the implemen-
tation stores the reflected light value instead (for sim-
pler computations, but losing specular highlights), it
is referred to as the diffuse. The lighting is then fil-
tered upwards within the structure (equivalent to mip-
mapping of a texture). Coherence within the nearby
environment is maintained via the 3D structures. Any
voxel in such a dataset can access the information
about any other voxels, including those outside the
viewing frustum or obstructed by other voxels.
The secondary lighting is then computed. For any
voxel in the data structure, the light arrives from the
hemisphere of directions around the surface normal.
The approach in (Crassin et al., 2011) estimates this
volume with a number of cones. Each cone can be
thought of as a number of cubes stacked one after an-
other with increasing size. As each cube carries in-
formation (eg colour), the parameter at any point in
the cone volume can be approximated by linear in-
terpolation between the two nearest voxels. To ac-
cumulate the incoming light for each of the voxels,
the algorithm marches along each of the cones, sam-
pling the corresponding voxels in each one. As the
distance travelled along the direction increases, the
lower-resolution data structure is sampled. The sec-
ondary light is computed for all the voxels within the
structure, resulting in a single-bounce global illumi-
nation.
When all the light is filtered and the first bounce
is calculated, any final fragment at the end of the de-
ferred rendering pipeline can be located within the
data structure and assigned its own corresponding, al-
ready existing, voxel. Rather than directly assuming
the contents of that voxel, the fragment carries out an-
other round of voxel cone tracing, gathering informa-
tion from the previously computed output, acquiring
indirect illumination in a further bounce.
The voxel data is stored in a sparse octree struc-
ture, which resides on the GPU in a linear buffer, and
is updated when required. A highly compact version
of an octree is utilised, which uses one pointer per
node, pointing to a cluster of all children nodes. If the
octree is small enough then it benefits significantly
from GPU caching.
Some work has recently introduced a cascaded
volume to represent the voxelised environment
(McLaren and Yang, 2015). The work focuses on
computational overhead for viability on the Playsta-
tion4 console, using a set of 3D texture volume cas-
cades.
2.3 Sparse 3D Textures
With OpenGL 4.3 the concept of sparse textures was
introduced. The desire for increased resolution and
scale of readily available texture data has grown to the
point where the amount of available graphics memory
is the limiting factor. The default solution had previ-
ously been to page the texture memory (significantly
decreasing performance) (Weiler et al., 2000). The
introduction of sparse textures separated the address
space of the graphics processor from the physical
graphics memory, provisioning a partial virtualisation
of the texture memory mapping and non-contiguous
access to texture data.
Sparse texture access is also available for three di-
mensional textures. Efficiently creating sparse tex-
tures while preserving the fidelity of the source im-
age is an ongoing research topic (Peyr
´
e, 2009). Ap-
proaches typically entail the identification of affine
regions within the texture (Lazebnik et al., 2005)
and contour identification for image segregation (Gao
et al., 2013). As sparse texturing support is further
incorporated into the rendering hardware pipeline it
will become increasingly efficient and accessible to
the graphics programmer.
Interpolation between samples of sparse texture
data occurs in the hardware (as with bilinear and tri-
linear sampling of texture data for the fragment shader
stage) (Shreiner et al., 2013). This provisions a highly
efficient method for interpolating between sampled
values in the sparse texture, and removes the neces-
sity for the creation of bespoke software to achieve
the required interpolation from data saved in a less
hardware efficient manner.
3 IMPLEMENTATION
In this section the implementation details which are
specific to the adoption of 3D sparse textures for the
voxelisation of the scene are described. The broader
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time Global Illumination
203

global illumination approach of voxel cone tracing is
well-established (Crassin et al., 2011). The section
starts with a justification for the use of 3D textures in
this context, before detailing the implementation, and
describing some optimisations.
3.1 Applicability of Sparse 3D Textures
A sparse 3D texture was selected for the hierarchical
voxelisation of the scene, rather than the previously
used octree. Sparse texture maps reduce the memory
footprint of images with areas of unused space, so ap-
pear to be well suited to a hierarchical voxel structure.
The contents of a sparse texture are loaded in chunks,
only if they contain non-null data. If used to repre-
sent a voxelised space, chunks will only be uploaded
if they contain a non-uniform space.
While there is potential for a reduced memory
footprint, there is a caveat. Each chunk must be at
least 64kb in size (this constraint is likely to change
as hardware evolves). In the voxel environment this
means at least 26x26x26 blocks of volume sent each
time (for an 8-bit RGBA texture). Even if there is a
single stored entry and the rest of the voxels are null,
the entire chunk has to be sent to the GPU. Conse-
quently the viability of the approach will vary depend-
ing on the scene’s geometry.
An additional benefit of using 3D textures is the
availability of efficient hardware trilinear interpola-
tion. This technique calculates the value within a cube
volume, based on eight control values. To obtain the
final result, two values are obtained via the two bilin-
ear interpolations for the top and bottom plane, fol-
lowed by computing the value in between them, with
another linear interpolation. In the case of a dynam-
ically changing octree laid-out linearly in the GPU
memory, this would be hard to achieve, and would
require bespoke code rather than have hardware sup-
port. Furthermore, estimating the values between the
voxel volumes is achieved via quadrilinear interpola-
tion (a further linear interpolation based on the pair of
trilinear values fetched from each voxel).
As graphics hardware evolves, support for 3D tex-
tures is likely to increase, providing faster access to
the texture data, more efficient hardware interpola-
tion, scattered texture writing and larger high-speed
memory space. Conversely, the sparse octree ap-
proach is likely to continue to require bespoke code
tailored to the constraints of general GPU computing.
3.2 Voxelisation in Sparse 3D Textures
Scattered texture writing is a relatively recent addi-
tion to graphics SDKs (eg OpenGL 4.3 onwards).
The technique enables a fragment shader to write to
an arbitrary texel in a texture. Ordinarily, the use
of frame-buffers entails binding each fragment to a
target texel, with the correspondence of fragment to
texel pre-determined before the fragment shader is
run. Programmable texel access allows us to write
voxel details dynamically to the 3D texture map.
Without scattered texture writes the program
would have to select a single layer of the texture vol-
ume into which a fragment will be rasterized. In our
implementation layers are ordered along the z-axis,
hence if a triangle extends along the z-axis, many du-
plicates may be generated during the geometry shader
stage. A unique layer would then be selected for each
generated triangle. However there is a limit to how
many vertices can be generated from any incoming
primitive during the geometry shader stage. In addi-
tion, the more information that is associated to a ver-
tex and has to be carried into the fragment stage, the
less the number of new vertices that can be created.
The approach was worthwhile only with relatively
small triangle pieces that could extend to twenty lay-
ers in the worst case scenario (meaning an additional
60 vertices to be generated). Due to the varying lim-
itations of graphics cards, this technique would be
heavily hardware dependent. Therefore, we chose to
employ scattered texture writes, giving the ability of
writing into an arbitrary number of fragments within
the texture volume.
A triangle should be rasterized to the single plane
where its projection onto that plane results in the
greatest surface area. This requirement is met when
a triangle is projected onto the plane that is most per-
pendicular to the triangle’s normal. In order to avoid
dynamic branching, all three projection matrices were
constructed in advance, and a simple interpolation
technique was used to select the appropriate matrix
during the geometry shader stage.
It is essential to store fragment data to be used in
further lighting calculations, however 4-channel tex-
tures can only store four floating point numbers per
texel. Thus, it was necessary to work with multiple
images, which made it important to group some in-
formation and re-use it where possible. Simply ded-
icating a new texture for any data-type when desired
would consume a lot of memory, so numbers were
packed into a single float value as much as possi-
ble. Every voxel had to contain a normal, base ma-
terial colour (raw colour of the unlit surface) and
the transparency. During the voxelisation stage, each
voxel block had to determine the shading coming
from the light sources in the scene. The block’s cen-
tre was compared to the existing value in the shadow
map, determining whether it was in the shadow. This
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
204

was combined with the squared fall-off attenuation to
make voxels dimmer the further they were from the
light source, as well as its colour. This information
was stored to a third 3D-texture, referred to as Dif-
fuse.
3.3 Light Propagation
The voxel cone tracing (VCT) technique is now ad-
dressed with particular reference to how it is adapted
to use 3D textures. When several voxel cones are
combined, they can approximate a hemisphere, rep-
resenting all the light incoming from nearby objects.
This approach relies on increasingly averaging the
sampled content from the textures, the further a ray
gets from the starting position of a cone. Thus, it
was necessary to mipmap the 3D textures, combin-
ing the colours of nearby voxels into higher-level ver-
sions of the texture. Originally the default function-
ality provided by OpenGL (generateMipmaps()) was
used. However this turned out to be unproductive, as
the mipmaps were built on the client side, via CPU
and only then uploaded to the GPU. Each call to this
function stalled the program for three hundred mil-
liseconds, so a custom solution had to be devised.
The solution entailed the use of OpenGL compute
shaders to spawn a kernel per each yet-to-be-made
mip level of a texture. The compute shaders work
in parallel to build the entire mip-chain. The process
required sampling eight texels from a higher level, to
be interpolated and stored in the desired part of the
current mip level. The hardware provides this func-
tionality through linear filtering, so it was only nec-
essary to perform a single sample, in the middle of
the eight texels. The hardware performs interpolation
and the resulting value can be directly stored at the
needed position in the mipmap (the octree approach
of the reference solution can not take advantage of
this hardware interpolation).
As multiple layers of textures are generated in this
manner, it is possible to use VCT to achieve a first
bounce of global illumination. Because of the way
the cones are represented, their volume is estimated
by a series of successive cube-shaped texture sam-
ples. Each cube is sampled from a higher mipmap
level where the texel size corresponds to the size of
the current sample within that cone. It is possible to
estimate the size of such a cube (and therefore the
corresponding mipmap level) based on the distance
travelled from the cone’s origin and the tangent func-
tion. Figure 1 shows a voxelised cone across a range
of mip-map levels in the space.
Because the sample-size may not exactly corre-
spond to the dimensions of a mipmap’s texel, trilin-
Figure 1: A 45 degree cone within the voxel volume ex-
panding rightwards. Each colour change represents transi-
tion to a higher level mipmap. An X shape is centred in
each layer.
ear filtering was required. This removed occurrences
of hard transits along the mip-chain, interpolating be-
tween the two closest 3d-texture mip-levels. As the
hemisphere is represented by 7 cones of 45 degrees
each, a limit is needed on the number of steps each
cone can carry out before termination. Implementing
the texture volumes with 128 cubed resolution, a max-
imum of seven steps sufficed - each new cone samples
from a higher mipmap, of which there were seven in
total.
RGB and Alpha channels get averaged as the mip-
chain is computed. When Alpha represents trans-
parency it is possible to compute the accumulated
opacity sampled by the cone. Using this information,
it can be determined when a calculation of the incom-
ing light from a particular direction can be stopped,
meaning that enough opaque objects were encoun-
tered on the way and the search should be terminated.
When few wide cones are used to estimate the hemi-
sphere, the transparency might take longer to be gath-
ered, resulting in extra colours that may come from
the obstructed objects. Such a phenomenon is re-
ferred to as light leaking. Due to the increasing inter-
vals, this problem might still occur with narrow cones,
where a geometry voxel is simply missed by the sam-
ples, resulting in other surfaces located behind being
sampled. This can be mitigated to an extent by avoid-
ing using narrow geometry, and combining the illumi-
nation with the post-processing Screen-Space Ambi-
ent Occlusion (SSAO) effect. As hardware computing
power increases, shorter intervals can be employed,
rectifying the core of the issue.
Additionally, two thin planes located close to each
other might occupy two neighbouring voxels. During
the mipmapping process, their data will be averaged
into a lower-resolution variant of the textures, lead-
ing to a further cause of light leaking. To reduce this,
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time Global Illumination
205
anisotropic filtering should be used, where the con-
tents of the grid vary based on the viewing direction.
This however, requires more sampling of the textures
which would lead to increased processing times.
Figure 2: Single bounce illumination volume. This is used
as the input to the second light bounce calculation. The final
image is shown in Figure 5.
Assembly of the final image requires restoration
of each fragment’s world position and normal, using
the deferred pipeline results. That is followed by per-
forming cone tracing for each fragment, similar to
how it was done for the 3D textures. Because the
diffuse and first-bounce volumes are available, they
are used to gather single and double-bounce pixel-
lighting. This operation has to be performed uniquely
for each fragment, otherwise the image will contain
the voxel grid contents on the surfaces of objects.
3.3.1 Multiple Bounce Complexity
The voxel cone technique entails a linear increase
in computational cost as a higher number of light
bounces are introduced. This is in contrast to other
ray-casting techniques which see an exponential rise
(as each ray generates multiple further ray casts from
each bounce). To achieve a double bounce, the dif-
fuse information is mipmapped and used for the first-
bounce, as shown in Figure 2. This first bounce light-
ing information is then again mipmapped and used to
calculate the second bounce in the same manner, and
so on.
Memory cost also increases linearly, as the addi-
tional requirement is simply a new mipmapped tex-
ture, constituting another stage of light transfer. How-
ever since we are dealing with a three-dimensional
volume of texels, any increase in resolution (or space
size) must obey the “power of two” rule (each tex-
ture size must be a power of two in all dimensions).
This implies that each further growth in resolution
will consume eight times the previous data-structure
memory. Additionally,memory must be allocated for
the mipmapping chain, that is an extra thirty-three
percent of the memory for the chained textures.
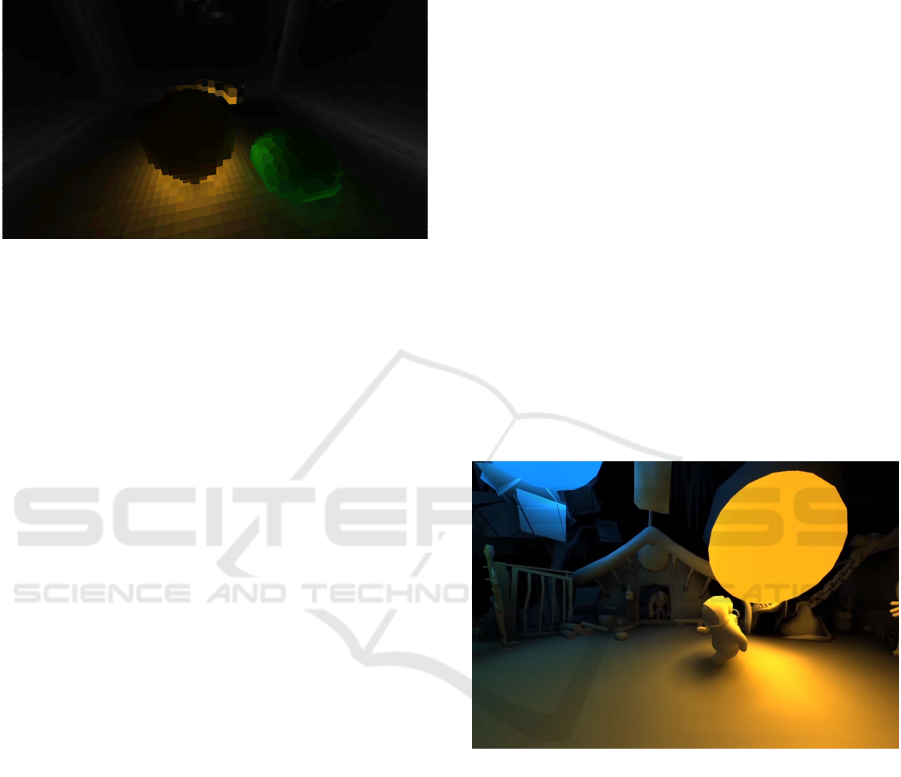
3.4 Emissive Surfaces
Emissive entities were also added to our solution (Fig-
ure 3). Each object, as well as a base RGB colour, and
Alpha for transparency, is able to glow, discarding any
effect from the nearby light sources (such as lambert,
attenuation or shadowing) due to being luminous on
its own. The amount of glow and adherence to the ex-
ternal shadowing was controlled by a brightness pa-
rameter. The diffuse lighting values of an emissive
surface could be modulated linearly, from 100% to
0% for brightness values below 0.5. For higher val-
ues, the entity is made unresponsive to illumination
effects and only emits its pure, base colour onto the
surrounding objects. Higher values simply meaning
the object emits a stronger colour.
Some adaptations were made to implement the
self-illumination technique. During the construction
of the diffuse texture any shadowing has to be re-
duced, depending on the brightness parameter of the
triangle primitive being voxelised. The final value in
the diffuse output will then contain the diffuse colour,
as well as the base-colour of the voxelised surfaces if
the triangle is emissive.
Figure 3: Emissive orange and blue spheres illuminate the
white-surface character producing soft shadows.
Clearly, it is important to retain the brightness in a
texture that will be mipmapped, as it is an important
coefficient during all the cone-tracing stages. The fi-
nal step of transmitting the glow onto the nearby ob-
jects is to carry out the standard first-bounce gath-
ering, which picks up emissiveness by default. The
emissive illumination affects the surroundings due
to the brightness coefficient sampled by the cones,
unlike when sampling standard, non-glowing neigh-
bouring voxels. As the viewpoint moves towards
the emissive surface, the resulting illumination pro-
duces soft, life-like shadows with umbra and penum-
bra, their quality depends on the resolution of the data
structure.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
206

3.4.1 Voxel Cone Orientation
During the voxel cone tracing, an array of cone direc-
tions had to be re-oriented via multiplication of the
Tangent-Binormal-Normal (TBN) matrix for a given
fragment shader invocation. As a result, the entire
bouquet of such vectors was modified to face in the
direction of the voxel normal. Because the matrix
had to be constructed at runtime from the normal, it
was not possible to supply it as a pre-computed uni-
form value. Similarly, the array of cone directions
had to be multiplied by the matrix, thereby consum-
ing some processing power. The situation was im-
proved by ensuring the array is supplied with vec-
tors of pre-normalized directions, although this en-
hancement was minor. A bouquet of seven cones was
used, each one being forty-five degrees wide, yielding
a relatively-homogeneous hemisphere representation
(Figure 4).
Figure 4: The bouquet of seven 45
◦
voxel cones used in the
tracing algorithm.
It was also necessary to spin the entire bouquet
around the voxel normal after it was aligned in that di-
rection. Without this improvement, cones dispatched
from the voxels of walls and the floor could light up in
mild, yet visible, ellipsoidal patterns that grew larger
as the spherical emissive objects approached those
surfaces. Spinning the bouquet eliminated the pres-
ence of inevitable gaps between cone volumes and
yielded more plausible visual results (as also reported
in the reference solution (Crassin et al., 2011).
4 RESULTS AND EVALUATION
Implementation of voxel cone tracing using sparse 3D
textures to simulate double-bounce indirect lighting
resulted in a 1920x1080 resolution image locked at 60
frames per second on a GTX980 graphics card. The
data structure contained 128
3
texels. Two mipmapped
Figure 5: Final image with diffuse and double bounce indi-
rect illumination.
textures were used along with the base-colour and
normals texture (which did not require a mip-chain).
The interpolation scheme employed in the generation
of reflective shadow maps (Dachsbacher and Stam-
minger, 2005) was used to reduce the number of com-
puted pixels and achieve high-quality frame rates, up-
scaling one third of the original resolution to the full
screen and yielding an additional 8 frames improve-
ment. An image from the resulting render is shown in
Figure 5.
The relative computational expense of each step
in the process is presented in Figure 6. The final per-
fragment cone-tracing step remains the most compu-
tationally expensive. The computational efficiency af-
forded by the direct hardware access to the 3D sparse
texture data, and the interpolation step between sam-
pled voxel values, is evident in the relatively low com-
putation costs of the voxelisation and light propaga-
tion steps. These results compare favourably with
those presented in the reference work (Crassin et al.,
2011) where a lower frame-rate is achieved for a
1024x768 image using the sparse octree approach.
Figure 6: Relative computational expense of the four stages
of voxel cone tracing technique for two-bounce indirect il-
lumination using sparse 3D textures.
Table 1 shows the computational timing for
achieving double bounce indirect illumination using
sparse 3D textures on our test environment at three
different screen resolutions (1920x1080, 1600x900
and 1024x768). In each case timings are averaged
across 1000 iterations of rendering the scene. Com-
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time Global Illumination
207
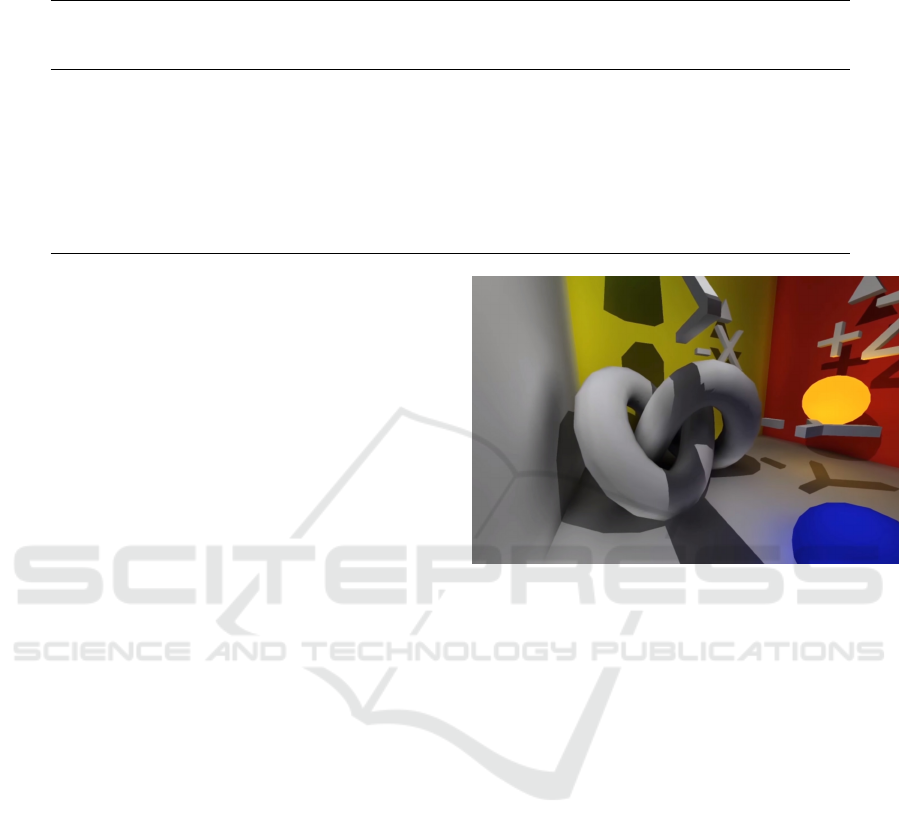
Table 1: Computation timings (in milliseconds) for stages of double bounce voxel cone tracing using sparse textures at
different screen resolutions. All timings averaged over 1000 iterations.
Screen resolution 1920x1080 1600x900 1024x768
ms %age ms %age ms %age
Voxelisation 0.74163 4.02 0.6672 4.24 0.656725 5.23
Generate mipmap 1 1.383379 7.5 1.312604 8.35 1.281829 10.2
First bounce (voxel space) 5.590338 30.31 5.596479 35.59 5.577985 44.4
Generate mipmap 2 1.194863 6.48 1.184982 7.54 1.168038 9.3
Second bounce (screen space) 9.531563 51.68 6.963091 44.28 3.878667 30.87
Total 18.441773 15.724356 12.563244
paring the required computation time for the first
bounce (in voxel space) and the second bounce (in
screen space) shows that, as expected, the most sig-
nificant cost of increasing the screen resolution is on
calculation of the second bounce, as the calculation
takes place in screen space.
The two mipmapping steps, and the voxelisation
of the scene, are not the most computationally expen-
sive aspects of the process. Further optimisations in
these steps would therefore have less of an effect. The
mipmapping stages in particular could be further op-
timised through the use of automated mipmap gener-
ation extensions such as OpenGL’s SGIS.
Some further savings in computation time can be
considered, although they have a trade-off in poten-
tial degradation of image fidelity. Partial computa-
tion of the update of the mipmap textures (a fraction
of texture volume per frame) can speed up perfor-
mance significantly when coupled with the interpo-
lations discussed previously. This optimisation how-
ever must be approached with caution, as deferred re-
computation can result in voxels lagging behind their
respective fragments, an effect which will become
more pronounced with increasingly dynamic scene el-
ements. The adoption of an axis-aligned bounding
box (AABB) for voxelisation, would result in an up-
date only occurring for the texels captured by the box.
Similarly, lighting computations can be carried out
partially, for a portion of the illuminated 3D textures.
5 CONCLUSIONS
Voxel Cone Tracing has been successfully employed
for indirect illumination in real-time rendering of
scenes, as the technique allows for the calculation of
multiple light bounces with only a linear additional
cost in computation. To date, the voxelised scene has
been stored in the form of a sparse octree, taking ad-
vantage of GPU caching for high speed access to the
Figure 7: Image from final render with double bounce indi-
rect lighting combined with shadow-mapping.
scene’s spatial information. An alternative structure
for storing the 3D scene information to be used in the
calculation of indirect illumination is the 3D texture,
as it provides the required hierarchical data structure
(through mip-mapping) and can be stored in a hierar-
chically sparse manner (through sparse texturing).
In this paper we have presented an implementa-
tion of voxel cone tracing for global illumination util-
ising sparse 3D textures for the storage of the 3D spa-
tial information of the rendered scene. The perfor-
mance and fidelity of our implementation has been
shown to be of comparable quality to the reference
solution. Utilising 3D textures allows us to take ad-
vantage of hardware interpolation when sampling the
mip-mapped textures which represent the voxelised
scene. This provides very efficient bilinear and tri-
linear interpolation, with little software overhead, so
that the estimation of lighting parameters between the
voxelised points is highly efficient.
As GPU and graphics card technology evolves,
the integration of 3D texture access into the hardware
is likely to increase. This will make the adoption of
3D textures in the context of voxel representation of
a scene for lighting an increasingly attractive propo-
sition, as both access times and high-speed memory
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
208

devoted to 3D textures are likely to significantly im-
prove with the hardware.
REFERENCES
Crassin, C., Neyret, F., Sainz, M., Green, S., and Eise-
mann, E. (2011). Interactive indirect illumination us-
ing voxel cone tracing. In Computer Graphics Forum,
volume 30, pages 1921–1930. Wiley Online Library.
Dachsbacher, C., K
ˇ
riv
´
anek, J., Ha
ˇ
san, M., Arbree, A., Wal-
ter, B., and Nov
´
ak, J. (2014). Scalable realistic render-
ing with many-light methods. In Computer Graphics
Forum, volume 33, pages 88–104. Wiley Online Li-
brary.
Dachsbacher, C. and Stamminger, M. (2005). Reflective
shadow maps. In Proceedings of the 2005 symposium
on Interactive 3D graphics and games, pages 203–
231. ACM.
Gao, Y., Bouix, S., Shenton, M., and Tannenbaum, A.
(2013). Sparse texture active contour. IEEE Trans-
actions on Image Processing, 22(10):3866–3878.
Goulding, D., Smith, R., Clark, L., Ushaw, G., and Mor-
gan, G. (2012). Real-time ambient occlusion on the
playstation3. In GRAPP/IVAPP, pages 295–298.
Hachisuka, T. (2005). High-quality global illumination ren-
dering using rasterization. GPU gems, 2:615–633.
Jendersie, J., Kuri, D., and Grosch, T. (2016). Precomputed
illuminance composition for real-time global illumi-
nation. In Proceedings of the 20th ACM SIGGRAPH
Symposium on Interactive 3D Graphics and Games,
pages 129–137. ACM.
Jensen, H. W. (2001). Realistic image synthesis using pho-
ton mapping, volume 364. Ak Peters Natick.
Kajiya, J. T. (1986). The rendering equation. In ACM
Siggraph Computer Graphics, volume 20, pages 143–
150. ACM.
Kaplanyan, A. and Dachsbacher, C. (2010). Cascaded light
propagation volumes for real-time indirect illumina-
tion. In Proceedings of the 2010 ACM SIGGRAPH
symposium on Interactive 3D Graphics and Games,
pages 99–107. ACM.
Laine, S. and Karras, T. (2011). Efficient sparse voxel oc-
trees. IEEE Transactions on Visualization and Com-
puter Graphics, 17(8):1048–1059.
Lazebnik, S., Schmid, C., and Ponce, J. (2005). A sparse
texture representation using local affine regions. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 27(8):1265–1278.
McLaren, J. and Yang, T. (2015). The tomorrow children:
lighting and mining with voxels. In ACM SIGGRAPH
2015 Talks, page 67. ACM.
Mittring, M. (2012). The technology behind the unreal en-
gine 4 elemental demo. part of “Advances in Real-
Time Rendering in 3D Graphics and Games,” SIG-
GRAPH.
Nichols, G., Shopf, J., and Wyman, C. (2009). Hierarchical
image-space radiosity for interactive global illumina-
tion. In Computer Graphics Forum, volume 28, pages
1141–1149. Wiley Online Library.
Peyr
´
e, G. (2009). Sparse modeling of textures. Journal of
Mathematical Imaging and Vision, 34(1):17–31.
Ritschel, T., Dachsbacher, C., Grosch, T., and Kautz, J.
(2012). The state of the art in interactive global illu-
mination. In Computer Graphics Forum, volume 31,
pages 160–188. Wiley Online Library.
Shreiner, D., Sellers, G., Kessenich, J. M., and Licea-Kane,
B. (2013). OpenGL programming guide: The Offi-
cial guide to learning OpenGL, version 4.3. Addison-
Wesley.
Sund
´
en, E. and Ropinski, T. (2015). Efficient volume illu-
mination with multiple light sources through selective
light updates. In 2015 IEEE Pacific Visualization Sym-
posium (PacificVis), pages 231–238. IEEE.
Weiler, M., Westermann, R., Hansen, C., Zimmermann, K.,
and Ertl, T. (2000). Level-of-detail volume rendering
via 3d textures. In Proceedings of the 2000 IEEE sym-
posium on Volume visualization, pages 7–13. ACM.
Adoption of Sparse 3D Textures for Voxel Cone Tracing in Real Time Global Illumination
209
