
Context-aware Patch-based Method for Fac¸ade Inpainting
Benedikt Kottler
1
, Dimitri Bulatov
1
and Zhang Xingzi
2
1
Department of Scene Analysis, Fraunhofer Institute of Optronics,
System Technologies and Image Exploitation (IOSB), 76275 Ettlingen, Germany
2
Fraunhofer Singapore, Singapore
Keywords:
City Modeling, Inpainting, Patch-based Inpainting, Textures, Texture Image, Fac¸ade Elements.
Abstract:
Realistic representations of 3D urban scenes is an important aspect of scene understanding and has many
applications. Given untextured polyhedral Level-of-Detail 2 (LoD2) models of building and imaging con-
taining fac¸ade textures, occlusions caused by foreground objects are an essential disturbing factor of fac¸ade
textures. We developed a modification of a well-known patch-based inpainting method and used the knowl-
edge about fac¸ade details in order to improve the fac¸ade inpainting of occlusions. Our modification focuses
on suppression of undesired, superfluous repetitions of textures. To achieve this, a coarse inpainting result
by a structural-based method is used to influence the choice of the best patch so that homogeneous regions
are preferred. The coarse inpainting is calculated using the context knowledge and average color instead of
traditionally applied arbitrary structural inpainting. Our modification furthermore introduces a parameter that
allows to weight the influence of the coarse inpainting. A parameter study shows that this parameter can be
chosen intuitively and does not require any parameter choice method. The cleaned fac¸ade textures could be
successfully integrated into the accordingly adjusted building models thus upgrading them to LoD3.
1 INTRODUCTION
Realistic representations of 3D urban scenes, in par-
ticular, buildings walls from openly available images
is an important aspect of scene understanding and has
many applications in rapid response missions (Bula-
tov et al., 2014a; Bulatov et al., 2014b) and virtual
tourism (Shalunts et al., 2011), because buildings are
becoming easier to identify. For other applications,
such as computation of energy balance and, more
in general, simulation of buildings in spectral ranges
other than visual (Guo et al., 2018), it is important
to know the materials of fac¸ade parts and not only
textural compound. The ability to open, close and
breach windows may be useful in applications con-
nected with virtual reality (Bulatov et al., 2014b).
Summarizing, plausible decomposition of fac¸ade
models into classes e.g. door, window, background
using only a minimum of information, namely, tex-
ture images from data-bases are meaningful require-
ments. Such images are available through Internet-
based services (Google Maps, Bing Maps, and oth-
ers) providing public access to geographic informa-
tion system (GIS) data as well. Hence, there are many
related works (Vanegas et al., 2010; Zhang et al.,
2019) striving for adding automatically the 3D geom-
etry of the observed buildings to the building mod-
els. In particular, in the simple and robust approach
of (Zhang et al., 2019), dedicated to extending tex-
tured LoD2 models to LoD3 models, images were
rectified, the fac¸ade elements like doors and windows
detected, and the 3D model updated. However, in the
Berlin CityGML dataset employed for this work, the
quality of the texture images was rather poor. Com-
mon problems in low-quality texture images, such
as lens distortions, overexposure/underexposure, illu-
mination inconsistencies, shadows/occlusions, reflec-
tion/refraction, etc., can cause a significant reduction
in the rendering quality of a 3D city scene. Further-
more, since the texture images of building facades
were the only input of the procedure of (Zhang et al.,
2019), proper occlusion analysis could not be car-
ried out. This had a disadvantage that the fac¸ade
images were often contaminated, among others and
in particular, by trees standing in front of the build-
ings. Especially when it comes to simulation of win-
ter scenes, unpleasant and unrealistic green stains at
building walls as in Figure 1 are clearly visible.
In order to prevent this from happening, we wish
to extend the approach of (Zhang et al., 2019) into
the direction of cleaning building walls from textures
of trees using inpainting methods. The texture-based
210
Kottler, B., Bulatov, D. and Xingzi, Z.
Context-aware Patch-based Method for Façade Inpainting.
DOI: 10.5220/0008874802100218
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
210-218
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
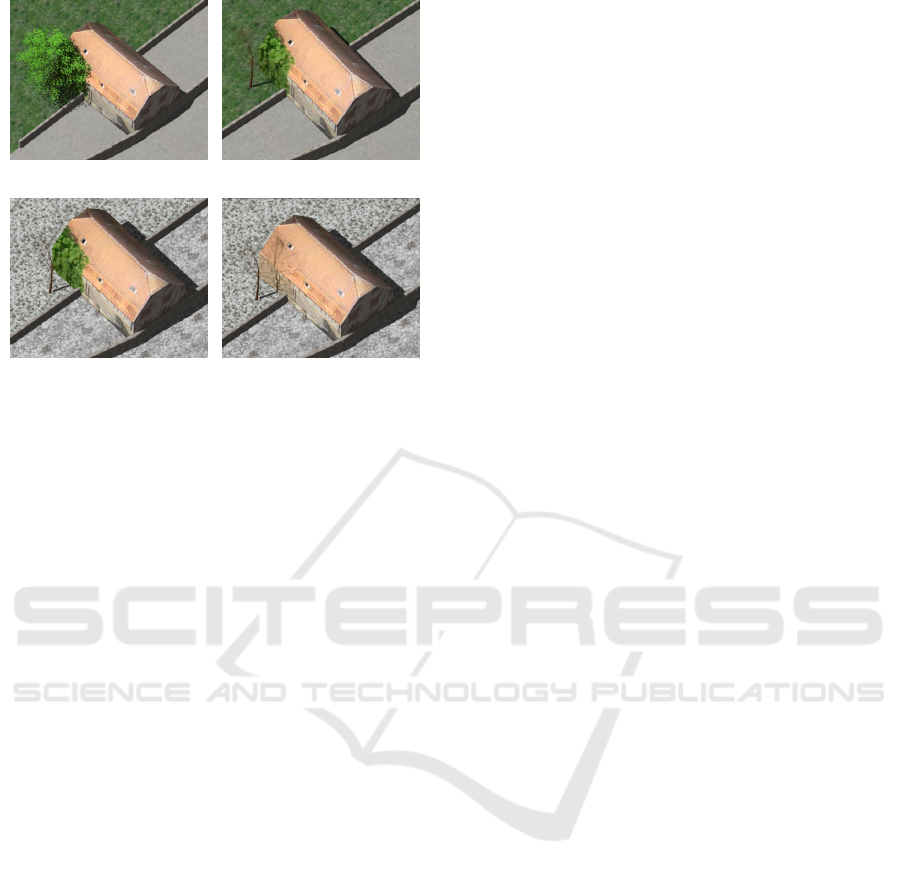
(a)
(b)
(c)
(d)
Figure 1: In summer captured textures need adaptation for
winter environments. (a) Summer scene with modeled tree,
(b) Summer scene without modeled tree, (c) Winter scene
with distracting texture, (d) Winter scene with cleaned tex-
ture.
inpainting is identified as a state-of-the-art tool to fill
large holes in the images. Our main contribution is
that the context, retrieved at the stage of fac¸ade detec-
tion of (Zhang et al., 2019), is extensively taken into
account. Note that we assume here that the masks for
trees and possibly other foreground objects are given
because otherwise they can be extracted using deep
learning techniques for semantic segmentation, such
as (Chen et al., 2018).
2 PREVIOUS APPROACHES
This section will consist of two parts, dedicated re-
spectively to particularly representative approaches
for creation of LoD3 models, or, more specifically,
detection of fac¸ade elements, and those for image in-
painting.
2.1 Creation of LoD3 Models
We start our selection of representative methods on
fac¸ade analysis by the method of (Xiao et al., 2008),
who use actual sensor data given as image sequences
from ground-based vehicles. A fac¸ade is recursively
decomposed into a set of rectangular patches based on
the horizontal and vertical lines detected in the tex-
ture image. The next step is constituted by a bottom-
up merging of patches, whereby the authors make
use of the architectural bilateral symmetry and repet-
itive patterns automatically detected. Finally, a ver-
tical plane with independent depth offset is assigned
to each patch, however, without assigning a seman-
tic label. The authors of (Loch-Dehbi and Pl
¨
umer,
2015) rely on a statistical approach. They automat-
ically generate a small number of most likely hy-
potheses and provide the corresponding probabili-
ties. The model parameters can be retrieved from
Gaussian mixture distributions, whereby constraints
between these parameters are simultaneously taken
into account. Probably, the main risk of this method
could ending up in the combinatoric chaos. An in-
teresting approach is presented by (Guo et al., 2018).
The fac¸ade is subdivided into facets. To determine
whether a facet contains a window, R-CNNs (Ren
et al., 2015) are employed. Even though this ap-
proach is not evaluated, the application field is in-
teresting: Representation of the digital twin in ther-
mal infrared spectrum. Yet another approach (Wen-
zel and F
¨
orstner, 2016) contains an optimization pro-
cedure incorporated into monte-carlo-like simulation
with multiple births and deaths of objects (doors, win-
dows, and balconies). The regularization prior is
given by symmetry constraints of fac¸ade objects and
the data term is constituted by descriptors allowing
detecting corners and other salient structures in im-
ages. Despite impressive results, monto-carlo simula-
tion and optimization by a procedure reminding sim-
ulated annealing is costly. To prove how the proposed
context-aware inpainting works in challenging situa-
tions, we decided to assess a method of (Zhang et al.,
2019), which provides good results without too many
complex computations. In Section 3, we will provide
a short overview of this work.
2.2 Image Inpainting Techniques
Concerning inpainting techniques, which represents
the focus of this paper, most of them can be denoted
as either structure-based or texture-based. To the
first subgroup, we assign the methods based on krig-
ing (Rossi et al., 1994), marching method of (Telea,
2004), or on finding a stationary solution of a par-
tial differential equation. The variational compo-
nent is added to enforce a model assumption, such
as piecewise smoothness. Thus, the relevant meth-
ods (Bertalmio et al., 2001; Sch
¨
onlieb and Bertozzi,
2011) are usually employed to tackle simultaneous
the denoising and inpainting task. The structure-
based methods have been intensively studied during
many years because of their inter-disciplinary appli-
cability. However, it has been established that they
neither perform well in case of richly textured back-
ground nor for too large holes, since this provokes
as a consequence unnatural blurring of the inpaint-
ing domain. Therefore, starting at epochal publica-
Context-aware Patch-based Method for Façade Inpainting
211

tions of (Efros and Leung, 1999; Criminisi et al.,
2004), texture-based methods have become increas-
ingly popular in the recent years. The basic idea is
to search for every pixel to be inpainted a window,
which partly appeared somewhere else and there con-
text is filled. Countless modifications have been im-
plemented since then, including manipulations of pri-
ority terms for pixels to be inpainted, e.g. (Le Meur
et al., 2011), convex combinations of patches in or-
der to suppress noise and artifacts between pasted
patches, and narrowing search spaces (Buyssens et al.,
2015). The crucial leverage, is hidden in this ‘’some-
where else”. In remote sensing, the didactically
excellent paper of (Shen et al., 2015), differentiate
between spatial, spectral, and temporal techniques.
They search for the missing information in other parts
of the same image, in another channel, or, respec-
tively, even in some completely different images. This
last group obviously opens the door to CNN-based
method which now are being increasingly employed
for inpainting tasks as well. From the pioneering
work of (Yeh et al., 2017), who were able to com-
plete images with only a very sparse number of pixels
covered using deep learning, only a few years have
passed until the NVidia solution (Liu et al., 2018) be-
came available online.
Typical for most solutions based on deep learning
is that the context information is sacrificed in favor
of millions of training examples. The authors, how-
ever, decided to make use of context and to process
not only the raw images from (Zhang et al., 2019),
but also the classification results of fac¸ade elements.
In case of structure-based inpainting, (Kottler et al.,
2016) demonstrated that even a simple method allows
to preserve sharp edges between classes, once context
information is taken into account. This paper will de-
scribe a suitable modification of the approach of (Cri-
minisi et al., 2004).
3 PRELIMINARIES
In this section, we will first briefly describe the pro-
cedure of (Zhang et al., 2019), in which applying in-
painting techniques are required. In the second sub-
section, we introduce the original method of Criminisi
et al. In the third subsection, a CNN-based inpainting
as a state-of-the-art tool will be outlined for compari-
son.
3.1 Texture Analysis and Creating
LoD3 Models of Zhang et al.
In what follows, we describe the approach of (Zhang
et al., 2019) which starts at LoD2 CityGML and tex-
ture images and aims at obtaining 3D models of the
fac¸ade, which are enriched with semantics about im-
portant fac¸ade elements like doors and windows. This
is a data-driven approach which allows to generate
plausible LoD3 models from textured LoD2 models.
This method starts by the rectification of a texture im-
age to make the facade elements axis-parallel. Then,
automatic detection of doors and windows in the tex-
ture images is based on the Mask R-CNN method
within ResNet. There are two successive phases in
Mask R-CNN. A Region Proposal Network proposes
candidate object bounding boxes and an Object De-
tection Network and a Mask Segmentation Network
predict the class and box offset. Thus, the second
phase has the output of the first one phase as in-
put and the combined loss function takes both losses
into account. After the detection, rule-based cluster-
ing is applied to align the detected fac¸ade elements
and regularize their sizes. The features for clustering
are the coordinates of object centroids. The sizes of
the fac¸ade elements are taken into account as well.
For example, if the size of a fac¸ade element differs
from other fac¸ade elements, it is marked as outlier and
would not be regularized. After interactively select-
ing matched models from a 3D facade element model
database, deforming and stitching them with the input
LoD2 model takes place, as Figure 2a shows.
In this way, building models can be extended
from LoD2 to LoD3 based on its texture images.
However, the texture images of the LoD2 CityGML
models are usually aerial images taken from top or
side views. As shown in Figures 2a and 2b, their
quality is sometimes very poor. Common problems
in low-quality texture images include distortions,
overexposure/underexposure, illumination inconsis-
tencies, shadows/occlusions, reflection/refraction, re-
dundancy and etc. These problems can cause a sig-
nificant reduction in the rendering quality of a 3D
city scene. The present work aims at overpainting the
foreground objects, like trees, from the images before
adding them to the model.
3.2 Texture-based Inpainting of
Criminisi et al.
In this section, we briefly describe the algorithm of
(Criminisi et al., 2004) and introduce the relevant
modifications later.
Given is an image with image region I , region to
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
212

(a)
(b)
Figure 2: (a) Pipeline of the approach of (Zhang et al.,
2019), (b)s examples of extending LoD2 model to LoD3.
As we can see, the texture images in both (a) and (b) are
negatively affected by foreground objects (trees).
be filled D ⊂ I and a source region S ⊂ I −D. Straight
forward, S may be defined as the entire image minus
the target region (S = I − D), or it may be manually
specified by the user. The inpainting evolves inward
as the algorithm progresses, and so we also denote to
∂D as the fill front. Moreover, as with all exemplar-
based texture synthesis (Efros and Leung, 1999), the
size of the template window S must be specified. The
authors of (Criminisi et al., 2004) suggest a 9×9 win-
dow as default.
Each pixel maintains a confidence value C(p),
which reflects reliability of the pixel information, and
which is frozen once a pixel has been filled. Dur-
ing the algorithm, patches along the fill front are also
given a temporary priority value, which determines
the order in which they are filled.
The algorithm fills the pixels around the filling
front one after the other in order of prioritization by
copying image content from the best patch. The patch
of th
´
e current pixel of the filling front is compared
with all patches in the source area S. Using a cost
function evaluated on the pixels outside the inpaint-
ing area, the patch yielding the minimum distance is
then copied to the target area. The core of the algo-
rithm is an isophote-driven prioritization process that
combines structure and texture inpainting.
The method of (Criminisi et al., 2004) has the
restriction that, applied on images with complicated
contents and repetitive structures may be copied into
the inpainting area. Our proposed method is supposed
to smooth the result and how to use context knowl-
edge to restore the known objects.
3.3 Inpainting using Partial
Convolution Neuronal Network of
Liu et al.
Deep learning methods are currently very popular and
are successfully employed in many areas of computer
vision. Therefore, we use an inpainting method (Liu
et al., 2018) as a comparison to our proposed method.
This deep neural network has a U-Net-like structure
with deconvolutions based on nearest-neighbor prin-
ciple. The inpainting problematic is reflected by re-
placing all convolution layers by the so-called par-
tial convolution layers, that is, only pixels within the
inpainting mask are affected by convolutions. We
used the implementation available on Github
1
which
included a pre-trained model with images of size
256 × 256, trained for about 1 day on a small part
of ImageNet. For comparison, the original paper has
image sizes 512 × 512 and ten days training for Ima-
geNet and Places2 and three days for CelebA-HQ. In-
put images are resized on the shorter side to 256 pixels
with maintaining the original aspect ratio. The selec-
tion of a square with 256 × 256 took place, whereby
cropping is performed the way the door is preserved
in order not to lose important fac¸ade details.
4 METHOD
4.1 Inpainting with Classes
The two critical parts of the algorithm (Criminisi
et al., 2004) are determining the priorities, which
should be made as smart as possible, and the find-
ing of the best copy patch, which should be done as
efficiently as possible.
The aforementioned prioritization prefers pixels
which (i) are a continuation of edges and (ii) are sur-
rounded by many pixels containing information. We
search for the maximum of the priority term which is
given as a product
Pr(p) = Co(p)Da(p), (1)
where
Co(p) =
∑
q∈N
p
∩(I −D)
Co(q)
|N
p
|
, Da(p) =
∇I
⊥
p
· n
p
β
and |N
p
| denotes the number of neighboring pixels.
Initially, all pixels in the inpainting area bear no in-
formation content, so C o(p) = 0 for all p ∈ D and all
1
https://github.com/ja3067/
pytorch-inpainting-partial-conv
Context-aware Patch-based Method for Façade Inpainting
213

pixels outside have the value 1, so Co(p) = 1 for all
p ∈ (I − D). In the following, pixels are preferred
which have as many already filled neighbors as possi-
ble, whereas pixels, which were filled earlier, are pre-
ferred. The data term Da(p) describes the strength of
isophotes hitting the front of D. As filling proceeds,
this term boosts the priority of edges entering the in-
painting domain and gives the algorithm its structural
inpainting component.
After the prioritization step, the pixel q with the
best copy patch is determined for the patch of the
pixel p with the highest priority. The aim is to find
the patch which is closest to the given patch. The dis-
tances between the target patch and the patches of the
pixels in the source region are calculated and a mini-
mum argument is determined, so
q
∗
= arg min
q∈S
d(p,q),
where the distance measure is denoted with d : I ×
I → R.
It is defined as follows:
d(q, p) =
∑
x
q
∈N
q
{[ψ(x
q
) − I(y
p
(x
q
)] · M(x
q
)}
2
where in the general case
ψ(x) =
I(x) if x /∈ D
˜
I(x) if x ∈ D
(2)
or in the case with classes
ψ(x) =
I(x) if x /∈ D
Col(i) if x ∈ {y ∈ D|C (y) = i}
, (3)
where Col(i) denotes the average color of class i, and
M(x) =
1 if x /∈ D
α else
(4)
denotes the function ψ corresponds to the source im-
age I outside of the inpainting domain. Inside this
domain, it corresponds to an approximation of the
image content
˜
I. To preserve structural changes of
color information,
˜
I can be a structural inpainting re-
sult. Since elements of different classes are present,
we decided to break the procedure down to the level
of classes. Thus, an approximation is calculated with
the classification by setting the color value of a pixel
to the average color of the corresponding class (see
section 5.2). This approximation is based on addi-
tional information, for example the result of structure
inpainting, or on a classification result. The parameter
α ∈ [0,1] in M describes the weighting of the approx-
imation introduced in
˜
I. It can set intuitively as shown
in section 5.1.
The algorithm can be seen as a function I
Inp
=
Cr(I ,D,S [,C]), where the classification result is op-
tional and only used to calculate the approximation.
4.2 Fac¸ade Reconstruction
The first input in this section is a rectified fac¸ade tex-
ture image I in which the foreground objectes are de-
tected. After morphological dilation we obtain the
inpainting area D. The second, optional input is the
classification result C of the fac¸ade images described
in Section 3.1. One can obtain a mask for a given
class i by
C
i
(p) =
1 if C (p) = i /∈ D
0 otherwise
For the concrete problem, pixels belonging to fac¸ade
background and foreground object should be in-
painted using only regions of visible fac¸ade back-
ground, and pixels belonging to fac¸ade details should
be inpainted using only corresponding pixels of the
according class. We denote this set of ”valid pixels”
by the source region S = D
c
∩C
f. b.
and will apply our
method to the problem.
For the fac¸ade images, the algorithm was executed
twice. The first time, it is used to reconstruct the
fac¸ade background while the second time it is used
to add the fac¸ade details to the first result. This leads
to a two-step process for fac¸ade reconstruction.
Fac¸ade Background. For the fac¸ade background,
the inpainting area is restricted to the area belong-
ing to the fac¸ade background class. Accordingly, the
source area is restricted to the visible area, which be-
longs to the class fac¸ade background. This results in
the rule:
I
InpBack
= Cr(I ,D ∩C = f. b.,S = D
c
∩ C
f. b.
,C)
Fac¸ade Details. After that, the fac¸ade details can be
added. The painting area is restricted to the area be-
longing to the fac¸ade background class. Accordingly,
the source area is also restricted to the visible area that
belongs to the class fac¸ade details. This results in the
analogical rule:
I
InpFac¸ade
= Cr(I ,D ∩C = f. d.,S = D
c
∩ C
f. b.
,C).
Summarizing, in the first step, the facade back-
ground was reconstructed. In the second step we add
the fac¸ade details by repeating the first step, but using
only the locations of covered windows as the inpaint-
ing area and the areas where doors and windows as
source areas lied.
5 RESULTS AND DISCUSSION
In this section, we will first make a parameter study
for α in equation (4) and will show that its consid-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
214

eration allows preventing unwanted repetition of pat-
terns while its choice is quite straightforward and in-
tuitive. Then, we present the results of the modified
method of (Criminisi et al., 2004) applied on a data
set already analyzed by (Zhang et al., 2019). We con-
sidered rectified fac¸ade texture images, which were
part of a LoD3 city model of Berlin and correspond-
ing classification results for windows and doors. For
those images, where a foreground object – a tree, for
example – was occluded the fac¸ade. We selected a
binary mask accordingly. Otherwise, a polygon of
interest was selected that may best show the differ-
ences in performance of all algorithms. Following,
a detailed comparison of the results of the proposed
method with those produced using the deep learning
technique will take place. The section is concluded
by a description on a LoD3 model creation.
5.1 Choice of α
In this subsection, we make a visual evaluation of the
influence of the parameter α in equation (4) on the in-
painting result. For the complex wall texture in the
example image, we created a coarse approximation of
the structure using Navier-Stokes inpainting, shown
in Fig 3a. Then, we run our method and varied α be-
tween 0 and 1. In Figure 3, the result for different α
is shown. It becomes clear that for α values close but
not equal to 0, the dominant colors in the inpaining
domain are similar to those around it and that the un-
desired repetitions of patterns are much more rarely
present. The advantage of our method is that texture
content is searched for in the regions with similar col-
ors. The blurring is typical for structural inpainting
and thus, small values of α, but it disappears gradu-
ally with its growing value.
5.2 Fac¸ade Reconstruction
The results of the fac¸ade inpainting are shown by ten
characteristic examples of fac¸ade images and classifi-
cation results due to (Zhang et al., 2019) in Figure 4.
The classes for doors and windows are represented by
blue and red colors, respectively. The patch size for
the proposed texture-based method was 21 × 21 pix-
els and α = 0.98 for all images. As inpainting area,
we used the detected foreground object enlarged by
applying a morphological dilation.
We believe that in the majority of cases the in-
painted – either using the proposed or CNN-based
method – images (in the two right columns) have
a more realistic appearance than the corresponding
original images on the left. We can see that the struc-
tural inpainting can preserve the dominant colors of
(a) Structure (b) α = 0 (c) α = 0.2
(d) α = 0.4 (e) α = 0.6 (f) α = 0.8
(g) α = 0.9 (h) α = 0.92 (i) α = 0.94
(j) α = 0.96
(k) α = 0.98 (l) α = 1
Figure 3: Influence of parameter α. The choice α = 1 cor-
responds to the original method.
the fac¸ade and its elements. In the majority of cases,
the course of shadow is dropped (a desirable effect)
and in the few cases the shadows are preserved, it
happens because of progressive propagation of colors
during inpainting of texture. The backlashes of our
method are those single dark spots which stem from
the inaccuracies of the classification result: The part
of the fac¸ade close to a window is sometimes propa-
gated by pixels stemming from a window, but spuri-
ously classified as wall.
5.3 Comparison with CNN-based
Approach
In this section, we compare the result of our algorithm
with the state-of the-art CNN based method presented
in section 3.3. It is important to note that the net
not only fills the hole but affects the whole image,
which happens because before application, the (ten)
test images must be radiometrically and geometrically
corrected. By comparing both right-most columns
of Figure 4 we see, that our method better reflects
the facade elements. The CNN-based method often
produced wrongly reconstructed shapes of doors and
windows. The undesired effect of course of shadows,
which are clearly not present in original wall texture,
is more visible here. Also the blurring artifacts are ev-
Context-aware Patch-based Method for Façade Inpainting
215
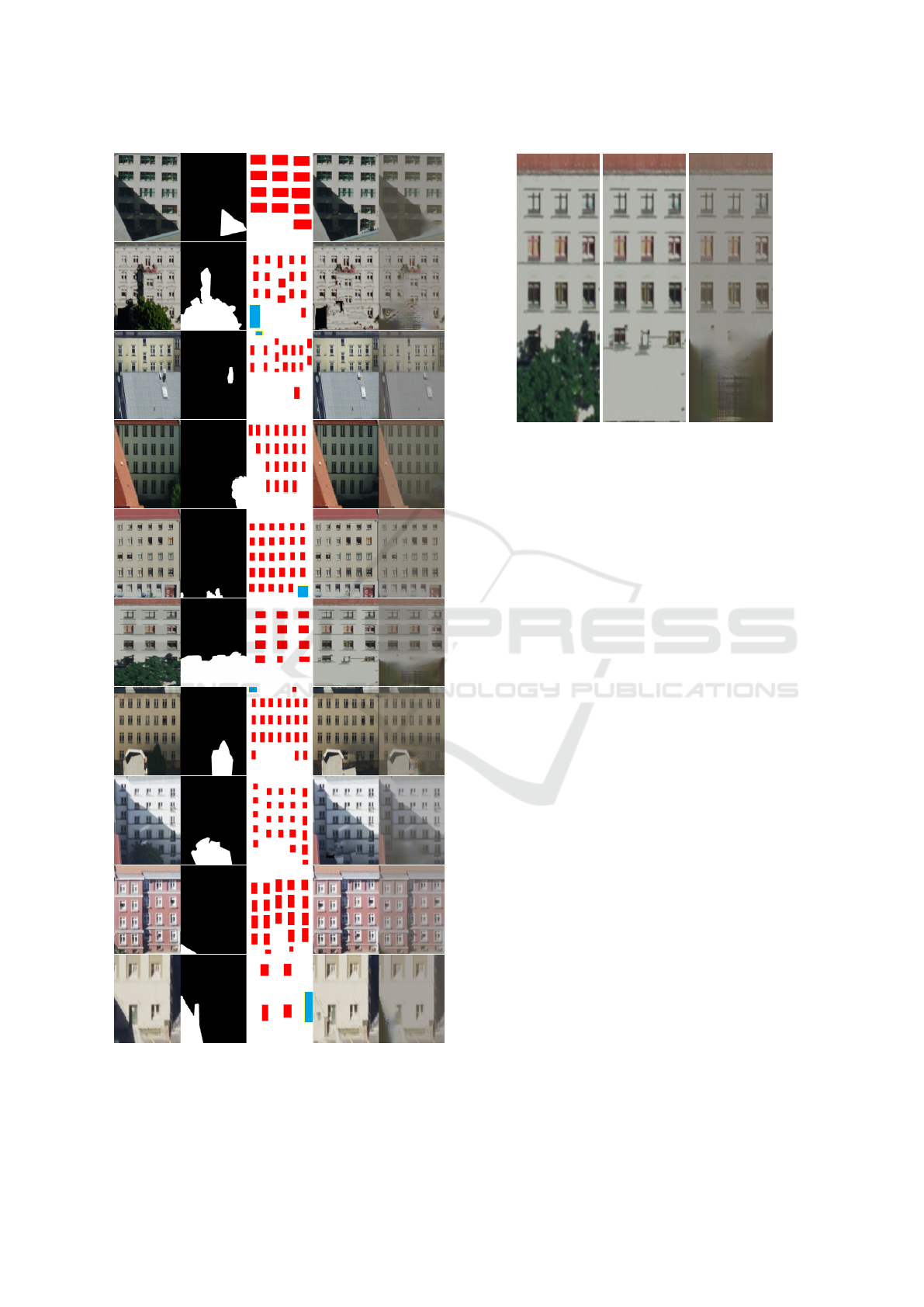
Figure 4: Overview of the data set and results. From left
to right: original images, occlusion masks, inpainting using
our method, and result of CNN-based inpainting method.
Please note that some images were rescaled in order to bet-
ter fit the page (among other image 5, shown in page 7).
Figure 5: Detail view of image 5. From left to right: original
image, result of modified Criminisi et al., result of CNN
based method.
ident. In Figure 5, we show more detailed comparison
of both methods by exemplifying the fifth image. We
feel confirmed in our observations about blurring and
shadow course. While the proposed method nicely re-
constructed the bottom row of windows, in the CNN-
based result, a door seems to have been hallucinated
despite no blue box was detected in the fifth row of
Figure 4. But apparently, it was enough that a frontal
door was present in many training images. Moreover,
the grid structure of the door is caused by the decon-
volution based on nearest neighbor. In the middle im-
age, one could argue that the homogeneous texture of
the bottom part of the fac¸ade combined with some ar-
tifacts resulting from the inaccurate classification may
appear fake, but we believe that the interactive user
could better interpret this result than that on the right.
5.4 Textured 3D Model
Figure 6 shows the result included in the LoD3 model
output in the pipeline of (Zhang et al., 2019). The
fac¸ade models in the database may contain concavi-
ties (window inserts) and convexities (balconies). The
presented inpainting is a suitable method to enhance
the result and to improve the visual impression. In
contrast to the CNN-based method, it is also suitable
for closing very large occlusions, e.g. a tree that cov-
ers about one third of the wall. A further advantage
in connection with the training of rapid response mis-
sions is that only identified fac¸ade details are added.
Within virtual training and rehearsal of such missions,
the participants are supposed to find doors and win-
dows only on the spot where they actually are.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
216

(a)
(b)
Figure 6: Example of an inpainted LoD3 model: (a) in-
painted model, (b) original model (down).
6 CONCLUSIONS
In quick response and virtual reality applications, it is
often important for the user to be able to orient him or
herself in the unknown terrain. In many applications,
not only a visually appealing model is important, but
also the trustworthiness of observed information. We
have shown that considering classification results im-
proves the inpainting result. In addition to the orig-
inal procedure of (Criminisi et al., 2004), we use an
approximated inpainting result that includes classes
straightforward; in the second step, we control the re-
sult by weighting them. Cleaned textures are partic-
ularly useful to adjust the scenario for different sea-
sons. An example is shown in Figure 1, a model was
adapted for a winter scenario, where the uncleaned
textures are particularly disturbing. Another ques-
tion is whether inpainted texture images help to im-
prove the detection results and clustering results in
turn. We compared the detection results of two pairs
of original and inpainted texture images. The compar-
ison shows that inpainting does not necessarily im-
prove the detection or clustering results. The paper
shows that patch-based methods are in no way infe-
rior to a CNN-based method and thereby, we believe
to have proved the methodological principle. Addi-
tionally, the method still have potential to exploit. For
example, we have concentrated on RGB-color space
and have performed inpainting channel-by-channel.
However, there are sources in the literature, such as
(Cao et al., 2011) that pointed out that there are color
spaces better suitable for inpainting tasks. It is also
clear that if the instances of the same class have dif-
ferent colors (for example, green, blue, and red win-
dow), then color averaging would produce colors not
present so far. Thus color averaging can be replaced
by identification of accumulation points. With respect
to CNN-based generation, it would make sense to use
the results obtained by our method as training data
in order to improve the results of Sec 5.3. Other
CNN-based workflows, including generative adver-
sarial networks, seem to be a promising tool as well.
Finally, the mask for occluding object was created
manually. This is clearly not affordable in applica-
tions and therefore, a unified concept incorporating
this step into context-aware segmentation is highly
desirable.
ACKNOWLEDGMENTS
Many thanks to the student assistant Ludwig List from
Fraunhofer IOSB for providing the NVIDIA neural
network inpainting result.
REFERENCES
Bertalmio, M., Bertozzi, A. L., and Sapiro, G. (2001).
Navier-stokes, fluid dynamics, and image and video
inpainting. In IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, 2001, vol-
ume 1, pages I–355.
Bulatov, D., H
¨
aufel, G., Meidow, J., Pohl, M., Solbrig, P.,
and Wernerus, P. (2014a). Context-based automatic
reconstruction and texturing of 3D urban terrain for
quick-response tasks. ISPRS Journal of Photogram-
metry and Remote Sensing, 93:157–170.
Bulatov, D., H
¨
aufel, G., Solbrig, P., and Wernerus, P.
(2014b). Automatic representation of urban terrain
models for simulations on the example of VBS2. In
SPIE Security+ Defence, pages 925012–925012. In-
ternational Society for Optics and Photonics.
Buyssens, P., Daisy, M., Tschumperl
´
e, D., and L
´
ezoray,
O. (2015). Exemplar-based inpainting: Technical re-
view and new heuristics for better geometric recon-
structions. IEEE Transactions on image processing,
24(6):1809–1824.
Cao, F., Gousseau, Y., Masnou, S., and P
´
erez, P. (2011). Ge-
ometrically guided exemplar-based inpainting. SIAM
Journal on Imaging Sciences, 4(4):1143–1179.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 801–818.
Criminisi, A., P
´
erez, P., and Toyama, K. (2004). Region
filling and object removal by exemplar-based image
inpainting. IEEE Transactions on Image Processing,
13(9):1200–1212.
Efros, A. A. and Leung, T. K. (1999). Texture synthesis by
non-parametric sampling. In Proceedings of the 7th
IEEE International Conference on Computer Vision,
volume 2, pages 1033–1038.
Guo, S., Xiong, X., Liu, Z., Bai, X., and Zhou, F. (2018).
Infrared simulation of large-scale urban scene through
LOD. Optics express, 26(18):23980–24002.
Context-aware Patch-based Method for Façade Inpainting
217

Kottler, B., Bulatov, D., and Schilling, H. (2016). Im-
proving semantic orthophotos by a fast method based
on harmonic inpainting. In 9th IAPR Workshop on
Pattern Recogniton in Remote Sensing (PRRS), 2016,
pages 1–5.
Le Meur, O., Gautier, J., and Guillemot, C. (2011).
Examplar-based inpainting based on local geometry.
In 2011 18th IEEE International Conference on Im-
age Processing, pages 3401–3404.
Liu, G., Reda, F. A., Shih, K. J., Wang, T.-C., Tao, A., and
Catanzaro, B. (2018). Image inpainting for irregular
holes using partial convolutions. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 85–100.
Loch-Dehbi, S. and Pl
¨
umer, L. (2015). Predicting building
fac¸ade structures with multilinear Gaussian graphical
models based on few observations. Computers, Envi-
ronment and Urban Systems, 54:68–81.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Rossi, R. E., Dungan, J. L., and Beck, L. R. (1994). Kriging
in the shadows: geostatistical interpolation for remote
sensing. Remote Sensing of Environment, 49(1):32–
40.
Sch
¨
onlieb, C.-B. and Bertozzi, A. (2011). Unconditionally
stable schemes for higher order inpainting. Commun.
Math. Sci, 9(2):413–457.
Shalunts, G., Haxhimusa, Y., and Sablatnig, R. (2011). Ar-
chitectural style classification of building fac¸ade win-
dows. In International Symposium on Visual Comput-
ing, pages 280–289.
Shen, H., Li, X., Cheng, Q., Zeng, C., Yang, G., Li, H., and
Zhang, L. (2015). Missing information reconstruc-
tion of remote sensing data: A technical review. IEEE
Geoscience and Remote Sensing Magazine, 3(3):61–
85.
Telea, A. (2004). An image inpainting technique based on
the fast marching method. Journal of graphics tools,
9(1):23–34.
Vanegas, C. A., Aliaga, D. G., and Bene
ˇ
s, B. (2010). Build-
ing reconstruction using manhattan-world grammars.
In 2010 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, pages 358–365.
Wenzel, S. and F
¨
orstner, W. (2016). Fac¸ade interpretation
using a marked point process. ISPRS Annals of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, 3:363–370.
Xiao, J., Fang, T., Tan, P., Zhao, P., Ofek, E., and Quan, L.
(2008). Image-based fac¸ade modeling. ACM Trans-
actions on Graphics (TOG), 27(5):161.
Yeh, R. A., Chen, C., Yian Lim, T., Schwing, A. G.,
Hasegawa-Johnson, M., and Do, M. N. (2017). Se-
mantic image inpainting with deep generative models.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 5485–5493.
Zhang, X., Lippoldt, F., Chen, K., Johan, H., and Erdt,
M. (2019). A data-driven approach for adding fac¸ade
details to textured LoD2 CityGML models. In Pro-
ceedings of the 14th International Joint Conference
on Computer Vision, Imaging and Computer Graph-
ics Theory and Applications, VISIGRAPP, pages 294–
301.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
218
